Изобретение относится к области мониторинга, сопровождения и управления подвижными объектами, преимущественно наземными транспортными средствами, например автомобилями.
Изобретение может быть использовано в приборостроении для производства систем мониторинга, сопровождения и управления подвижными объектами, а также в организациях и учреждениях, занимающихся разработкой, испытанием и эксплуатацией указанных систем связи, в частности в органах внутренних дел.
Известен способ мониторинга состояния и местоположения транспортных средств, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающий в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов, при этом производят передачу данных, например запросов, от центра мониторинга к бортовому оборудованию по радиоэфиру, используя объектовый терминал стандартной сотовой сети подвижной связи, например GSM-сети, и/или объектовый приемопередатчик ретрансляционного канала (патент Российской Федерации №2348551, G08G 1/13, опубликовано в 2009 г.). Данный способ используется в основном для мониторинга угнанных транспортных средств, и в случае передачи данных в УКВ диапазоне возможно наложение сигналов от нескольких подвижных объектов друг на друга, что снижает надежность и эффективность мониторинга подвижных объектов, а в некоторых ситуациях может привести к невозможности мониторинга.
Известен также способ многоканальной связи при мониторинге и управлении подвижными объектами, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающий в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов, при этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию (Патент Российской Федерации №2273055, G08G 1/137, опубликовано в 2006 г.).
Этот способ выбран в качестве прототипа предложенного решения.
Недостатком данного способа является то, что центр мониторинга в некоторых случаях не может иметь двустороннюю связь с бортовым оборудованием подвижного объекта, так как наличие связи по радиоканалу зависит от рельефа местности и от метеоусловий, а связь по каналу GSM в некоторых местах отсутствует, так же как и спутниковая связь может быть временно неактивна, что может привести к прекращению мониторинга и управления, что недопустимо, особенно при мониторинге подвижных объектов органами внутренних дел.
В предложенном изобретении ставится техническая задача расширения зоны охвата мониторинга одним центром мониторинга при использовании канала связи в УКВ диапазоне при обеспечении высокой надежности и эффективности связи.
Решение технической задачи достигается за счет того, что в способе многоканальной связи при мониторинге и управлении подвижными объектами, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающем в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи. Также в него включают передачу данных о состоянии отдельных подсистем подвижных объектов, при этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию. Вводятся дополнительные базовые станции, соединенные с центром мониторинга, которые осуществляют связь с подвижными объектами по каналам спутниковой, сотовой и радиосвязи. При этом канал радиосвязи находится в УКВ диапазоне и имеет временную покадровую схему распределения сигналов базовых станций и внутрикадровое распределение данных от бортового оборудования каждого подвижного объекта. При этом покадровое распределение сигналов базовых станций и внутрикадровая передача данных от базовых станций к бортовому оборудованию подвижных объектов и от бортового оборудования к базовым станциям синхронизированы со временем спутников глобальной системы радионавигации, например системы GPS или ГЛОНАСС.
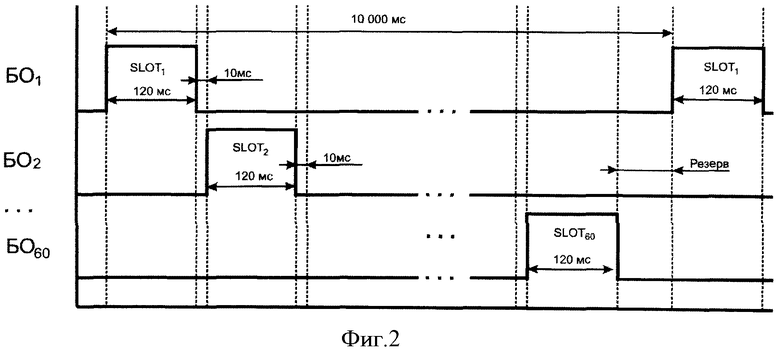
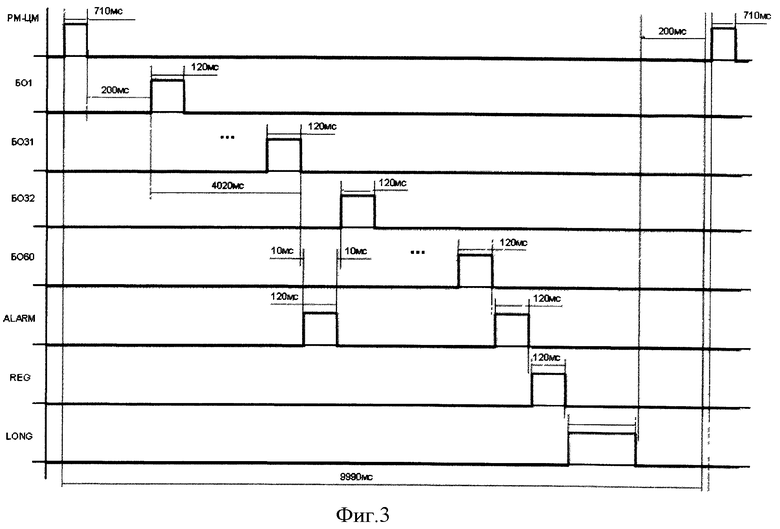
Предлагаемый способ многоканальной связи при мониторинге и управлении подвижными объектами поясняется с помощью прилагаемых чертежей. На фиг.1. изображена общая схема центра мониторинга с двумя базовыми станциями и подвижными объектами, в которой показан только канал связи, который находится в УКВ диапазоне. На фиг.2 показана покадровая развертка канала связи при использовании базовых станций, где номер кадра соответствует номеру базовой станции. На фиг.3 показано внутрикадровое распределение посылок данных.
