Изобретение относится к вычислительной технике и может быть использовано при построении и совершенствовании систем управления средствами мониторинга окружающей среды, получающими информацию различной физической природы об объектах или среде, находящихся на некотором удалении, а также активные информационные сигналы от удаленных технических средств, выполняющих различные задачи.
Предметом воздействия при разработке способа принята цифровая карта местности. Существуют различные способы построения цифровой карты местности, среди которых наиболее распространенным считается способ, когда цифровая карта местности составляется из атомарных элементов (площадей), имеющих свои координаты. Ввиду того, что атомарные элементы могут содержать множество характеристик местности, цифровая карта разбивается на двумерные массивы однотипных характеристик, часто их называют слоями. Индексами массивов выступают координаты, а значениями характеристики, например, для характеристик высоты рельефа каждому элементу соответствует усредненная в пределах периметра элемента высота.
Цифровые карты местности представляют собой информационные изделия. Особенностью данных изделий является то, что при их применении имеющиеся информационные возможности в ходе эксплуатации расширяются за счет добавления новых слоев пользователей. Данные возможности, как правило, допускаются изготовителями цифровых карт местности. В итоге пользователи в зависимости от характера воздействий на приобретенную цифровую карту местности в итоге всегда имеют свои оригинальным образом усовершенствованные изделия, которые применяют в соответствии со своими интересами.
Одним из полезных усовершенствований являются слои, представляющие собой расчетные зоны затенения. Существуют разнообразные способы обработки информации цифровой карты местности с целью построения расчетных зон затенения.
Известен способ построения расчетных зон затенения, который позволяет из точки стояния объекта оценить возможность прямой видимости удаленных объектов, находящихся на поверхности Земли или на некоторой высоте над Землей [2].
Исходными данными являются: цифровая карта высот рельефа местности, координаты точки стояния объекта, превышение объекта наблюдения над уровнем рельефа и превышение наблюдаемых объектов над уровнем рельефа, которые могут находиться в любой точке рассматриваемой области пространства. В качестве математического описания рельефа применяется матрица, содержащая значения высот, усредненных на площади квадрата, выбранного в качестве минимальной дискретной единицы измерения перепада высот. Матрица привязывается к координатной сетке применяемой системы координат и позволяет по координатам точки на карте выбирать конкретное значение усредненной высоты из двумерного массива матрицы высот.
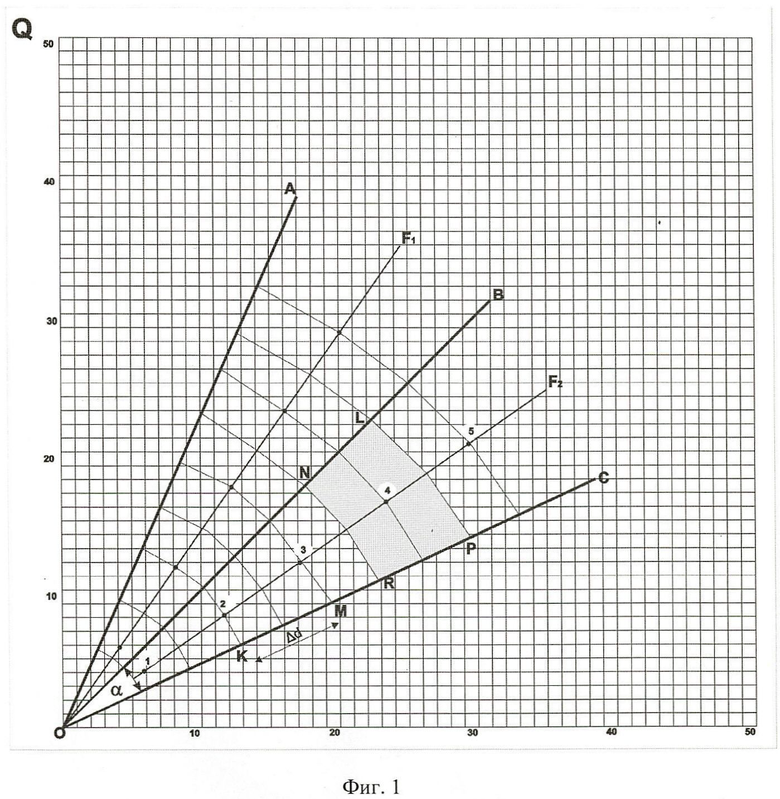
Для этого, Фиг.1, все пространство вокруг точки стояния объекта наблюдения О разбивается на равные сектора в горизонтальной плоскости Q, причем точка О∈Q. Угол сектора α в зависимости от требуемой точности может увеличиваться или уменьшаться. Так как обработка информации в секторах по всей окружности производится по одному и тому же алгоритму, на Фиг.1 показаны в виде равномерной прямоугольной сетки (50×50 квадратов) участок матрицы расположения дискретных квадратов усредненных высот, а также два смежных сектора: АОВ и BОС.
В секторах из точки О проводятся биссектрисы OF1 и OF2. Согласно методике на биссектрисах через равные дискретные расстояния Δd фиксируются точки. По координатам точек определяются индексы двумерного массива данных матрицы высот, а затем и конкретные числовые значения высоты фиксированных точек.
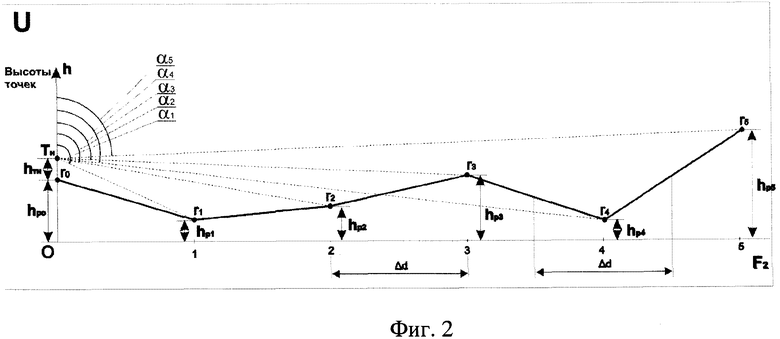
Затем для каждой биссектрисы строится срез рельефа местности в вертикальной плоскости, проведенной так, что биссектриса принадлежит этой вертикальной плоскости. На Фиг.2 показана вертикальная плоскость U для случая, когда OF2∈U. Проекция кривой, соединяющей точки, размещенные на соответствующих высотах, на вертикальную плоскость U представляет собой линию "среза" рельефа местности, изменяющего значение высот h через дискретные расстояния Δd выбора высоты.
