Изобретение относится к электротехнике, преимущественно к электрическим машинам и измерительной технике, и может быть использовано для цифрового управления асинхронным двигателем.
Известен способ определения оценки частоты вращения асинхронного двигателя [патент РФ 2385529, МПК8 H02P 21/14, H02P 23/14, опубл. 27.03.2010], выбранный в качестве прототипа, включающий измерение текущих значений напряжений и токов статора двигателя, прямое и косвенное вычисление значений реактивной мощности, пропорционально-интегральное преобразование разности этих значений в оценку частоты вращения двигателя, вычисление параметров пропорционально-интегрального преобразования на основе минимизации критерия, определяемого по сохраненным в памяти двум предыдущим значениям оценки частоты вращения и разности значений прямого и косвенного вычислений реактивной мощности.
Недостатком известного способа является то, что для его осуществления требуются технические данные двигателя.
Задачей изобретения является расширение арсенала средств аналогичного назначения.
Это достигается тем, что в способе определения оценки частоты вращения ротора асинхронного двигателя, так же как в прототипе, осуществляют измерение мгновенных величин токов и напряжений статора асинхронного двигателя.
Согласно изобретению одновременно проводят измерение мгновенных величин токов и напряжений на двух фазах статора, последовательно выполняют три временные задержки по крайней мере на 6 мс, получая текущие и задержанные единожды, дважды и трижды значения токов и напряжений двух фаз статора двигателя, с помощью искусственной нейронной сети, предварительно обученной по опытным данным работы электродвигателя во всех режимах, используя выявленные искусственной нейронной сетью при обучении зависимости между входными и выходными данными, определяют мгновенную величину оценки частоты вращения ротора асинхронного двигателя по формуле
 ,
,
где m = 80 - количество нейронов в скрытом слое,
n=17 - количество нейронов во входном слое,
w1ji - синаптический вес i-го входа j-го нейрона скрытого слоя,
w1j0 - сдвиг j-го нейрона скрытого слоя,
w2j - синаптический вес j-го входа нейрона выходного слоя,
w20 - сдвиг нейрона выходного слоя,
xi - входные сигналы искусственной нейронной сети, равные соответственно iA(k), iA(k-1), iA(k-2), iA(k-3), iB(k), iB(k-1), iB(k-2), iB(k-3), uA(k), uA(k-1), uA(k-2), uA(k-3), uB(k), uB(k-1), uB(k-2), uB(k-3),  ,
,
задержанную по крайней мере на 6 мс мгновенную величину оценки частоты вращения ротора асинхронного двигателя используют в качестве обратной связи.
На фиг.1 приведена схема устройства, реализующего рассматриваемый способ определения оценки частоты вращения асинхронного двигателя.
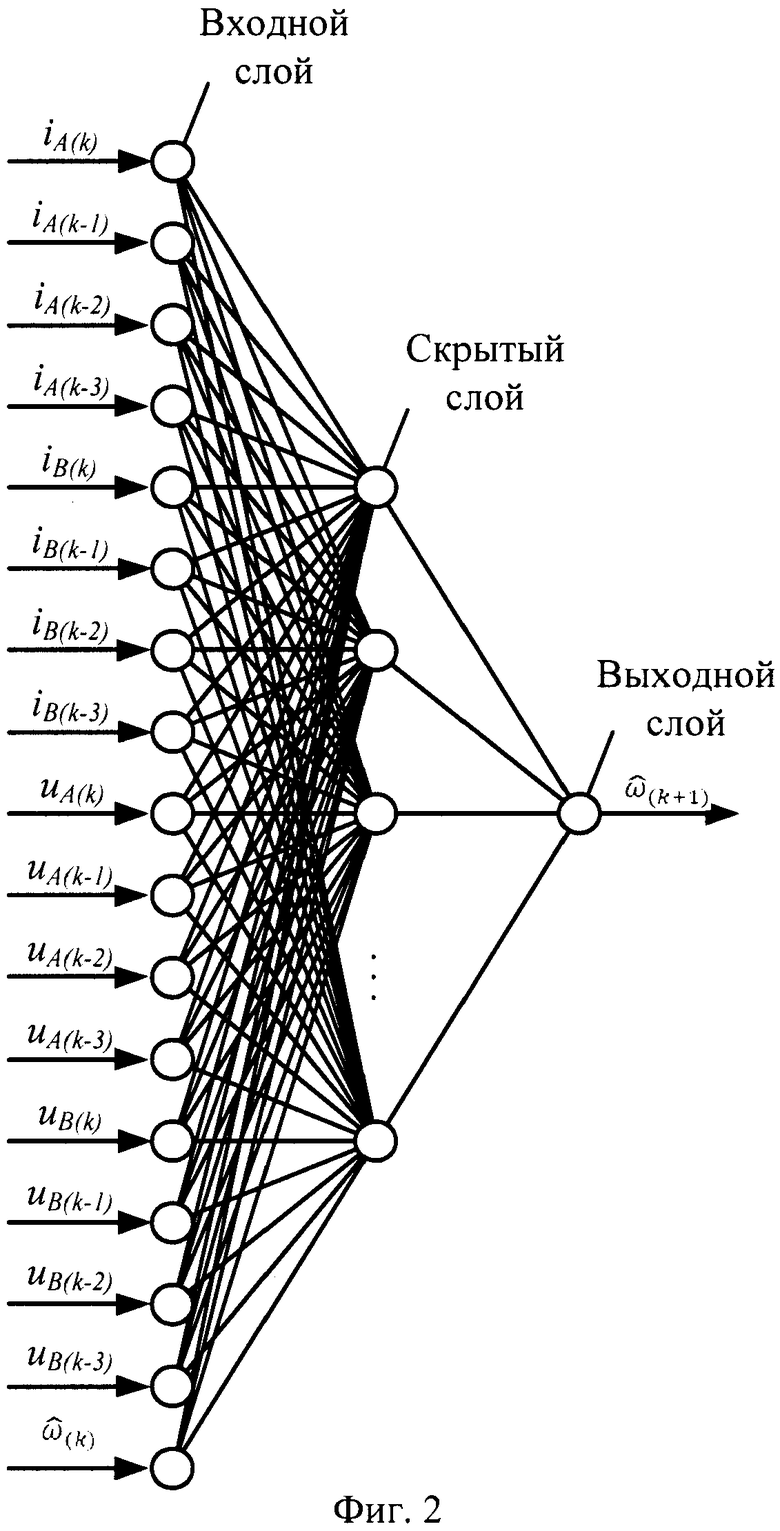
На фиг.2 приведена структура искусственной нейронной сети.