Сущность изобретения заключается в следующем: в способе многоканальной связи при мониторинге и управлении подвижными объектами осуществляют передачу данных от бортового оборудования 1 (см. фиг.1), установленного на подвижных объектах 2, к центру мониторинга 3. Данные включают в себя определение координат местоположения и других параметров движения подвижных объектов 2, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи. Также сигналы включают в себя передачу данных о состоянии отдельных подсистем подвижных объектов. Данные от подвижных объектов передаются по имеющимся каналам связи, а именно по каналам спутниковой, сотовой и радиосвязи. На фигуре показан только канал связи 4, который находится в УКВ диапазоне. Передача данных, например запросов или управляющих команд, от центра мониторинга 3 к бортовому оборудованию 1 производится также по каналам связи 4.
Для расширения зоны охвата вводятся дополнительные базовые станции 5, соединенные с центром мониторинга 3, которые осуществляют связь с подвижными объектами по каналам спутниковой, сотовой и радиосвязи. При этом канал радиосвязи находится в УКВ диапазоне.
В канале связи, находящемся в УКВ диапазоне, используют два канала связи. Один из них - голосовой - для передачи данных и запросов от центра мониторинга к бортовому оборудованию через базовые станции. Канал также может использоваться для обмена голосовыми сообщениями между экипажами подвижных объектов.
Другой - канал данных, который используется для передачи информации от бортового оборудования в центр мониторинга через базовые станции. Возможна организация связи с базовыми станциями по нескольким каналам данных на разных частотах. При такой реализации данные от центра мониторинга к бортовому оборудованию через базовые станции передаются на одном общем голосовом канале, а данные от бортового оборудования через базовые станции к центру мониторинга передаются параллельно по нескольким обратным каналам связи.
Канал радиосвязи имеет временную покадровую схему распределения сигналов базовых станций, что позволяет производить двустороннюю связь между центром мониторинга и подвижными объектами без негативного наслаивания данных ввиду наличия нескольких базовых станций, осуществляющих связь с одними и теми же подвижными объектами в одном и том же голосовом канале.
Покадровая схема распределения сигналов заключается в том, что между кадрами передачи данных от базовых станций разделяются кадры, в которые они выходят в эфир. Например, при использовании двух станций первая выходит в четных кадрах, вторая - в нечетных. При использовании трех станций между ними разделяются 3 кадра и т.д.
На фиг.2 схематично изображена покадровая развертка канала связи при использовании базовых станций, где номер кадра соответствует номеру базовой станции. Обозначено: SYNC - синхропосылка от центра мониторинга (на схеме обозначено как ЦМ), которая синхронизирована со временем спутников глобальной системы радионавигации, например системы GPS или ГЛОНАСС, которая находится на голосовом канале и продолжается 710 мс. Синхропосылка повторяется каждые 10 с. SLOT 2 - это слот для передачи данных от первой базовой станции (на схеме БС1). SLOT 2 - это слот для передачи данных от второй базовой станции (на схеме БС2). И так далее. Продолжительность каждого слота - 10 с. После N-й базовой станции наступает очередь снова первой.
В свою очередь, для предотвращения одновременной передачи данных от разных подвижных объектов на одном канале используется внутрикадровая временная схема распределения данных (см. фиг.3).
Канал делится на кадры, например на 10-секундные. Начало каждого кадра соответствует началу секунды, кратной 10 (момент начала секунды определяется по таймпульсу).
Каждый кадр делится в свою очередь на слоты, например, такие:
- слот команд и синхропосылок от центра мониторинга;
- 60 слотов данных от бортового оборудования;
- два слота для передачи тревожных сообщений;
- слот для ответа на команды центра мониторинга.
Каждое бортовое оборудование характеризуется адресом, который выбирается из диапазона 1…60. Адрес бортового оборудования назначается либо на этапе конфигурирования, либо во время процедуры автоматической регистрации. Дублирование адресов бортового оборудования на одном канале данных от бортового оборудования к центру мониторинга через базовые станции не допускается.
