Область применения изобретения
Настоящее изобретение имеет отношение к способам управления синхронизацией силовых преобразователей, работающих с широтно-импульсной модуляцией (ШИМ), которые могут быть использованы для сопряжения генераторов, создающих переменное напряжение с переменной частотой, с электрической сетью или с питающей электрической сетью, которые имеют номинально фиксированные напряжение и частоту. Однако эти способы также могут быть использованы для синхронизации силовых преобразователей, работающих с ШИМ, которые могут быть использованы, например, для сопряжения двигателя, требующего переменного напряжения с переменной частотой, с питающей электрической сетью (с шиной переменного тока), имеющей номинально фиксированные напряжение и частоту. Другие виды использования предусматривают синхронизацию силовых преобразователей, работающих с ШИМ, которые конфигурированы для обеспечения статической вольт-амперной реактивной (VAR) компенсации.
Предпосылки к созданию изобретения
Что касается первого из упомянутых здесь выше потенциальных видов использования, то можно производить преобразование энергии ветра в электрическую энергию за счет использования ветротурбины для привода ротора генератора, непосредственно или с использованием редуктора. Частота переменного тока на клеммах статора генератора ("напряжение статора") прямо пропорциональна скорости вращения ротора. Напряжение на клеммах генератора также изменяется в функции скорости и в зависимости от конкретного типа генератора от уровня магнитного потока. Для оптимальной выработки энергии скорость вращения выходного вала ветротурбины должна изменяться в соответствии со скоростью ветра, приводящего во вращение лопасти турбины. Для ограничения выработки энергии при высоких скоростях ветра скоростью вращения выходного вала управляют за счет изменения угла наклона лопастей турбины. Подключение генератора переменного напряжения с переменной частотой к питающей электрической сети, имеющей номинально фиксированные напряжение и частоту, может быть обеспечено за счет использования силового преобразователя.
Силовой преобразователь типично содержит мост генератора, который при нормальной работе действует как активный выпрямитель, подающий питание на линию постоянного тока. Мост генератора может иметь любую подходящую топологию, причем он содержит группы полупроводниковых силовых переключающих приборов, имеющих полное управление и регулирование с использованием широтно-импульсной модуляции (ШИМ).
Постоянное выходное напряжение моста генератора поступает на клеммы постоянного тока сетевого моста, который при нормальной работе действует как активный инвертор. Основное управление постоянным выходным напряжением производят за счет управления мостом генератора, однако возможны и другие способы управления напряжением на линии постоянного тока. Сетевой мост может иметь любую подходящую топологию, причем он содержит группы полупроводниковых силовых переключающих приборов, имеющих полное управление и регулирование с использованием широтно-импульсной модуляции (ШИМ).
Постоянное выходное напряжение сетевого моста фильтруют и направляют в питающую электрическую сеть, имеющую номинально фиксированную частоту, через повышающий трансформатор. Защитное распределительное устройство может быть предусмотрено для обеспечения надежного соединения с питающей электрической сетью и для изоляции системы генератора и преобразователя от питающей электрической сети в соответствии с различными эксплуатационными и неэксплуатационными требованиями.
Энергия, которую вводят в питающую электрическую сеть, должна отвечать требованиям, приведенным в различных стандартах и нормах, касающихся электрической сети. Например, в соответствии с одним из важных стандартов амплитуда гармонических искажений напряжения, связанная с боковыми полосами частоты переключения, должна составлять менее 0.2% амплитуды напряжения питающей электрической сети на основной частоте.
Модуляцию ШИМ, которую используют в сетевом мосте, типично осуществляют на данной частоте переключения. Перемешивание между номинально фиксированной частотой электрической сети или питающей электрической сети и частотой переключения ШИМ создает гармоники в выходном напряжении переменного тока сетевого моста. Если два или больше силовых преобразователей подключены к общей питающей электрической сети или к электрической сети (например, в случае ветровой электростанции, где множество ветротурбин могут быть подключены к питающей электрической сети через параллельное соединение), то полные гармонические искажения напряжения в энергии, которую направляют в питающую электрическую сеть, могут превышать требуемые предельные значения, заданные для общей точки.
Сущность изобретения
В соответствии с настоящим изобретением предлагается способ управления множеством силовых преобразователей, которые могут быть использованы для сопряжения с питающей электрической сетью, причем каждый силовой преобразователь содержит сетевой мост, работающий в соответствии с широтно-импульсной модуляцией (ШИМ) с одним и тем же периодом переключения, причем каждый силовой преобразователь создает по меньшей мере одну нежелательную гармонику в напряжении питающей электрической сети, при этом способ включает в себя операцию создания периода переключения ШИМ для каждого сетевого моста с различным временным сдвигом относительно точки отсчета времени, так что по меньшей мере одна нежелательная гармоника в напряжении питающей электрической сети будет по меньшей мере частично подавлена.
Преимущество такого способа заключается в том, что по меньшей мере одна нежелательная гармоника (например, нежелательная гармоника, возникающая за счет перемешивания номинально фиксированной частоты электрической сети или питающей электрической сети и частоты переключения ШИМ) может быть подавлена по меньшей мере частично, а в некоторых случаях подавлена полностью. В том случае когда силовой преобразователь используют для сопряжения генератора с питающей электрической сетью, тогда этот способ позволяет вводить энергию в питающую электрическую сеть при помощи матрицы сетевых мостов так, чтобы удовлетворять требованиям относительно гармонических искажений, приведенным в различных стандартах и нормах, касающихся электрической сети. В том случае когда каждый силовой преобразователь используют для сопряжения двигателя с питающей электрической сетью (или шиной), тогда этот способ позволяет снизить любые гармонические искажения в напряжении питающей электрической сети, которые возникают за счет работы каждого сетевого моста. Аналогично, в том случае когда каждый силовой преобразователь работает как статический вольт-амперный реактивный (VAR) компенсатор, тогда этот способ позволяет снизить любые гармонические искажения в напряжении питающей электрической сети, которые возникают за счет работы каждого сетевого моста.
Работой каждого силового преобразователя и, в частности, модуляцией ШИМ в соответствующем сетевом мосте можно управлять при помощи электронного контроллера. Контроллер может быть объединен с сетевым мостом или выполнен в виде автономного блока. В любом случае следует иметь в виду, что контроллер является компонентом более общего силового преобразователя, и поэтому любую ссылку в этом описании на контроллер или сетевой мост следует понимать как ссылку на соответствующий силовой преобразователь или наоборот. Более конкретно, любая упомянутая в описании операция управления, осуществляемая при помощи силового преобразователя, также может быть осуществлена при помощи контроллера или сетевого моста, если это является уместным.
Специалисты легко поймут, что в дальнейшем описании термин "точка отсчета времени", относительно которой определяют все различные временные сдвиги, может быть взята на любом фронте (например, на фронте нарастания или спада) импульса общего сигнала времени или сигнала времени, выработанного, например, при помощи "главного" силового преобразователя в каскадной схеме. Любая подходящая "точка отсчета времени" может быть использована в зависимости от обстоятельств и заданных рабочих режимов силовых преобразователей.
В соответствии с первым вариантом осуществления настоящего изобретения, способ дополнительно включает в себя операции выработки общего временного сигнала, который действует как точка отсчета времени, подачи общего временного сигнала на каждый силовой преобразователь, и создания периода переключения ШИМ каждого сетевого моста с различным временным сдвигом относительно общего временного сигнала, так что по меньшей мере одна нежелательная гармоника в напряжении питающей электрической сети будет по меньшей мере частично подавлена.
Периоды переключения ШИМ для каждого сетевого моста все номинально одинаковы и синхронизированы с общим временным сигналом, при соответствующих временных сдвигах.
В том случае когда способ используют для управления тремя параллельно включенными силовыми преобразователями, сетевой мост первого силового преобразователя может работать с ШИМ, имеющей заданный период переключения, который смещен на первый промежуток времени относительно общего временного сигнала. Сетевой мост второго силового преобразователя может работать с ШИМ, имеющей такой же заданный период переключения, который смещен на второй промежуток времени относительно общего временного сигнала. Сетевой мост третьего силового преобразователя может работать с ШИМ, имеющей такой же заданный период переключения, который смещен на третий промежуток времени относительно общего временного сигнала. Первый, второй и третий промежутки времени являются различными, причем все они выбраны так, что по меньшей мере одна нежелательная гармоника в напряжение питающей электрической сети будет по меньшей мере частично подавлена.
Промежуток времени, на который период переключения ШИМ одного из сетевых мостов сдвинут (смещен) относительно общего временного сигнала, может быть равен нулю.
Временной сдвиг ШИМ каждого сетевого моста относительно общего временного сигнала может быть выражен в процентах периода переключения ШИМ. Например, в приведенном выше случае, когда способ используют для управления тремя включенными параллельно силовыми преобразователями, сетевой мост первого силового преобразователя может работать в соответствии с ШИМ, имеющей заданный период переключения, который сдвинут на первый промежуток времени 0% периода переключения (то есть период переключения ШИМ сетевого моста первого силового преобразователя не имеет временного сдвига относительно общего временного сигнала). Сетевой мост второго силового преобразователя может работать в соответствии с ШИМ, имеющей тот же самый заданный период переключения, но который сдвинут на второй промежуток времени 33.3% периода переключения. Сетевой мост третьего силового преобразователя может работать в соответствии с ШИМ, имеющей тот же самый заданный период переключения, но который сдвинут на третий промежуток времени 66.6% периода переключения.
ШИМ можно представить как сигнал несущей, имеющий номинальную частоту ШИМ. Поэтому каждый временной сдвиг можно рассматривать как эквивалент сдвига фазы сигнала несущей ШИМ каждого сетевого моста. Если период ШИМ эквивалентен 360°, и первый, второй и третий промежутки времени равны 0%, 33.3 и 66.6% периода переключения, тогда сигнал несущей ШИМ каждого сетевого моста будет иметь сдвиг фазы на 0°, 120° и 240°, соответственно.
Само собой разумеется, что такие же принципы могут быть применены к схеме построения с любым числом включенных параллельно силовых преобразователей.
Временной сдвиг ШИМ каждого сетевого моста может быть определен со ссылкой на число силовых преобразователей, которыми управляют при помощи способа в соответствии с настоящим изобретением. Следовательно, временной сдвиг, связанный с одним или несколькими сетевыми мостами, может быть отрегулирован, если изменяется число силовых преобразователей, которые подключены к питающей электрической сети. Эта регулировка гарантирует, что по меньшей мере одна нежелательная гармоника в напряжении питающей электрической сети будет эффективно подавлена даже тогда, когда один или несколько силовых преобразователей отключают от сети или вновь подключают к сети. Если необходимо произвести регулировку специфического временного сдвига, то это преимущественно производят скорее постепенно (например, с использованием пилообразной функции), а не резко и дискретным образом.
Каждый силовой преобразователь может передавать информацию о состоянии подключения к питающей электрической сети и о надлежащей работе или о состоянии отключения. Информация о числе силовых преобразователей, подключенных к питающей электрической сети в любой данный момент времени, может быть передана на все силовые преобразователи, периодически или когда изменяется число подключенных к сети силовых преобразователей. Требования к синхронизации информации о состоянии и подключении обычно не являются такими же жесткими, как для общего сигнала времени, так как допускается, чтобы по меньшей мере одна нежелательная гармоника могла превышать уровни для гармонических искажений напряжения, заданные в различных стандартах и нормах, касающихся электрической сети, в течение относительно короткого периода времени. Информация о состоянии и информация о подключении может быть передана как сигнал беспроводной связи, например такой как радиочастотный (РЧ) сигнал, или же электрический или оптический сигнал, передаваемый по электрическому кабелю или по оптическому волокну.
Общий сигнал времени может вырабатываться при помощи автономного тактирующего контроллера и затем может поступать на все силовые преобразователи. Альтернативно, общий сигнал времени может вырабатываться при помощи одного из силовых преобразователей и затем может поступать на все остальные силовые преобразователи. Силовой преобразователь, который вырабатывает общий сигнал времени, обычно называют "главным" силовым преобразователем, а остальные силовые преобразователи обычно называют "подчиненными" силовыми преобразователями. Период переключения ШИМ сетевого моста "главного" силового преобразователя должен иметь фазу, совпадающую с фазой общего сигнала времени, и должен иметь соответствующий временной сдвиг относительно общего временного сигнала, как уже было указано здесь выше. Общий сигнал времени может быть выработан при помощи тактирующего контроллера, объединенного с "главным" силовым преобразователем.
Общий сигнал времени может иметь фиксированный период. Например, общий сигнал времени может быть получен от глобальной навигационной спутниковой системы (GNSS) в виде импульса сигнала времени 1 секунда, создаваемого глобальной (спутниковой) системой местоопределения (GPS). Если сетевой мост каждого силового преобразователя имеет номинальную частоту переключения 2.5 кГц, то тогда это будет эквивалентно 2500 периодам ШИМ в течение импульса сигнала времени 1 секунда. Период общего сигнала времени также может быть равен номинальному периоду переключения ШИМ. Если сетевой мост каждого силового преобразователя имеет номинальный период переключения 400 мкс, то тогда общий сигнал времени может иметь длительность 400 мкс, в течение которой протекает 1 период ШИМ.
В том случае когда питающая электрическая сеть представляет собой (обычную) электрическую сеть, тогда период общего сигнала времени может быть связан с номинально фиксированной частотой питающей электрической сети или может быть производным от нее. Если частота изменяется между верхним и нижним предельными значениями в результате дисбалансов мощности во всей сети (если мощность в нагрузке превышает генерируемую мощность, тогда частота падает, и наоборот), то тогда общий сигнал времени может быть отрегулирован, чтобы отслеживать эти изменения частоты. В заявке на патент Великобритании 0617371.0 на имя заявителя настоящего изобретения описан способ управления силовым преобразователем, который может быть использован для сопряжения с питающей электрической сетью, работающей с изменяющейся во времени частотой. Силовой преобразователь содержит сетевой мост, работающий в соответствии с ШИМ, имеющей частоту переключения, номинальную частоту переключения и число импульсов на период. Частоту переключения ШИМ изменяют в соответствии с изменяющейся во времени частотой питающей электрической сети, так чтобы преимущественно получать только целые гармоники (и преимущественно только целые нечетные гармоники) изменяющейся во времени частоты. Поэтому общий сигнал времени, который используют в данном способе, может иметь период, равный обратной величине частоты переключения (Fpwm) ШИМ, полученной по способу, описанному в заявке на патент Великобритании 0617371.0, причем 1 период ШИМ протекает в течение этого времени.
Период переключения ШИМ, которую подают на каждый сетевой мост, затем преимущественно устанавливают равным периоду общего сигнала времени. Этот способ позволяет задавать период переключения ШИМ каждого силового преобразователя дистанционно, с использованием общего сигнала времени, чтобы получить дополнительные преимущества.
Общий сигнал времени может быть передан на силовые преобразователи от автономного тактирующего контроллера или от "главного" силового преобразователя на "подчиненные" силовые преобразователи, при помощи любого подходящего средства. Например, общий сигнал времени может представлять собой сигнал беспроводной связи, например такой как сигнал радиочастоты (РЧ), или же электрический или оптический сигнал, который передают по электрическому кабелю или оптическому волокну. Может быть необходимо компенсировать задержки в аппаратных средствах, вызванные в первую очередь временем передачи общего сигнала времени на силовые преобразователи. Это особенно справедливо, если задержка составляет значительную долю периода переключения ШИМ. Компенсация может предусматривать использование дополнительного временного сдвига относительно периода переключения ШИМ сетевых мостов одного или нескольких силовых преобразователей. Более конкретно, период переключения ШИМ может иметь первый временной сдвиг относительно общего временного сигнала, чтобы главным образом обеспечивать подавление гармонических искажений напряжения, и второй временной сдвиг относительно общего временного сигнала, чтобы компенсировать задержки за счет времени передачи общего сигнала времени и задержки за счет передачи частоты ШИМ по сетевым кабелям, чтобы дополнительно оптимизировать подавление гармоник.
