Область техники
Настоящее изобретение относится к комплексу машин для уборки урожая, содержащему сельскохозяйственную уборочную машину и транспортное средство, а также к способу регулирования скорости такого комплекса машин.
Уровень техники
Сельскохозяйственные уборочные машины, такие как полевые измельчители или зерноуборочные комбайны, которые принимают и обрабатывают убираемую массу, обычно содержат поворотные устройства для перегрузки убранной массы на транспортное средство, которое может быть, например, прицепом к трактору или грузовым автомобилем. В зависимости от вида уборочной машины перегрузка может производиться непрерывно или периодически, причем в большинстве случаев для оптимизации процесса по времени убранная масса перегружается во время движения уборочной машины. При этом подаваемая поворотным перегрузочным устройством убранная масса падает на транспортное средство в точку падения. Поворот перегрузочного устройства для перегрузки убранной массы может производиться вручную оператором или автоматически системой управления. При этом перегрузочное устройство может поворачиваться таким образом, что положение точки падения изменяется, чтобы как можно более полно использовать имеющийся транспортный объем транспортного средства. Для того, чтобы снизить до минимума потери убранной массы и эффективно использовать грузовой объем транспортного средства, необходимо, чтобы оператор уборочной машины был сконцентрирован на управлении перегрузочным устройством во время дальнейшего движения через убираемую растительность, что дополнительно увеличивает его рабочую нагрузку.
Из патентного документа ЕР 2020174 А1 известно устройство для перегрузки убранной массы из сельскохозяйственной уборочной машины в транспортное средство, которое должно освобождать оператора от нагрузки путем автоматического управления перегрузочным устройством. При этом сельскохозяйственная рабочая машина оснащена разгрузочной трубой для транспортирования собранной и обработанной массы, для управления направлением которой предусмотрено электрооптическое устройство, которое помимо разгрузки оператора должно обеспечивать возможность эффективного заполнения транспортного средства. Однако это устройство также требует от оператора наблюдения, так как при автоматическом повороте перегрузочного устройства могут происходить нарушения, например, при столкновении перегрузочного устройства с транспортным средством. Кроме того, при повороте перегрузочное устройство может выходить из поля прямого обзора оператора, что затрудняет наблюдение за процессом перегрузки и требует вмешательства оператора.
Из патентного документа ЕР 2100495 А1 известна другая сельскохозяйственная уборочная машина для приема и обработки убранной массы, которая снабжена поворотным вокруг горизонтальной и вертикальной осей перегрузочным устройством для перегрузки убранной массы на транспортное средство. При работе машины в зависимости от различных эксплуатационных критериев уборочной машины перегрузочное устройство поворачивается вручную и/или автоматически противоположно направлению движения уборочной машины, причем эксплуатационными параметрами могут быть, например, скорость движения уборочной машины, количество проходящей через машину убранной массы и/или угол поворота уборочной машины. При этом, в частности, при движении на краю поля или при проходе участков без растительности должна обеспечиваться перегрузка без потерь. Автоматически поворачиваемое перегрузочное устройство также требует большого внимания оператора для своевременного вмешательства при возможных помехах или для предотвращения поворота с выходом из прямого поля зрения оператора.
Раскрытие изобретения
Соответственно, задачей настоящего изобретения является создание комплекса машин для уборки урожая и способа уборки, которые позволяют улучшить управление перегрузочным устройством сельскохозяйственной уборочной машины и снизить рабочую нагрузку оператора сельскохозяйственной уборочной машины.
Решение поставленной задачи обеспечивается за счет отличительных признаков пунктов 1 и 11 формулы изобретения. Предпочтительные примеры осуществления и решения по развитию изобретения будут ясны из зависимых пунктов формулы изобретения и последующего описания.
Комплекс машин для уборки урожая в соответствии с изобретением содержит выдающую убранную массу сельскохозяйственную уборочную машину с перегрузочным устройством, которое выполнено с возможностью поворота на угол поворота для перегрузки убранной массы, причем обеспечена возможность настройки заданного угла поворота для выдачи убранной массы настраиваться; и принимающее убранную массу транспортное средство, причем обеспечено падение убранной массы, выдаваемой сельскохозяйственной уборочной машиной, на транспортное средство в устанавливаемую точку падения, при этом при положении отклонения перегрузочного устройства от заданного угла поворота обеспечена возможность регулирования возвращения перегрузочного устройства на заданный угол поворота путем изменения скорости сельскохозяйственной уборочной машины и/или скорости транспортного средства, при этом положение точки падения остается по существу неизменным.
За счет изменения скорости сельскохозяйственной уборочной машины и/или скорости транспортного средства во время перегрузки уборочная машина и транспортное средство могут быть приведены в такое положение относительно друг друга, что повернутое перегрузочное устройство может быть снова повернуто в положение заданного угла поворота. При этом заданный угол поворота может быть выбран таким образом, что перегрузочное устройство расположено в поле прямого обзора оператора уборочной машины и/или что во избежание столкновения с транспортным средством перегрузочное устройство отстоит от него на наибольшее вертикальное расстояние. Преимущество состоит в том, что возвращение перегрузочного устройства на заданный угол поворота может осуществляться во время перегрузки убранной массы по существу при сохранении установленной точки падения, что упрощает наблюдение оператора за процессом перегрузки и может снижать его рабочую нагрузку. Кроме того, может быть снижена опасность столкновения перегрузочного устройства с транспортным средством при повороте перегрузочного устройства, например, при изменении точки падения, что может дополнительно снижать потребность в наблюдении оператором и его рабочую нагрузку.