Зоны затенения представляют собой совокупность элементарных площадей усеченных секторов вида NLPR, Фиг.1. Принадлежность секторов зоне затенения или зоне видимости определяется видимостью из точки наблюдения центральной точки усеченных секторов, для случая, рассмотренного на Фиг.1, точка r4∈NLPR.
Видимость точки определяется следующим образом. На "срезе" рельефа местности, Фиг.2, из точки наблюдения Тн проводятся лучи в точки, характеризующие дискретные высоты рельефа. Для случая, изображенного на Фиг.2, это точки r1, r2, r3, r4, r5.
Затем последовательно от ближней точки к самой дальней проводится анализ углов, образованных поворотом луча от Тнh вокруг точки наблюдения Тн по часовой стрелке до направлений в точки r1, r2, r3, r4, r5. Для случая на Фиг.2 углы α1, α2, α3, α4, α5.
На каждом k-м шаге определяется соотношение очередного угла αk с текущим углом закрытия βзакр, а затем проводится уточнение величины угла закрытия.
Условие видимости точки rk из точки наблюдения Тн состоит в том, что

Во всех остальных случаях считается, что очередная точка rk невидима из точки наблюдения Tн, а соответствующий усеченный сектор принадлежит зоне затенения.
На каждом шаге уточнение величины угла закрытия выполняется следующим образом. Начальное значение угла закрытия βзакр 0 принимается равным 180°. На каждом k-м шаге анализа закрытия после проверки видимости точки (1) выполняется операция сравнения:

и определяется очередное значение угла закрытия.
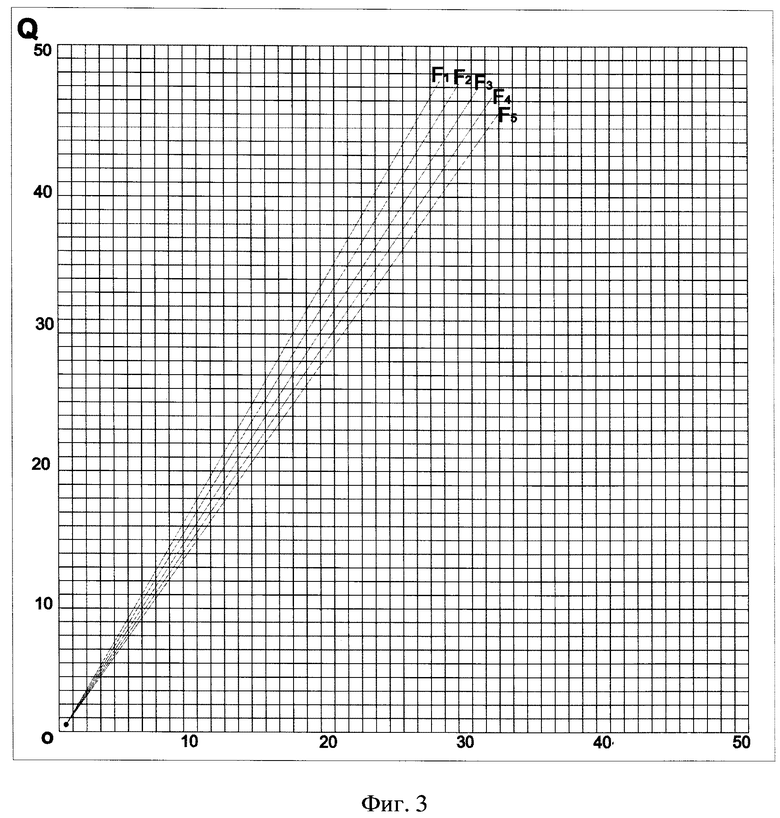
Недостаток данного способа состоит в том, что с увеличением расстояния элементарные площади, составляющие зоны затенения, увеличиваются, а усредненная высота в усеченном секторе при наличии пересеченной местности все меньше соответствует реальным высотам на направлениях. Попытки уменьшения углов секторов приводят к значительному количеству избыточных вычислений, так как в этом случае соседние биссектрисы многократно проходят по одним и тем же дискретным единицам измерения перепада высот цифровой карты рельефа местности, Фиг.3.
Существенным недостатком данного способа является необходимость применения тригонометрических функций при определении дискретных квадратов, соответствующих точкам, находящимся на биссектрисах секторов через равные промежутки Δd.
С точки зрения повышения адекватности построения зон затенения более совершенным считается способ, когда прямая видимость определяется отдельно в каждой элементарной дискретной единице цифровой матрицы высот рельефа.
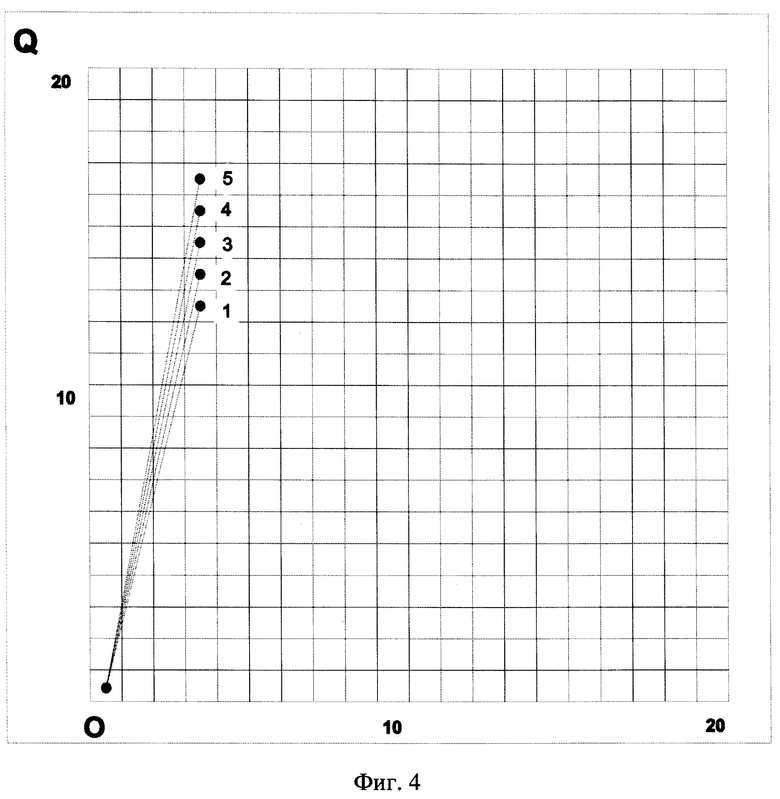
Особенность данного способа состоит в том, что из точки наблюдения проводятся лучи в центр каждого квадрата, являющегося элементарной дискретной единицей цифровой матрицы высот рельефа, Фиг 4. Оценка возможности прямой видимости производится не по выбранной дискретной дальности Δd, а при каждом переходе из одной дискретной единицы перепада высот в очередную по направлению луча, направленного из точки стояния О в направлении выбранного для анализа квадрата, т.е. точки 1, 2, 3, 4, 5, Фиг.4.