В соответствии со вторым вариантом настоящего изобретения предлагается способ, который включает в себя следующие операции: определение числа силовых преобразователей, подключенных к питающей электрической сети, определение периода переключения ШИМ сетевого моста первого силового преобразователя, передачу сигнала времени, имеющего период импульсов, равный периоду переключения ШИМ сетевого моста первого силового преобразователя на второй силовой преобразователь в качестве точки отсчета времени, измерение периода импульсов сигнала времени, установку периода переключения ШИМ сетевого моста второго силового преобразователя, равного измеренному периоду импульсов сигнала времени, и сдвиг периода переключения ШИМ сетевого моста второго силового преобразователя относительно сигнала времени на промежуток времени, который главным образом равен измеренному периоду импульсов сигнала времени, поделенному на число силовых преобразователей, подключенных к питающей электрической сети, так что по меньшей мере одна нежелательная гармоника в напряжении питающей электрической сети будет по меньшей мере частично подавлена.
Например, в самом распространенном случае, когда два силовых преобразователя подключены к питающей электрической сети, период переключения ШИМ сетевого моста второго силового преобразователя должен быть сдвинут на промежуток времени, который главным образом равен измеренному периоду импульсов первого сигнала времени, поделенному на два.
Любое число силовых преобразователей может быть подключено вместе в соответствии с описанным здесь выше, чтобы образовать каскадную (последовательную) матрицу. Следует иметь в виду, что термин "каскадный" относится к тому как сигналы времени проходят между силовыми преобразователями в матрице, при этом все силовые преобразователи в матрице остаются подключенными к питающей электрической сети в параллель. Каждый силовой преобразователь преимущественно передает сигнал времени, имеющий период импульсов, равный периоду переключения ШИМ связанного с ним сетевого моста. Каждый силовой преобразователь, который принимает сигнал времени, преимущественно измеряет период импульсов принятого сигнала времени, задает период переключения ШИМ своего сетевого моста так, чтобы он совпадал с измеренным периодом импульсов, и сдвигает период переключения ШИМ связанного с ним сетевого моста на промежуток времени, который главным образом равен измеренному периоду импульсов принятого сигнала времени, поделенному на число силовых преобразователей, подключенных к питающей электрической сети.
Для каскадной матрицы N силовых преобразователей способ может дополнительно предусматривать операцию передачи N-ного сигнала времени, имеющего период импульсов, равный периоду переключения ШИМ сетевого моста N-ного силового преобразователя, на первый силовой преобразователь. Другими словами, первый силовой преобразователь в матрице преимущественно получает сигнал времени от последнего силового преобразователя в матрице. Таким образом, матрица может быть матрицей "с замкнутым контуром".
Число силовых преобразователей N, которые подключены к питающей электрической сети, может быть определено как число силовых преобразователей, которые физически подключены к питающей электрической сети вне зависимости от их рабочего состояния. В этом случае N будет главным образом фиксированным и будет определяться, например, конструктивным построением ветровой электростанции, морской силовой установки или вольт-амперного реактивного (VAR) компенсатора. Для подавления гармоник считают, что число силовых преобразователей N, которые подключены к питающей электрической сети, не будет изменяться, если по какой-либо причине происходит отключение от сети одного или нескольких силовых преобразователей. Это может приводить к менее эффективному подавлению по меньшей мере одной нежелательной гармоники в напряжении питающей электрической сети, но может быть более подходящим для некоторых применений.
Обычно является предпочтительным, чтобы число N силовых преобразователей, которые подключены к питающей электрической сети, определялось числом силовых преобразователей, которые физически подключены к питающей электрической сети и работают в любой данный момент времени. Другими словами, N является динамическим и изменяется в ответ на рабочее состояние силовых преобразователей в матрице. Это означает, что число N силовых преобразователей, которые подключены к питающей электрической сети, будет обновляться, чтобы обеспечивать более эффективное подавление по меньшей мере одной нежелательной гармоники в напряжении питающей электрической сети, причем каждый силовой преобразователь может передавать информацию о своем состоянии подключения или отключения. Информация о числе N силовых преобразователей, которые подключены к питающей электрической сети, в любой данный момент времени может быть передана на все силовые преобразователи, периодически или когда изменяется число подключенных к сети силовых преобразователей. Каждый силовой преобразователь преимущественно использует самое последнее обновленное или текущее значение N, когда определяет сдвиг периода переключения ШИМ связанного с ним сетевого моста.
Сигналы времени могут передаваться от одного силового преобразователя на другой при помощи любого подходящего средства. Например, сигналы времени могут быть сигналами беспроводной связи, например радиочастотными (РЧ) сигналами, или электрическими или оптическими сигналами, передаваемыми по электрическому кабелю или оптическому волокну.
Силовой преобразователь в матрице, который первым подключается к сети, преимущественно играет роль "главного" силового преобразователя и занимает положение первого силового преобразователя в матрице. В первый момент решение о присвоении роли "главного" силового преобразователя принимают на основании отсутствия любого сигнала времени, принятого силовым преобразователем. Любой силовой преобразователь, который принимает сигнал времени, когда его подключают к сети, преимущественно будет выполнять роль "подчиненного" силового преобразователя. Любой "подчиненный" силовой преобразователь, который не получает сигнал времени по какой-либо причине (например, если непосредственно предшествующий ему силовой преобразователь в матрице отключается или если сигнал времени прерывается) может получать роль "главного" силового преобразователя.
Матрица, самое малое, может иметь два или несколько "главных" силовых преобразователей, в зависимости от порядка, в котором происходит подключение силовых преобразователей. Матрица также может иметь два или несколько "главных" силовых преобразователей, если один или несколько силовых преобразователей отключаются от сети. В этом случае матрицу эффективно подразделяют на группы подматриц, причем каждый "главный" силовой преобразователь занимает положение первого силового преобразователя в объединенной с ним подматрице. Когда все силовые преобразователи в матрице подключены и работают надлежащим образом, тогда преимущественно будет только один "главный" силовой преобразователь. Этот "главный" силовой преобразователь преимущественно занимает положение первого силового преобразователя в матрице, а остальные силовые преобразователи преимущественно будут выполнять роль "подчиненных" силовых преобразователей и будут занимать соответствующее положение в матрице.
Сигналы времени, которые передают между смежными силовыми преобразователями в матрице, могут содержать информацию относительно роли ("главный" или "подчиненный") и/или положения в матрице силового преобразователя, который передает сигнал времени. Несмотря на то, что сигналы времени обычно имеют один и тот же период импульсов, они могут иметь различную длительность импульсов, несущую информацию о положении силового преобразователя в матрице. Это может быть полезно в том случае, когда один из силовых преобразователей в матрице отключается или выходит из строя. Когда все силовые преобразователи в матрице подключены и работают нормально, тогда длительность импульса N-ного сигнала времени, который принимает первый силовой преобразователь в матрице, может быть использована для подтверждения его роли как только "главного" силового преобразователя в матрице. Любой силовой преобразователь, который играет роль "главного" силового преобразователя, но получает сигнал времени, имеющий длительность импульса, которая отличается от той, которая обычно подтверждает роль "главного" силового преобразователя, может получать роль "подчиненного" силового преобразователя и может занимать соответствующее положение в матрице.
Например, в каскадной матрице, имеющей три силовых преобразователя, где первый силовой преобразователь в матрице получает сигнал времени от последнего силового преобразователя в матрице, каждый силовой преобразователь может:
(a) определять период импульсов для ШИМ (с использованием подходящего способа, такого как описанный далее более подробно), и если он является "главным" силовым преобразователем, то (i) занимать положение в матрице как первый силовой преобразователь, (ii) подавать ШИМ, имеющий заданный период импульсов, на объединенный с ним сетевой мост, и (iii) передавать сигнал времени, имеющий период импульсов, равный заданному периоду импульсов, и длительность импульса 20 мкс; и
(b) если он является "подчиненным" силовым преобразователем, то (i) измерять период импульсов принятого сигнала времени, (ii) подавать ШИМ, имеющий измеренный период импульсов, на объединенный с ним сетевой мост, и (iii) передавать сигнал времени, имеющий длительность импульса, равную длительности импульса принятого сигнала времени плюс 20 мкс.
Это означает, что первый "подчиненный" силовой преобразователь, который получает сигнал времени от "главного" силового преобразователя, будет передавать сигнал времени с длительностью импульса 40 мкс, а второй "подчиненный" силовой преобразователь, который получает сигнал времени от первого "подчиненного" силового преобразователя, будет передавать сигнал времени с длительностью импульса 60 мкс. Следует иметь в виду, что возможны и другие длительности импульсов.
Каждый силовой преобразователь также может быть конфигурирован так, чтобы оставаться "главным" силовым преобразователем, если он не получает сигнала времени или если полученный им сигнал времени имеет длительность импульса 60 мкс, но переключается от роли "главного" силового преобразователя на роль "подчиненного" силового преобразователя, если он получает сигнал времени, имеющий длительность импульса 20 мкс или 40 мкс.
Если имеются три каскадных силовых преобразователя, которые удобно назвать преобразователями А, В и С, которые передают сигналы времени в последовательности А→В, В→С и С→А, то тогда могут быть использованы следующие примеры для пояснения их работы в различных обстоятельствах. Сигналы времени можно рассматривать как последовательности цифровых временных импульсов, имеющих состояние 0 и 1, причем период импульсов можно определить как промежуток времени между фронтами нарастания и спада последовательных временных импульсов, а длительность импульса можно определить как промежуток времени в течение единичного состояния. В приведенных далее примерах предполагают, что всегда N=3.
1. Силовой преобразователь А представляет собой первый подключаемый преобразователь, причем он получает роль "главного" силового преобразователя и занимает первое положение в матрице. Он выдает сигнал времени, который имеет длительность импульса 20 мкс и период импульсов, равный периоду переключения ШИМ его сетевого моста (причем этот период переключения, например, может быть основан на местном определении или передан от автономного контроллера). Задний фронт (спад) сигнала времени с выхода силового преобразователя А совпадает с началом периода переключения ШИМ его сетевого моста. Силовой преобразователь В является следующим при подключении к сети. Он получает сигнал времени от силового преобразователя А, имеющий длительность импульса 20 мкс. Он играет роль "подчиненного" силового преобразователя, так как он получает сигнал времени и занимает второе положение в матрице. Он измеряет период импульсов принятого сигнала времени, задает период переключения ШИМ своего сетевого моста так, что он совпадает с измеренным периодом импульсов, и вводит временной сдвиг, который равен измеренному периоду импульсов, поделенному на три. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста силового преобразователя В. Силовой преобразователь В выдает сигнал времени, имеющий длительность импульса, равную длительности импульса принятого сигнала времени плюс 20 мкс (то есть длительность импульса 40 мкс), и период импульсов, равный периоду переключения ШИМ своего сетевого моста. Задний фронт (спад) сигнала времени с выхода силового преобразователя В совпадает с началом периода переключения ШИМ его сетевого моста. Силовой преобразователь С последним подключают к сети. Он получает сигнал времени от силового преобразователя В, имеющий длительность импульса 40 мкс. Он играет роль "подчиненного" силового преобразователя, так как он получает сигнал времени, и занимает третье положение в матрице. Он измеряет период импульсов принятого сигнала времени, задает период переключения ШИМ своего сетевого моста так, что он совпадает с измеренным периодом импульсов, и вводит временной сдвиг, который равен измеренному периоду импульсов, поделенному на три. Этот временной сдвиг используют для определения начала периода переключения ШИМ его сетевого моста. Силовой преобразователь С выдает сигнал времени, имеющий длительность импульса, равную длительности импульса принятого сигнала времени плюс 20 мкс (то есть длительность 60 мкс), и период импульсов, равный периоду переключения ШИМ своего сетевого моста. Задний фронт (спад) сигнала времени с выхода силового преобразователя С совпадает с началом периода переключения ШИМ его сетевого моста. Силовой преобразователь А получает сигнал времени от силового преобразователя С, имеющий длительность импульса 60 мкс, который подтверждает его роль "главного" силового преобразователя, причем его работа остается неизменной.
2. Матрица функционирует нормально до тех пор, пока силовой преобразователь А не отключается от сети или не прерывается его сигнал времени. Силовой преобразователь В тогда больше не получает сигнал времени и теперь играет роль "главного" силового преобразователя и занимает первое положение в матрице. Он использует местное определение периода переключения ШИМ своего сетевого моста и выдает сигнал времени, имеющий длительность импульса 20 мкс и период импульсов, равный периоду переключения ШИМ своего сетевого моста. Задний фронт (спад) сигнала времени с выхода силового преобразователя В совпадает с началом периода переключения ШИМ его сетевого моста. Силовой преобразователь С получает сигнал времени от силового преобразователя В, имеющий длительность импульса 20 мкс. Он продолжает играть роль "подчиненного" силового преобразователя, так как он получает сигнал времени, но занимает второе положение в матрице. Он измеряет период импульсов принятого сигнала времени, задает период переключения ШИМ своего сетевого моста так, что он совпадает с измеренным периодом импульсов, и вводит временной сдвиг, который равен измеренному периоду импульсов, поделенному на три. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста силового преобразователя С.Силовой преобразователь С выдает сигнал времени, имеющий длительность импульса, равную длительности импульса принятого сигнала времени плюс 20 мкс (то есть длительность импульса 40 мкс) и период импульсов, равный периоду переключения ШИМ его сетевого моста. Задний фронт (спад) сигнала времени с выхода силового преобразователя С совпадает с началом периода переключения ШИМ его сетевого моста. Когда силовой преобразователь А вновь подключается к сети, он получает сигнал времени от силового преобразователя С, имеющий длительность импульса 40 мкс. Он теперь играет роль "подчиненного" силового преобразователя, так как он получает сигнал времени и занимает третье положение в матрице. Он измеряет период импульсов принятого сигнала времени, задает период переключения ШИМ своего сетевого моста так, что он совпадает с измеренным периодом импульсов, и вводит временной сдвиг, который равен измеренному периоду импульсов, поделенному на три. Этот временной сдвиг используют для определения начала периода переключения ШИМ его сетевого моста. Силовой преобразователь А выдает сигнал времени, имеющий длительность импульса, равную длительности импульса принятого сигнала времени плюс 20 мкс (то есть длительность импульса 60 мкс), и период импульсов, равный периоду переключения ШИМ его сетевого моста. Задний фронт сигнала времени с выхода силового преобразователя А совпадает с началом периода переключения ШИМ его сетевого моста. Силовой преобразователь В получает сигнал времени от силового преобразователя А, имеющий длительность импульса 60 мкс, который подтверждает его роль "главного" силового преобразователя, при этом его работа остается неизменной.