В решении по развитию изобретения в зависимости от угла поворота изменяется расстояние от выдающего убранную массу свободного конца перегрузочного устройства до поверхности почвы. Выдающий убранную массу свободный конец расположен на дальнем от уборочной машины конце перегрузочного устройства. При этом расстояние является расстоянием между свободным концом и плоской поверхностью почвы, настраиваемым в зависимости от угла поворота перегрузочного устройства, при этом при повороте уборочная машина расположена по существу горизонтально на плоской поверхности. Изменение расстояния в зависимости от угла поворота может иметь место, например, в уборочной машине в виде комбайна, перегрузочное устройство которого выполнено с возможностью поворота вокруг не вертикально расположенной оси. В этом случае при повороте перегрузочного устройства свободный конец может перемещаться, например, по криволинейной траектории с переменным расстоянием от поверхности почвы. Путем изменения расстояния в зависимости от угла поворота перегрузочного устройства расстояние от свободного конца, в частности, до поверхности почвы может быть прямо выведено из угла поворота.
Предпочтительно заданный угол поворота выбирают и настраивают таким образом, что при заданном угле поворота свободный конец перегрузочного устройства отстоит на наибольшее расстояние от поверхности почвы. Преимущество состоит в том, что свободный конец отстоит на наибольшее расстояние также и от находящегося под ним транспортного средства, благодаря чему может предотвращаться случайное столкновение перегрузочного устройства с транспортным средством, например, при изменении точки падения.
В предпочтительном примере выполнения возвращение перегрузочного устройства на заданный угол поворота осуществляется посредством автоматического регулирования. Комплекс машин для уборки урожая, в частности, уборочная машина, может содержать, по меньшей мере, одно выполненное с возможностью автоматического регулирования возвращения устройство обработки данных и управления, с помощью которого может регулироваться скорость уборочной машины и/или транспортного средства. Автоматическое возвращение перегрузочного устройства дает то преимущество, что оператор не должен выполнять его вручную, и это дополнительно снижает его рабочую нагрузку.
Предпочтительно точка падения убранной массы может быть установлена вручную и/или автоматически. Это обеспечивает как возможность эффективного автоматического заполнения транспортного средства, что освобождает оператора от нагрузки, так и возможность ручного вмешательства оператора, например, для целенаправленного заполнения областей транспортного средства вблизи бортов.
За счет того, что перегрузочное устройство автоматически дополнительно регулируется для наведения на установленную точку падения, оператор также освобождается от нагрузки. Кроме того, автоматическая установка и/или следование за точкой падения убранной массы позволяет использовать стратегию перегрузки при заполнении транспортного средства, например, в зависимости от его вида.
В следующем предпочтительном примере выполнения изобретения оператором может выбираться, по меньшей мере, одно транспортное средство, которое используется для возвращения перегрузочного устройства и выполнено регулируемым по скорости. При этом оператор может выбирать, по меньшей мере, одно транспортное средство, то есть сельскохозяйственную уборочную машину, транспортное средство или оба транспортных средства, которые могут использоваться для возвращения перегрузочного устройства и являются регулируемыми по скорости. При этом оператор может выбирать, по меньшей мере, одно транспортное средство, то есть сельскохозяйственную уборочную машину, транспортное средство или оба транспортных средства, скорость которых может регулироваться для возвращения перегрузочного устройства на заданный угол поворота. Преимущество состоит в том, что, в частности, при автоматическом регулировании возвращения оператор имеет возможность вводить задание, например, в зависимости от того, какими устройствами обработки данных и управления оснащены уборочная машина и/или транспортное средство. Далее, оператор может выбрать для возвращения регулирование скорости только транспортного средства, так что во время перегрузки уборочная машина может продолжать уборку с высокой скоростью, что дополнительно повышает производительность.
В предпочтительном примере выполнения изобретения предусмотрено, по меньшей мере, одно устройство обработки данных и управления для управления перегрузочным устройством и скоростью уборочной машины и/или транспортного средства, причем обеспечена возможность регулирования скорости уборочной машины и/или скорости транспортного средства, по меньшей мере, одним устройством обработки данных и управления в зависимости от отклонения перегрузочного устройства. Устройство обработки данных и управления может управлять поворотом перегрузочного устройства, например, для выдерживания настроенной точки падения или при возвращении перегрузочного устройства. Предпочтительно точка падения может определяться и настраиваться устройством обработки данных и управления, например, на основе стратегии перегрузки. Для возвращения перегрузочного устройства на заданный угол поворота устройство может регулировать скорость уборочной машины и/или транспортного средства обработки данных и управления в зависимости от угла поворота. По меньшей мере, одно устройство обработки данных и управления может быть расположено на уборочной машине и/или на транспортном средстве. Несколько устройств обработки данных и управления могут быть снабжены модулями связи для беспроводной связи и односторонней и/или двухсторонней передачи данных, в частности, данных о подлежащей регулированию скорости соответствующих транспортных средств. По меньшей мере, одно устройство обработки данных и управления имеет то преимущество, что может осуществляться в значительной мере автоматизированное управление перегрузочным устройством и скоростями для возвращения перегрузочного устройства, в результате чего может быть снижена рабочая нагрузка оператора.
В предпочтительном примере выполнения изобретения предусмотрен датчик для определения угла поворота и/или отклонения перегрузочного устройства. Датчик может представлять собой электрооптическое устройство, например, в виде стереокамеры. С помощью датчика может измеряться действительный угол поворота относительно продольной оси уборочной машины и/или относительно убранного внутрь нерабочего положения перегрузочного устройства. Электрооптическое устройство позволяет бесконтактным способом определять действительный угол поворота и/или предпринятое отклонение на определенный угол, например, при повороте перегрузочного устройства от первой точки падения ко второй точке падения. Кроме того, электрооптическое устройство, в области восприятия которого лежит первая действительная точка падения и подлежащая следованию к ней вторая точка падения, может определять необходимое изменение угла поворота уже перед поворотом или в его ходе. Преимущество состоит в том, что изменение скорости для возвращения перегрузочного устройства может производиться близко по времени, в частности, одновременно с поворотом перегрузочного устройства от первой точки падения ко второй. Кроме того, уже имеющийся в комплексе машин электрооптический датчик может использоваться для регулирования скорости с экономией затрат.
