Изобретение относится к области мониторинга подвижных объектов, преимущественно наземных транспортных средств, например автомобилей.
Изобретение может быть использовано в приборостроении для производства систем мониторинга подвижных объектов, а также в организациях и учреждениях, занимающихся разработкой, испытанием и эксплуатацией указанных систем связи, в частности в органах внутренних дел.
Известен способ мониторинга состояния и местоположения транспортных средств, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающую в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющуюся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов (патент Российской Федерации №2348551, G08G 1/13, опубликовано в 2009 г.) Данный способ используется в основном для мониторинга угнанных транспортных средств, и в случае передачи данных в УКВ диапазоне возможно наложение сигналов от нескольких подвижных объектов друг на друга, что снижает надежность и эффективность мониторинга подвижных объектов, а в некоторых ситуациях может привести к невозможности мониторинга.
Известен также способ связи при мониторинге подвижных объектов, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающую в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющуюся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов (Патент Российской Федерации №2273055, G08G 1/137, опубликовано в 2006 г.) Этот способ выбран в качестве прототипа предложенного решения.
Недостатком данного способа является то, что сотовый канал не позволяет полностью перекрывать всю зону, так как зависит от рельефа местности, от плотности расположения антенн приема и передачи, надежность связи зависит от метеоусловий, и в случае передачи данных в УКВ диапазоне возможно наложение сигналов от нескольких подвижных объектов друг на друга, что снижает надежность и эффективность мониторинга подвижных объектов, а в некоторых ситуациях может привести к невозможности мониторинга.
В предложенном изобретении ставится техническая задача создания такого способа связи при мониторинге подвижных объектов, в котором реализована более высокая упорядоченность передачи данных от подвижных объектов к центру мониторинга и помехоустойчивость связи, что в целом обеспечивает более высокую надежность и эффективность для способа связи при мониторинге подвижных объектов центром мониторинга, что особенно важно при мониторинге транспортных средств, проводимом, например, органами внутренних дел.
Решение данной технической задачи обеспечивается за счет того, что используют способ связи при мониторинге подвижных объектов, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга. Он включает в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов. В данном способе используют канал связи в УКВ диапазоне, в котором производят синхронизацию по времени передачи данных от каждого подвижного объекта, например, со временем спутников глобальной системы радионавигации, например системы GPS или ГЛОНАСС. При этом используют внутрикадровое распределение по времени передачи данных от бортового оборудования каждого подвижного объекта к центру мониторинга, где каждый кадр разбивается на слоты, и каждый номер слота в кадре соответствует номеру подвижного объекта.
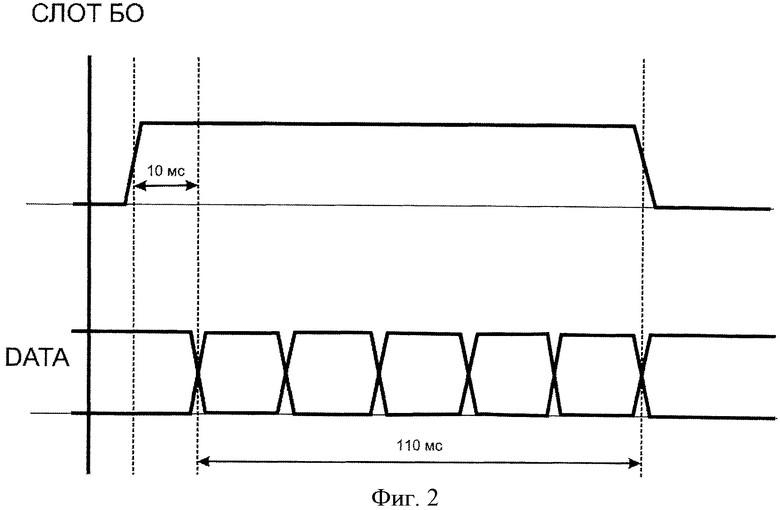
Предлагаемый способ связи при мониторинге и управлении подвижными объектами поясняется с помощью прилагаемых чертежей. На фиг.1. изображено распределение слотов внутри кадра. SLOT 1 - это слот для передачи данных от бортового оборудования (на схеме БО 1) подвижного объекта с номером 1. SLOT 2 - это слот для передачи данных от бортового оборудования подвижного объекта номер 2. И так далее.