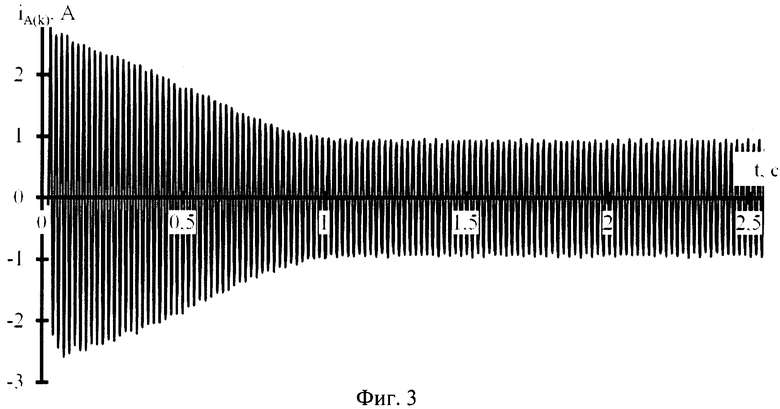
На фиг.3 приведена осциллограмма тока фазы A питания асинхронного двигателя.
На фиг.4 приведена осциллограмма тока фазы B питания асинхронного двигателя.
На фиг.5 приведена осциллограмма напряжения фазы A питания асинхронного двигателя.
На фиг.6 приведена осциллограмма напряжения фазы B питания асинхронного двигателя.
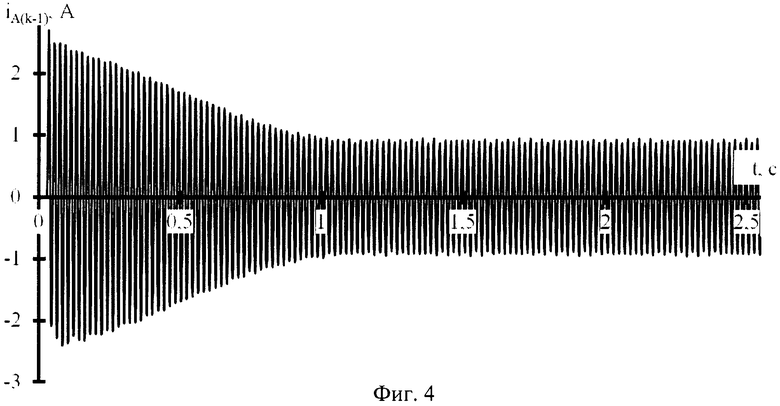
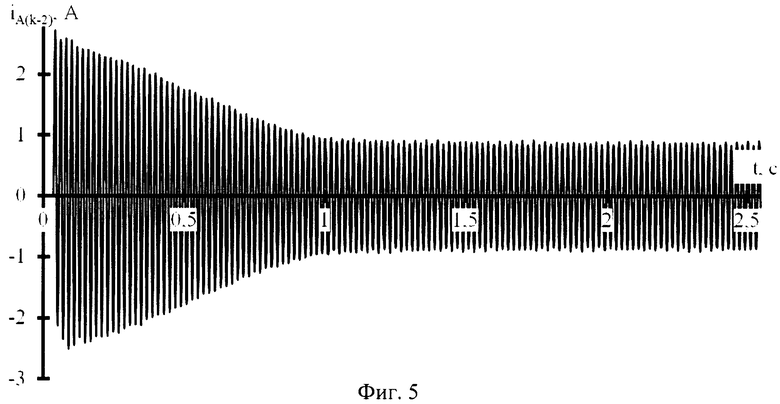
На фиг.7 приведена осциллограмма единожды задержанного тока фазы А питания асинхронного двигателя.
На фиг.8 приведена осциллограмма дважды задержанного тока фазы А питания асинхронного двигателя.
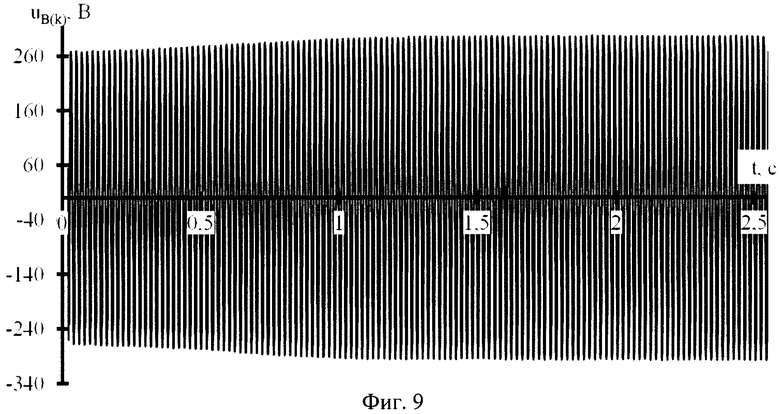
На фиг.9 приведена осциллограмма трижды задержанного тока фазы А питания асинхронного двигателя.
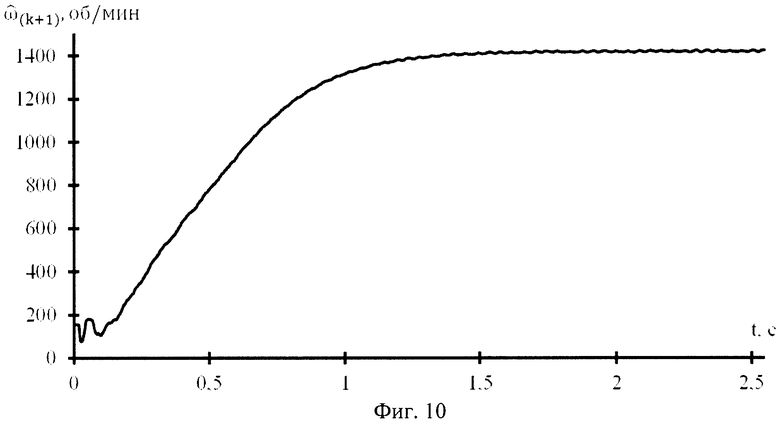
На фиг.10 приведена оценка частоты вращения асинхронного двигателя.