Изобретение относится также к способу регулирования скорости комплекса машин для уборки урожая, содержащего выдающую убранную массу сельскохозяйственную уборочную машину с перегрузочным устройством, которое может поворачиваться на угол поворота для перегрузки убранной массы, и транспортное средство, принимающее убранную массу в точке падения, в соответствии с которым настраивают заданный угол поворота и точку падения для выдачи убранной массы и при отклонении перегрузочного устройства от заданного угла поворота регулируют возвращение перегрузочного устройства на заданный угол поворота по существу при неизменном положении точки падения путем изменения скорости сельскохозяйственной уборочной машины и/или скорости транспортного средства. Преимущество состоит в том, что обеспечивается возможность возвращения повернутого перегрузочного устройства на заданный угол поворота в ходе перегрузки убранной массы по существу при сохранении настроенной точки падения. Благодаря этому перегрузочное устройство может быть приведено в положение легкого, в частности, прямого наблюдения оператора, что может снижать рабочую нагрузку оператора. Кроме того, создается преимущество в том, что может быть снижена опасность столкновения перегрузочного устройства с транспортным средством при повороте перегрузочного устройства, например, при изменении точки падения, что может дополнительно снижать потребность в наблюдении оператором и его рабочую нагрузку.
В следующем примере осуществления изобретения в зависимости от угла поворота может изменяться расстояние от выдающего убранную массу свободного конца перегрузочного устройства до поверхности почвы. Изменение расстояния в зависимости от угла поворота может достигаться, например, путем поворота перегрузочного устройства вокруг отдельной, расположенной не вертикально оси поворота, как это может быть в случае выполнения уборочной машины в виде зерноуборочного комбайна. Вертикальная ось поворота расположена перпендикулярно поверхности почвы. За счет изменения расстояния в зависимости от угла поворота перегрузочного устройства расстояние от свободного конца до поверхности почвы может быть прямо выведено из угла поворота.
Предпочтительно заданный угол поворота настраивают таким образом, что свободный конец перегрузочного устройства при заданном угле поворота отстоит на наибольшее расстояние от поверхности почвы. Преимущество состоит в том, что свободный конец отстоит на наибольшее расстояние также и от находящегося под ним транспортного средства, благодаря чему может предотвращаться случайное столкновение перегрузочного устройства с транспортным средством.
Особенно предпочтительно возвращение отклоненного перегрузочного устройства на заданный угол поворота автоматически регулируют по существу при неизменном положении точки падения. Автоматическое возвращение перегрузочного устройства дает то преимущество, что оператор не должен выполнять его вручную, и это дополнительно снижает его рабочую нагрузку.
В следующем предпочтительном примере осуществления точку падения и/или отклонение перегрузочного устройства устанавливают вручную или автоматически. Автоматическое определение и установка точки падения и/или отклонения перегрузочного устройства обеспечивает возможность эффективного автоматического заполнения транспортного средства, что значительно освобождает оператора от нагрузки. Благодаря ручной установке точки падения и отклонения перегрузочного устройства создается возможность для оператора избирательно осуществлять вмешательство или полностью брать на себя управление, так что в ситуациях, которые могут восприниматься системой автоматического управления недостаточно надежно, может обеспечиваться надежная и эффективная перегрузка.