3. Силовой преобразователь А является первым при подключении к сети, поэтому он теперь играет роль "главного" силового преобразователя и занимает первое положение в матрице. Он выдает сигнал времени, имеющий длительность импульса 20 мкс, и период импульсов, равный периоду переключения ШИМ своего сетевого моста (причем этот период переключения, например, может быть основан на местном определении или передан от автономного контроллера). Задний фронт сигнала времени с выхода силового преобразователя А совпадает с началом периода переключения ШИМ его сетевого моста. Силовой преобразователь С является следующим при подключении к сети и также играет роль "главного" силового преобразователя и занимает первое положение в матрице. Он использует местное определение периода переключения ШИМ своего сетевого моста и выдает сигнал времени, имеющий длительность импульса 20 мкс и период импульсов, равный периоду переключения ШИМ своего сетевого моста. Задний фронт сигнала времени с выхода силового преобразователя С совпадает с началом периода переключения ШИМ его сетевого моста. Силовой преобразователь А теперь получает сигнал времени от силового преобразователя С, имеющий длительность импульса 20 мкс. Поэтому он переключается от своей роли "главного" силового преобразователя к роли "подчиненного" силового преобразователя и занимает второе положение в матрице. Он измеряет период импульсов принятого сигнала времени, задает период переключения ШИМ своего сетевого моста так, что он совпадает с измеренным периодом импульсов, и вводит временной сдвиг, который равен измеренному периоду импульсов, поделенному на три. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста силового преобразователя А. Силовой преобразователь А выдает сигнал времени, имеющий длительность импульса, равную длительности импульса принятого сигнала времени плюс 20 мкс (то есть длительность импульса 40 мкс), и период импульсов, равный периоду переключения ШИМ своего сетевого моста. Задний фронт сигнала времени с выхода силового преобразователя А совпадает с началом периода переключения ШИМ его сетевого моста. Когда силовой преобразователь В подключается к сети, он получает сигнал времени от силового преобразователя А, имеющий длительность импульса 40 мкс. Он играет роль "подчиненного" силового преобразователя, так как он получает сигнал времени, и занимает третье положение в матрице. Он измеряет период импульсов принятого сигнала времени, задает период переключения ШИМ своего сетевого моста так, что он совпадает с измеренным периодом импульсов, и вводит временной сдвиг, который равен измеренному периоду импульсов, поделенному на три. Этот временной сдвиг используют для определения начала периода переключения ШИМ его сетевого моста. Силовой преобразователь В выдает сигнал времени, имеющий длительность импульса, равную длительности импульса принятого сигнала времени плюс 20 мкс (то есть длительность импульса 60 мкс), и период импульсов, равный периоду переключения ШИМ своего сетевого моста. Задний фронт сигнала времени с выхода силового преобразователя В совпадает с началом периода переключения ШИМ его сетевого моста. Силовой преобразователь С получает сигнал времени от силового преобразователя В, имеющий длительность импульса 60 мкс, который подтверждает его роль "главного" силового преобразователя, при этом его работа остается неизменной.
Таким образом, силовые преобразователи в матрице могут подключаться к сети случайным образом и могут автоматически контролировать ситуации, в которых силовой преобразователь отключается от сети. Специалисты легко поймут, что несмотря на то, что в приведенных здесь выше примерах всегда N=3, возможно изменение N, когда силовые преобразователи отключаются от сети и вновь подключаются к сети. Например, в ситуации, когда силовой преобразователь А отключается от сети (то есть когда N=2), тогда силовые преобразователи В и С создают временной сдвиг, равный соответствующему измеренному периоду импульсов, поделенному на два.
Период переключения ШИМ сетевого моста "главного" силового преобразователя (и, следовательно, период импульсов сигналов времени) может быть фиксированным. Например, период импульсов может составлять 400 мкс, если номинальная частота переключения сетевого моста равна 2.5 кГц. В этом случае все силовые преобразователи в матрице могут независимо определять период переключения ШИМ для своих сетевых мостов, если они получают роль "главного" силового преобразователя. Когда силовой преобразователь получает роль "подчиненного" силового преобразователя, тогда период переключения ШИМ его сетевого моста определяют при помощи измеренного периода импульсов принятого временного импульса. Следовательно, период переключения ШИМ для всех силовых преобразователей в матрице (или в подматрице) преимущественно определяют исключительно при помощи действующего "главного" силового преобразователя.
Другими словами, несмотря на то, что некоторые операции управления преимущественно осуществляются всеми силовыми преобразователями независимо, так как все они могут иметь одинаковое микропрограммное обеспечение, эти операции управления могут эффективно блокироваться, когда соответствующий силовой преобразователь получает роль "подчиненного" силового преобразователя. Например, в том случае когда питающая электрическая сеть представляет собой (обычную) электрическую сеть, каждый силовой преобразователь может производить независимое определение периода переключения ШИМ, с использованием способа, описанного в заявке 0617371.0 на патент Великобритании, как уже было указано здесь выше. Однако только "главный" силовой преобразователь будет использовать это определение, когда он задает период переключения ШИМ для своего сетевого моста и передает его на "подчиненные" силовые преобразователи через сигналы времени. Каждый "подчиненный" силовой преобразователь игнорирует свое собственное определение и задает период переключения ШИМ для связанного с ним сетевого моста с использованием периода импульсов принятого сигнала времени.
В соответствии с настоящим изобретением предлагаются также множество силовых преобразователей, которые могут быть использованы для сопряжения с питающей электрической сетью, причем каждый силовой преобразователь содержит сетевой мост, работающий в соответствии с широтно-импульсной модуляцией (ШИМ), имеющей одинаковый для всех преобразователей период переключения, которая создает по меньшей мере одну нежелательную гармонику в напряжении питающей электрической сети, и контроллер, причем контроллеры создают период переключения ШИМ каждого сетевого моста с различным временным сдвигом относительно точки отсчета времени, так что по меньшей мере одна нежелательная гармоника в напряжении питающей электрической сети будет по меньшей мере частично подавлена.
В соответствии с первым вариантом настоящего изобретения, общий сигнал времени может быть подан на каждый силовой преобразователь в качестве точки отсчета времени, причем контроллеры позволяют создавать период переключения ШИМ каждого сетевого моста с различным временным сдвигом относительно общего временного сигнала, так что по меньшей мере одна нежелательная гармоника в напряжение питающей электрической сети будет по меньшей мере частично подавлена.
В соответствии с первым вариантом настоящего изобретения, сигнал времени, имеющий период импульсов, равный периоду переключения ШИМ сетевого моста первого силового преобразователя, может быть передан на второй силовой преобразователь в качестве точки отсчета времени. Контроллер второго силового преобразователя позволяет измерять период импульсов сигнала времени, задавать период переключения ШИМ сетевого моста второго силового преобразователя равным измеренному периоду импульсов сигнала времени, и смещать период переключения ШИМ сетевого моста второго силового преобразователя относительно сигнала времени на промежуток времени, который главным образом равен измеренному периоду импульсов сигнала времени, поделенному на число силовых преобразователей, подключенных к питающей электрической сети, так что по меньшей мере одна нежелательная гармоника в напряжение питающей электрической сети будет по меньшей мере частично подавлена.
Силовые преобразователи могут быть использованы для применений с использованием двигателей и генераторов. Например, силовые преобразователи могут быть использованы для сопряжения генератора с питающей электрической сетью или с электрической сетью. В этом случае сетевой мост будет нормально работать как активный инвертор. Силовой преобразователь также может быть использован для сопряжения двигателя с питающей электрической сетью (с шиной переменного тока). В этом случае сетевой мост будет нормально работать как активный выпрямитель. Каждый силовой преобразователь может работать как статический вольт-амперный реактивный (VAR) компенсатор.
Краткое описание чертежей
На фиг.1 схематично показано как множество силовых преобразователей в соответствии с настоящим изобретением могут быть использованы для сопряжения между ветротурбинами, приводящими в движение генератор переменной скорости, и электрическая сетью.
На фиг.2 схематично показаны общий сигнал времени, который подают на каждый из силовых преобразователей, показанных на фиг.1, и широтно-импульсная модуляция (ШИМ) сетевого моста каждого силового преобразователя, показанного на фиг.1.
На фиг.3 схематично показано как ШИМ сетевого моста каждого силового преобразователя, показанного на фиг.1, смещена относительно общего временного сигнала, показанного на фиг.2.
На фиг.4 схематично показано как множество силовых преобразователей в соответствии с настоящим изобретением могут быть использованы в применениях морской силовой установки для сопряжения между приводами двигателя переменной скорости и шиной переменного тока.
На фиг.5 схематично показано как множество силовых преобразователей в соответствии с настоящим изобретением могут быть использованы в применениях статического вольт-амперного (VAR) компенсатора (SVC).
На фиг.6 схематично показано как контроллеры сетевых мостов множества силовых преобразователей, показанных на фиг.1, могут быть объединены вместе в альтернативную схему соединения, чтобы образовать каскадную матрицу.
На фиг.7 схематично показана каскадная матрица в соответствии с фиг.6 в первом рабочем режиме.
На фиг.8 схематично показаны сигналы времени, передаваемые при помощи контроллеров в каскадную матрицу в соответствии с фиг.6 в первом рабочем режиме.
На фиг.9 схематично показана каскадная матрица в соответствии с фиг.6 во втором рабочем режиме.
На фиг.10 схематично показана каскадная матрица в соответствии с фиг.6 в третьем рабочем режиме.
На фиг.11 схематично показана каскадная матрица в соответствии с фиг.6 в четвертом рабочем режиме.
На фиг.12 показан график действующего напряжения в функции порядка гармоники для трех параллельно включенных силовых преобразователей, когда ШИМ сетевых мостов имеют нулевые временные сдвиги.
На фиг.13 показан график действующего напряжения в функции порядка гармоники для трех параллельно включенных силовых преобразователей, когда ШИМ сетевых мостов имеют временные сдвиги 0%, 33.3% и 66.6% периода переключения, соответственно.
На фиг.14 показан график действующего напряжения в функции порядка гармоники для трех параллельно включенных силовых преобразователей, когда ШИМ сетевых мостов имеют временные сдвиги 0%, 38.5% и 72.5% периода переключения, соответственно.
Общий сигнал времени
Далее сначала будет описана со ссылкой на фиг.1 базовая топология силового преобразователя для приложений ветротурбин, с использованием общего сигнала времени.
В показанной на фиг.1 базовой топологии три включенных параллельно силовых преобразователя 1a, 1b и 1 с использованы для сопряжения между ветротурбинами 2, каждая из которых приводит в движение асинхронный генератор 4 переменной скорости и переменного тока, и общей питающей электрической сетью (названной HV NETWORK). Каждая ветротурбина типично содержит три турбинные лопасти (хотя также возможно и другое число турбинных лопастей), установленные на вращающемся валу, углом наклона которых можно управлять при помощи средства изменения угла наклона, чтобы оптимизировать и/или ограничивать ввод энергии ветра в генератор 4. Редукторы 8 используют для соединения вращающегося вала с ротором каждого генератора 4 переменной скорости. В некоторых случаях вращающийся вал может быть подключен непосредственно к ротору генератора переменной скорости.
Специалисты легко поймут, что асинхронный генератор 4 может быть заменен генератором другого типа, например генератором с постоянным магнитом. Комбинация асинхронного генератора 4 и редуктора 8 может быть заменена генератором с постоянным магнитом, имеющим прямой привод.
Клеммы переменного тока каждого генератора 4 подключены к клеммам переменного тока трехфазного моста 10 генератора, который при нормальной работе действует как активный выпрямитель и подает питание на линию 12 постоянного тока. Каждый мост 10 генератора имеет обычную трехфазную двухуровневую топологию с группами полупроводниковых силовых переключающих приборов, которые имеют полное управление и регулировку с использованием ШИМ. Однако на практике мосты 10 генератора могут иметь любую подходящую топологию, например такую как трехуровневая топология с фиксированной нейтральной точкой или многоуровневая топология, например топология Foch-Maynard).
Выходное напряжение постоянного тока каждого моста 10 генератора поступает на клеммы постоянного тока сетевого моста 14, который при нормальной работе действует как инвертор. Сетевые мосты 14 имеют трехфазную двухуровневую топологию, аналогичную топологии мостов 10 генератора, с группами полупроводниковых силовых переключающих приборов, которые имеют полное управление и регулировку с использованием ШИМ. Однако на практике сетевые мосты 14 могут иметь любую подходящую топологию, как уже было указано здесь выше для мостов 10 генератора. Подходящим сетевым мостом 14 является инвертор ALSPA MV3000, который может быть закуплен на фирме Converteam Ltd of Boughton Road, Rugby, Warwickshire, CV21 1BU, Великобритания.
Выходное напряжение переменного тока каждого сетевого моста 14 содержит компоненты напряжения на основной частоте и различные нежелательные гармоники, связанные с частотой биений между основной частотой и номинальной частотой переключения ШИМ. Выходное напряжение переменного тока каждого сетевого моста 14 фильтруют при помощи фильтра 16. Отфильтрованное выходное напряжение переменного тока каждого сетевого моста 14 затем подают в питающую электрическую сеть через повышающий трансформатор 6. Защитное распределительное устройство (не показано) может быть предусмотрено для обеспечения надежной связи с питающей электрической сетью и для изоляции генератора и систем преобразователя от питающей электрической сети, в соответствии с различными эксплуатационными и неэксплуатационными требованиями. Шунтирующие фильтры (не показаны) также могут быть использованы между соответствующими фильтрами 16 и повышающими трансформаторами 6. Такими шунтирующими фильтрами могут быть простые емкостные фильтры или резонансные фильтры, предназначенные для ослабления специфических гармоник частоты переключения.
Каждый силовой преобразователь содержит контроллер 18 (который на практике может быть выполнен как деталь сетевого моста 14), который управляет ШИМ сетевого моста и получает общий сигнал времени через электрический кабель от автономного тактирующего контроллера 22. Общий сигнал времени представляет собой как минимум одиночный импульс, известный как период повторения импульсов. В последующем описании используют одиночный импульс, имеющий минимальный маркер 50 мс и максимальный маркер 950 мс, период 1 секунда и известную точность, который подают на каждый контроллер 18, причем "маркер" представляет собой, например, часть общего сигнала времени в состоянии логической единицы. Номинальная частота переключения ШИМ каждого сетевого моста 14 составляет 2.5 кГц, так что каждый сетевой мост работает с одним и тем же номинальным периодом переключения 400 мкс.
Фактическая частота переключения ШИМ каждого сетевого моста 14 также может изменяться в соответствии с изменяющейся во времени частотой питающей электрической сети, чтобы получать только целые гармоники (и преимущественно только целые нечетные гармоники) изменяющейся во времени частоты. В этом случае общий сигнал времени, поступающий на каждый контроллер 18, может быть одиночным импульсом, имеющим период, равный обратной величине частоты (Fpwm) переключения ШИМ, который получен в соответствии со способом, предложенным в заявке на патент Великобритании 0617371.0 на имя заявителя настоящего изобретения, причем один период ШИМ осуществляют при поступлении каждого импульса. Это описано далее более подробно.
Период переключения ШИМ для каждого сетевого моста 14 часто начинают по переднему (нарастающему) фронту импульса общего сигнала времени. Однако период переключения ШИМ для каждого сетевого моста 14 может также начинаться с заданным временным сдвигом от общего сигнала времени, так что период переключения ШИМ начинается в заданный момент времени после переднего фронта общего сигнала времени. В том и другом случае передний фронт каждого импульса общего сигнала времени служит точкой отсчета времени.
Общий сигнал времени, поступающий на каждый контроллер 18, схематично показан на фиг.2, вместе с ШИМ для сетевого моста 14. Следует иметь в виду, что вертикальные отметки на фиг.2 отображают начало и конец пакета, содержащего индивидуальные импульсы в одном периоде ШИМ, что сделано для упрощения понимания. ШИМ может быть реализована с использованием любой подходящей техники.
Для общего сигнала времени, имеющего фиксированный период, минимальной информацией, необходимой для того, чтобы данный контроллер 18 мог осуществлять соответствующее управление ШИМ объединенного с ним сетевого моста 14, является номинальная длительность одного периода общего сигнала времени, номинальная частота переключения ШИМ и временной сдвиг относительно общего временного сигнала, приложенного к ШИМ. В случае базовой топологии с тремя параллельно включенными силовыми преобразователями 1a, 1b и 1с, показанной на фиг.1, сетевой мост 14, объединенный с первым силовым преобразователем 1а, может работать с временным сдвигом 0% периода переключения ШИМ. Сетевой мост 14, объединенный со вторым силовым преобразователем 1b, может работать с временным сдвигом 33.3% периода переключения ШИМ. Сетевой мост 14, объединенный с третьим силовым преобразователем 1с, может работать с временным сдвигом 66.6% периода переключения ШИМ. В той ситуации когда номинальный период переключения ШИМ равен 400 мкс, временной сдвиг для второго и третьего силовых преобразователей 1b и 1с составляет соответственно 133 мкс и 266 мкс (такие временные сдвиги 133 мкс и 266 мкс представляют собой округленные числа, соответствующие 33.3% и 66.6% номинального периода 400 мкс ШИМ. Если необходимо принимать во внимание остатки, тогда их учитывают при специфической реализации настоящего изобретения).