При данном способе связи покадровое распределение сигналов базовых станций и внутрикадровая передача данных от базовых станций к бортовому оборудованию подвижных объектов и от бортового оборудования к базовым станциям синхронизированы со временем спутников глобальной системы радионавигации, например системы GPS или ГЛОНАСС.
Центр мониторинга, базовые станции и бортовое оборудование выходят в эфир только после получения валидного времени UTC посредством ГЛОНАСС/GPS.
Центр мониторинга в свой слот, привязанный к началу каждой 10 секунды, переключает свою радиостанцию на передачу, ждет 10 мс, а затем передает свою команду. Сразу после окончания слота центра мониторинга начинается пустой слот, во время которого центр мониторинга готовится к приему данных, переключаясь на канал данных, а к передаче, в свою очередь, готовится первое бортовое оборудование. Аналогично, каждое бортовое оборудование начинает готовиться к передаче за 200 мс до начала своего слота, т.е. когда еще выполняются чужие слоты. В момент начала своего слота бортовое оборудование переключается на передачу, отрабатывает паузу в 10 мс и передает свои данные.
Дополнительно между слотами бортового оборудования существуют 10 мс зазоры, которые позволяют дольше работать от внутренних часов в случае пропадания сигналов ГЛОНАСС/GPS: в середине и в конце каждого кадра вставляются тревожные слоты. Они могут быть заняты любым бортовым оборудованием, у которого есть сообщение о тревоге. Если это сообщение успешно принято в центр мониторинга, то в следующей синхропосылке он сгенерирует подтверждение для соответствующего бортового оборудования. Если тревожное сообщение не было принято, то потревоженное БО передаст свое сообщение в следующем кадре.
Предпоследним в кадре идет слот для передачи сообщения о регистрации в данном центре мониторинга. Последним в кадре идет слот для ответа на команду из центра мониторинга.
На фиг.3 изображено распределение слотов внутри кадра. Обозначено: SYNC - синхропосылка от центра мониторинга (на схеме обозначено как ЦМ) на голосовом канале продолжительностью 710 мс, после которой центр мониторинга переключается на канал данных. Для этого выделяется 200 мс. SLOT 1 - это слот для передачи данных от бортового оборудования (на схеме БО 1) подвижного объекта с номером 1. SLOT 2 - это слот для передачи данных от бортового оборудования подвижного объекта номер 2. И так далее. Размер каждого слота - 120 мс. Между слотами данных от подвижных объектов с номерами 30 и 31, а также после номера 60 передаются слоты с возможными тревожными сообщениями, на фиг.1 обозначенные как ALARM SLOT. Предпоследний слот в кадре обозначен как REGISTER SLOT - слот для передачи сообщения о регистрации в данном центре мониторинга продолжительностью 120 мс. Заключительный слот в кадре - LONG SLOT - ответ на команду из центра мониторинга. Его длительность 680 мс.
Заявленный способ многоканальной связи при мониторинге и управлении подвижными объектами может быть осуществлен в промышленности с применением освоенных современных технологий, материалов и процессов и может быть использован для производства систем мониторинга, сопровождения и управления подвижными объектами, а также в организациях и учреждениях, занимающихся разработкой, испытанием и эксплуатацией указанных систем связи, например органами внутренних дел.
Предложенный способ многоканальной связи при мониторинге и управлении подвижными объектами находится в опытной эксплуатации в Калужском филиале Главного Управления Научно-Производственного Объединения «Специальная техника и связь» Министерства Внутренних Дел России. Опытная эксплуатация показала охват более широкой зоны мониторинга и управления одним центром мониторинга при обеспечении высокой надежности связи по сравнению с существующими способами. При этом при осуществлении многоканальной связи в УКВ диапазоне исключено наложение сигналов от различных базовых станций и от различных подвижных объектов друг на друга, что обеспечивает высокую надежность и эффективность связи.