Применение данного способа позволяет строить зоны затенения не из усеченных секторов, обработка формы которых представляет затруднения, а из совокупности площадей элементарных квадратов, представляющих собой элементарные дискретные единицы матрицы перепада высот. Такое построение является предельным при заданном размере дискретной единицы перепада высот и, соответственно, обладает большей адекватностью формы зоны затенения рельефу, представленному матрицей высот, используемой в расчетах. Кроме того, вычисление угла закрытия определяется с учетом высоты каждой элементарной единицы матрицы высоты на пути продвижения луча.
Продвижение луча в очередной квадрат, выбранный для оценки прямой видимости, связано не с угловым, а с линейным перемещением от одного смежного квадрата к другому, что позволяет определять очередной квадрат без применения тригонометрических функций и тем самым значительно сократить процесс определения квадратов за счет применения алгоритма Брезенхэма [1], позволяющего проводить минимальное количество вычислений для выбора очередного смежного квадрата на луче.
Вместе с тем, как видно на Фиг.4, и при этом способе не удается избавиться от повторений, т.к. соседние лучи также проходят большое количество одних и тех же элементарных квадратов цифровой матрицы рельефа.
Таким образом, оба способа при достижении максимальной адекватности содержат большое количество избыточных вычислений, что приводит к большой продолжительности решения задачи построения расчетной зоны затенения. В зависимости от величины рассматриваемого участка местности и уровня детализации перепада высот в цифровой карте продолжительность может составлять часы или даже сутки.
В тех случаях, когда предполагается, что точка наблюдения будет долгое время находиться на одном месте, например вышка радиоретранслятора, увеличение продолжительности определения расчетных зон затенения не сказывается на процессе организации связи. Когда же точка наблюдения перемещается, например, движение самолета или лидарной установки, задержка вычислений даже на насколько минут приводит к тому, что полученные результаты будут бесполезными для выполнения задач наблюдения заданных участков местности или воздушного пространства.
В качестве прототипа данного изобретения выбран способ, сходный с заявляемым по сущности воздействия на информационное изделие, которое изменяет свое состояние за счет наращивания информационных возможностей введением слоев зон затенения для определенных условий. Прямая видимость определяется отдельно в каждой элементарной дискретной единице цифровой матрицы высот рельефа в пределах заданного участка просмотра.
Указанный способ основывается на следующих положениях и исходных данных.
Под прямой видимостью понимается беспрепятственное прохождение луча из точки наблюдения в точку, для которой определяется прямая видимость. Зона затенения - зона, представляющая собой совокупность точек, для которых не выполняется условие прямой видимости.
Исходные данные: Цифровая матрица высот рельефа, координаты точки стояния объекта наблюдения, значение высоты превышения объекта наблюдения над уровнем рельефа и значение превышения наблюдаемых объектов над уровнем рельефа.
Основой построения зон затенения является цифровая матрица высот рельефа.
Вся площадь местности, на которой производится построение зон затенения, разбивается на квадраты со стороной l. Каждый квадрат представляет собой минимальную дискретную единицу площади, на которой значение высоты принимается неизменным. Для определения этого значения на участке местности, ограничиваемом периметром квадрата, определяется hmax - максимальное и hmin - минимальное значение высоты местности (местных предметов), а затем определяется среднее значение, которое принимается за высоту, приписываемую дискретной единице

Для корректного применения в математическом аппарате вычислений все значения дискретных единиц измерения высоты сводятся в прямоугольную матрицу H[m×n]. Таким образом, на основании матрицы при наличии координат квадрата i,j определяется высота рельефа на направлении распространения луча прямой видимости  .
.

Координаты точки стояния объекта наблюдения позволяют определить исходный квадрат цифровой матрицы высот, из центра которого строятся лучи прямой видимости в центры квадратов, выбираемых для определения наличия прямой видимости.
Значение высоты превышения объекта наблюдения над уровнем рельефа и значение превышения наблюдаемых объектов над уровнем рельефа позволяют определить расположение точек в пространстве. Высота представляет размер вертикальной линии из точки наблюдения (наблюдаемой точки) до пересечения с поверхностью, описывающей форму рельефа.