Если 360° представляет собой эквивалент номинального периода переключения, составляющего 400 мкс, тогда временные сдвиги, которые отображают сдвиги фаз для первого, второго и третьего силовых преобразователей, будут равны 0°, 120° и 240°, соответственно.
На фиг.3 показано как ШИМ трех сетевых мостов 14 могут работать с временным сдвигом относительно общего сигнала времени, действующего как точка отсчета времени. Более конкретно, на фиг.3 показано, что ШИМ для сетевого моста 14 первого силового преобразователя 1а начинается возможно ближе к началу каждого импульса общего сигнала времени (то есть имеет временной сдвиг 0% периода переключения ШИМ). ШИМ для сетевого моста 14 второго силового преобразователя 1b начинается со сдвигом 133 мкс после каждого импульса общего сигнала времени (то есть имеет временной сдвиг 33.3% периода переключения ШИМ). Наконец, ШИМ для сетевого моста 14 третьего силового преобразователя 1с начинается со сдвигом 266 мкс после каждого импульса общего сигнала времени (то есть имеет временной сдвиг 66.6% периода переключения ШИМ).
Специалисты легко поймут, что аналогичные временные сдвиги могут быть определены для любого числа параллельно включенных силовых преобразователей.
Автономный тактирующий контроллер 22 может быть исключен, если общий сигнал времени вырабатывается при помощи одного из контроллеров 18. Так называемый главный контроллер 18 (то есть контроллер, объединенный с "главным" силовым преобразователем) вырабатывает общий сигнал времени и передает его на другие "подчиненные" контроллеры. Например, в базовой топологии на фиг.1с тремя параллельно включенными силовыми преобразователями 1а, 1b и 1с "главный" контроллер 18 первого силового преобразователя 1а может подавать общий сигнал времени на "подчиненные" контроллеры второго и третьего силовых преобразователей 1b и 1с. Для обеспечения рабочей гибкости, например, в случае когда контроллер 18 первого силового преобразователя 1а отключают от сети для проведения обслуживания или в случае его отказа, может быть полезно, чтобы роль "главного" контроллера также могли играть контроллеры второго и третьего силовых преобразователей 1b и 1с. Конфигурация может быть затем динамично изменена для этой ситуации, причем нормальная работа (в том числе при эффективном подавлении гармоник) может быть продолжена с оставшимися силовыми преобразователями, подключенными к сети.
Для обеспечения наилучшего возможного подавления нежелательного гармонического искажения в питающей электрической сети временной сдвиг ШИМ каждого сетевого моста 14 преимущественно определяют в зависимости от числа силовых преобразователей, которые работают и подключены к питающей электрической сети в любой данный момент времени. Каждый контроллер 18 передает информацию о состоянии подключения объединенного с ним силового преобразователя (то есть о том, что он подключен к питающей электрической сети и работает нормально или отключен по какой-либо причине). Информацию о числе силовых преобразователей, подключенных к питающей электрической сети в любой данный момент времени, передают на все контроллеры 18, периодически или когда изменяется число подключенных к сети силовых преобразователей. Автономный контроллер 24 получает информацию о состоянии от каждого из контроллеров 18 и передает информацию о подключении к сети на каждый из контроллеров, как это показано на фиг.1. Несмотря на то, что это и не показано, следует иметь в виду, что силовые преобразователи 1a, 1b и 1с могут иметь такую конфигурацию, что информация о состоянии и информация о подключении к сети может быть принята и передана при помощи одного из контроллеров 18, например такого как "главный" контроллер. Информацию о подключении к сети используют в каждом из контроллеров 18 для того, чтобы определить соответствующий временной сдвиг для ШИМ объединенного с ним сетевого моста 14 следующим образом:
Time_Offset=(р-1)*(100%/N),
где р представляет собой номер соответствующего контроллера (то есть 1 - для контроллера первого силового преобразователя 1а, 2 - для контроллера второго силового преобразователя 1b, 3 - для контроллера третьего силового преобразователя 1с и т.д.); а N представляет собой число силовых преобразователей, которые подключены к питающей электрической сети в любой данный момент времени, что соответствует информации о подключении.
Например, если число силовых преобразователей, которые подключены к питающей электрической сети, возрастает от трех до четырех за счет подключения к сети ранее отключенного силового преобразователя, тогда временные сдвиги регулируют соответствующим образом. Например, ШИМ для сетевого моста 14 первого силового преобразователя 1а будет по-прежнему начинаться возможно ближе к началу каждого импульса общего сигнала времени (то есть будет иметь временной сдвиг 0% периода переключения ШИМ). ШИМ для сетевого моста 14 второго силового преобразователя 1b будет начинаться со сдвигом 100 мкс после каждого импульса общего сигнала времени (то есть будет иметь временной сдвиг 25% периода переключения ШИМ). ШИМ для сетевого моста 14 третьего силового преобразователя 1с будет начинаться со сдвигом 200 мкс после каждого импульса общего сигнала времени, то есть будет иметь временной сдвиг 50% периода переключения ШИМ). Наконец, ШИМ для сетевого моста 14 четвертого силового преобразователя (не показан) будет начинаться со сдвигом 300 мкс после каждого импульса общего сигнала времени (то есть будет иметь временной сдвиг 75% периода переключения ШИМ). Регулирование соответствующих временных сдвигов преимущественно осуществляют постепенно, так что нормальная ШИМ каждого сетевого моста не нарушается чрезмерно в момент изменения конфигурации. Например, временной сдвиг для сетевого моста второго силового преобразователя 1b может быть постепенно снижен от 133 мкс до 100 мкс в ходе нескольких периодов переключения ШИМ.
Сетевой мост 14 любого конкретного силового преобразователя может быть синхронизирован с общим сигналом времени при помощи объединенного с ним контроллера 18 следующим образом.
Без синхронизации ШИМ сетевого моста 14 будет работать на номинальной частоте переключения (Fpwm) 2.5 кГц (то есть с номинальным периодом переключения 400 мкс), что определяет независимо каждый контроллер 18. Период переключения имеет временное разрешение 200 нс. Возможны и другие частоты переключения и временные разрешения, что обычно зависит от рабочих характеристик сетевого моста 14. Важно отметить, что так как каждый индивидуальный контроллер 18 измеряет общий сигнал времени в соответствии с его собственной внутренней синхронизацией и моменты переключения специфической ШИМ для каждого контроллера определяют в соответствии с его собственной внутренней синхронизацией, ошибки частоты синхронизации между контроллерами автоматически подавляются и качество подавления гармоник не ухудшается.
Контроллер 18 содержит таймер ШИМ, который работает в диапазоне от 0 до 2000 (что составляет 2000 раз по 200 нсек или всего 400 мкс при нормальных условиях), до автоматического сброса. Таймер ШИМ представляет собой таймер, в соответствии с которым синхронизируют все параметры ШИМ.
Когда контроллер 18 получает импульс общего сигнала времени, производят его привязку к таймеру ШИМ и полученное значение называют как Actual_Pulse_Arrival_Time (фактическое время поступления импульса).
Контроллер 18 также содержит таймер промежутка времени, который измеряет промежуток времени между следующими один за другим импульсами общего сигнала времени (номинально с промежутками 1 секунда). Значение измеренного промежутка времени называют как Last One Second Period (период одной последней секунды). Значения Actual_Pulse_Arrival_Time и Last_One_Second_Period измеряют с одним и тем же временным разрешением.
После того как второй импульс общего сигнала времени был получен контроллером 18, определяют разность между фактическим временем приема второго импульса (которое соответствует значению Actual_Pulse_Arrival_Time) и ожидаемым временем приема второго импульса (которое соответствует значению Intended_Pulse_Arrival_Time), и результат называют как Phase_Error (фазовая ошибка). Следовательно, при нормальной работе, когда каждый следующий импульс общего сигнала времени приходит в заданный момент времени приема, фазовая ошибка должна быть равна нулю.
Далее описано вычисление Intended_Pulse_Arrival_Time (ожидаемого времени приема импульса).
Фактический период переключения ШИМ для сетевого моста 14 в следующем периоде, номинально составляющем 1 секунду между последовательными импульсами общего сигнала времени, может быть вычислен следующим образом:
Switchmg_Period=(Last_One_Second_Period+Phase_Error)/Fpwm.
Это вычисление проводят в периоде переключения, следующем за приемом импульса общего сигнала времени (то есть номинально каждую 1 секунду в этом примере).
Для получения необходимого сдвига фазы между сетевыми мостами 14 первого, второго и третьего силовых преобразователей 1a, 1b и 1с, Intended_Pulse_Arrival_Time изменяют на временной сдвиг, который вычисляют следующим образом:
Intended_Pulse_Arrival_Time=(Time_Offset*Switching_Period)+Delay_Comp
где Time_Offset представляет собой значение в диапазоне от 0 до 100%, которое в данном примере равно 0% для сетевого моста 14 первого силового преобразователя 1а, 33.3% для сетевого моста второго силового преобразователя 1b и 66.6% для сетевого моста третьего силового преобразователя 1с.
Delay_Comp (компенсация задержки) представляет собой регулировку времени, при помощи которой ШИМ контроллера 18 сдвигают вперед или назад, чтобы компенсировать задержки при передаче общего сигнала времени.
В ситуации, когда питающая электрическая сеть имеет изменяющуюся во времени частоту (Fnet), возможно производить изменение фактической частоты переключения (Fpwm) ШИМ, поступающей на сетевые мосты 14, с использованием способа, предложенного в заявке на патент Великобритании 0617371.0, чтобы получать только целые гармоники (а преимущественно только целые нечетные гармоники) частоты Fnet. Период общего сигнала времени может затем быть установлен равным обратной величине Fpwm, причем 1 период ШИМ сетевых мостов протекает в течение одного импульса сигнала времени.
Термин "целые гармоники" включает в себя как гармоники, которые точно имеют целые значения, так и гармоники, которые имеют допустимое отклонение от целых значений. Допустимое отклонение (например, типично в диапазоне ±5 Гц) обычно задает или определяет оператор питающей электрической сети, или же оно задано стандартом.
Далее приведен возможный алгоритм, позволяющий определять число импульсов на период ШИМ (Pulse_Number) для преобладающей частоты Fnet, однако одновременно с соблюдением максимальной частоты переключения ШИМ (Fpwm_nom) и с использованием окна гистерезиса:
Pulse_Number_hi=
Pulse_Number_lo=
где ROUND представляет собой математическую функцию, которая преобразует результат выражения в скобках в ближайшее число, a HYSTERESIS представляет собой величину гистерезиса частоты Fnet в окрестности изменений Pulse_Number, причем в дальнейшем описании эта величина принята равной 0.25 Гц. Возможны и другие значения гистерезиса.
Алгоритм позволяет получить два значения для Pulse Number (а именно Pulse_Number_hi и Pulse_Number_lo), поэтому затем следует принять решение о том, какое значение следует использовать. Если оба значения одинаковы, тогда это значение выбирают как Pulse_Number. Однако если два значения различны, тогда в качестве значения Pulse_Number выбирают значение Pulse_Number, выбранное при предыдущей итерации алгоритма.
При первой итерации алгоритма, когда, например, Fnet равна 50.0 Гц и Fpwm nom равна 2.5 кГц, оба значения Pulse_Number_hi и Pulse_Number_lo будут равны 49. Таким образом, выбранное значение Pulse_Number будет равно 49. Фактическая частота переключения (Fpwm) ШИМ может затем может быть определена в соответствии со следующим выражением:
Fpwm=Pulse_Number*Fnet.
Если Pulse_Number равно 49, тогда Fpwm задают равной 2.450 кГц. Значительные гармоники при этом возникают на частотах 2.250 кГц, 2.350 кГц, 2.550 кГц и 2.650 кГц (то есть на частотах, кратных умноженной на 45, 47, 51 и 53 частоте Fnet, так как основные гармоники, полученные за счет двухсторонней ШИМ, соответствуют Fpwm ± 2*Fnet и Fpwm ± 4*Fnet, когда N представляет собой нижнее целое).
Несмотря на то, что Pulse_Number изменяется только дискретно в соответствии с функцией ROUND, Fnet типично изменяется постепенно и непрерывным образом (обычно со сдвигом вверх или вниз, например, от номинальной фиксированной частоты 50 Гц), а это означает, что Fpwm также будет изменяться непрерывным образом. Таким образом, существует постепенное изменение Fpwm для диапазонов Fnet, где Pulse Number остается неизменным, причем ступенчатые изменения значений Fnet происходят при дискретном изменении Pulse_Number.
Определение фактической частоты переключения (Fpwm) ШИМ, необходимой для того, чтобы получать только целые гармоники Fnet, производят при помощи автономного контроллера 22, причем период общего сигнала времени задают равным обратной величине определенной Fpwm. Период общего сигнала времени затем измеряют при помощи контроллеров 18 и используют для задания фактического периода ШИМ, подаваемой на каждый сетевой мост 14 во время работы силовых преобразователей. Для такого определения автономный контроллер 22 требует измерения Fnet на одном из трансформаторов 6 или в питающей электрической сети с использованием соответствующих изолирующих и ослабляющих сигнал устройств (не показаны). Это измерение показано на фиг.1 пунктирной линией 26.
Сетевой мост 14 любого конкретного силового преобразователя может быть синхронизирован с общим сигналом времени при помощи объединенного с ним контроллера 18 следующим образом.
Контроллер 18 измеряет период общего сигнала времени и проверяет его нахождение в приемлемых пределах. Например, если минимальный период переключения каждого сетевого моста 14 составляет 400 мкс, тогда контроллер 18 проверяет, что измеренный период лежит между 435 мкс и 400 мкс. Период переключения ШИМ, поступающий на объединенный сетевой мост 14, затем постепенно снижают до измеренного периода, чтобы избежать нежелательных ступенчатых изменений. Другими словами, период переключения ШИМ может быть снижен постепенно до тех пор, пока он не станет равен измеренному периоду, в ходе нескольких периодов переключения ШИМ. Пилообразная функция также действует как фильтр подавления шумов общего сигнала времени.
Более конкретно, пилообразная функция, приложенная при помощи контроллера 18, может быть выражена следующим образом:
Ramped_Period=
Last_Ramped_Period+SIGN (Measured_Period_Last_Ramped_Period),
причем для следующей итерации пилообразная функция быть выражена следующим образом:
Last_Ramped_Period=Ramped_Period,
где Ramped_Period представляет собой результат пилообразной функции и отражает период ШИМ, который приложен контроллером 18 для этой итерации.
SIGN отражает математическую функцию, которая определяет полярность выражения в скобках, причем она равна +1, когда выражение в скобках является положительным, и равна -1, когда выражение в скобках является отрицательным.
Measured_Period представляет собой период общего сигнала времени, измеренный при помощи контроллера 18.
Таким образом, пилообразная функция подстраивает Ramped Period на одну ступеньку 200 нсек в течение одного периода ШИМ.
Для получения необходимого сдвига фазы между сетевыми мостами 14 первого, второго и третьего силовых преобразователей 1а, 1b и 1с Intended_Pulse_Arrival_Time изменяют на временной сдвиг, который вычисляют следующим образом:
Intended_Pulse_Arrival_Time=(Time_Offset*Measured_Period)+Delay_Comp,
где Time_Offset представляет собой значение в диапазоне от 0 до 100%, и в данном примере равно 0% для сетевого моста 14 первого силового преобразователя 1а, 33.3% для сетевого моста второго силового преобразователя 1b и 66.6% для сетевого моста третьего силового преобразователя 1с.
Delay_Comp представляет собой регулировку времени, при помощи которой ШИМ контроллера 18 сдвигают вперед или назад, чтобы компенсировать задержки при передаче общего сигнала времени.