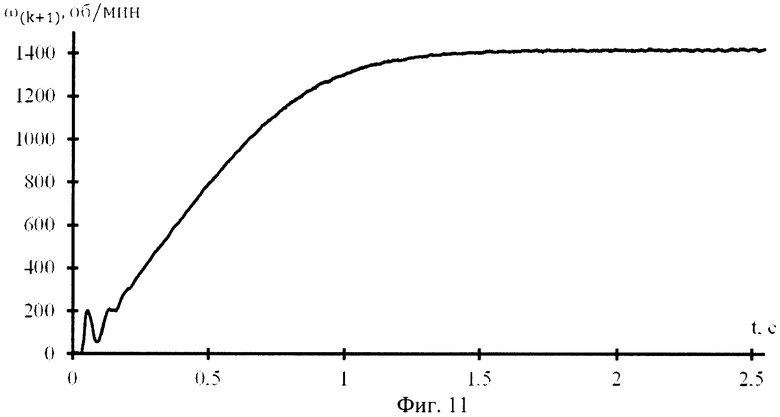
На фиг.11 приведена осциллограмма выходного сигнала датчика частоты вращения.
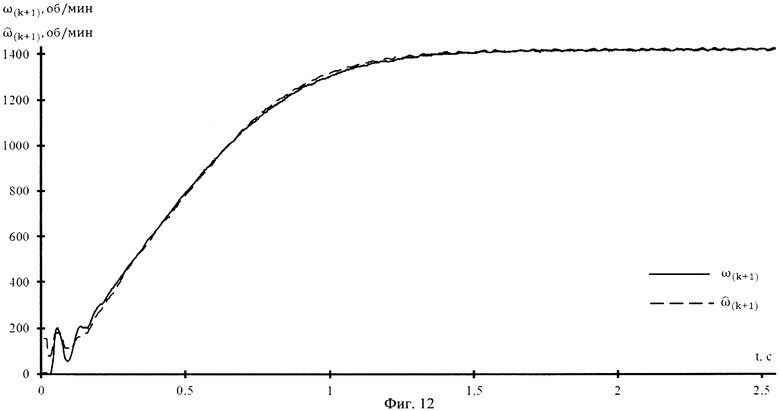
На фиг.12 приведено сравнение частоты вращения асинхронного двигателя и оценки частоты вращения асинхронного двигателя, где сплошной линией