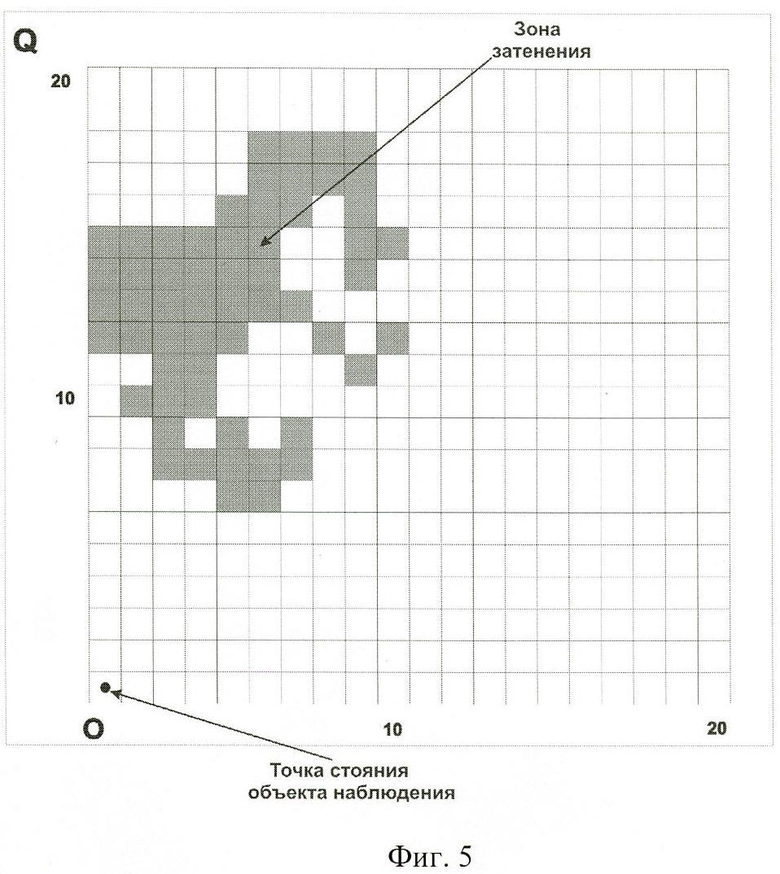
Сущность способа состоит в том, что на горизонтальной плоскости фиксируются координаты точки стояния объекта наблюдения с точностью до квадрата цифровой матрицы высот. По координатам квадрата определяется высота рельефа. Сложением высоты рельефа в точке стояния объекта наблюдения и высоты превышения объекта наблюдения над уровнем рельефа определяется абсолютная высота объекта наблюдения. Затем из этой точки определяется совокупность квадратов, для которых выполняется условие прямой видимости объектов, находящихся в квадратах на фиксированной высоте превышения над рельефом, все остальные квадраты составляют зону затенения для заданных условий, Фиг.5.
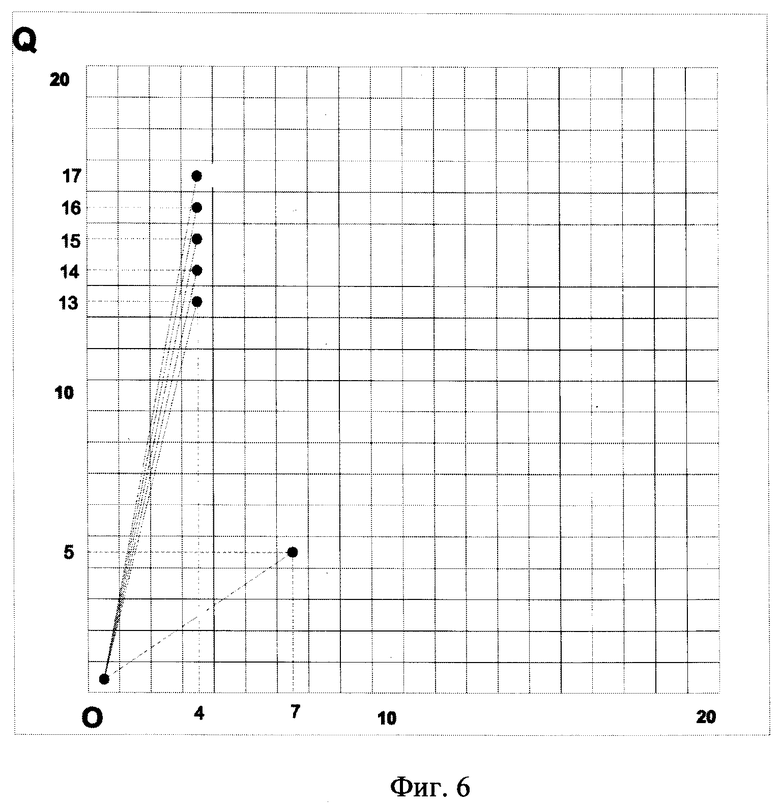
Для определения наличия прямой видимости в квадратах на горизонтальной плоскости последовательно строятся прямые отрезки, соединяющие точку центра квадрата, в котором расположен объект наблюдения с точками, расположенными в центрах квадратов, рассматриваемых на возможность прямой видимости. Выборка для оценки возможности прямой видимости для квадратов с координатами (4,13); (4,14); (4,15); (4,16); (4,17); (7,5) показана на Фиг.6.
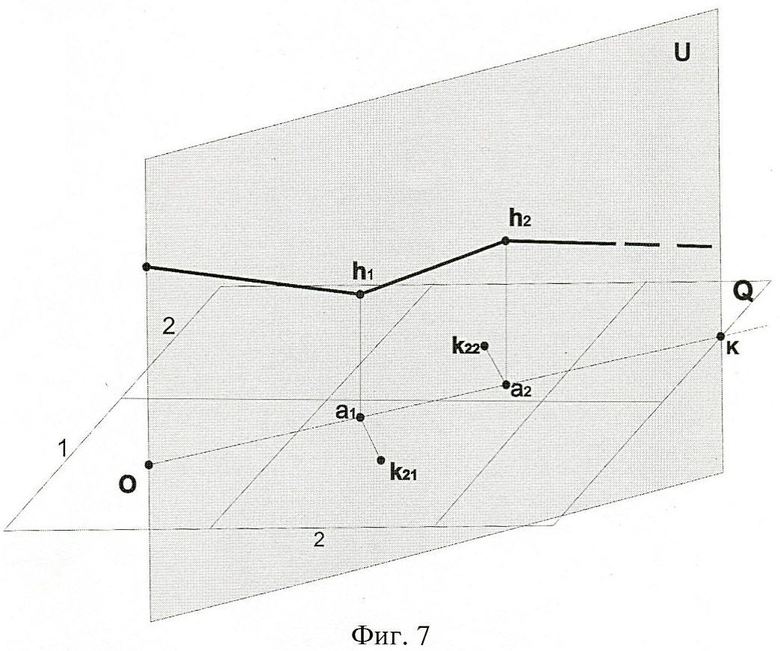
Через каждый отрезок строится вертикальная плоскость U. На этой плоскости воспроизводится срез рельефа местности как линия, соединяющая точки на плоскости, которые получаются следующим образом, Фиг.7.
Если отрезок пересекает квадрат цифровой матрицы рельефа, Фиг.7, квадрат (2,1), из центра этого квадрата точка k21 проводится перпендикулярно к отрезку ОК. Из точки пересечения отрезка с перпендикуляром, точка a 1, строится перпендикуляр в вертикальной плоскости U, длина которого соответствует высоте рельефа в рассматриваемом квадрате. Искомая точка h1 находится на удаленном от отрезка конце перпендикуляра.