Кроме того:
Phase_Error=Actual_Pulse_Arrival_Time-Intended_Pulse_Amval_Time,
где Phase_ Error выбирают в диапазоне ±0.5 Measured Period; и Actual_Pulse_Arrival_Time представляет собой обозначение импульса общего сигнала времени, принятого контроллером 18 и привязанного к таймеру ШИМ, как уже было указано здесь выше.
Фактический период ШИМ, который применяют в сетевом мосте 14 в конкретной итерации, при этом может быть определен следующим образом:
Applied_Period=Ramped_Period+SIGN_(Phase_Error).
В альтернативной схеме построения один из контроллеров 18 может быть назначен "главным" контроллером для создания общего сигнала времени для остальных "подчиненных" контроллеров. В этом случае определение фактической частоты переключения (Fpwm) ШИМ, необходимой для того чтобы получать только целые гармоники (и преимущественно только целые нечетные гармоники) изменяющейся во времени частоты (Fnet) питающей электрической сети, осуществляют при помощи "главного" контроллера, причем период общего сигнала времени устанавливают равным обратной величине определенной (вычисленной) Fpwm.
Базовая топология силового преобразователя для применений в качестве морской силовой установки будет рассмотрена далее со ссылкой на фиг.4.
В базовой топологии, показанной на фиг.4, три параллельно включенных силовых преобразователя 100а, 100b и 100с используют для сопряжения между приводами 102 двигателей переменной скорости и общей шиной переменного тока (названной SHIP SUPPLY NETWORK). Несколько генераторов 104 любого подходящего типа подают питание на шину переменного тока. Клеммы переменного тока каждого привода 102 двигателя подключены к клеммам переменного тока трехфазного моста 106 двигателя, который при нормальной работе действует как активный инвертор и создает поток мощности от линии 108 постоянного тока. Клеммы постоянного тока сетевого моста 110 подключены к линии 108 постоянного тока, причем при нормальной работе сетевого моста действует активный выпрямитель и создает поток мощности от шины переменного тока на линию постоянного тока. Клеммы переменного тока сетевого моста 110 подключены через фильтр 112 к шине переменного тока, которая является общей для всех параллельно включенных комбинаций силовой преобразователь/привод двигателя. Как мосты 106 двигателей, так и сетевые мосты 110 имеют обычную трехфазную двухуровневую топологию с группами полупроводниковых силовых переключающих приборов, которые имеют полное управление и регулировку с использованием (ШИМ). Однако на практике мосты 106 двигателей и сетевые мосты 110 могут иметь любую подходящую топологию, например такую как трехуровневая топология с фиксированной нейтральной точкой или многоуровневая топология (например, схема Foch-Maynard). Подходящим сетевым мостом 110 является инвертор ALSPA MV3000, который может быть закуплен на фирме Converteam Ltd of Boughton Road, Rugby, Warwickshire, CV21 1BU, Великобритания.
Изменения описанной здесь выше базовой топологии предусматривают использование единственного моста двигателя, приводящего в действие два или несколько двигателей, или единственного сетевого моста, питающего два или несколько мостов двигателей.
В морской силовой установке задачей является снижение до минимума гармонического искажения напряжения на шине переменного тока, возникающего за счет работы множества сетевых мостов 110, которые подключены к шине переменного тока. Контроллер 114, объединенный с каждым сетевым мостом 110, управляет ШИМ сетевого моста и получает общий сигнал времени от автономного тактирующего контроллера 116. Автономный тактирующий контроллер 116 может быть исключен, если общий сигнал времени вырабатывает один из контроллеров 114, как уже было указано здесь выше. ШИМ каждого сетевого моста 110 затем снабжают различным сдвигом фазы за счет различного временного сдвига периода переключения ШИМ каждого сетевого моста относительно общего временного сигнала. Сетевой мост 110 любого конкретного силового преобразователя может быть синхронизирован с общим сигналом времени при помощи объединенного с ним контроллера 114, как уже было указано здесь выше. За счет этого гармоническое искажение напряжения на шине переменного тока может быть по меньшей мере частично подавлено.
В схеме построения, показанной на фиг.4, оптимальное подавление гармоник обычно получают при приложении временных сдвигов 0%, 33.3% и 66.6% периода переключения ШИМ к сетевым мостам первого, второго и третьего силовых преобразователей 100а, 100b и 100с, соответственно. Однако могут быть использованы и другие схемы построения, в которых оптимальное подавление гармоник получают при использовании других временных сдвигов. Например, если первый силовой преобразователь 100а имеет номинальную мощность в 2 раза выше, чем второй и третий силовые преобразователи 100b и 100с, тогда улучшенное подавление гармоник может быть достигнуто при приложении временных сдвигов 0%, 50% и 50% периода переключения ШИМ к сетевым мостам первого, второго и третьего силовых преобразователей 100а, 100b и 100с, соответственно. Такое различие в номинальной мощности потребует соответствующего изменения электрических характеристик реакторов 112, чтобы реализовать это преимущество.
Настоящее изобретение также может быть использовано для применений статических вольт-амперных (VAR) компенсаторов (SVC). Базовая топология силового преобразователя для SVC применений будет рассмотрена далее со ссылкой на фиг.5.
В базовой топологии, показанной на фиг.5, клеммы переменного тока трех параллельно включенных сетевых мостов 200а, 200b и 200с подключены через фильтр 202 к общей сети переменного тока (названной AC NETWORK). Сетевые мосты 200 представляют инверторы напряжения с группами полупроводниковых силовых переключающих приборов, имеющих полное управление и регулирование с использованием ШИМ. В SVC применении задачей является снижение до минимума гармонического искажения напряжения сети переменного тока, возникающего за счет работы множества сетевых мостов 200 переменного тока, которые подключены к сети переменного тока. Контроллер 204, объединенный с каждым сетевым мостом 200, управляет ШИМ сетевого моста и получает общий сигнал времени от автономного тактирующего контроллера 206. Автономный тактирующий контроллер 206 может быть исключен, если общий сигнал времени вырабатывает один из контроллеров 204, как уже было указано здесь выше. ШИМ каждого сетевого моста 200 затем снабжают различным сдвигом фазы за счет различного временного сдвига периода переключения ШИМ каждого сетевого моста относительно общего временного сигнала. Сетевой мост 200 любого конкретного силового преобразователя может быть синхронизирован с общим сигналом времени при помощи объединенного с ним контроллера 204, как уже было указано здесь выше. За счет этого гармоническое искажение напряжения сети переменного тока может быть по меньшей мере частично подавлено.
Каскадная матрица
Альтернативная схема построения, отличающаяся от схемы построения с использованием параллельно включенных силовых преобразователей 1a, 1b и 1с, показанной на фиг, 1, будет описана далее со ссылкой на фиг.6-11. Эта схема построения позволяет выключать один или несколько контроллеров 18. Она позволяет также иметь одинаковые параметры всех контроллеров 18 и использовать одинаковые микропрограммы. Это позволяет избежать конфигурирования одного из контроллеров как постоянно "главного" контроллера, а остальных контроллеров как постоянно "подчиненных" контроллеров.
Контроллеры 18 подключены вместе с образованием каскадной матрицы. Более конкретно, каждый контроллер 18 имеет вход для приема сигнала времени от предыдущего контроллера в матрице и выход для передачи сигнала времени на следующий контроллер в матрице. Последний контроллер 18 в матрице передает сигнал времени на первый контроллер в матрице, чтобы завершить соединение и создать "замкнутый контур". Каскадная матрица из трех контроллеров 18а, 18b и 18с и объединенных с ними сетевых мостов 14а, 14b и 14с схематично показана на фиг.7. Вход и выход каждого контроллера 18 может быть выполнен с использованием волоконно-оптического канала, так что сигналы времени передают как оптические сигналы, например, через волоконно-оптические кабели. Могут быть использованы и другие средства передачи сигналов времени, например такие как электрические или радиочастотные (РЧ).
Каждый контроллер 18 имеет один и тот же временной сдвиг. Для примера, показанного на фиг.6, когда используют три параллельно включенных силовых преобразователя, каждый контроллер 18 имеет временной сдвиг 33.3% периода переключения ШИМ. Временной сдвиг обычно определяют в зависимости от числа контроллеров 18 в матрице. Например, временной сдвиг может составлять 100%/N, где N представляет собой число контроллеров 18 в матрице.
Автономный контроллер 24 получает информацию о состоянии от каждого из контроллеров 18 и передает информацию о подключении (CI1, CI2 и CI3) на каждый из контроллеров, как это показано на фиг.6. Информация о подключении содержит число N контроллеров 18 в матрице в любой данный момент времени.
Каждый контроллер 18 может передавать сигнал времени, который содержит группы цифровых импульсов времени, имеющих состояния 0 и 1. Период импульсов (то есть время между задними фронтами (спадами) последовательных импульсов времени) может быть измерен при помощи каждого контроллера 18, причем длительность каждого из импульсов времени (то есть промежуток времени, в течение которого имеется состояние 1) может быть использована для получения информации относительно положения в матрице контроллера, который передает сигнал времени.
Далее описано более подробно как каждому контроллеру придают роль "главного" или "подчиненного" контроллера. В той ситуации, когда все три силовых преобразователя 1a, 1b и 1с в матрице подключены к питающей электрической сети один за другим и работают нормально, контроллер 18а первого силового преобразователя 1 может быть "главным" контроллером, а контроллеры второго и третьего силовых преобразователей 1b и 1с могут быть "подчиненными" контроллерами. В этом примере контроллер 18а первого силового преобразователя 1а выдает на контроллер 18b второго силового преобразователя 1b первый сигнал времени S1, имеющий длительность импульса 20 мкс, и период импульсов, равный периоду переключения ШИМ своего сетевого моста 14а. Задний фронт первого сигнала времени S1 совпадает с началом периода переключения ШИМ его сетевого моста 14а и действует как точка отсчета времени, от которой задают временные сдвиги периодов переключения ШИМ сетевых мостов 14b и 14с.
Контроллер 18b второго силового преобразователя 1b получает первый сигнал времени S1, имеющий длительность импульса 20 мкс. Он измеряет период импульсов первого сигнал времени S1, задает период переключения ШИМ своего сетевого моста 14b так, что он совпадает с измеренным периодом импульсов, и прикладывает временной сдвиг, который равен 33.3% измеренного периода импульсов. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста 14b второго силового преобразователя 1b. Например, как это показано на фиг.8, период переключения ШИМ сетевого моста 14b, который в этом случае равен 400 мкс, смещен на 133 мкс от заднего фронта первого сигнала времени S1 (то есть от точки отсчета времени). Контроллер 18b второго силового преобразователя 1b выдает второй сигнал времени S2, имеющий длительность импульса, равную длительности импульса первого сигнал времени S1 плюс 20 мкс (то есть длительность импульса 40 мкс), и период импульсов, равный периоду переключения ШИМ своего сетевого моста 14b, который задан одинаковым с периодом переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Задний фронт второго сигнала времени S2 совпадает с началом периода переключения ШИМ его сетевого моста 14b.
Контроллер 18с третьего силового преобразователя 1с получает второй сигнал времени S2, имеющий длительность импульса 40 мкс. Он измеряет период импульсов второго сигнала времени S2, задает период переключения ШИМ своего сетевого моста 14с так, что он совпадает с измеренным периодом импульсов, и прикладывает временной сдвиг, который равен 33.3% измеренного периода импульсов. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста 14с третьего силового преобразователя 1с. Например, как это показано на фиг.8, период переключения ШИМ сетевого моста 14с смещен на 133 мкс от заднего фронта второго сигнала времени S2. Из рассмотрения фиг.8 легко понять, что период переключения ШИМ сетевого моста 14с смещен на 266 мкс от заднего фронта первого сигнала времени S1 (то есть от точки отсчета времени). Контроллер 18 с третьего силового преобразователя 1с выдает третий сигнал времени S3, имеющий длительность импульса, равную длительности импульса второго сигнала времени S2 плюс 20 мкс (то есть длительность импульса 60 мкс), и период импульсов, равный периоду переключения ШИМ своего сетевого моста 14с, который задан таким же, как и период переключения ШИМ сетевого моста 14b второго силового преобразователя 1b, и который, в свою очередь, задан таким же, как и период переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Задний фронт третьего сигнала времени S3 совпадает с началом периода переключения ШИМ его сетевого моста 14с.
Контроллер 18а первого силового преобразователя 1а получает третий сигнал времени S3, имеющий длительность импульса 60 мкс, который подтверждает его роль "главного" контроллера, при этом его работа остается неизменной.
Сигналы S1, S2 и S3 времени, которые передают контроллеры, для примера, в котором контроллер 18а первого силового преобразователя 1а представляет собой "главный" контроллер, контроллер 18b второго силового преобразователя 1b представляет собой первый "подчиненный" контроллер и контроллер 18с третьего силового преобразователя 1с представляет собой второй "подчиненный" контроллер, показаны схематично на фиг.8.
Период переключения ШИМ для сетевых мостов 14b и 14с второго и третьего силовых преобразователей 1b и 1с, соответственно, определены при помощи "главного" контроллера 18а первого силового преобразователя 1а и передаются на "подчиненные" контроллеры 18b и 18с при помощи первого и второго сигналов времени S1 и S2. Затем добавляют временные сдвиги для периодов переключения ШИМ, так что сетевые мосты 14а, 14b и 14с первого, второго и третьего силовых преобразователей работают с ШИМ, где периоды переключения сдвинуты соответственно на 0%, 33.3% и 66.6% измеренного периода импульсов.
Контроллеры 18 используют как "главные" контроллеры или "подчиненные" контроллеры в зависимости от того когда их подключают к сети. Контроллер силового преобразователя в матрице, который первым подключают к сети, преимущественно играет роль "главного" контроллера и занимает положение первого контроллера в матрице. Любой контроллер, который получает сигнал времени, когда его силовой преобразователь подключается к сети, преимущественно играет роль "подчиненного" контроллера. Любой "подчиненный" контроллер, который не получает сигнал времени по какой-либо причине (например, если отключается непосредственно предшествующий ему контроллер в матрице или если прерывается сигнал времени), может играть роль "главного" контроллера.
Легко можно понять, что матрица, самое малое, может иметь два или несколько "главных" силовых преобразователей, в зависимости от порядка, в котором происходит подключение силовых преобразователей. Матрица также может иметь два или несколько "главных" силовых преобразователей, если один или несколько силовых преобразователей отключаются от сети. В этом случае матрицу эффективно подразделяют на группы подматриц, причем каждый "главный" силовой преобразователь занимает положение первого силового преобразователя в объединенной с ним подматрице. Однако когда все силовые преобразователи в матрице подключены и работают надлежащим образом, тогда преимущественно будет только один "главный" силовой преобразователь.
В той ситуации, когда матрица эффективно подразделена на группы подматриц, автономный контроллер 24 может передавать информацию о подключении, так чтобы оптимизировать подавление гармоник скорее для каждой подматрицы, а не для матрицы в целом. Например, если матрица содержит семь силовых преобразователей, и третий и седьмой силовые преобразователи отключаются от сети, тогда матрицу эффективно делят на две подматрицы: первую подматрицу, содержащую первый и второй силовые преобразователи, и вторую подматрицу, содержащую четвертый, пятый и шестой силовые преобразователи. В этой ситуации автономный контроллер 24 будет получать информацию о состоянии от пяти контроллеров 18. Таким образом, в базовой схеме построения автономный контроллер 24 может передавать информацию о подключении, когда N=5, так что контроллеры 18, которые подключены, будут создавать временной сдвиг 20%. Однако при этом возникает проблема отсутствия временной зависимости между подматрицами. Поэтому автономный контроллер 24 преимущественно конфигурируют так, чтобы он мог определять положение и состояние силовых преобразователей в матрице (то есть чтобы он обладал "отображающей" способностью). В этом случае автономный контроллер 24 может оптимизировать подавление гармоник на уровне подматрицы. Например, автономный контроллер 24 может передавать информацию о подключении на контроллеры первой подматрицы, в которой N=2, и может передавать информацию о подключении на контроллеры второй подматрицы, в которой N=3. При этом все еще нет временной зависимости между двумя подматрицами, однако подавление гармоник внутри каждой подматрицы оптимизировано, что позволяет добиться общего улучшения. Это позволяет иметь постепенное ухудшение характеристик в том случае, если отключаются силовые преобразователи.