Временная диаграмма слота бортового оборудования показана на фиг.2. Здесь также БО - бортовое оборудование, DATA - канал передачи данных. Остальные слоты идентичны, отличие только в длительности передачи данных.
Сущность предлагаемого изобретения заключается в следующем. Используют способ связи при мониторинге подвижных объектов. В этом способе осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга. Также способ включает в себя определение координат местоположения и других параметров движения подвижных объектов. Эти параметры осуществляются по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС. Также они могут быть определены по картине поля сотовой связи. Способ связи включает в себя также передачу данных о состоянии отдельных подсистем подвижных объектов.
В системе мониторинга производят связь в УКВ диапазоне. Для разделения каналов связи с бортовым оборудованием используется временная схема распределения канала. Канал делится на кадры, например на 10-секундные. Начало каждого кадра соответствует началу секунды, кратной 10 (момент начала секунды определяется по таймпульсу).
Каждый кадр делится, в свою очередь, на слоты, как минимум по числу подвижных объектов. Каждое бортовое оборудование характеризуется адресом, который выбирается из диапазона 1…60. См. фиг.1. Адрес бортового оборудования назначается либо на этапе конфигурирования, либо во время процедуры автоматической регистрации. Дублирование адресов бортового оборудования на одном канале данных от бортового оборудования к центру мониторинга не допускается. Размер каждого слота - 120 мс. Между слотами бортового оборудования существуют 10-миллисекундные зазоры, которые позволяют дольше работать от внутренних часов в случае пропадания сигналов ГЛОНАСС / GPS.
И центр мониторинга, и бортовое оборудование выходят в эфир только после получения валидного времени UTC посредством ГЛОНАСС/GPS.
Каждое бортовое оборудование начинает готовиться к передаче за 200 мс до начала своего слота, т.е., когда еще выполняются чужие слоты. В момент начала своего слота бортовое оборудование переключается на передачу, отрабатывает паузу в 10 мс и передает свои данные.
Также в каждом кадре оставляется возможность передачи аварийных посылок и прочих данных, для чего могут быть зарезервированы некоторые дополнительные слоты внутри кадра. На фиг.1 обозначено как «Резерв».
Данные от бортового оборудования к центру мониторинга передаются пакетами. См. фиг.2. Каждый пакет состоит из стартовой синхропоследовательности, тела пакета, контрольной суммы и завершающих битов.
Все байты посылки, кроме преамбулы, при передаче кодируются кодом Хемминга, который добавляет к каждому байту еще 4 бита. Код Хэмминга позволяет исправлять однократные и обнаруживать двукратные ошибки. Согласно проведенным исследованиям этого достаточно для поддержания устойчивой передачи данных по радиоканалу. В конце посылки всегда дополнительно передаются 2 нулевых бита для обеспечения нормального приема данных модемами. Синхропоследовательность состоит из предваряющей последовательности 0 и 1 и синхрослова для определения начала посылки в потоке данных. Для уменьшения вероятности пропуска синхрослова алгоритм поиска преамбулы во входном потоке бит должен допускать до двух неправильно принятых бит. Предпочтительным может являться замена предваряющей последовательности и синхрослова на синхрослово увеличенной длины с соответствующим увеличением количества возможных ошибочных бит.
Заявленный способ связи при мониторинге подвижных объектов может быть осуществлен в промышленности с применением освоенных современных технологий, материалов и процессов и может быть использован для производства систем мониторинга подвижных объектов, а также в организациях и учреждениях, занимающихся разработкой, испытанием и эксплуатацией указанных систем связи.
Предложенный способ связи при мониторинге подвижных объектов находится в опытной эксплуатации в Калужском филиале Главного управления научно-производственного объединения «Специальная техника и связь» Министерства внутренних дел России. Опытная эксплуатация показала более высокую упорядоченность передачи данных от подвижных объектов к центру мониторинга и помехоустойчивость связи по сравнению с существующими способами, что в целом обеспечивает более высокую надежность и эффективность для способа связи при мониторинге подвижных объектов центром мониторинга, что особенно важно при мониторинге транспортных средств, проводимом, например, органами внутренних дел.