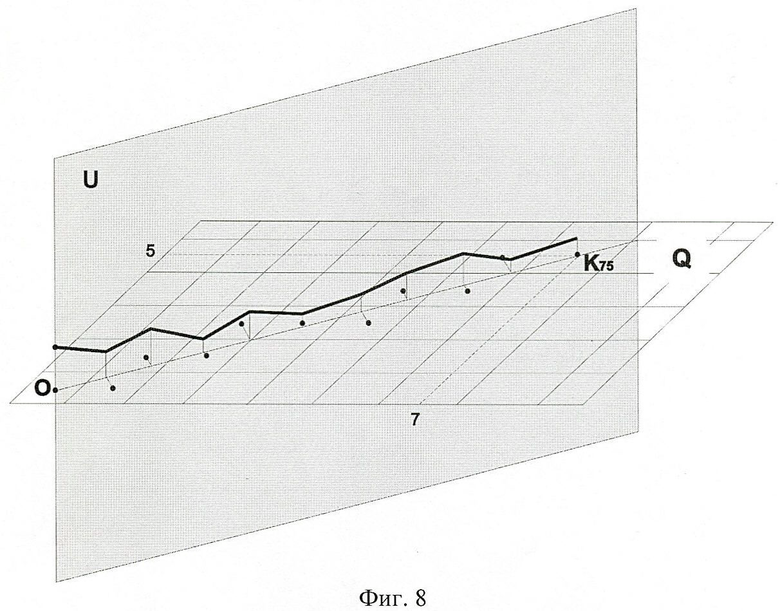
На Фиг.8 показано построение рельефа местности применительно для квадрата (7,5).
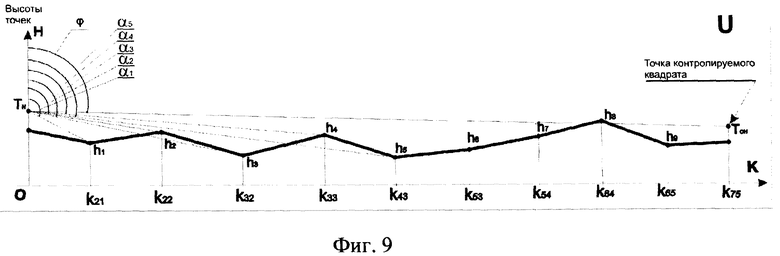
Видимость точки очередного квадрата, оцениваемого на предмет прямой видимости, определяется следующим образом. На "срезе" рельефа местности, Фиг.9, из точки наблюдения Тн проводятся лучи в точки h1, h2,…,h9, характеризующие высоты рельефа квадратов, пересекаемых плоскостью U, а также луч в точку центра объекта наблюдения Тон, имеющую высоту предполагаемого объекта наблюдения в оцениваемом квадрате. Затем проводится анализ углов α, образованных вращением вертикали ТнН вокруг точки Tн по часовой стрелке до совпадения с проведенными лучами Тнh1, Тнh2, Тнh3 и т.д. до Tнh9 с углом φ, образованным вращением вертикали ТнН вокруг точки Tн по часовой стрелке до совпадения с лучом, проведенным из точки Тн в точку Тон, характеризующую высоту предполагаемого объекта наблюдения в оцениваемом квадрате.
При данном построении условие прямой видимости точки Tон из Tн будет следующее:

Во всех остальных случаях считается, что очередная точка расположения объекта наблюдения Тон невидима из точки наблюдения Тн, и соответствующий квадрат принадлежит зоне затенения, определяемой при заданных исходных условиях. Значение δ=αmin из α∈(α1,α9) называется углом закрытия для очередного анализируемого квадрата. Данный угол всегда меньше или равен φ для квадратов зоны затенения, больше φ для квадратов зоны видимости.
Анализ способа показал, что имеется большое количество избыточных вычислений, вызванных дублированием анализа углов α при вычислении видимости наблюдаемых объектов в соседних квадратах, что приводит к большой продолжительности решения задачи построения расчетной зоны затенения. В зависимости от величины рассматриваемого участка местности, заданного количества фиксированных высот превышения наблюдаемых объектов над рельефом, а также уровня детализации перепада высот в цифровой карте продолжительность может составлять часы и даже сутки. Это обстоятельство ограничивает эффективность применения аналитического анализа рельефа местности в системах, решающих задачи в условиях ограниченного времени.
Попытки исключения дублирования анализа углов α при вычислении видимости наблюдаемых объектов в соседних квадратах применением дополнительных вычислительных модулей позволило уменьшить количество полностью одинаковых вычислений, однако в рамках данного способа временные затраты на поиск и обработку результатов найденных повторяемых последовательностей на "срезе" рельефа местности соизмеримы с временными затратами на повторный анализ, а иногда и превосходят их.
Недостатком способа прототипа являются ограниченные возможности по исключению избыточных вычислений, вызванных дублированием анализа углов α при вычислении видимости наблюдаемых объектов в соседних квадратах цифровой карты местности.
Целью настоящего изобретения является сокращение времени на построение расчетных зон затенения, применяемых при организации управления системами сбора информации.
В основу изобретения поставлена задача разработки нового способа построения расчетных зон затенения, позволяющего исключить повторные вычисления при прохождении соседних лучей прямой видимости через одни и те же элементарные квадраты цифровой матрицы высот рельефа местности.
Решение задачи достигается тем, что построение расчетных зон затенения основывается на цифровом блоке управления, который хранит информацию о наличии дублируемых участков и позволяет расчетные действия заменить управляемым выбором, а также исключить повторный анализ углов α в ходе определения прямой видимости наблюдаемых объектов, находящихся в расположенных рядом квадратах.
Цифровой блок управления создается до начала обработки информации цифровой матрицы высот рельефа местности для формирования зон затенения в соответствии с:
1. размерами площади анализируемой территории;
2. характеристиками цифровой матрицы высот рельефа;
3. принятой последовательностью просмотра квадратов цифровой матрицы высот рельефа на наличие прямой видимости объекта, находящегося в пределах периметра выбранного квадрата на поверхности Земли, или на некотором превышении из точки наблюдения, также привязанной к конкретному квадрату цифровой матрицы высот рельефа.
Основу блока управления составляют две матрицы: матрица управления вычислениями и матрица хранения промежуточных результатов вычислений.