Краткий перечень чертежей
Другие особенности и преимущества изобретения будут ясны из последующего описания примеров осуществления со ссылками на прилагаемые чертежи.
На чертежах:
фиг. 1 схематично изображает на виде сверху комплекс машин для уборки урожая с сельскохозяйственной уборочной машиной и транспортным средством;
фиг. 2 схематично изображает на виде сбоку уборочную машину с перегрузочным устройством, показанным в различных положениях;
фиг. 3 изображает на виде сверху комплекс машин, показанный на фиг. 1;
фиг. 4 изображает на виде сверху комплекс машин по фиг. 3 с перегрузочным устройством, расположенным с заданным углом поворота.
Осуществление изобретения
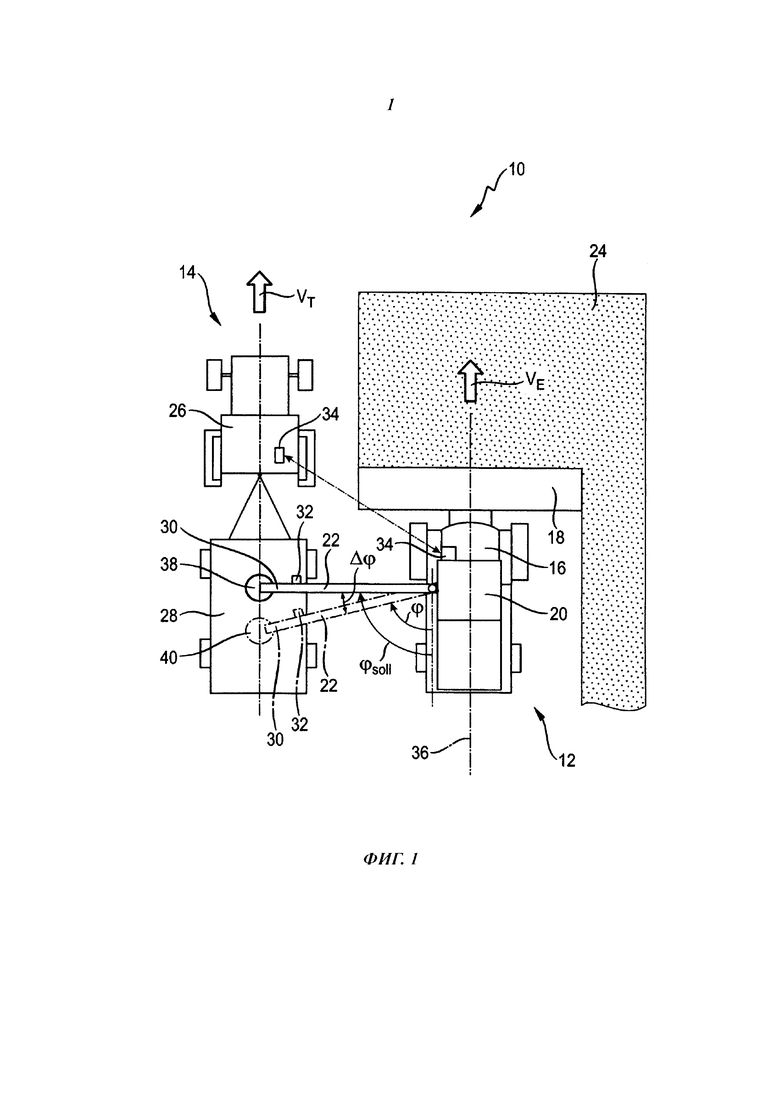
На фиг. 1 показан на виде сверху комплекс 10 машин для уборки урожая, который содержит сельскохозяйственную уборочную машину 12 и транспортное средство 14 и находится на поле в процессе уборки урожая. Показанная сельскохозяйственная уборочная машина 12 выполнена в виде зерноуборочного комбайна 16, базовая конструкция которого известна специалисту в данной области, так что здесь не приводится описания его обычных конструктивных узлов, таких как сменный аппарат 18, молотильный аппарат, очистное устройство, зерновой бункер 20 и перегрузочное устройство 22. Сменный аппарат 18 принимает убранную массу 24, по меньшей мере, часть которой после обработки попадает в зерновой бункер 20. Убранной массой 24 может быть, например, пшеница, причем после обработки обмолоченные зерна пшеницы могут собираться в зерновом бункере 20. В зависимости от убираемой массы 24 может быть выбран и установлен другой сменный аппарат 18. Из зернового бункера 20 комбайна 16 убранная масса 24 может периодически через интервалы времени перегружаться на транспортное средство 14 с помощью перегрузочного устройства 22. При этом транспортное средство 14 может быть, например, грузовым автомобилем или, как это показано здесь, трактором 26 с прицепом 28. В контексте изобретения сельскохозяйственная уборочная машина 12 может быть любой самоходной или прицепной сельскохозяйственной уборочной машиной, которая принимает и выдает убранную массу 24, - такой как полевой измельчитель или показанный зерноуборочный комбайн 16.
Перегрузочное устройство 22 комбайна 16 установлено с возможностью поворота, по меньшей мере, вокруг одной оси 23 поворота. Для перегрузки убранной массы 24 перегрузочное устройство 22 поворачивают вокруг оси 23 поворота из нерабочего положения в рабочее, причем перегрузочное устройство 22 в рабочем положении расположено под углом ϕ поворота к продольной оси 36 уборочной машины 12, при этом в рабочем положении перегрузочного устройства 22 величина угла ϕ поворота больше 0°. Действительный угол ϕ поворота перегрузочного устройства 22 обозначен как ϕist.
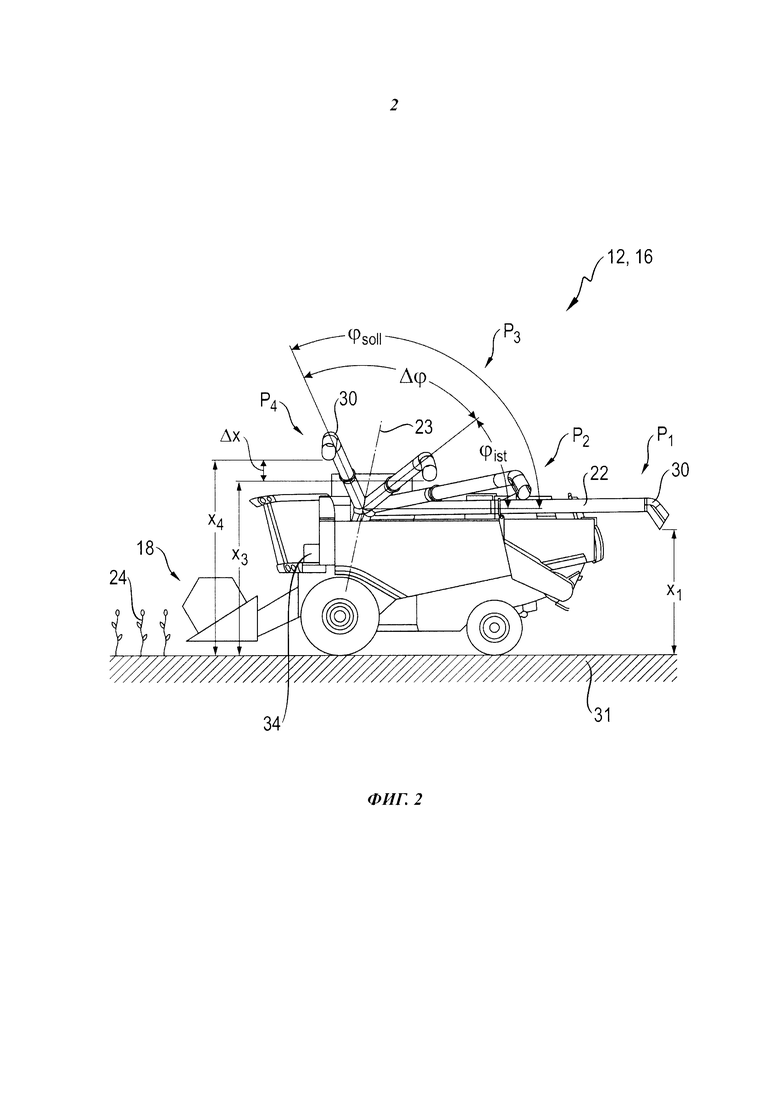
Комбайны 16 (фиг. 2) обычно оснащены только одним перегрузочным устройством 22, которое поворачивается вокруг оси 23 поворота, причем ось 23 поворота может быть расположена наклонно относительно уборочной машины 12 и/или поверхности 31 почвы. В показанном на фиг. 2 комбайне 16 ось 23 поворота наклонена относительно вертикали, так что перегрузочное устройство 22 перемещается по круговой траектории, наклоненной соответствующим образом. За счет наклона круговой траектории при повороте перегрузочного устройства 22 его свободный конец 30 перемещается, например, по криволинейной траектории относительно поверхности 31 почвы, причем расстояние x от свободного конца 30 до поверхности 31 почвы изменяется в зависимости от угла ϕ поворота.