показана частота вращения асинхронного двигателя, пунктирной линией показана оценка частоты вращения асинхронного двигателя.
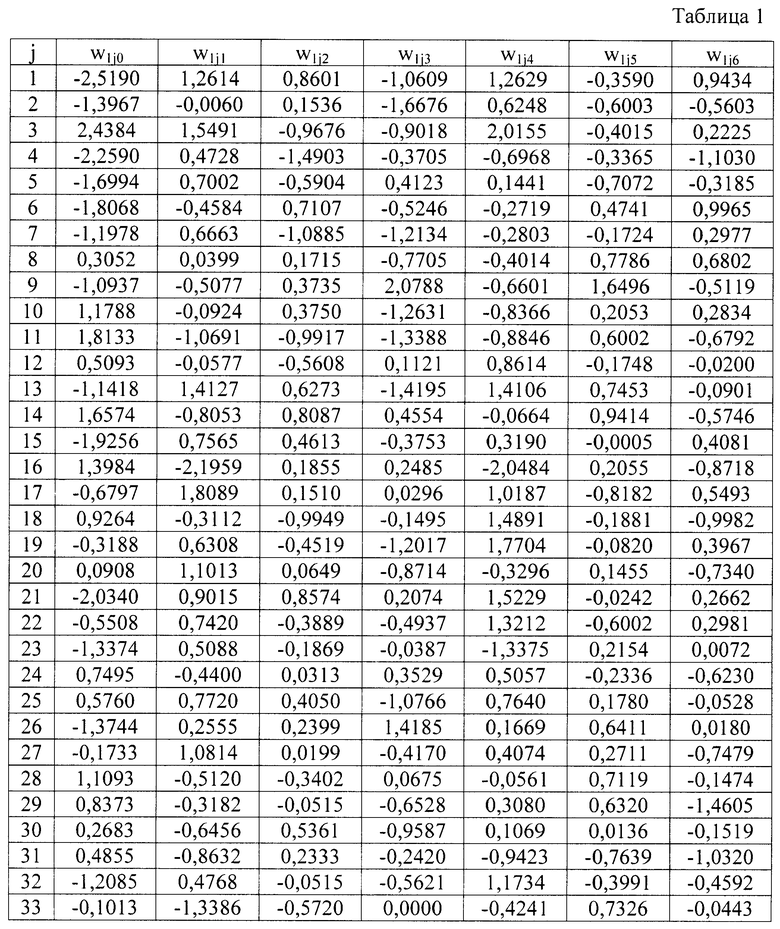
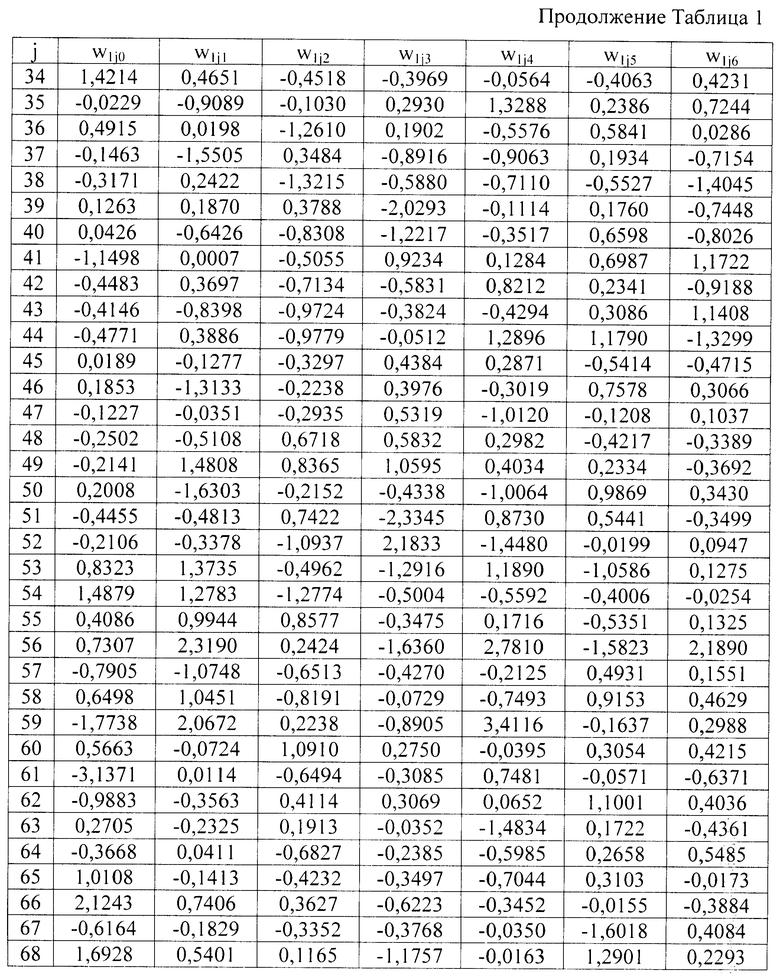
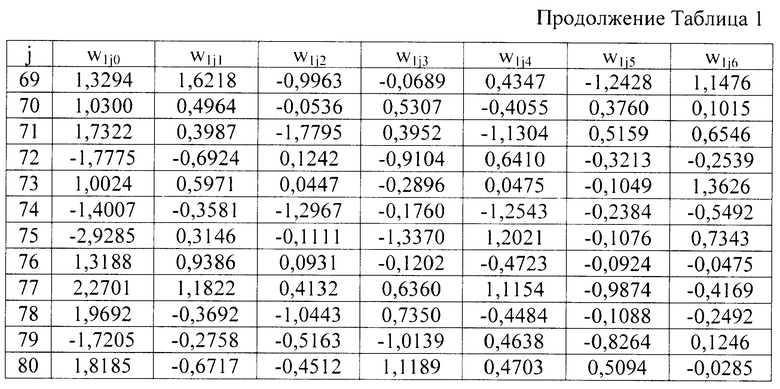
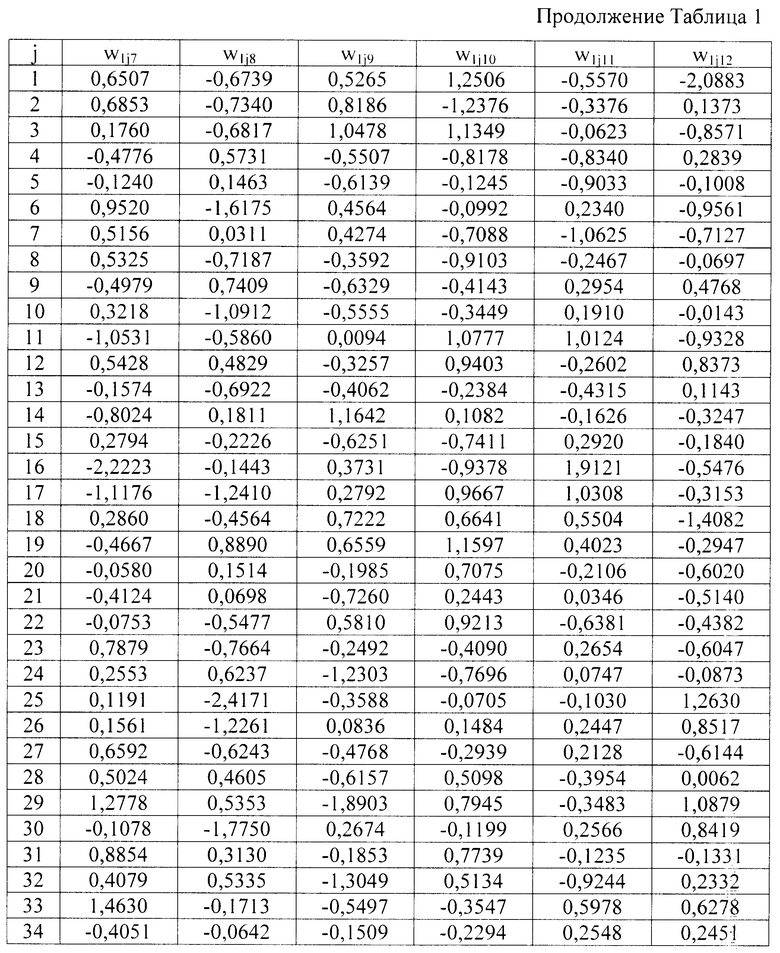