Вообще говоря, каждый контроллер 18 преимущественно конфигурирован так, чтобы оставаться "главным" контроллером, если он не получает сигнала времени или если сигнал времени имеет длительность импульса N*20 мкс, однако он переключается от своей роли "главного" контроллера к роли "подчиненного" контроллера, если он получает сигнал времени, имеющий длительность импульса 20 мкс или (N-1)*20 мкс или меньше, где N представляет собой число силовых преобразователей в матрице или в подматрице.
В некоторых случаях может быть необходимо предусмотреть защиту от ошибочного тактирования сигналов. Например, если период импульсов принятого сигнала времени находится вне заданного допуска или диапазона (то есть 400 мкс ≤ период импульсов ≤ 435 мкс), тогда контроллер 18 может получать роль "главного" контроллера или может отключать от сети объединенный силовой преобразователь.
Приведенные далее примеры поясняют как каскадная матрица из трех контроллеров, показанная на фиг.6, может работать в различных обстоятельствах.
1. Первый силовой преобразователь 1а первым подключается к сети и его контроллер 18а получает роль "главного" контроллера и занимает первое положение в матрице. Он использует местное определение периода переключения ШИМ сетевого моста 14а первого силового преобразователя 1а и выдает первый сигнал времени S1, имеющий длительность импульса 20 мкс и период импульсов, равный периоду переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Задний фронт первого сигнала времени S1 совпадает с началом периода переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Второй силовой преобразователь 1b вторым подключается к сети и его контроллер 18b получает первый сигнал времени S1. Он получает роль "подчиненного" контроллера, так как он получает сигнал времени и занимает второе положение в матрице. Контроллер 18b измеряет период импульсов первого сигнала S1 времени, задает период переключения ШИМ своего сетевого моста 14b так, чтобы он совпадал с измеренным периодом импульсов, и прикладывает временной сдвиг, который равен измеренному периоду импульсов, поделенному на N, где N представляет собой число силовых преобразователей, которые подключены к сети в любой данный момент времени, и передается на контроллеры при помощи автономного контроллера 24 в виде информации о подключении. (В случае фиксированной конфигурации эта информация о подключении может быть определена при помощи параметра, который хранится в контроллерах). Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста 14b второго силового преобразователя 1b. Контроллер 18b выдает второй сигнал времени S2, имеющий длительность импульса, равную длительности импульса первого сигнала времени S1 плюс 20 мкс (то есть длительность импульса 40 мкс), и период импульсов, равный периоду переключения ШИМ сетевого моста 14b второго силового преобразователя 1b. Задний фронт второго сигнала S2 времени совпадает с началом периода переключения ШИМ сетевого моста 14b второго силового преобразователя 1b. Третий силовой преобразователь 1с последним подключается к сети и его контроллер 18с получает второй сигнал времени S2. Он получает роль "подчиненного" контроллера, так как он получает сигнал времени, и занимает третье положение в матрице. Контроллер 18с измеряет период импульсов второго сигнала времени S2, задает период переключения ШИМ своего сетевого моста 14с так, чтобы он совпадал с измеренным периодом импульсов, и прикладывает временной сдвиг, который равен измеренному периоду импульсов, поделенному на N. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста 14с третьего силового преобразователя 1с. Контроллер 18с выдает третий сигнал времени S3, имеющий длительность импульса, равную длительности импульса второго сигнала времени S2 плюс 20 мкс (то есть длительность импульса 60 мкс), и период импульсов, равный периоду переключения ШИМ сетевого моста 14 с третьего силового преобразователя 1с. Задний фронт третьего сигнала S3 времени совпадает с началом периода переключения ШИМ сетевого моста 14с третьего силового преобразователя 1с. Контроллер 18а первого силового преобразователя 1а получает третий сигнал времени S3, имеющий длительность импульса 60 мкс, который подтверждает его роль "главного" контроллера, при этом его работа остается неизменной.
Таким образом, матрица конфигурирована в следующем порядке: контроллер 18а → контроллер 18b; контроллер 18b → контроллер 18с; контроллер 18с → контроллер 18а, как это показано на фиг.7.
2. Матрица в соответствии с приведенным здесь выше примером 1 работает нормально до тех пор, пока первый силовой преобразователь 1а не отключается от сети или не прерывается первый сигнал времени S1. Контроллер 18b второго силового преобразователя 1b при этом не получает больше сигнала времени, так что он теперь играет роль "главного" контроллера и занимает первое положение в матрице. Он использует местное определение периода переключения ШИМ сетевого моста 14b второго силового преобразователя 1b и теперь выдает первый сигнал времени S1, имеющий длительность импульса 20 мкс и период импульсов, равный периоду переключения ШИМ сетевого моста 14b второго силового преобразователя 1b. Задний фронт первого сигнала времени S1 на выходе контроллера 18b совпадает с началом периода переключения ШИМ сетевого моста 14b второго силового преобразователя 1b. Контроллер 18с третьего силового преобразователя 1с теперь получает первый сигнал времени S1. Он играет роль "подчиненного" контроллера, так как он получает сигнал времени, но занимает теперь второе положение в матрице. Контроллер 18с измеряет период импульсов первого сигнала времени S1, задает период переключения ШИМ своего сетевого моста 14с так, чтобы он совпадал с измеренным периодом импульсов, и прикладывает временной сдвиг, который равен измеренному периоду импульсов, поделенному на N. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста 14с третьего силового преобразователя 1с. Контроллер 18с теперь выдает второй сигнал времени S2, имеющий длительность импульса, равную длительности импульса первого сигнала времени S1 плюс 20 мкс (то есть длительность импульса 40 мкс), и период импульсов, равный периоду переключения ШИМ сетевого моста 14с третьего силового преобразователя 1с. Задний фронт второго сигнала времени S2 совпадает с началом периода переключения ШИМ сетевого моста 14с третьего силового преобразователя 1с. Когда первый силовой преобразователь 1а вновь подключается к сети, контроллер 18а получает второй сигнал времени, имеющий длительность импульса 40 мкс. Он играет роль "подчиненного" силового преобразователя, так как он получает сигнал времени, и занимает третье положение в матрице. Он измеряет период импульсов второго сигнала времени S2, задает период переключения ШИМ своего сетевого моста 14а так, чтобы он совпадал с измеренным периодом импульсов, и прикладывает временной сдвиг, который равен измеренному периоду импульсов, поделенному на N. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Контроллер 18а выдает третий сигнал времени S3, имеющий длительность импульса, равную длительности импульса второго сигнала времени плюс 20 мкс (то есть длительность импульса 60 мкс), и период импульсов, равный периоду переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Задний фронт третьего сигнала S3 времени с выхода контроллера 18а совпадает с началом периода переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Контроллер 18b второго силового преобразователя 1b получает третий сигнал времени S3, имеющий длительность импульса 60 мкс, который подтверждает его роль "главного" силового преобразователя, при этом его работа остается неизменной.
После прерывания первого сигнала S1 времени конфигурация матрицы станет следующей: контроллер 18b → контроллер 18с; контроллер 18с → контроллер 18а; контроллер 18а → контроллер 18b, как это показано на фиг.9.
3. Первый силовой преобразователь 1а первым подключается к сети и его контроллер 18а получает роль "главного" контроллера и занимает первое положение в матрице. Он использует местное определение периода переключения ШИМ сетевого моста 14а первого силового преобразователя 1а и выдает первый сигнал времени S1, имеющий длительность импульса 20 мкс и период импульсов, равный периоду переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Задний фронт первого сигнала времени S1 совпадает с началом периода переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Третий силовой преобразователь 1с вторым подключается к сети и его контроллер 18с получает роль "главного" контроллера и занимает первое положение в матрице. Он использует местное определение периода переключения ШИМ сетевого моста 14с третьего силового преобразователя 1с и выдает первый сигнал S1 времени, имеющий длительность импульса 20 мкс и период импульсов, равный периоду переключения ШИМ сетевого моста 14с третьего силового преобразователя 1с. Задний фронт первого сигнал времени S1 совпадает с началом периода переключения ШИМ сетевого моста 14 с третьего силового преобразователя 1с. Контроллер 18а первого силового преобразователя 1а теперь получает первый сигнал времени S1 с выхода контроллера 18с, имеющий длительность импульса 20 мкс. Поэтому он переключается от своей роли "главного" силового преобразователя к роли "подчиненного" силового преобразователя и занимает второе положение в матрице. Контроллер 18а измеряет период импульсов первого сигнала времени S1, задает период переключения ШИМ своего сетевого моста 14а так, чтобы он совпадал с измеренным периодом импульсов, и прикладывает временной сдвиг, который равен измеренному периоду импульсов, поделенному на N. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Контроллер 18а выдает второй сигнал времени S2, имеющий длительность импульса, равную длительности импульса первого сигнала времени S1 плюс 20 мкс (то есть длительность импульса 40 мкс), и период импульсов, равный периоду переключения ШИМ сетевого моста 14а первого силового преобразователя 1а. Задний фронт второго сигнала S2 времени совпадает с началом периода переключения ШИМ сетевого моста 14а второго силового преобразователя 1b.
В этот момент времени матрица будет иметь следующую конфигурацию: контроллер 18с → контроллер 18а; контроллер 18а → контроллер 18b, как это показано на фиг.10.
Когда второй силовой преобразователь 1b подключается к сети, его контроллер 18b получает второй сигнал времени S2, имеющий длительность импульса 40 мкм. Он теперь играет роль "подчиненного" контроллера, так как он получает сигнал времени, и занимает третье положение в матрице. Контроллер 18b измеряет период импульсов второго сигнала времени S2, задает период переключения ШИМ своего сетевого моста 14b так, чтобы он совпадал с измеренным периодом импульсов, и прикладывает временной сдвиг, который равен измеренному периоду импульсов, поделенному на N. Этот временной сдвиг используют для определения начала периода переключения ШИМ сетевого моста 14b второго силового преобразователя 1b. Контроллер 18b выдает третий сигнал времени S3, имеющий длительность импульса, равную длительности импульса второго сигнала времени S2 плюс 20 мкм (то есть длительность импульса 60 мкм), и период импульсов, равный периоду переключения ШИМ сетевого моста 14b второго силового преобразователя 1b. Задний фронт третьего сигнала времени S3 совпадает с началом периода переключения ШИМ сетевого моста 14b второго силового преобразователя 1b. Контроллер 18с третьего силового преобразователя 1с получает третий сигнал времени S3, имеющий длительность импульса 60 мкм, что подтверждает его роль "главного" силового преобразователя, причем его работа остается неизменной.
Матрица при этом имеет следующую конфигурацию: контроллер 18с → контроллер 18а; контроллер 18а → контроллер 18b; контроллер 18b → контроллер 18с, как это показано на фиг.11.
В схеме построения, показанной на фиг.6, любой контроллер в матрице может производить независимое местное определение периода переключения ШИМ для сетевого моста, объединенного с соответствующим силовым преобразователем, в том случае если этот преобразователь получает роль "главного" преобразователя. Период переключения ШИМ может быть фиксированным (основанным на внешнем сигнале времени известной длительности, поделенном на номинальную частоту переключения ШИМ, или может быть фиксированным числом, например таким как 400 мкм), или может быть переменным и может быть определен с использованием способа, описанного, например, в заявке на патент Великобритании 0617371.0. Когда контроллер получает роль "подчиненного" силового преобразователя, тогда период переключения ШИМ для сетевого моста объединенного с ним силового преобразователя определяют путем измерения периода импульсов принятого сигнала времени. Следовательно, период переключения ШИМ для сетевых мостов, объединенных с "подчиненными" контроллерами, определяют исключительно при помощи соответствующего "главного" контроллера.
Сетевые мосты 110 и 200, показанные соответственно на фиг.4 и 5, также могут быть подключены вместе, чтобы образовать каскадную матрицу, как уже было указано здесь выше.
Подробное описание подавления гармоник
Далее будет описано более подробно подавление гармоник при помощи силового преобразователя для ветротурбины, показанного на фиг.1.
Предположим, что каждый сетевой мост 14 работает с ШИМ с номинальной частотой переключения 2.5 кГц, и частота питающей электрической сети равна 50 Гц; тогда основные гармоники, генерируемые каждым силовым преобразователем в выходном напряжении 690 В при параллельных соединениях (то есть при соединениях между соответствующими понижающими трансформаторами 6 и питающей электрической сетью), связаны с первой гармоникой частоты переключения ШИМ. Более конкретно, за счет биений частоты получают боковые полосы со значительными гармониками при 2.3 кГц, 2.4 кГц, 2.6 кГц и 2.7 кГц (то есть на частотах, кратных умноженной на 46, 48, 52 и 54 номинально фиксированной частоте питающей электрической сети). Следует иметь в виду, что основное напряжение имеет действующее значение 690 В и поэтому находится вне диапазона оси у графиков, показанных на фиг.12-14.
Если все сетевые мосты 14 работают с одним и тем же временным сдвигом и с общим сигналом времени, как это показано на фиг.1, тогда складываются гармоники в напряжении 690 В при параллельных соединениях, что показано на фиг.12. Следует иметь в виду, что действующее значение напряжения гармоник порядков 48 и 52 составляет около 70 В. Кроме того, действующее значение напряжения гармоник порядков 99 и 101 составляет около 40 В. (Эти конкретные боковые полосы связаны с частотой биений между вторыми гармониками частоты переключения ШИМ и частотой сети).
Если сетевые мосты 14 силовых преобразователей la, lb и 1с работают с временными сдвигами 0%, 33.3% и 66.6% периода переключения ШИМ, соответственно, тогда будут подавлены гармоники, возникающие за счет частоты биений на первой и второй гармониках частоты переключения ШИМ и частотой сети. Это четко показано на фиг.13. Следует иметь в виду, что первые значительные возмущения происходят при порядках гармоник в области около 150, где конкретные боковые полосы связаны с частотой биения между третьей гармоникой частоты переключения ШИМ и частотой сети. Более того, будут подавлены также гармоники, возникающие за счет частоты биений на четвертой и некоторых других последующих гармониках частоты переключения ШИМ.
На практике могут быть нарушены идеальные характеристики, показанные на фиг.13 и полученные в соответствии с настоящим изобретением. Например, могут быть не достигнуты идеальные временные сдвиги по причине задержек в передаче общего сигнала времени или за счет ошибок синхронизации. Однако несмотря на то, что сетевые мосты 14 силовых преобразователей 1a, 1b и 1с работают не с идеальными временными сдвигами 0%, 38.5% и 72.5%, соответственно, из рассмотрения фиг.14 можно понять, что действующие напряжения гармоник порядков 48, 52, 99 и 101 имеют пониженные амплитуды, составляющие менее 10 В, по сравнению с результатами, показанными на фиг.12.
Гармонические искажения напряжения более высокого порядка также могут быть получены в питающей электрической сети, однако их не считают существенными при решении задач настоящего изобретения, причем они также могут быть подавлены при помощи соответствующих шунтирующих фильтров (не показаны).
Результаты, аналогичные показанным на фиг.13, могут быть получены также в случае каскадной матрицы, показанный на фиг.6, если каждый контроллер 18 создает временной сдвиг 33.3%.
Специалисты легко поймут, что подавление гармоник для применений морской силовой установки и для применений статического вольт-амперного (VAR) компенсатора (SVC), показанных соответственно на фиг.4 и 5, может быть осуществлено аналогичным образом.