Перегрузочное устройство 22 представлено в четырех различных положениях P1, P2, P3, P4. В первом положении P1, которое соответствует транспортному положению перегрузочного устройства 22, оно расположено по существу параллельно продольной оси 36, при этом угол ϕist поворота составляет по существу 0°. В транспортном положении P1 свободный конец 30 перегрузочного устройства 22, выдающий убранную массу 24, находится на расстоянии x1 от поверхности 31 почвы. Расстояние x1 может измеряться, например, от нижней кромки свободного конца 30 до поверхности 31 почвы.
Во втором, третьем и четвертом положениях P2, P3, P4 перегрузочное устройство 22 показано повернутым на соответствующий угол ϕ поворота относительно продольной оси 36. Во втором положении P2, а также особенно в третьем и четвертом положениях P3, P4 перегрузочное устройство 22 повернуто в рабочее положение для перегрузки убранной массы 24. При этом четвертое положение Р4 может быть особенно предпочтительным, заданным положением перегрузочного устройства 22 для перегрузки убранной массы 24. В этом заданном положении перегрузочного устройства 22 угол ϕ поворота соответствует заданному углу ϕsoll поворота.
Вследствие наклона оси 23 поворота перегрузочное устройство 22 также поворачивается по наклонной круговой траектории, так что при его повороте расстояние x между свободным концом 30 перегрузочного устройства 22 и поверхностью 31 почвы изменяется в зависимости от угла ϕ поворота. Так например, при повороте перегрузочного устройства 22 из четвертого, заданного положения P4 в третье положение P3 расстояние x между свободным концом 30 перегрузочного устройства 22 и поверхностью 31 почвы может уменьшаться, так что в четвертом положении P4 расстояние x4 между свободным концом 30 и почвой больше расстояния x3 в третьем положении P3. При этом изменение Δx расстояния соответствует разности расстояния x4 в четвертом положении P4 и расстояния x3 в третьем положении P3. При повороте из четвертого положения P4 в третье положение P3 перегрузочное устройство 22 поворачивается из заданного положения с заданным углом ϕsoll поворота в рабочее положение с действительным углом ϕist поворота. При этом изменение Δϕ угла поворота соответствует разности заданного угла ϕsoll поворота в четвертом положении P4 и действительного угла ϕist поворота в третьем положении P3, причем заданный угол ϕsoll поворота больше действительного угла ϕist поворота в третьем положении P3.
Поскольку при перегрузке убранной массы 24 транспортное средство 14 (фиг. 1) расположено под свободным концом 30 перегрузочного устройства 22 или, по меньшей мере, рядом с ним, при повороте перегрузочного устройства 22 происходит также изменение расстояния между свободным концом 30 и транспортным средством 14, что создает возможность столкновения между перегрузочным устройством 22 и транспортным средством 14, - например, столкновение с бортом транспортного средства 14. Кроме того, при повороте перегрузочного устройства 22, в частности, свободный конец 30 перегрузочного устройства 22 может выйти из поля прямого обзора оператора, что может затруднять наблюдение за процессом перегрузки. В поле прямого обзора оператор может без особых усилий видеть перегрузочное устройство 22, особенно его свободный конец 30, и наблюдать за ним, просто повернув голову. Для снижения риска столкновения перегрузочного устройства 22 с транспортным средством 14 или во избежание затрудненного наблюдения для перегрузки убранной массы 24 может настраиваться заданный угол ϕsoll поворота, при котором перегрузочное устройство, в частности, его свободный конец 30 имеет наибольшее возможное расстояние от поверхности 31 почвы, а следовательно и от транспортного средства 14 и/или находится в поле прямого обзора оператора. Регулируемый заданный угол ϕsoll поворота может быть также областью заданных углов, в которой должно находиться перегрузочное устройство 22, в частности, для перегрузки убранной массы 24.
Действительный угол ϕist поворота перегрузочного устройства 22 может быть измерен датчиком 32. Датчик 32 может быть выполнен в виде электрооптического устройства, например, в виде стереокамеры или камеры с измерением времени пролета, - так называемой времяпролетной камеры. Электрооптический датчик может быть расположен, например, на перегрузочном устройстве 22, в частности, в области свободного конца 30 и связан, по меньшей мере, с одним устройством 34 обработки данных и управления.