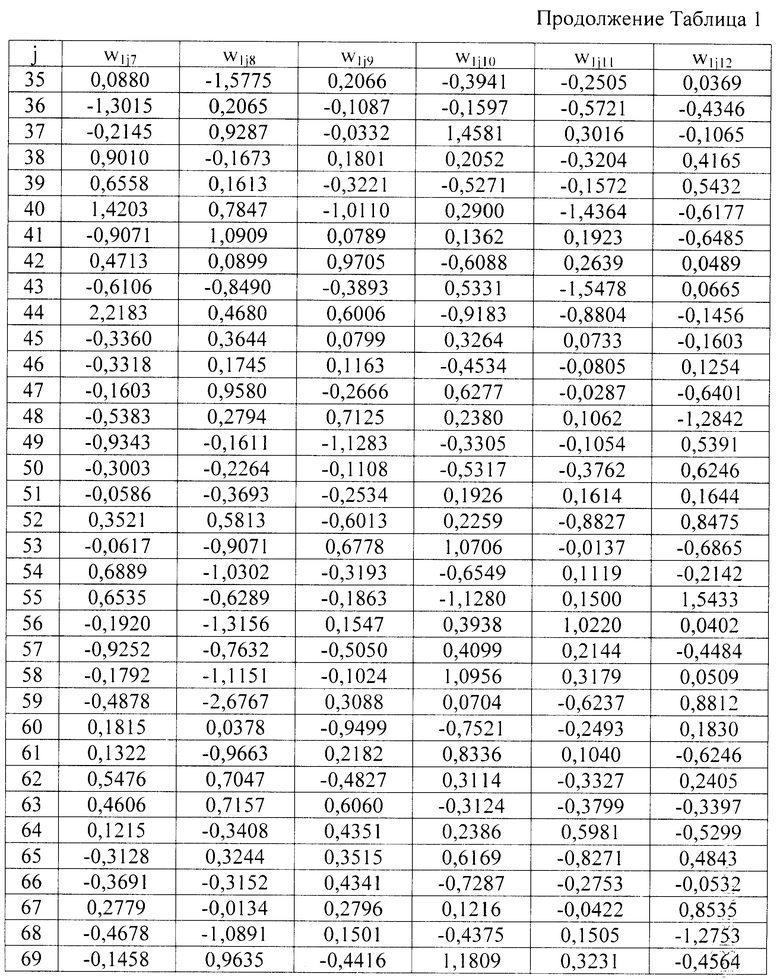
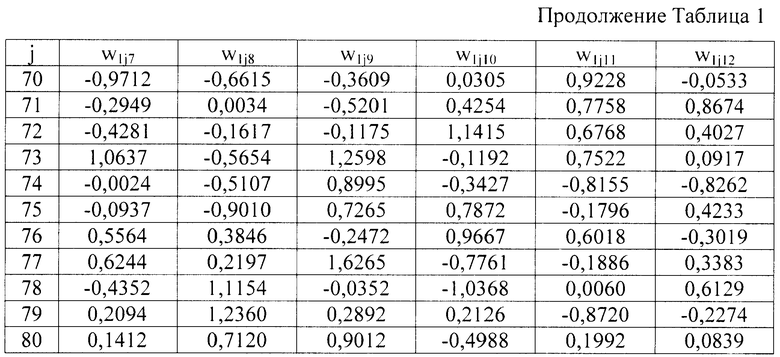
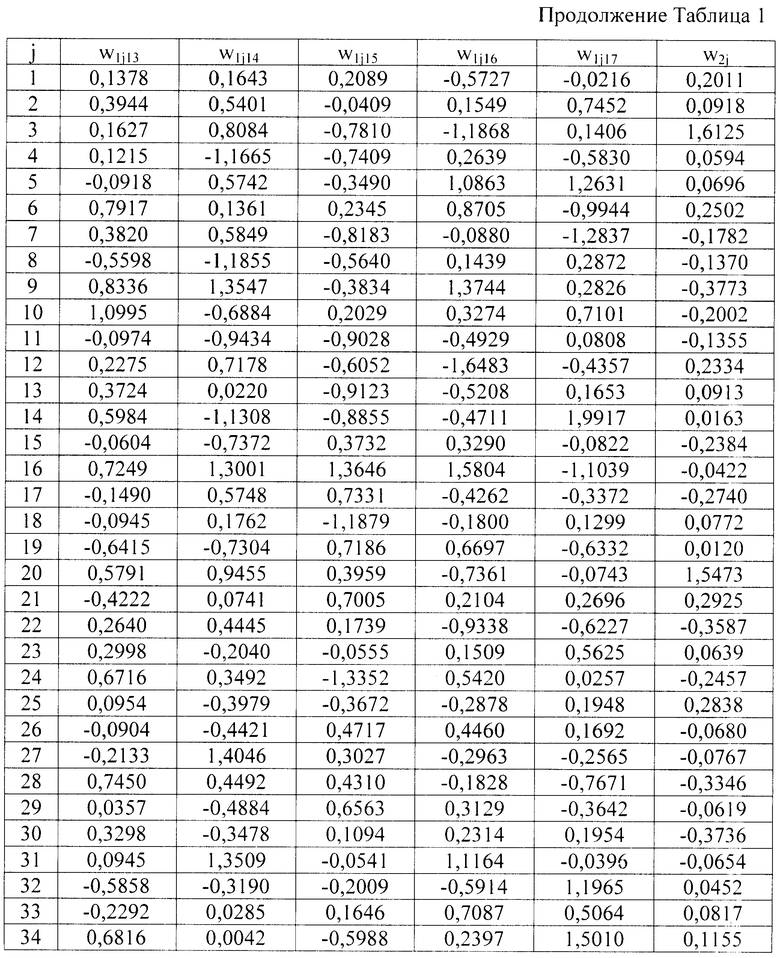
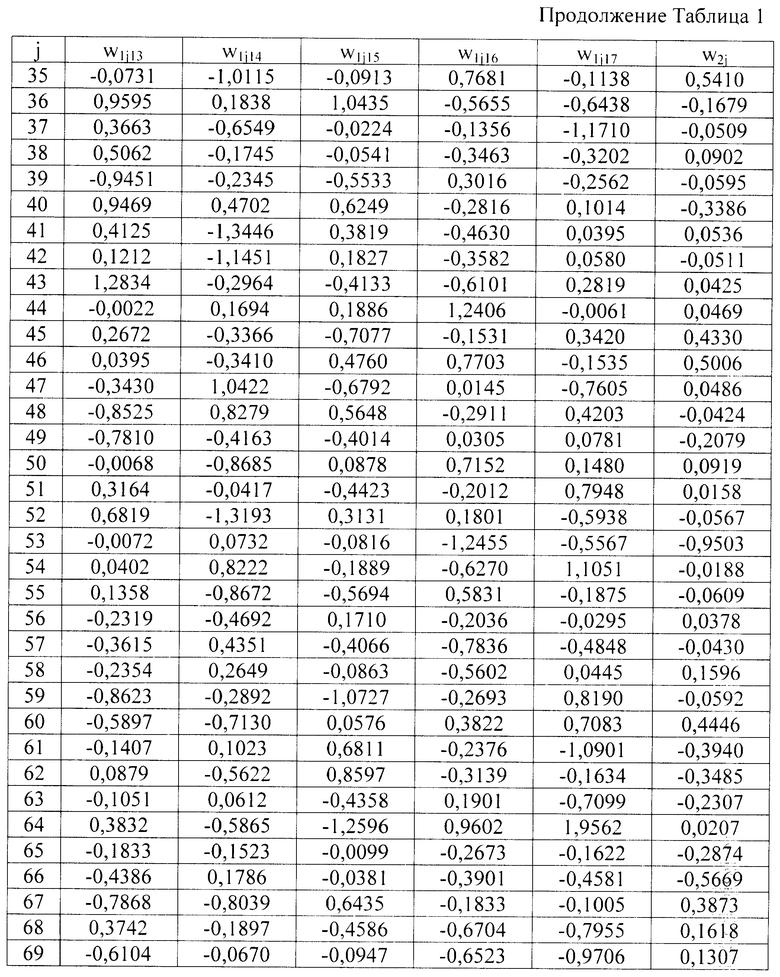
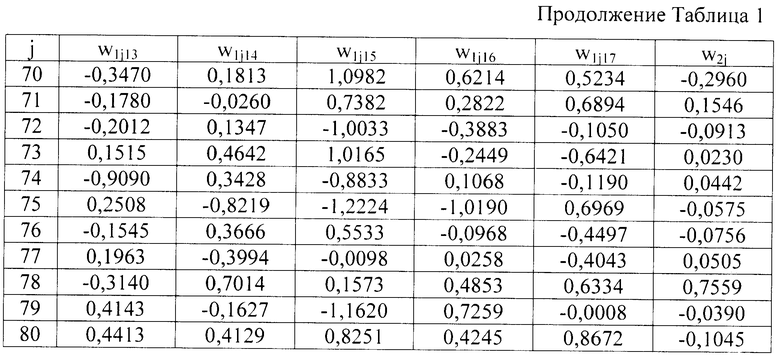
В таблице 1 приведены синаптические веса всех нейронов, полученные в результате обучения искусственной нейронной сети.