Матрица управления вычислениями представляет собой матрицу Y[n×n], где n - сторона наибольшего измерения цифровой матрицы высот, накладываемой на анализируемый участок местности. В ней содержатся индексы квадратов для перехода алгоритма на новый этап вычислений.
Матрица хранения промежуточных результатов вычислений представляет собой матрицу P[n×n], где n - сторона наибольшего измерения цифровой матрицы высот, накладываемой на анализируемый участок местности. В ней хранятся углы закрытия, определенные в ходе вычислений, которые могут быть использованы на последующих этапах вычислений для исключения повторений из-за прохождения луча, определяющего "срез" рельефа, по одним и тем же квадратам цифровой карты местности.
Сущность функционирования блока управления состоит в том, что перед началом анализа местности на наличие прямой видимости определяется последовательность просмотра квадратов цифровой карты местности относительно квадрата расположения объекта наблюдения. Данное действие необходимо ввиду того, что от последовательности анализируемых квадратов зависят состав квадратов и значения углов закрытия для квадратов, предшествующих очередному анализируемому квадрату, по которым определяется дальнейшая последовательность вычислений.
В ходе вычислений, начиная с первого выбранного для анализа квадрата, каждый очередной угол закрытия δ сохраняется в матрице хранения промежуточных результатов вычислений и запоминаются его индексы для последующего выбора.
При анализе "среза" рельефа местности очередного квадрата перед началом сравнения углов α делается проверка информации об углах закрытия ранее рассмотренных квадратов, которая проводится следующим образом.
Пусть в очередном случае (например, для k75) "срез" рельефа проходит по квадратам в следующей последовательности:

Если среди результатов предыдущих вычислений найдется хоть одна последовательность из следующего набора последовательностей:
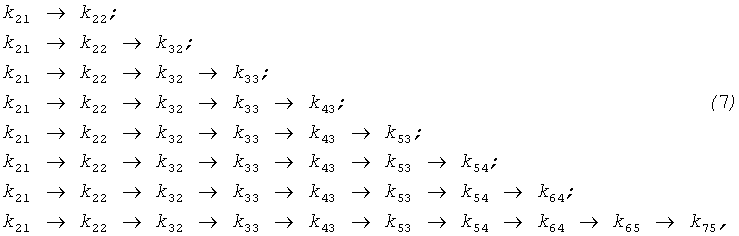
имеющая для крайнего правого квадрата значение угла закрытия δ, то в зависимости от найденной последовательности вычисление углов в данном очередном случае выполняется только для оставшихся членов последовательности (6), а значение исходного угла α для крайнего правого квадрата принимается равным δ.
Следует отметить, что при наличии двух и более таких последовательностей выбирается последовательность с большим количеством членов k.
Информация о наиболее продолжительной последовательности для каждого квадрата определяется заранее и хранится в матрице управления вычислениями, а δ в матрице хранения промежуточных результатов вычислений.
Таким образом, при обработке данных цифровой карты местности с целью построения расчетной зоны затенения циклическая обработка данных перебираемых квадратов "среза" рельефа местности частично заменяется управляемым выбором значений.
Сопоставительный анализ заявляемого способа построения расчетных зон затенения управляемым перебором квадратов цифровой карты местности с прототипом, выполняющим циклическую обработку данных перебираемых квадратов "среза" рельефа местности, позволяет сделать вывод, что заявляемый способ базируется на новых информационных элементах, входящих в цифровой блок управления: матрица управления вычислениями и матрица хранения промежуточных результатов вычислений, поэтому заявляемый способ соответствует критерию "новизна".
Известные способы построения расчетных зон затенения не позволяют исключить избыточность вычислений, вызванную повторным анализом углов α при вычислении видимости наблюдаемых объектов в соседних квадратах. Введенные элементы за счет своего информационного состояния, сформированного до начала построения расчетных зон затенения, позволяют по-новому осуществлять воздействие на информационное изделие цифровой карты местности, исключают дублирование и в итоге достигается требуемый результат, но с меньшими временными затратами, чем при применении известных способов. Этот эффект, достигаемый применением заявляемого способа, позволяет сделать вывод о его соответствии критерию "существенные отличия".
Введение указанных отличительных признаков позволило разработать новый способ построения расчетных зон затенения управляемым перебором квадратов цифровой карты местности, свободного от повторных вычислений при прохождении соседних лучей прямой видимости через одни и те же элементарные квадраты цифровой матрицы высот рельефа местности, получить сокращение времени на построение расчетных зон затенения, применяемых при организации управления системами сбора информации, и тем самым достичь цели изобретения.
Для примера и последующей оценки эффективности способа построения расчетных зон затенения управляемым перебором квадратов цифровой карты приводится последовательность, когда перебор квадратов осуществляется по секторам 1-8, равным 45 градусам от ближнего квадрата к дальнему по вертикали и от ближней вертикали к дальней по горизонтали.
Расположение секторов относительно объекта наблюдения V с координатами (а,b) представлено на Фиг.10. Область оценки зоны затенения в примере ограничена совокупностью квадратов с индексами в пределах: по горизонтали от с до d; по вертикали от е до g.
Последовательность перебора в секторах одна и та же. На примере сектора 1 квадраты выбираются следующим образом.
1. Создается дополнительная переменная w=0.
2. Задаются индексы начального квадрата i=а+1, j=h+w+2.
3. Последующие квадраты выбираются путем увеличения индекса j на единицу до тех пор, пока j≤е.
4. Значение i увеличивается на единицу.
5. Если i<d, значение w увеличивается на единицу, а значение индекса j=b+w+2, осуществляется переход к пункту 3, иначе процесс перебора квадратов в секторе прекращается.