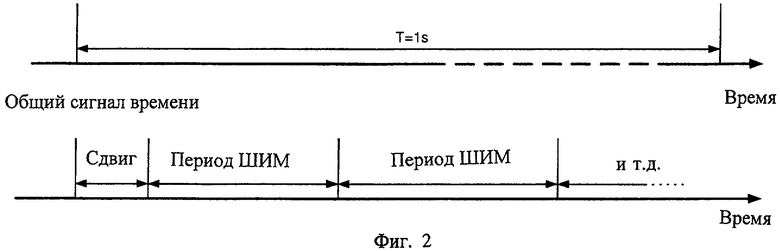
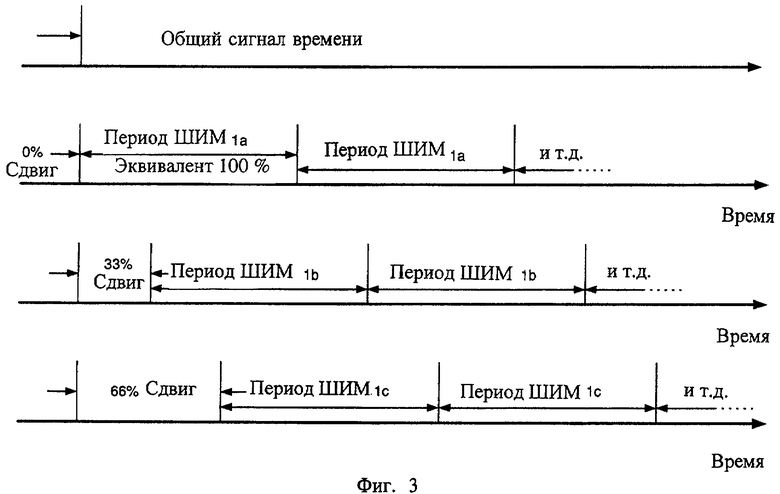
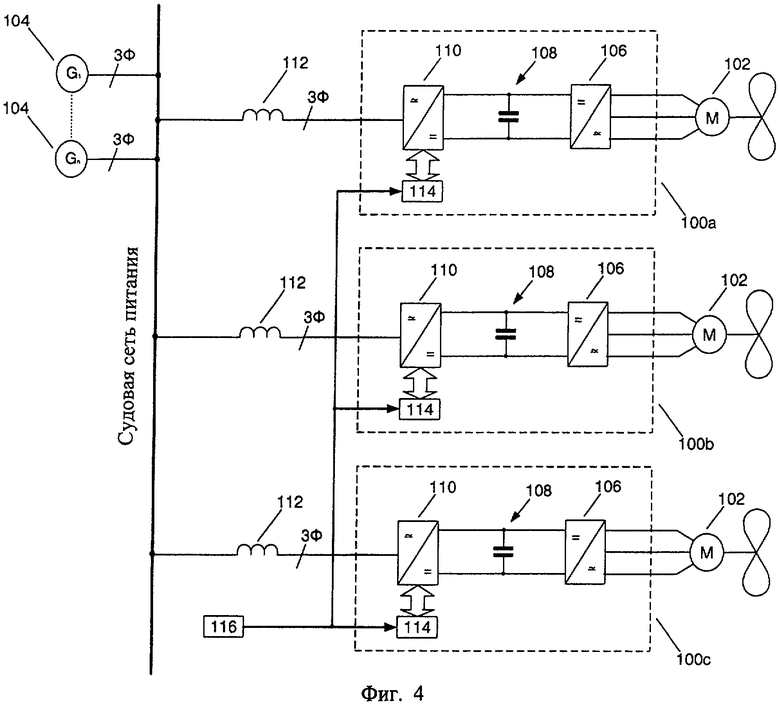
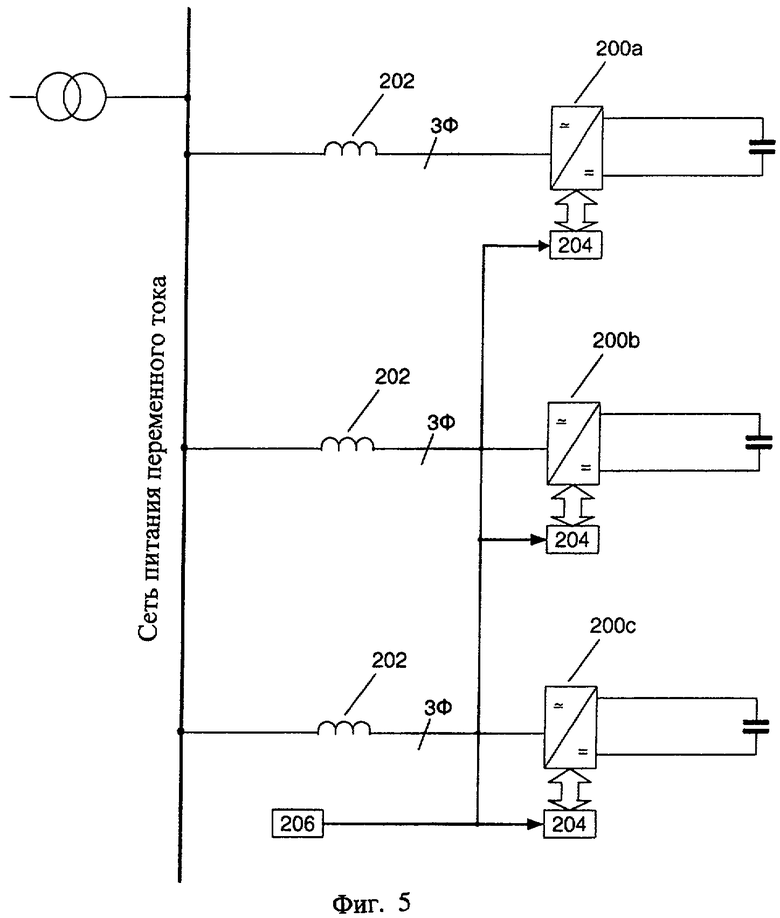
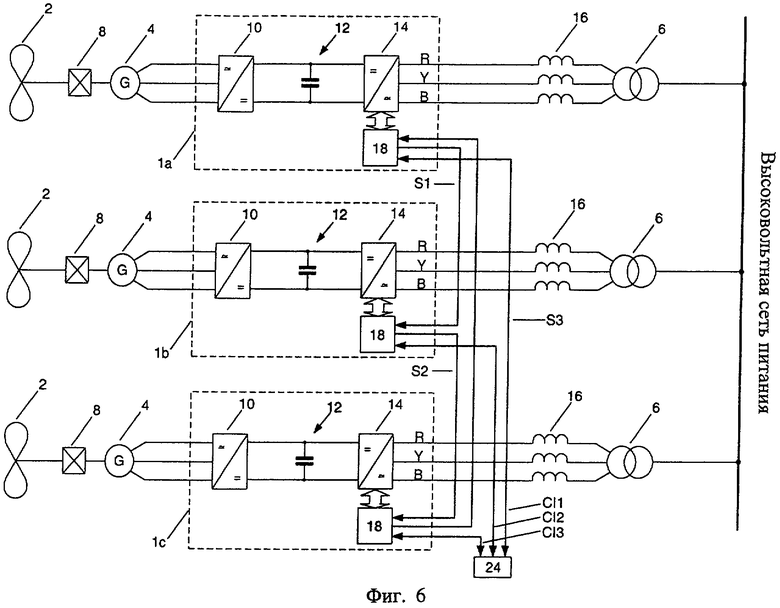
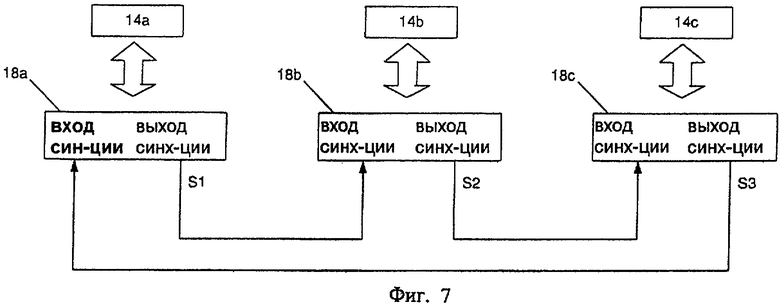
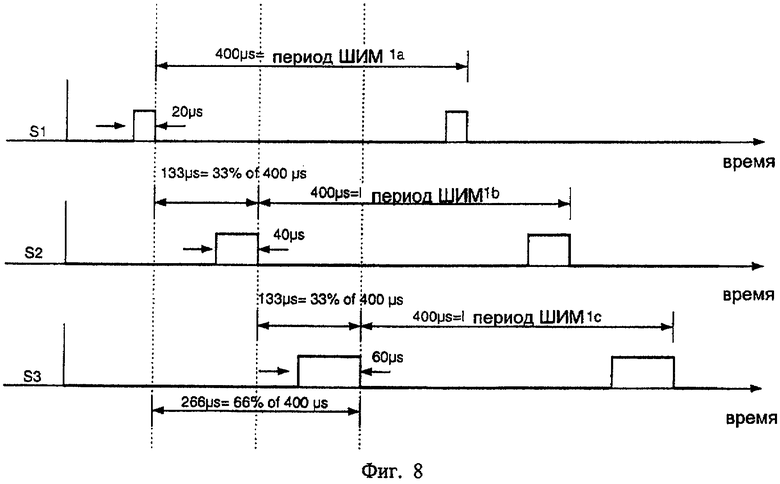
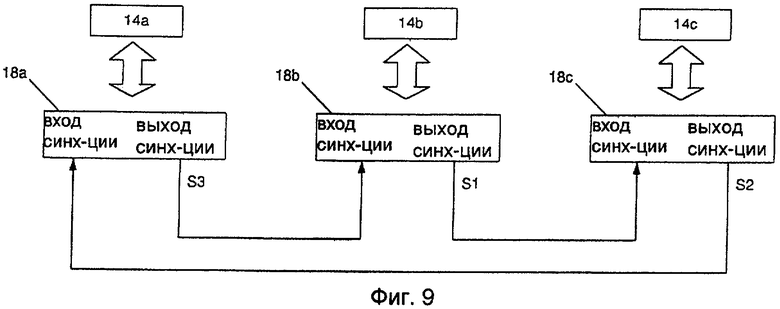
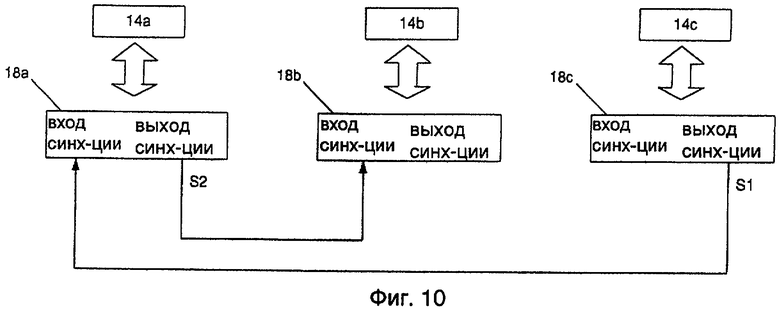
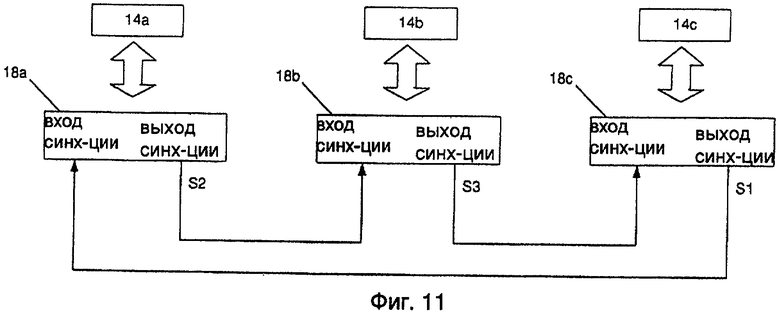
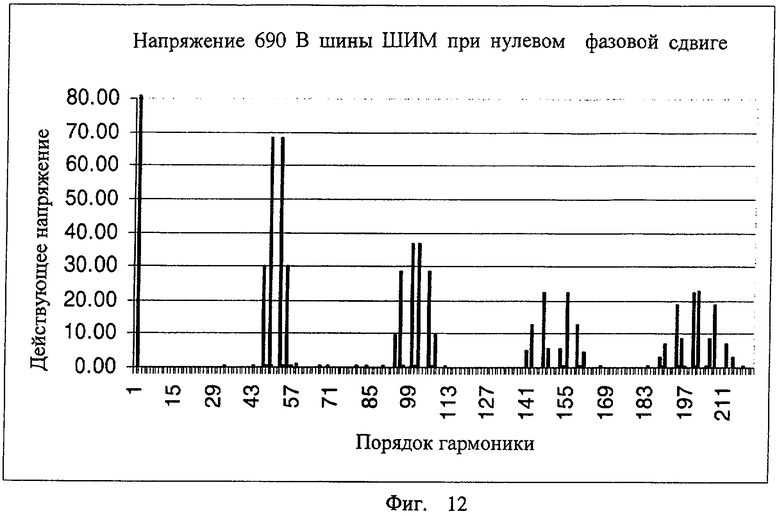
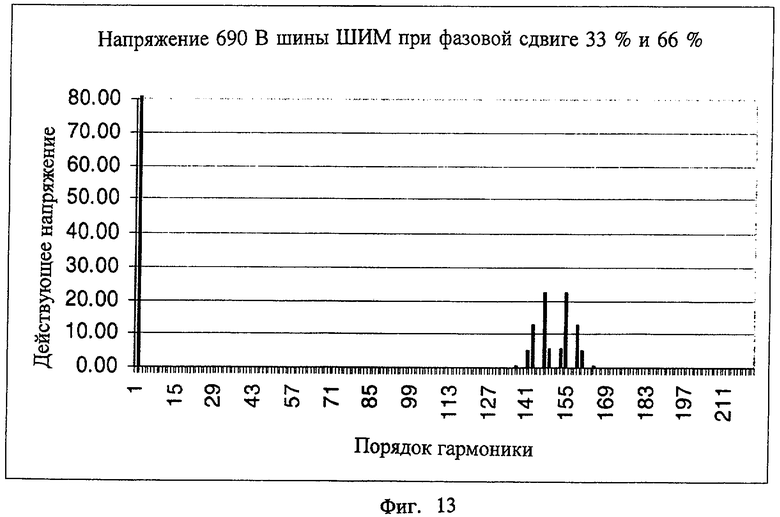
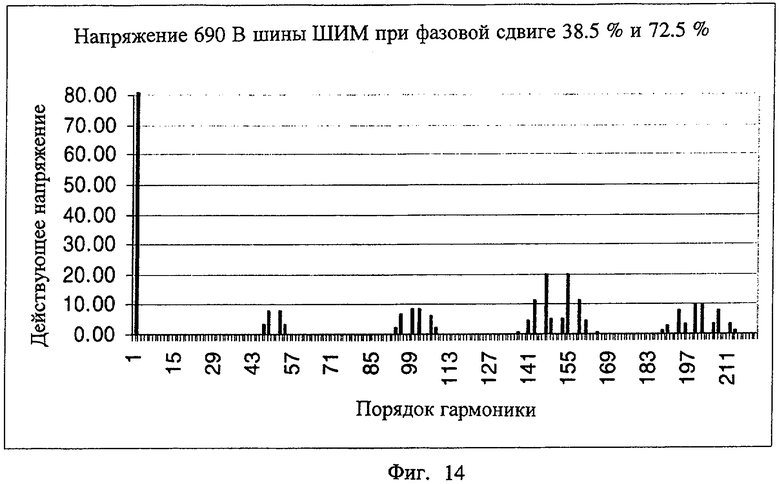
Изобретение относится к области электротехники. В изобретении предлагается способ управления множеством силовых преобразователей, которые могут быть использованы для сопряжения с питающей электрической сетью, шиной переменного тока и т.п. Каждый силовой преобразователь содержит сетевой мост, работающий в соответствии с широтно-импульсной модуляцией (ШИМ), имеющей один и тот же период переключения, которая создает по меньшей мере одну нежелательную гармонику в напряжении питающей электрической сети. Способ включает в себя операцию создания периода переключения ШИМ каждого сетевого моста с различным временным сдвигом относительно точки отсчета времени. При этом достигается технический результат - по меньшей мере одна нежелательная гармоника в напряжении питающей электрической сети будет по меньшей мере частично подавлена. Описаны два альтернативных пути создания временного сдвига. 2 н. и 47 з.п. ф-лы, 14 ил.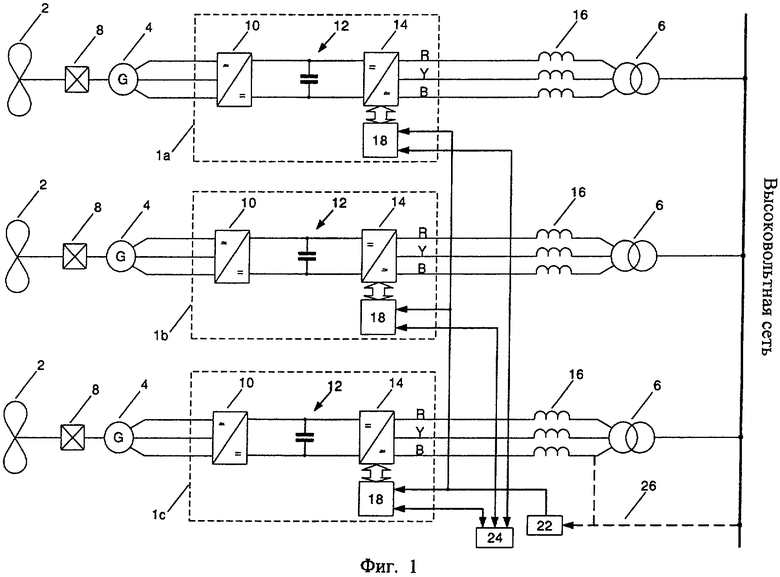
1. Способ управления множеством силовых преобразователей, которые могут быть использованы для сопряжения с питающей электрической сетью переменного тока, причем каждый силовой преобразователь содержит сетевой мост с клеммами переменного тока, соединенными с питающей сетью переменного тока, работающий в соответствии с широтно-импульсной модуляцией (ШИМ), которая может быть представлена как сигнал несущей, а этап обеспечения периода переключения ШИМ каждого сетевого моста с различной временной компенсацией по отношению к системе временных данных обеспечивает различный сдвиг фазы в сигнале несущей, имеющей один и тот же период переключения, которая создает, по меньшей мере, одну нежелательную гармонику в напряжении питающей электрической сети, отличающийся тем, что включает в себя операцию создания периода переключения ШИМ каждого сетевого моста с различным временным сдвигом относительно точки отсчета времени, что обеспечивает различный сдвиг фазы в сигнале несущей, так что, по меньшей мере, одна нежелательная гармоника в напряжении питающей электрической сети будет, по меньшей мере, частично подавлена.