Заявленный способ может быть осуществлен с помощью устройства (фиг.1), содержащего датчики фазных токов 1, 2 (ДТ1, ДТ2) и датчики фазных напряжений 3, 4 (ДН1, ДН2), подключенные к двум фазам питания асинхронного двигателя. К первому датчику тока 1 (ДТ1) последовательно подключены первый элемент временной задержки 5 (ЭВЗ1), второй элемент временной задержки 6 (ЭВЗ2), третий элемент временной задержки 7 (ЭВЗ3). Ко второму датчику тока 2 (ДТ2) последовательно подключены четвертый элемент временной задержки 8 (ЭВЗ4), пятый элемент временной задержки 9 (ЭВЗ5), шестой элемент временной задержки 10 (ЭВЗ6). К первому датчику напряжения 3 (ДН1) последовательно подключены седьмой элемент временной задержки 11 (ЭВЗ7), восьмой элемент временной задержки 12 (ЭВЗ8), девятый элемент временной задержки 13 (ЭВЗ9). Ко второму датчику напряжения 4 (ДН2) последовательно подключены десятый элемент временной задержки 14 (ЭВЗ10), одиннадцатый элемент временной задержки 15 (ЭВЗ11), двенадцатый элемент временной задержки 16 (ЭВЗ12). Выходы датчиков фазных токов 1, 2 (ДТ1, ДТ2) и датчики фазных напряжений 3, 4 (ДН1, ДН2) и элементов временной задержки 5-16 (ЭВЗ1-ЭВЗ12) соединены с искусственной нейронной сетью 17 (ИНС), которая связана с дисплеем или ЭВМ (не показано на фиг.1). Выход искусственной нейронной сети 17 (ИНС) соединен с тринадцатым элементом временной задержки 18 (ЭВЗ13), который подключен к входу искусственной нейронной сети 17 (ИНС).
В качестве датчиков фазных токов 1, 2 (ДТ1, ДТ2) могут быть использованы датчики тока - промышленный прибор КЭИ-0,1, а датчики напряжения 3, 4 (ДН1, ДН2) - LEM. Элементы временной задержки 5-16, 18 (ЭВЗ1-ЭВЗ13), искусственная нейронная сеть 17 (ИНС) могут быть выполнены на базе микроконтроллера типа TMS320F2812 фирмы Texas Instruments.
Для определения оценки частоты вращения асинхронного двигателя использовали трехслойную рекуррентную искусственную нейронную сеть (фиг.2) [Осовский С. Нейронные сети для обработки информации: пер. с польск. - М.: Финансы и статистика, 2002. - 200 с.], которая состоит из входного слоя, скрытого слоя и выходного слоя. Количество нейронов во входном слое равно 17, в скрытом слое - 80, в выходном слое - 1. Функция активации всех нейронов скрытого слоя - гиперболический тангенс, выходного слоя - линейная. Нейроны входного слоя ретранслируют входные сигналы на скрытый слой, не преобразуя их.
Перед началом работы обучили искусственную нейронную сеть на выборке, сформированной по опытным данным работы электродвигателя во всех режимах. Период дискретизации - 1 мс. Для обучения искусственной нейронной сети использовали алгоритм обратного распространения ошибки [Осовский С. Нейронные сети для обработки информации: пер. с польск. - М.: Финансы и статистика, 2002. - 51 с.].
Процесс обучения искусственной нейронной сети выглядит следующим образом: все коэффициенты связей между нейронами инициализируются случайными числами, затем сети предъявляется обучающая выборка, и с помощью алгоритма обучения коэффициенты синаптических связей подстраиваются при выполнении циклической процедуры так, чтобы расхождение между обучающей выборкой и реакцией сети на соответствующие входные данные было минимальным.