Уже выпускаемое в настоящий момент бортовое оборудование может работать в двух режимах: симплексном и дуплексном. Симплексный режим - односторонняя передача данных в центр мониторинга без ожидания данных от центра мониторинга. Дуплексный режим - двухсторонний обмен данными с центром мониторинга. В предлагаемом способе связи в симплексном режиме бортовое оборудование выходит в эфир в заданный при конфигурации временной слот, без ожидания посылок данных от центра мониторинга, но при этом бортовое оборудование привязывает свои ответы к точному глобальному времени. Таким образом, предлагаемый способ позволяет расширить функциональные возможности симплексного бортового оборудования путем включения его в более общую систему, поддерживающую дуплексную связь. Именно поэтому этот способ рекомендован к использованию для мониторинга транспортных средств органам внутренних дел и другим организациям, что особенно важно при мониторинге транспортных средств, проводимом, например, органами внутренних дел с использованием имеющегося оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОКАНАЛЬНОЙ СВЯЗИ ПРИ МОНИТОРИНГЕ И УПРАВЛЕНИИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2468531C1 |
| СПОСОБ СВЯЗИ ПРИ МОНИТОРИНГЕ И УПРАВЛЕНИИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2470489C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| СПОСОБ НАВИГАЦИОННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ СРЕДСТВАМИ | 2014 |
|
RU2561644C1 |
| Система точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС | 2017 |
|
RU2649628C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| СИСТЕМА ТОЧНОЙ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ НАЗЕМНОЙ ИНФРАСТРУКТУРЫ ГЛОНАСС | 2015 |
|
RU2582595C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ГЛОНАСС/GPS+GSM-900/1800 | 2012 |
|
RU2509396C1 |
Изобретение относится к области мониторинга подвижных объектов, преимущественно наземных транспортных средств, например автомобилей. В предложенном способе осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга. Данные включают в себя координаты местоположения, определяемые по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи, а также другие параметры движения подвижных объектов. Кроме того, передаются данные о состоянии отдельных подсистем подвижных объектов. Используют канал связи в УКВ диапазоне, в котором производят синхронизацию по времени передачи данных от каждого подвижного объекта, например, со временем спутников глобальной системы радионавигации, например системы GPS или ГЛОНАСС. Осуществляют внутрикадровое распределение по времени передачи данных от бортового оборудования каждого подвижного объекта к центру мониторинга, где каждый кадр разбивается на слоты, и каждый номер слота в кадре соответствует номеру подвижного объекта. Изобретение обеспечивает повышение надежности и эффективности связи при мониторинге. 2 ил.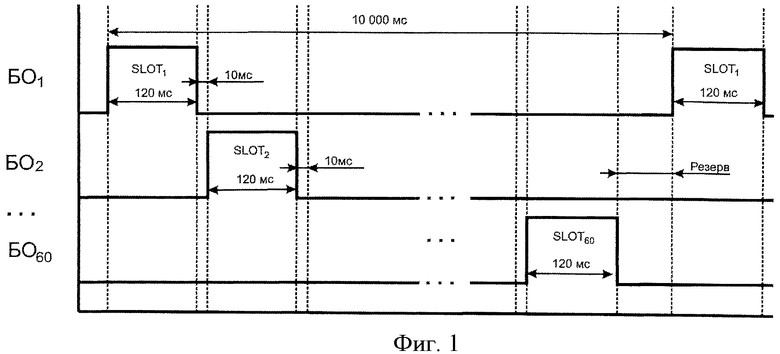
Способ связи при мониторинге подвижных объектов, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающую в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов, отличающийся тем, что используют канал связи в УКВ диапазоне, в котором производят синхронизацию по времени передачи данных от каждого подвижного объекта, например, со временем спутников глобальной системы радионавигации, например системы GPS или ГЛОНАСС, при этом используют внутрикадровое распределение по времени передачи данных от бортового оборудования каждого подвижного объекта к центру мониторинга, где каждый кадр разбивается на слоты, и каждый номер слота в кадре соответствует номеру подвижного объекта.
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| СИСТЕМА КОНТРОЛЯ, НАВИГАЦИИ И МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2004 |
|
RU2268175C1 |
| СИСТЕМА МОНИТОРИНГА КООРДИНАТ И КОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2237925C1 |
| Безвентиляторная воздушная скороморозилка | 1948 |
|
SU76153A1 |