2. Способ по п.1, который дополнительно включает в себя следующие операции:
выработка общего сигнала времени, действующего в качестве точки отсчета времени;
подача общего сигнала времени на каждый силовой преобразователь; и
создание периода переключения ШИМ каждого сетевого моста с различным временным сдвигом относительно общего сигнала времени, так чтобы, по меньшей мере, одна нежелательная гармоника в напряжении питающей электрической сети была, по меньшей мере, частично подавлена.
3. Способ по п.2, который дополнительно включает в себя операцию установки периода переключения ШИМ каждого сетевого моста равным периоду общего сигнала времени.
4. Способ по п.2 или 3, в котором период общего сигнала времени является фиксированным.
5. Способ по п.2 или 3, в котором питающая электрическая сеть работает с изменяющейся во времени частотой, и каждый сетевой мост работает в соответствии с ШИМ, имеющей частоту переключения, номинальную частоту переключения и число импульсов на период, при этом способ включает в себя дополнительно следующие операции:
изменение частоты переключения ШИМ в соответствии с изменяющейся во времени частотой питающей электрической сети, чтобы получать только целые гармоники изменяющейся во времени частоты; и установка периода общего сигнала времени равным обратной величине частоты переключения ШИМ, что позволяет получать только целые гармоники изменяющейся во времени частоты.
6. Способ по п.2, в котором общий сигнал времени вырабатывают при помощи автономного тактирующего контроллера и передают на каждый силовой преобразователь.
7. Способ по п.2, в котором общий сигнал времени вырабатывают при помощи одного из силовых преобразователей и передают на все остальные силовые преобразователи.
8. Способ по п.1, который дополнительно включает в себя следующие операции: определение числа силовых преобразователей, подключенных к питающей электрической сети; определение периода переключения ШИМ сетевого моста первого силового преобразователя; передача сигнала времени, имеющего период импульсов, равный периоду переключения ШИМ сетевого моста первого силового преобразователя, на второй силовой преобразователь, в качестве точки отсчета времени; измерение периода импульсов сигнала времени; установка периода переключения ШИМ сетевого моста второго силового преобразователя равным измеренному периоду импульсов сигнала времени; и сдвиг периода переключения ШИМ сетевого моста второго силового преобразователя относительно сигнала времени на промежуток времени, который главным образом равен измеренному периоду импульсов сигнала времени, поделенному на число силовых преобразователей, подключенных к питающей электрической сети, так что, по меньшей мере, одна нежелательная гармоника в напряжении питающей электрической сети будет, по меньшей мере, частично подавлена.
9. Способ по п.8, в котором N силовых преобразователей подключены к питающей электрической сети и образуют матрицу от первого силового преобразователя до N-го силового преобразователя.
10. Способ по п.9, который дополнительно включает в себя следующую операцию: передачу N-го сигнала времени, имеющего период импульсов, равный периоду переключения ШИМ сетевого моста N-го силового преобразователя в матрице, на первый силовой преобразователь в матрице.
11. Способ по п.9 или 10, который дополнительно включает в себя следующие операции: определение того факта, что силовой преобразователь в матрице N силовых преобразователей является первым при подключении к сети; и придание этому силовому преобразователю роли "главного" силового преобразователя и придание ему положения первого силового преобразователя в матрице.
12. Способ по п.9, который дополнительно включает в себя следующие операции: определение факта получения силовым преобразователем в матрице N силовых преобразователей сигнала времени, когда его подключают к сети; и придание этому силовому преобразователю роли "подчиненного" силового преобразователя в матрице.
13. Способ по п.9, в котором сигналы времени, передаваемые между смежными силовыми преобразователями в матрице N силовых преобразователей, содержат информацию о роли и/или положении в матрице силового преобразователя, который передает сигнал времени.
14. Способ по п.9, в котором сигналы времени, передаваемые между смежными силовыми преобразователями в матрице N силовых преобразователей, имеют один и тот же период импульсов.
15. Способ по п.9, в котором сигналы времени, передаваемые между смежными силовыми преобразователями в матрице N силовых преобразователей, имеют различные длительности импульсов, которые несут информацию о положении в матрице силового преобразователя, который передает сигнал времени.
16. Способ по п.15, в котором длительность импульса N-го сигнала времени, который был передан на первый силовой преобразователь в матрице N силовых преобразователей, используют в первом силовом преобразователе для подтверждения его роли "главного" силового преобразователя.
17. Способ по п.8, отличающийся тем, что период переключения ШИМ сетевого моста первого силового преобразователя является фиксированным.
18. Способ по п.8, отличающийся тем, что питающая электрическая сеть работает с изменяющейся во времени частотой, и каждый сетевой мост работает в соответствии с ШИМ, имеющей частоту переключения, номинальную частоту переключения и число импульсов на период, при этом способ включает в себя следующие операции: изменение частоты переключения ШИМ в соответствии с изменяющейся во времени частотой питающей электрической сети, чтобы получать только целые гармоники изменяющейся во времени частоты; и установка периода переключения ШИМ сетевого моста первого силового преобразователя равным обратной величине частоты переключения ШИМ, что позволяет получить только целые гармоники изменяющейся во времени частоты.
19. Способ по п.1, в котором регулируют временной сдвиг, связанный с одним или несколькими сетевыми мостами, если изменяется число силовых преобразователей, которые подключены к питающей электрической сети.
20. Способ по п.1, в котором каждый силовой преобразователь передает информацию о состоянии своего подключения или отключения.
21. Способ по п.1, в котором информацию о числе силовых преобразователей, подключенных к питающей электрической сети в любой данный момент времени, передают на все силовые преобразователи.
22. Способ по п.21, в котором информацию о подключении передают периодически.
23. Способ по п.21, в котором информацию о подключении передают тогда, когда изменяется число подключенных к сети силовых преобразователей.
24. Множество силовых преобразователей, которые могут быть использованы для сопряжения с питающей электрической сетью переменного тока, причем каждый силовой преобразователь содержит сетевой мост с клеммами переменного тока, соединенными с питающей сетью переменного тока, работающий в соответствии с широтно-импульсной модуляцией (ШИМ), которая может быть представлена как сигнал несущей, имеющей один и тот период переключения для всех преобразователей и создающей, по меньшей мере, одну нежелательную гармонику в напряжении питающей электрической сети, и контроллер, причем контроллеры создают период переключения ШИМ для каждого сетевого моста с различным временным сдвигом относительно точки отсчета времени, что обеспечивает различный сдвиг фазы в сигнале несущей, так что, по меньшей мере, одна нежелательная гармоника в напряжении питающей электрической сети будет, по меньшей мере, частично подавлена.
25. Множество силовых преобразователей по п.24, отличающееся тем, что общий сигнал времени подают на каждый силовой преобразователь как точку отсчета времени, при этом контроллеры создают период переключения ШИМ каждого сетевого моста с различным временным сдвигом относительно общего временного сигнала, так что, по меньшей мере, одна нежелательная гармоника в напряжении питающей электрической сети будет, по меньшей мере, частично подавлена.
26. Множество силовых преобразователей по п.25, отличающееся тем, что контроллеры задают период переключения ШИМ каждого сетевого моста, равный периоду общего сигнала времени.
27. Множество силовых преобразователей по п.25 или 26, отличающееся тем, что период общего сигнала времени является фиксированным.
28. Множество силовых преобразователей по п.25 или 26, отличающееся тем, что питающая электрическая сеть работает с изменяющейся во времени частотой, и сетевой мост каждого силового преобразователя работает в соответствии с ШИМ, имеющей частоту переключения, номинальную частоту переключения и число импульсов на период, при этом контроллеры изменяют частоту переключения ШИМ в соответствии с изменяющейся во времени частотой питающей электрической сети, чтобы получать только целые гармоники изменяющейся во времени частоты и задавать период общего сигнала времени, равным обратной величине частоты переключения ШИМ, чтобы получить только целые гармоники изменяющейся во времени частоты.
29. Множество силовых преобразователей по п.25, отличающееся тем, что преобразователи дополнительно содержат автономный тактирующий контроллер, позволяющий передавать общий сигнал времени на каждый силовой преобразователь.
30. Множество силовых преобразователей по п.25, отличающееся тем, что общий сигнал времени вырабатывают при помощи одного из силовых преобразователей и передают на все остальные силовые преобразователи.
31. Множество силовых преобразователей по п.24, отличающееся тем, что сигнал времени, который имеет период импульсов, равный периоду переключения ШИМ сетевого моста первого силового преобразователя, передают на второй силовой преобразователь как точку отсчета времени, при этом контроллер второго силового преобразователя позволяет: измерять период импульсов сигнала времени; устанавливать период переключения ШИМ сетевого моста второго силового преобразователя равным измеренному периоду импульсов сигнала времени; и сдвигать период переключения ШИМ сетевого моста второго силового преобразователя относительно сигнала времени на промежуток времени, который равен измеренному периоду импульсов сигнала времени, поделенному на число силовых преобразователей, подключенных к питающей электрической сети, так что, по меньшей мере, одна нежелательная гармоника в напряжении питающей электрической сети будет, по меньшей мере, частично подавлена.
32. Множество силовых преобразователей по п.31, отличающееся тем, что N силовых преобразователей подключены к питающей электрической сети и образуют матрицу от первого силового преобразователя до N-го силового преобразователя.
33. Множество силовых преобразователей по п.32, отличающееся тем, что N-й сигнал времени, который имеет период импульсов, равный периоду переключения ШИМ сетевого моста N-го силового преобразователя в матрице, передают на первый силовой преобразователь в матрице.
34. Множество силовых преобразователей по п.32 или 33, отличающееся тем, что сигналы времени, которые передают между смежными силовыми преобразователями в матрице N силовых преобразователей, содержат информацию о роли и/или положении в матрице силового преобразователя, который передает сигнал времени.
35. Множество силовых преобразователей по п.32, отличающееся тем, что сигналы времени, которые передают между смежными силовыми преобразователями в матрице N силовых преобразователей, имеют один и тот же период импульсов.
36. Множество силовых преобразователей по п.32, отличающееся тем, что сигналы времени, которые передают между смежными силовыми преобразователями в матрице N силовых преобразователей, имеют различные длительности импульсов, несущие информацию о положении в матрице силового преобразователя, который передает сигнал времени.
37. Множество силовых преобразователей по п.36, отличающееся тем, что длительность импульса N-го сигнала времени, который передан на первый силовой преобразователь в матрице N силовых преобразователей, используют в первом силовом преобразователе для подтверждения его роли "главного" силового преобразователя.
38. Множество силовых преобразователей по п.31, отличающееся тем, что период переключения ШИМ сетевого моста первого силового преобразователя является фиксированным.
39. Множество силовых преобразователей по п.31, отличающееся тем, что питающая электрическая сеть работает с изменяющейся во времени частотой, а сетевой мост каждого силового преобразователя работает в соответствии с ШИМ, имеющей частоту переключения, номинальную частоту переключения и число импульсов на период, при этом контроллеры позволяют изменять частоту переключения ШИМ в соответствии с изменяющейся во времени частотой питающей электрической сети, чтобы получить только целые гармоники с изменяющейся во времени частотой и задать период общего сигнала времени равным обратной величине частоты переключения ШИМ, что позволяет получить только целые гармоники изменяющейся во времени частоты.
40. Множество силовых преобразователей по п.31, отличающееся тем, что временной сдвиг, связанный с одним или несколькими сетевыми мостами, регулируют, если изменяется число силовых преобразователей, которые подключены к питающей электрической сети.
41. Множество силовых преобразователей по п.31, отличающееся тем, что каждый силовой преобразователь передает информацию о состоянии подключения или отключения.
42. Множество силовых преобразователей по п.31, отличающееся тем, что информацию о числе силовых преобразователей, которые подключены к питающей электрической сети в любой данный момент времени, передают на все силовые преобразователи.
43. Множество силовых преобразователей по п.42, отличающееся тем, что информацию о числе подключенных к сети силовых преобразователей передают периодически.
44. Множество силовых преобразователей по п.42, отличающееся тем, что информацию о числе подключенных к сети силовых преобразователей передают тогда, когда число подключенных к сети силовых преобразователей изменяется.
45. Множество силовых преобразователей по п.24, отличающееся тем, что каждый силовой преобразователь использован для сопряжения генератора с питающей электрической сетью.
46. Множество силовых преобразователей по п.24, отличающееся тем, что каждый силовой преобразователь использован для сопряжения двигателя с питающей электрической сетью (или шиной).
47. Множество силовых преобразователей по п.24, отличающееся тем, что каждый силовой преобразователь представляет собой преобразователь, работающий как статический вольт-амперный реактивный (VAR) компенсатор.
48. Множество силовых преобразователей по п.24, отличающееся тем, что сетевой мост каждого силового преобразователя представляет собой активный инвертор.
49. Множество силовых преобразователей по п.24, отличающееся тем, что сетевой мост каждого силового преобразователя представляет собой активный выпрямитель.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 6392905 B1, 21.05.2002 | |||
| Способ управления группой статических преобразователей | 1978 |
|
SU694972A1 |
| Устройство для управления группой из @ объединенных по выходу тиристорных преобразователей | 1986 |
|
SU1394376A1 |