Для проверки работоспособности предложенного способа определения оценки частоты вращения ротора асинхронного двигателя датчики фазных токов 1, 2 (ДТ1, ДТ2) и датчики фазных напряжений 3, 4 (ДН1, ДН2) подключили к двум фазам питания асинхронного двигателя типа АИР 54 А4 У3. Измерили мгновенные величины токов iA(k), iB(k) и напряжений uA(k), uB(k) на двух фазах статора, передали в элементы временной задержки 5-16 (ЭВЗ1-ЭВЗ12), где последовательно выполнили три временные задержки мгновенных величин токов и напряжений по крайней мере на 6 мс и получили задержанные единожды, дважды и трижды значения токов и напряжений двух фаз статора двигателя. Полученные текущие и задержанные единожды, дважды и трижды мгновенные величины токов iA(k), iA(k-1), iA(k-2), iA(k-3), iB(k), iB(k-1), iB(k-2), iB(k-3) и напряжений uA(k), uA(k-1), uA(k-2), uA(k-3), uB(k), uB(k-1), uB(k-2), uB(k-3) (фиг.2) передали в предварительно обученную искусственную нейронную сеть 17 (ИНС), где, используя выявленные искусственной нейронной сетью при обучении зависимости между входными и выходными данными, определили мгновенную величину оценки частоты вращения ротора по формуле
 ,
,
где m=80 - количество нейронов в скрытом слое,
n=17 - количество нейронов во входном слое,
w1ji - синаптический вес i-го входа j-го нейрона скрытого слоя (табл.1),
w1j0 - сдвиг j-го нейрона скрытого слоя (табл.1),
w2j - синаптический вес j-го входа нейрона выходного слоя (табл.1),
w20=-1,4562 - сдвиг нейрона выходного слоя,
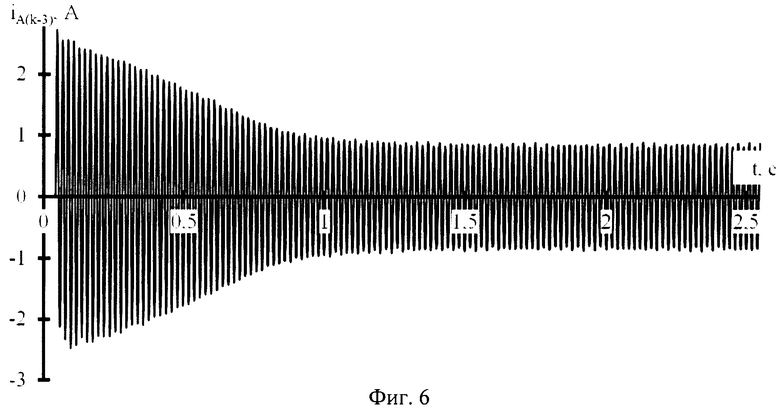
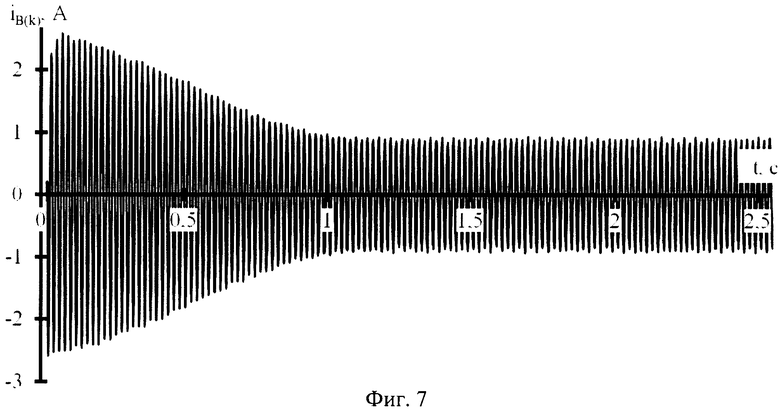
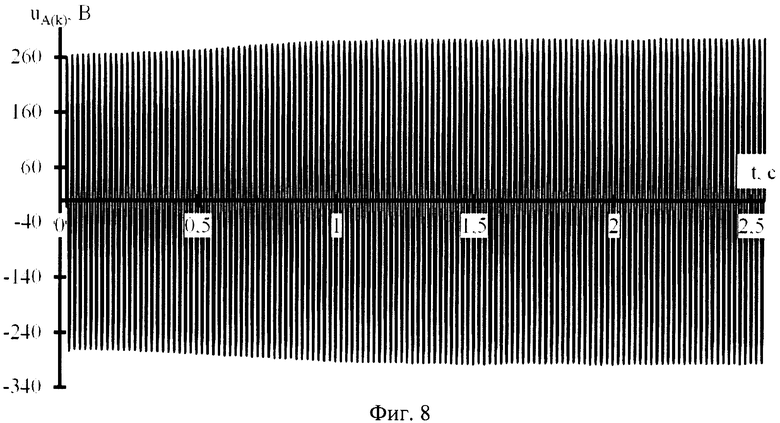
xi - входные сигналы искусственной нейронной сети, равные соответственно iA(k) (фиг.3), iA(k-1) (фиг.4), iA(k-2) (фиг.5), iA(k-3) (фиг.6), iB(k) (фиг.7), iB(k-1), iB(k-2), iB(k-3), uA(k) (фиг.8), uA(k-1), uA(k-2), uA(k-3), uB(k) (фиг.9), uB(k-1), uB(k-2), uB(k-3), .
Мгновенную величину оценки частоты вращения ротора  подали в тринадцатый элемент временной задержки 18 (ЭВЗ13), где получили задержанную по крайней мере на 6 мс оценку частоты вращения ротора , которую передали в искусственную нейронную сеть 17 (ИНС) для создания обратной связи, придающей искусственной нейронной сети собственные нелинейные динамические свойства. Мгновенную величину оценки частоты вращения ротора
подали в тринадцатый элемент временной задержки 18 (ЭВЗ13), где получили задержанную по крайней мере на 6 мс оценку частоты вращения ротора , которую передали в искусственную нейронную сеть 17 (ИНС) для создания обратной связи, придающей искусственной нейронной сети собственные нелинейные динамические свойства. Мгновенную величину оценки частоты вращения ротора  (фиг.10) передали в дисплей. Опрос датчиков, задержку сигналов и определение оценки частоты вращения провели с частотой 1 кГц в течение 2,55 с в пусковом режиме двигателя.
(фиг.10) передали в дисплей. Опрос датчиков, задержку сигналов и определение оценки частоты вращения провели с частотой 1 кГц в течение 2,55 с в пусковом режиме двигателя.
Была проведена проверка правильности определения оценки частоты вращения, для чего на валу асинхронного двигателя расположили фотоэлектрический датчик частоты вращения ЛИР-51 и измерили мгновенную величину частоты вращения ротора  , при этом опрос датчика производился с частотой 1 кГц в течение 2,55 с в пусковом режиме двигателя. Временная зависимость мгновенной величины частоты вращения ротора приведена на фиг.11.
, при этом опрос датчика производился с частотой 1 кГц в течение 2,55 с в пусковом режиме двигателя. Временная зависимость мгновенной величины частоты вращения ротора приведена на фиг.11.