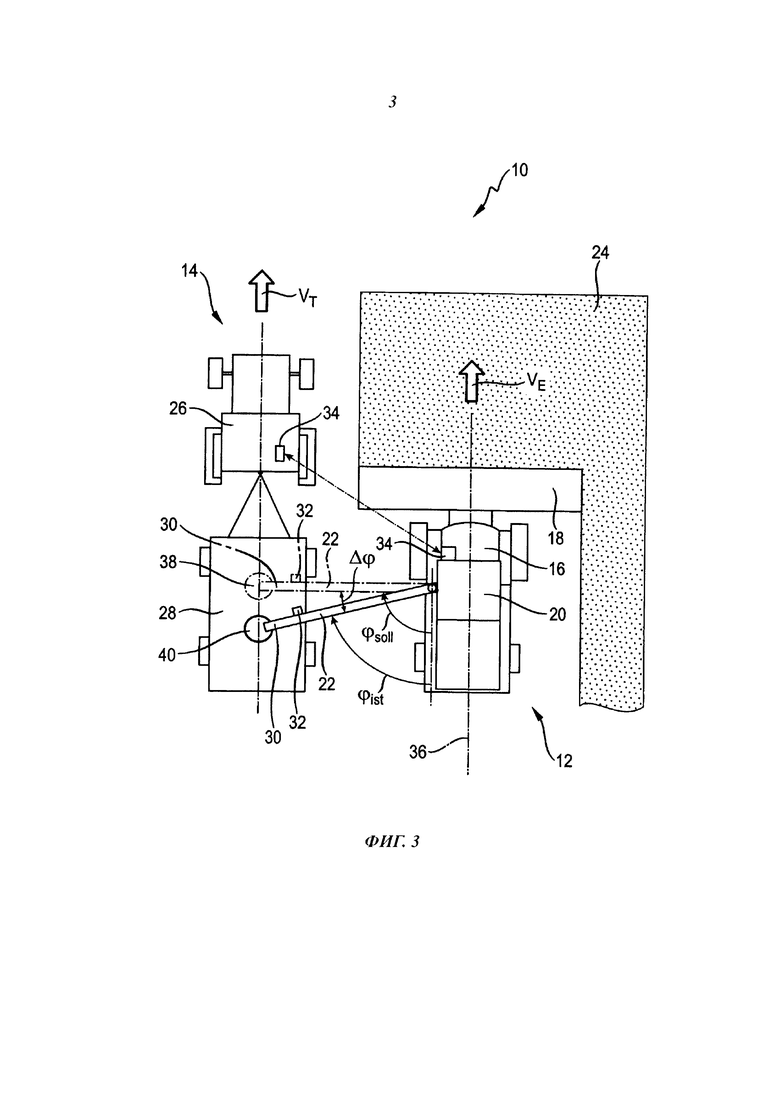
Показанная на фиг. 1 сельскохозяйственная уборочная машина 12 в виде зерноуборочного комбайна 16 перемещается со скоростью VE по убираемому полю и при этом своим сменным аппаратом 18 принимает убранную массу 24 для дальнейшей обработки. При этом скорость VE уборочной машины может автоматически регулироваться, например, по меньшей мере, одним устройством 34 обработки данных и управления. Кроме того, с помощью функции круиз-контроля скорость VE может поддерживаться по существу на регулируемой постоянной величине. Обработанная убранная масса 24 может запасаться в зерновом бункере 20 и перегружаться с помощью перегрузочного устройства 22 на прицеп 28. Перегрузочное устройство 22 уже повернуто в рабочее положение, причем оно находится под действительным ϕist углом поворота, который соответствует заданному углу ϕsoll поворота. При этом перегрузочное устройство 22 повернуто по существу перпендикулярно продольной оси 36 уборочной машины 12. При перегрузке убранная масса 24 падает на транспортное средство 14, - здесь в прицеп 28, - в первой точке 38 падения. В зависимости от имеющегося грузового объема транспортного средства 14 и количества перегружаемой или подлежащей перегрузке убранной массы 24 может потребоваться перевод перегрузки на вторую точку 40 падения. Для этого необходимо отклонение перегрузочного устройства на определенный угол. При этом отклонение перегрузочного устройства 22 соответствует разности Δϕ углов поворота, которая является разностью между углом ϕ поворота, относящимся к первой точке 38 падения, в частности, заданным углом ϕsoll поворота, и углом ϕ поворота, относящимся ко второй точке 40 падения, в частности, действительным углом ϕist поворота.
Отклонение и/или разность Δϕ углов поворота может быть определена с помощью датчика 32, в частности, электрооптического датчика. Датчик 32, который оптически воспринимает первую точку 38 падения и вторую точку 40 падения, может определять дистанцию между первой точкой 38 падения и второй точкой 40 падения и на основе длины перегрузочного устройства 22 определять отклонение и/или разность Δϕ углов поворота, которая необходима для поворота перегрузочного устройства 22 от первой точки 38 падения ко второй точке 40 падения. При этом подача убранной массы 24 может продолжаться непрерывно. Определение отклонения может выполняться также устройством 34 обработки данных и управления, связанным с датчиком 32.
Перегрузочное устройство 22, повернутое ко второй точке 40 падения, показано на фиг. 1 штрихпунктирными линиями, причем расстояние между свободным концом 30 и транспортным средством 14 уменьшилось, так как перегрузочное устройство 22 повернуто от заданного угла ϕsoll поворота с наибольшим возможным расстоянием между свободным концом 30 и поверхностью 31 почвы до действительного угла ϕist поворота с меньшим расстоянием между свободным концом 30 и поверхностью 31 почвы.
Для того чтобы представленное на фиг. 3 отклоненное перегрузочное устройство 22 снова перевести обратно на заданный угол ϕsoll поворота и в заданное положение с сохранением второй точки 40 падения, по меньшей мере, одно устройство 34 обработки данных и управления может отрегулировать скорость VE уборочной машины 12 и/или скорость VT транспортного средства 14 в зависимости от отклонения, то есть от разности Δϕ углов поворота между действительным углом ϕist поворота и заданным углом ϕsoll поворота перегрузочного устройства 22. По меньшей мере, одно устройство 34 обработки данных и управления может быть расположено на сельскохозяйственной уборочной машине 12. Для регулирования скорости VT транспортного средства 14, например, трактора 26, оно может быть оснащено дополнительным устройством 34 обработки данных и управления, причем дополнительное устройство 34 обработки данных и управления должно обеспечивать, по меньшей мере, возможность регулирования скорости VT транспортного средства 14. Несколько устройств 34 обработки данных и управления могут связываться друг с другом с помощью модулей связи (не показаны) беспроводным способом и обмениваться данными, в частности, для регулирования скорости.