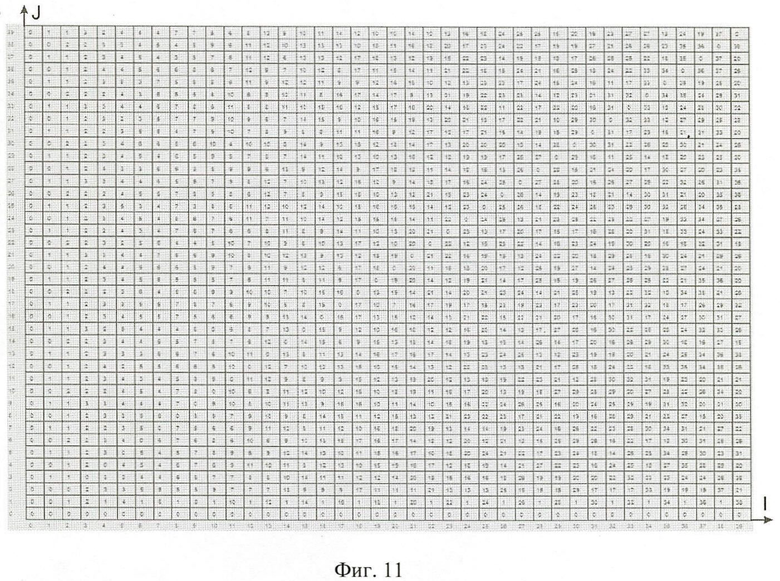
Для описанной выше последовательности перебора квадратов перед началом вычислений матрица управления вычислениями будет иметь вид, показанный на Фиг.11. Матрица хранения промежуточных результатов вычислений будет иметь аналогичные размеры, однако перед началом вычислений значения массива заполняются нулями.
В матрице управления вычислениями нулями обозначены квадраты, для которых при анализе среза рельефа местности вообще отсутствуют повторяющиеся последовательности. В этом случае управляющие воздействия сводятся к выбору начального квадрата на срезе рельефа местности. Исключение составляют диагонали, вертикали и горизонтали.
Если в квадрате записано число, отличное от нуля, то это значит, что данный квадрат уже имеет последовательность, которая при выбранном способе перебора ранее уже рассматривалась и имеет значение угла закрытия δ. Данное значение ранее, после анализа последовательности, было помещено в матрицу хранения промежуточных результатов вычислений.
Индексы квадрата, который является последним в ранее рассмотренной последовательности наибольшей продолжительности, а также значение угла закрытия δ определяется параметрами матрицы управления вычислениями.
Порядок определения индексов
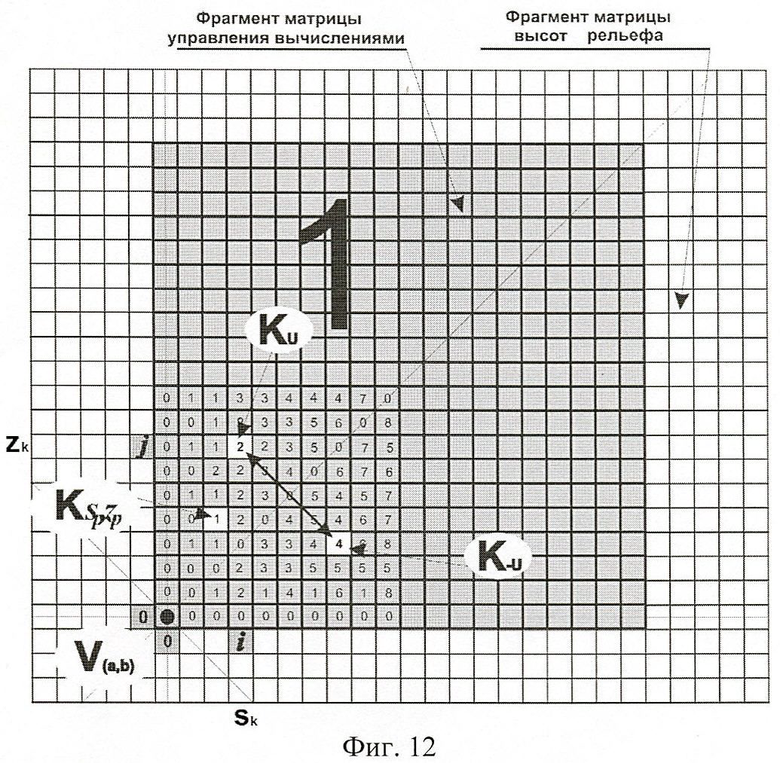
Начальное значение (0,0) совмещается с квадратом (a,b) матрицы высот рельефа, в котором располагается объект наблюдения, Фиг 12.
Очередному выбранному квадрату (sk,zk) матрицы высот рельефа в этом случае соответствует квадрат КU с координатами (i,j), а также симметричный квадрат К-U с координатами (j,i) матрицы управления вычислениями. При этом для данных условий i=sk-a-1, j=zk-b-1.
Индексы (х,у) квадрата Kδ матрицы хранения промежуточных результатов вычислений, в котором хранится значение угла закрытия δ последовательности наибольшей продолжительности для рассматриваемого квадрата, определяются как:


таким образом,

Индексы (sp,zp) квадрата матрицы высот рельефа, который является последним в последовательности наибольшей продолжительности, получаются с учетом проведенных выше вычислений как:


Очевидно, что изобретение не ограничивается вышеописанным примером его осуществления, исходя из него могут быть предусмотрены и другие варианты, не выходящие за рамки предмета изобретения, например выбор другой последовательности перебора квадратов и построение для нее матрицы управления вычислениями.
Реализация предложенного способа технических трудностей не представляет и может быть выполнена на существующих типах ЭВМ.
Технико-экономическая оценка эффективности предлагаемого способа по сравнению с прототипом и другими известными способами проводилась экспериментальным методом. Алгоритм работы был реализован на ЭВМ.
Исследования показали, что применение предлагаемого способа по сравнению с прототипом позволяет в 2-5 раз сократить время построения расчетных зон затенения.
Источники информации
1. Шишкин А.В., Боресков А.В. Компьютерная графика. Полигонные модели. М.: ДИАЛОГ-МИФИ, 2000. - 464 с.
2. Сети мобильной связи. Частотно-территориальное планирование. Учебное пособие для вузов. / В.Ю.Бабков, М.А.Вознюк, П.А.Михайлов. - 2-е изд., испр. - М.: Горячая линия - Телеком, 2007. - 224 с.: ил.
3. ГОСТ 21667-76. Картография.
4. ГОСТ 28441-90. Картография цифровая.
5. ГОСТ Р 50828-95. Геоинформационное картографирование. Пространственные данные, цифровые и электронные карты. Общие требования.
6. ГОСТ 51605-2000. Карты цифровые топографические. Общие требования.
7. ГОСТ 51606-2000. Карты цифровые топографические. Система классификации и кодирования цифровой картографической информации. Общие требования.
8. ГОСТ 51607-2000. Карты цифровые топографические. Правила цифрового описания картографической информации. Общие требования.