Из приведенного сравнения определенной по заявленному способу временной зависимости оценки частоты вращения ротора и временной зависимости частоты вращения ротора (фиг.12) видно, что ошибка оценивания частоты вращения незначительна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ВИТКОВЫХ ЗАМЫКАНИЙ В ОБМОТКЕ РОТОРА СИНХРОННОГО ГЕНЕРАТОРА | 2016 |
|
RU2629708C1 |
| Способ определения давления центробежного насоса с асинхронным электроприводом | 2021 |
|
RU2791970C1 |
| Способ определения расхода жидкости центробежного насоса с асинхронным электроприводом | 2021 |
|
RU2781571C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДА ЖИДКОСТИ ЦЕНТРОБЕЖНОГО НАСОСА С АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2020 |
|
RU2741267C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАВЛЕНИЯ ЦЕНТРОБЕЖНОГО НАСОСА С АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2020 |
|
RU2743866C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2016 |
|
RU2621880C1 |
| Способ управления синхронным электродвигателем | 2019 |
|
RU2724603C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2525604C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2024 |
|
RU2832962C1 |
Изобретение относится к области электротехники и может быть использовано для цифрового управления асинхронным двигателем. Техническим результатом является расширение арсенала средств аналогичного назначения. В способе определения оценки частоты вращения измеряют мгновенные величины токов и напряжений статора асинхронного двигателя, одновременно проводят измерение мгновенных величин токов и напряжений на двух фазах статора, последовательно выполняют три временные задержки по крайней мере на 6 мс, получая текущие и задержанные единожды, дважды и трижды значения токов и напряжений двух фаз статора двигателя, с помощью предварительно обученной искусственной нейронной сети, по опытным данным работы электродвигателя во всех режимах, используя выявленные искусственной нейронной сетью при обучении зависимости между входными и выходными данными, определяют мгновенную величину оценки частоты вращения ротора асинхронного двигателя по формулам, приведенным в материалах заявки. 12 ил., 1 табл.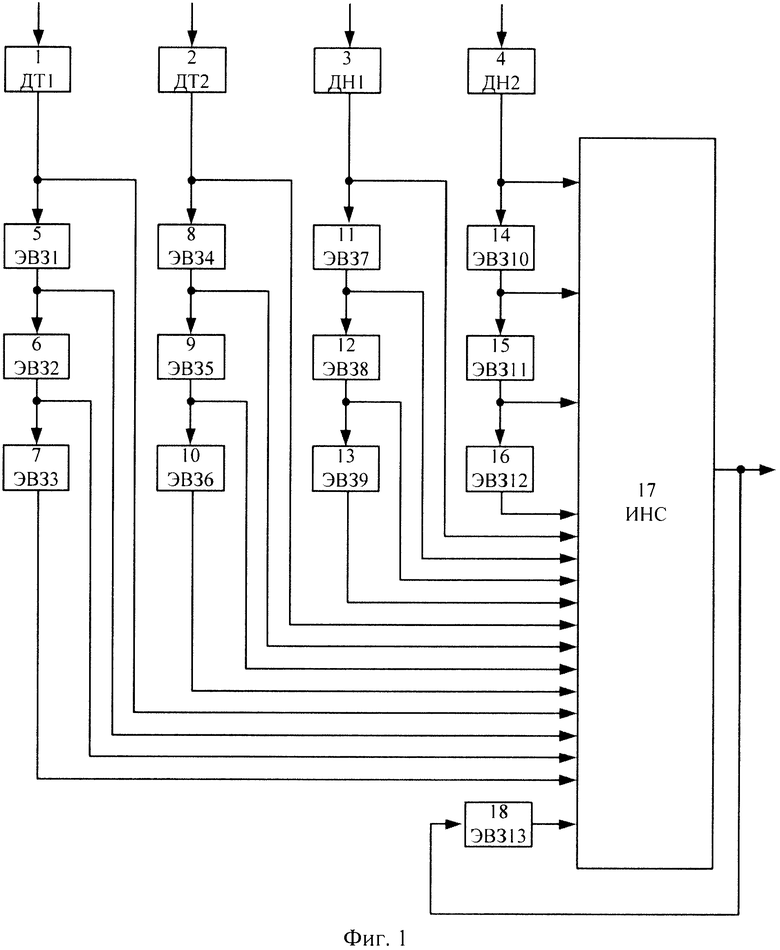
Способ определения оценки частоты вращения асинхронного двигателя, включающий измерение мгновенных величин токов и напряжений статора асинхронного двигателя, отличающийся тем, что одновременно проводят измерение мгновенных величин токов и напряжений на двух фазах статора, последовательно выполняют три временные задержки по крайней мере на 6 мс, получая текущие и задержанные единожды, дважды и трижды значения токов и напряжений двух фаз статора двигателя, с помощью предварительно обученной искусственной нейронной сети, по опытным данным работы электродвигателя во всех режимах, используя выявленные искусственной нейронной сетью при обучении зависимости между входными и выходными данными, определяют мгновенную величину оценки частоты вращения ротора асинхронного двигателя по формуле

где m=80 - количество нейронов в скрытом слое,
n=17 - количество нейронов во входном слое,
w1ji - синаптический вес i-го входа j-го нейрона скрытого слоя,
w1j0 - сдвиг j-го нейрона скрытого слоя,
w2j - синаптический вес j-го входа нейрона выходного слоя,
w20 - сдвиг нейрона выходного слоя,
xi - входные сигналы искусственной нейронной сети, равные соответственно iA(k), iA(k-1), iA(k-2), iA(k-3), iB(k), iB(k-1), iB(k-2), iB(k-3), uA(k), uA(k-1), uA(k-2), uA(k-3), uB(k), uB(k-1), uB(k-2), uB(k-3), ,
задержанную по крайней мере на 6 мс мгновенную величину оценки частоты вращения ротора асинхронного двигателя используют в качестве обратной связи.
| СПОСОБ ОПТИМАЛЬНОЙ ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2385529C1 |
| УСТРОЙСТВО ОЦЕНИВАНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2392731C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| US 6661194 В2, 09.12.2003 | |||
| US 2011050142 А1, 03.03.2011 | |||
| JP 2003033098 А, 31.01.2003 | |||
| ВИХРЕВОЙ ТЕПЛОМАССООБМЕННЫЙ АППАРАТ ДЛЯ МОКРОЙ ПЫЛЕОЧИСТКИ | 1995 |
|
RU2120326C1 |
| WO 2011024058 А2, 03.03.2011. | |||