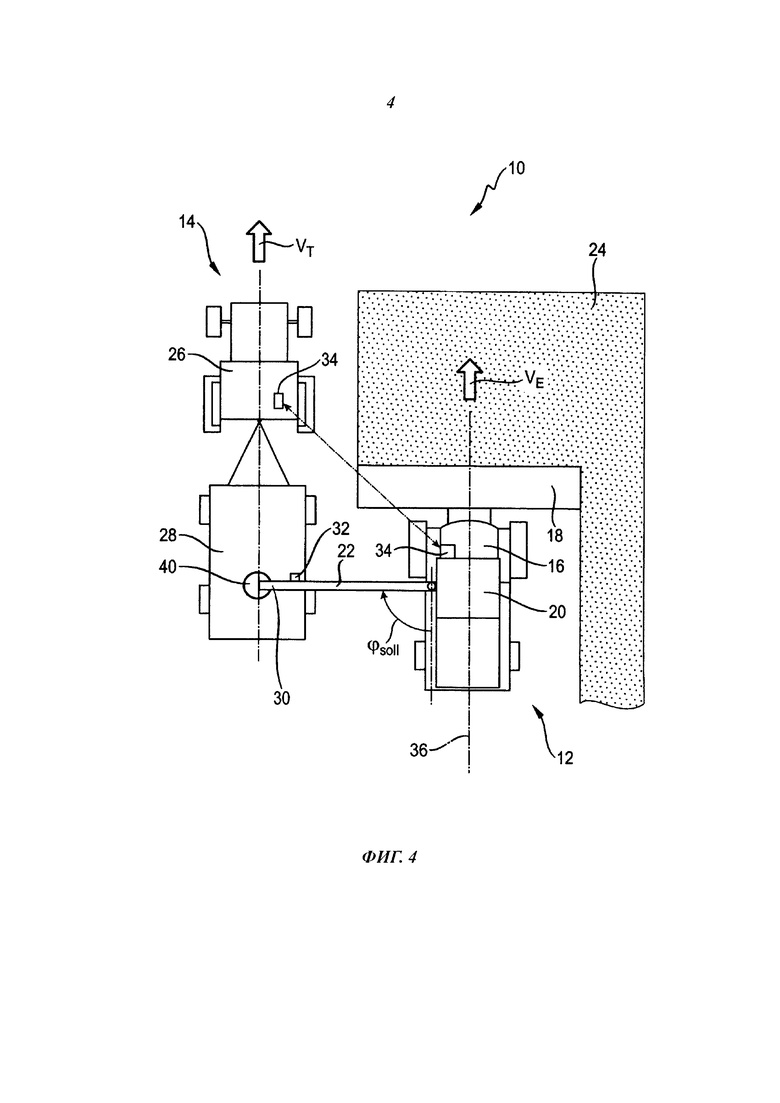
Для возвращения перегрузочного устройства 22 на заданный угол ϕsoll поворота может быть, например, временно снижена скорость VE до тех пор, пока перегрузочное устройство 22 не окажется вновь расположено под заданным углом ϕsoll поворота, причем убранная масса 24 также и в положении заданного угла ϕsoll поворота падает во вторую точку 40 падения (фиг. 4). Альтернативно скорость VT транспортного средства 14 может быть временно повышена до тех пор, пока перегрузочное устройство, которое остается направленным на вторую точку 40 падения, не перейдет в положение заданного угла ϕsoll поворота. Далее, возможно регулирование скоростей VE, VT обоих транспортных средств для возвращения перегрузочного устройства 22 в положение заданного угла ϕsoll поворота. При этом оператор может назначать, какое транспортное средство 12, 14 или какие транспортные средства 12, 14 должны регулироваться по скорости VE, VT для возвращения перегрузочного устройства 22. Благодаря этому оператор может выбирать, должны ли регулироваться по скорости уборочная машина 12, транспортное средство 14 или обе машины. Для того, чтобы как можно меньше оказывать влияние на производительность уборочной машины 12, например, посредством снижения скорости VE при перегрузке убранной массы 24, предпочтительно оставлять неизменной скорость VE уборочной машины 12 и регулировать только скорость VT транспортного средства 14. На фиг.4 показано перегрузочное устройство 22, направленное на вторую точку 40 падения и переведенное в положение заданного угла ϕsoll поворота, причем в данном случае действительный угол ϕist поворота соответствует заданному углу ϕsoll поворота. При этом в результате смещения точек 38, 40 падения навстречу направлению движения транспортное средство 14 сместилось дальше вперед относительно уборочной машины 12 по сравнению с положением при перегрузке в первую точку 38 падения с перегрузочным устройством, находящимся в положении заданного угла ϕsoll поворота.
Перечень позиций
10 Комплекс машин для уборки урожая
12 Сельскохозяйственная уборочная машина
14 Транспортное средство
16 Зерноуборочный комбайн
18 Сменный аппарат
20 Зерновой бункер
22 Перегрузочное устройство
23 Ось поворота
24 Убранная масса
26 Трактор
28 Прицеп
30 Свободный конец перегрузочного устройства
31 Поверхность почвы
32 Датчик
34 Устройство обработки данных и управления
36 Продольная ось
38 Первая точка падения
40 Вторая точка падения
P Положение
ϕ Угол поворота
Δϕ Разность углов поворота
ϕsoll Заданный угол поворота
ϕist Действительный угол поворота
x Расстояние
Δx Изменение расстояния
VE Скорость уборочной машины
VT Скорость транспортного средства
Группа изобретений относится к сельскохозяйственному машиностроению. Комплекс машин для уборки урожая содержит выдающую убранную массу сельскохозяйственную уборочную машину с перегрузочным устройством и принимающее убранную массу транспортное средство. Перегрузочное устройство может поворачиваться на угол (ϕ) поворота для перегрузки убранной массы. Заданный угол (ϕsoll) поворота для выдачи убранной массы может настраиваться. Выдаваемая сельскохозяйственной уборочной машиной убранная масса падает на транспортное средство в устанавливаемую точку падения. При положении отклонения перегрузочного устройства от заданного угла (ϕsoll) поворота возвращение перегрузочного устройства на заданный угол (ϕsoll) поворота может регулироваться путем изменения скорости (VE) сельскохозяйственной уборочной машины и/или скорости (VT) транспортного средства. Положение точки падения остается по существу неизменным. Группа изобретений обеспечивает эффективное управление перегрузочным устройством. 2 н. и 10 з.п. ф-лы, 4 ил.