9. Положение по информационному картографическому обеспечению топографической службы ВС РФ. - М.: ВТУ ГШ, 2001.
10. ГОСТ Р 52055-2003. Геоинформационное картографирование. Пространственные модели местности. Общие требования.
11. Справочник по радиорелейной связи. Каменский Н.Н., Модель A.M., Надененко Б.С. и др. Под ред. С.В.Бородича. - Изд-е 2-е, перераб. и доп. - М.: Радио и связь, 1981. - 416 с., ил.
12. Сети телевизионного и звукового ОВЧ ЧМ-вещания: Справочник / М.Г.Локшин, А.А.Шур, А.В.Кокорев, Р.А.Краснощеков. - М.: Радио и связь, 1988.
13. Буга Н.Н. и др. Электромагнитная совместимость радиоэлектронных средств: Учебное пособие для вузов. / Н.Н.Буга, В.Я.Конторович, В.И.Носов. Под ред. Н.Н.Буги. - М.: Радио и связь, 1993.
14. Рекомендация ITU-R Р.370-7. Графики распространения сигналов диапазона ОВЧ и УВЧ на частотах 30-1000 МГц.
15. Рекомендация ITU-R Р.529-2. Методы прогнозирования для наземных сухопутных мобильных радиослужб в диапазонах ОВЧ и УВЧ.
16. Рекомендация ITU-R PN.833-1. Ослабление растительностью.
17. Рекомендация ITU-R P.526-5. Распространение при дифракции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2680969C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2515469C1 |
| СПОСОБ ПОСТРОЕНИЯ ПЕРСПЕКТИВНЫХ КАРТ МЕСТНОСТИ (ВАРИАНТЫ) | 2012 |
|
RU2485593C1 |
| СПОСОБ НАЗЕМНОЙ ГРАВИРАЗВЕДКИ | 1993 |
|
RU2064684C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2426073C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2008 |
|
RU2385468C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| СПОСОБ КОМПЛЕКСНОГО ПРИМЕНЕНИЯ ЗЕНИТНО-РАКЕТНОГО ВООРУЖЕНИЯ СО СРЕДСТВАМИ ВНЕШНЕГО ЦЕЛЕУКАЗАНИЯ | 2023 |
|
RU2830505C1 |
| СПОСОБ КАРТОГРАФИРОВАНИЯ ЛЕДНИКОВОЙ ГЕОМОРФОЛОГИИ | 2014 |
|
RU2570334C1 |
Изобретение относится к средствам построения цифровой карты местности. Техническим результатом является сокращение времени построения расчетных зон затенения на цифровой карте местности. В способе формируют зоны затенения путем обработки данных матрицы управления вычислениями, полученных и распределенных по позициям матрицы до начала построения расчетных зон затенения. Для реализации способа до начала обработки информации создают цифровой блок управления, состоящий из матрицы управления вычислениями и матрицы хранения промежуточных результатов вычислений. 12 ил.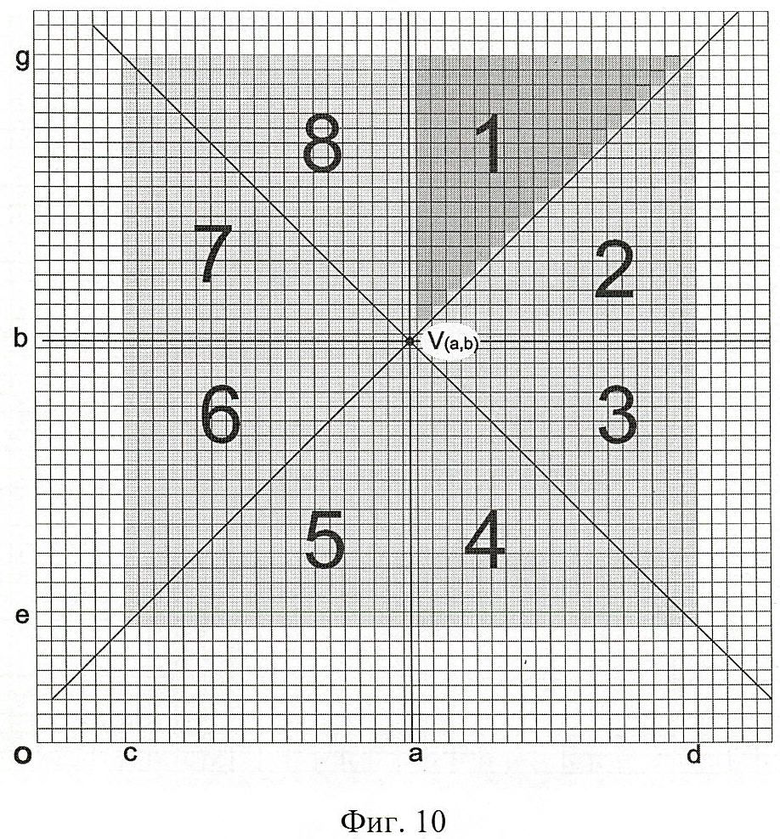
Способ построения расчетных зон затенения управляемым перебором элементов матрицы высот рельефа, в котором предметом воздействия принята цифровая карта местности, свойства которой изменяются за счет введения в нее расчетных зон затенения, характеризующих возможность видимости удаленных объектов из заданной точки наблюдения, создаваемых на основе высот рельефа местности, усредненных на площади квадрата, выбранного в качестве минимальной дискретной единицы измерения перепада высот, сведенных в матрицу, привязанную к координатной сетке применяемой системы координат и позволяющую по координатам точки на карте выбирать конкретное значение усредненной высоты из двумерного массива матрицы высот, точки стояния объекта, превышения объекта наблюдения над уровнем рельефа и превышения наблюдаемых объектов над уровнем рельефа, и который в отличии от известных способов формирует указанные зоны затенения путем обработки данных матрицы управления вычислениями, полученных и распределенных по позициям матрицы до начала построения расчетных зон затенения, позволяет при воздействии на информационное изделие цифровой карты местности вычисления заменить выбором данных, исключить дублирование и в итоге достичь существенного сокращения времени на построение расчетных зон затенения, применяемых при организации автоматизированного управления системами сбора информации.
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| JP 2010068719 A, 02.04.2010 | |||
| TW 201000934 A, 01.01.2010. | |||