Этот способ рекомендован к использованию для мониторинга и управления транспортными средствами органами внутренних дел и другими организациями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СВЯЗИ ПРИ МОНИТОРИНГЕ И УПРАВЛЕНИИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2471311C1 |
| СПОСОБ СВЯЗИ ПРИ МОНИТОРИНГЕ И УПРАВЛЕНИИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2011 |
|
RU2470489C1 |
| Способ экстренного оповещения при опасных ситуациях и авариях на дорогах | 2019 |
|
RU2728951C1 |
| Система точной навигации подвижных объектов с использованием данных наземной инфраструктуры ГЛОНАСС | 2017 |
|
RU2649628C1 |
| СИСТЕМА ТОЧНОЙ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ НАЗЕМНОЙ ИНФРАСТРУКТУРЫ ГЛОНАСС | 2015 |
|
RU2582595C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ ПОТРЕБИТЕЛЕЙ МОНИТОРИНГОВОЙ ИНФОРМАЦИЕЙ (МКОПМИ) | 2011 |
|
RU2475968C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ И СЛЕЖЕНИЯ ЗА УДАЛЕННЫМИ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2290763C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2014 |
|
RU2557801C1 |
Изобретение относится к области мониторинга, сопровождения и управления подвижными объектами, преимущественно наземными транспортными средствами, например автомобилями. В предложенном способе осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга. Данные включают в себя координаты местоположения, определяемые по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС, и/или по картине поля сотовой связи, а также другие параметры движения подвижных объектов. Кроме того, передаются данные о состоянии отдельных подсистем подвижных объектов. При этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию. Вводятся дополнительные базовые станции, соединенные с центром мониторинга, которые осуществляют связь с подвижными объектами по каналам спутниковой, сотовой и радиосвязи. Канал радиосвязи находится в УКВ диапазоне и имеет временную покадровую схему распределения сигналов базовых станций и внутрикадровое распределение данных от бортового оборудования каждого подвижного объекта. Покадровое распределение сигналов базовых станций и внутрикадровая передача данных от базовых станций к бортовому оборудованию подвижных объектов и от бортового оборудования к базовым станциям синхронизированы со временем спутников глобальной системы радионавигации, например системы GPS или ГЛОНАСС. Изобретение обеспечивает расширение зоны охвата мониторинга и управления одним центром мониторинга при повышении надежности и эффективности связи при мониторинге и управлении. 3 ил.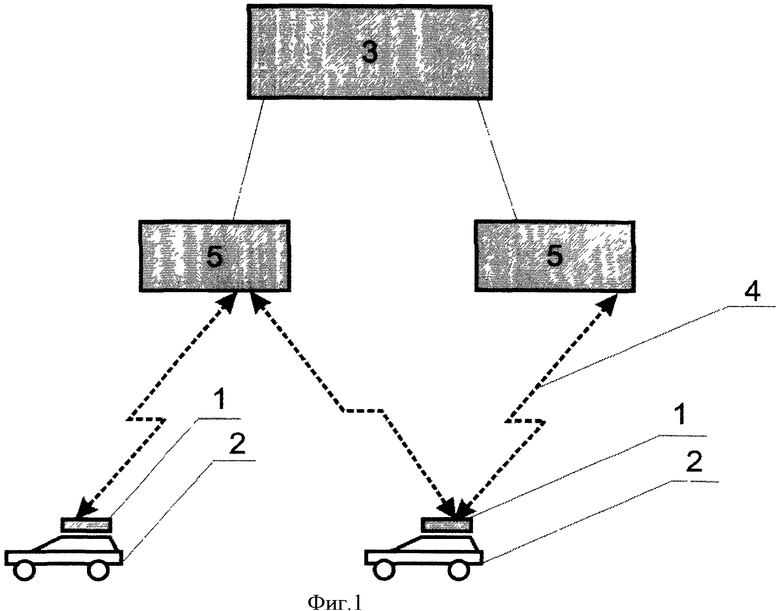
Способ многоканальной связи при мониторинге и управлении подвижными объектами, при котором осуществляют передачу данных от бортового оборудования, установленного на подвижных объектах, к центру мониторинга, включающую в себя определение координат местоположения и других параметров движения подвижных объектов, осуществляющееся по данным навигационных сигналов, принимаемых от спутников глобальной системы радионавигации, например от системы GPS или ГЛОНАСС и/или по картине поля сотовой связи, а также передачу данных о состоянии отдельных подсистем подвижных объектов, при этом производят передачу данных, например запросов или команд, от центра мониторинга к бортовому оборудованию, отличающийся тем, что вводятся дополнительные базовые станции, соединенные с центром мониторинга, которые осуществляют связь с подвижными объектами по каналам спутниковой, сотовой и радиосвязи, при этом канал радиосвязи находится в УКВ-диапазоне и имеет временную покадровую схему распределения запросов и команд от базовых станций и внутрикадровое распределение данных от бортового оборудования каждого подвижного объекта, причем покадровое распределение запросов и команд от базовых станций и внутрикадровая передача данных от базовых станций к бортовому оборудованию подвижных объектов и от бортового оборудования к базовым станциям синхронизированы со временем спутников глобальной системы радионавигации, например системы GPS или ГЛОНАСС.
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| СИСТЕМА КОНТРОЛЯ, НАВИГАЦИИ И МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2004 |
|
RU2268175C1 |
| СИСТЕМА МОНИТОРИНГА КООРДИНАТ И КОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2237925C1 |
| Безвентиляторная воздушная скороморозилка | 1948 |
|
SU76153A1 |