1. Комплекс машин для уборки урожая, содержащий выдающую убранную массу (24) сельскохозяйственную уборочную машину (12) с перегрузочным устройством (22), которое выполнено с возможностью поворота на угол (ϕ) поворота для перегрузки убранной массы (24), причем обеспечена возможность настройки заданного угла (ϕsoll) поворота для выдачи убранной массы; и принимающее убранную массу (24) транспортное средство (14), причем обеспечено падение убранной массы (24), выдаваемой сельскохозяйственной уборочной машиной (12), на транспортное средство (14) в устанавливаемой точке (38, 40) падения,
отличающийся тем, что при положении отклонения перегрузочного устройства (22) от заданного угла (ϕsoll) поворота обеспечена возможность регулирования возвращения перегрузочного устройства (22) на заданный угол (ϕsoll) поворота путем изменения скорости (VE) сельскохозяйственной уборочной машины (12) и/или скорости (VT) транспортного средства (14), при этом положение точки (38, 40) падения остается по существу неизменным, при этом предусмотрено по меньшей мере одно устройство (34) обработки данных и управления для управления перегрузочным устройством (22) и скоростью (VE) уборочной машины (12) и/или скоростью (VT) транспортного средства (14), причем обеспечена возможность регулирования скорости (VE) уборочной машины (12) и/или скорости (VT) транспортного средства (14) по меньшей мере одним устройством (34) обработки данных и управления в зависимости от отклонения перегрузочного устройства (22), причем предусмотрен датчик (32) для определения угла (ϕ) поворота и/или отклонения перегрузочного устройства (22), и предусмотрена возможность автоматической установки точки (38, 40) падения убранной массы (24).
2. Комплекс машин по п. 1, отличающийся тем, что в зависимости от угла (ϕ) поворота изменяется расстояние (х) от выдающего убранную массу (24) свободного конца (30) перегрузочного устройства (22) до поверхности (31) почвы.
3. Комплекс машин по п. 1, отличающийся тем, что при заданном угле (ϕsoll) поворота свободный конец (30) перегрузочного устройства (22) отстоит на наибольшее расстояние (х) от поверхности (31) почвы.
4. Комплекс машин по п. 1, отличающийся тем, что предусмотрена возможность возвращения перегрузочного устройства на заданный угол (ϕsoll) поворота посредством автоматического регулирования.
5. Комплекс машин по п. 1, отличающийся тем, что перегрузочное устройство (22) выполнено с возможностью автоматической дополнительной регулировки для наведения на установленную точку (38, 40) падения.
6. Комплекс машин по п. 1, отличающийся тем, что предусмотрена возможность выбора оператором по меньшей мере одного транспортного средства (12, 14), которое может быть использовано для возвращения перегрузочного устройства (22) и выполнено регулируемым по скорости (VE, VT).
7. Комплекс машин по п. 1, отличающийся тем, что предусмотрена возможность определения и установки точки (38, 40) падения убранной массы (24) посредством устройства (34) обработки данных и управления.
8. Способ регулирования скорости комплекса (10) машин для уборки урожая, содержащего выдающую убранную массу (24) сельскохозяйственную уборочную машину (12) с перегрузочным устройством (22), выполненным с возможностью поворота на угол (ϕ) поворота для перегрузки убранной массы (24), и транспортное средство (14), принимающее убранную массу (24) в точке (38, 40) падения, в соответствии с которым
- настраивают заданный угол (ϕsoll) поворота и точку (38, 40) падения для выдачи убранной массы и
- при отклонении перегрузочного устройства (22) от заданного угла (ϕsoll) поворота регулируют возвращение перегрузочного устройства (22) на заданный угол (ϕsoll) поворота по существу при неизменном положении точки (38, 40) падения путем изменения скорости (VE) сельскохозяйственной уборочной машины (12) и/или скорости (VT) транспортного средства (14).
9. Способ по п. 8, отличающийся тем, что в зависимости от угла (ϕ) поворота может быть изменено расстояние (х) от выдающего убранную массу (24) свободного конца (30) перегрузочного устройства (22) до поверхности (31) почвы.
10. Способ по п. 8 или 9, отличающийся тем, что заданный угол (ϕsoll) поворота настраивают таким образом, что свободный конец (30) перегрузочного устройства (22) отстоит на наибольшее расстояние (х) от поверхности (31) почвы.
11. Способ по п. 8 или 9, отличающийся тем, что возвращение отклоненного перегрузочного устройства (22) на заданный угол (ϕsoll) поворота автоматически регулируют по существу при неизменном положении точки (38, 40) падения.
12. Способ по п. 8 или 9, отличающийся тем, что точку (38, 40) падения и/или отклонение перегрузочного устройства (22) устанавливают вручную или автоматически.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колесо для транспортного средства | 1988 |
|
SU1645178A1 |
| УСТРОЙСТВО ДЛЯ ОПТИМИЗАЦИИ ПЕРЕГРУЗКИ УБРАННОЙ МАССЫ НА СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2001 |
|
RU2282972C2 |
| УБОРОЧНАЯ СЕЛЬХОЗМАШИНА С ПЕРЕГРУЗОЧНЫМ УСТРОЙСТВОМ | 2009 |
|
RU2495558C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНЫМ АППАРАТОМ | 1999 |
|
RU2245611C2 |

