Изобретение относится к электротехнике, а именно к электрическим машинам и измерительной технике, и может быть использовано для цифрового управления синхронным электродвигателем с постоянными магнитами.
Известен способ определения угла поворота ротора синхронного электродвигателя с постоянными магнитами [RU 2750334 C1, МПК H02P 21/18 (2016.01), H02P 21/24 (2016.01), H02P 6/16 (2006.01), опубл. 07.10.2020], заключающийся в измерении мгновенных значений силы тока в фазах статора ia(t), ib(t), ic(t), мгновенных значений напряжений на фазах статора, ua(t), ub(t), uc(t), расчета мгновенных значений силы тока i(t) и напряжения u(t) в двухфазной стационарной системе координат αβ, связанной со статором, с помощью преобразования Кларк, определения угла поворота ротора  , с учетом номинальных или измеренных значений сопротивления R и индуктивности L обмоток статора, а также выбранных настраиваемых параметров, по формуле:
, с учетом номинальных или измеренных значений сопротивления R и индуктивности L обмоток статора, а также выбранных настраиваемых параметров, по формуле:
где k - количество пар полюсов,
 и
и  - компоненты оценки потокосцепления
- компоненты оценки потокосцепления  создаваемого постоянными магнитами ротора в двухфазной системе координат αβ, связанной со статором. Для формирования сигналов вектора оценки потокосцепления магнитов ротора
создаваемого постоянными магнитами ротора в двухфазной системе координат αβ, связанной со статором. Для формирования сигналов вектора оценки потокосцепления магнитов ротора  и
и  сигналы токов i(t) и напряжений u(t) в системе координат αβ передают в блоки фильтрации с различными параметрами ξn>0, n принимает значения 1 и 2, которые реализуют по формулам:
сигналы токов i(t) и напряжений u(t) в системе координат αβ передают в блоки фильтрации с различными параметрами ξn>0, n принимает значения 1 и 2, которые реализуют по формулам:
далее фильтрованные сигналы токов и напряжений  ,
,  ,
,  ,
,  и сигналы i(t), u(t) передают в блок вычисления сигналов расширенной модели, где при различных параметрах
и сигналы i(t), u(t) передают в блок вычисления сигналов расширенной модели, где при различных параметрах  формируют сигналы компонент расширенной регрессионной модели
формируют сигналы компонент расширенной регрессионной модели  и
и  по формулам:
по формулам:


их объединяют в блоках объединения сигналов расширенной регрессионной модели по правилу:
и формируют сигналы скалярных моделей в блоке вычисления сигналов скалярных моделей по формулам:
Δ(t)=det{Ф(t)},
Y(t)=adj{Ф(t)}C(t),
det{Ф(t)}, adj{Ф(t)} - определитель и союзная матрица от матрицы Ф(t),
полученные сигналы и сигналы тока i(t) и напряжения u(t) в стационарной системе координат αβ передают в блок оценивания магнитного потока, где формируют сигнал оценки суммарного потокосцепления λ(t) по закону:

γ>0 - настраиваемый коэффициент усиления, одновременно сигнал i(t) усиливают в L раз и вычитают в сумматоре из сигнала оценки суммарного потокосцепления λ(t), в результате чего получают сигнал вектора оценки потокосцепления магнитов ротора χ(t).
Недостатком данного способа является отсутствие возможности получения величины оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами и необходимость использования дополнительного блока дифференцирования для получения значения оценки частоты вращения ротора.
Техническим результатом является создание способа для оценки частоты вращения ротора и оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами, позволяющего реализовать управление синхронным электродвигателем с постоянными магнитами в цифровом виде.
Предложенный способ получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами, так же как в прототипе, включает одновременное измерение мгновенных величин фазных токов и напряжений на трех фазах статора в течение пуска и работы синхронного электродвигателя с постоянными магнитами.
Согласно изобретению измеренные мгновенные величины токов  ,
,  ,
,  и напряжений
и напряжений  ,
, 
 при заданном периоде дискретизации
при заданном периоде дискретизации  одновременно преобразуют из трехфазной системы координат в прямоугольную вращающуюся синхронно с ротором dq-систему координат. Выполняют временную задержку сигналов токов
одновременно преобразуют из трехфазной системы координат в прямоугольную вращающуюся синхронно с ротором dq-систему координат. Выполняют временную задержку сигналов токов  ,
,  и напряжений
и напряжений 
 на один период дискретизации. Преобразованные значения токов
на один период дискретизации. Преобразованные значения токов  ,
,  и напряжений
и напряжений  ,
,  и задержанные величины токов
и задержанные величины токов  ,
,  и напряжений
и напряжений  ,
,  используют для определения величин прогноза оценки токов
используют для определения величин прогноза оценки токов 
 на текущем шаге дискретизации согласно выражениям:
на текущем шаге дискретизации согласно выражениям:


где - активное сопротивление обмотки статора, Ом;
- активное сопротивление обмотки статора, Ом;
 - эквивалентная индуктивность обмотки статора, Гн;
- эквивалентная индуктивность обмотки статора, Гн;
 - потокосцепление постоянного магнита ротора, Вб;
- потокосцепление постоянного магнита ротора, Вб;
 - коэффициенты передачи отработки невязки токов статора в вращающейся dq-системе координат, Ом;
- коэффициенты передачи отработки невязки токов статора в вращающейся dq-системе координат, Ом;
k - шаг дискретизации;
Tд - период дискретизации, с.
Корректируют полученные величины прогноза оценки токов  согласно выражениям:
согласно выражениям:
выполняют временную задержку величин коррекции оценки токов  на один период дискретизации для определения значений оценки токов
на один период дискретизации для определения значений оценки токов  на предыдущем шаге дискретизации. Затем определяют величину прогноза момента сопротивления
на предыдущем шаге дискретизации. Затем определяют величину прогноза момента сопротивления  на валу синхронного электродвигателя с постоянными магнитами на текущем шаге дискретизации согласно выражению:
на валу синхронного электродвигателя с постоянными магнитами на текущем шаге дискретизации согласно выражению:
 ,
,
где - коэффициент интегральной отработки, с;
- коэффициент интегральной отработки, с;
 - количество полюсов.
- количество полюсов.
Определяют величину коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации по выражению:
на текущем шаге дискретизации по выражению:

выполняют временную задержку коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на один период дискретизации для получения сигнала коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами
на один период дискретизации для получения сигнала коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации. Определяют величину оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами
на предыдущем шаге дискретизации. Определяют величину оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации по выражению:
на текущем шаге дискретизации по выражению:

где  - коэффициент пропорциональной отработки, Вб,
- коэффициент пропорциональной отработки, Вб,
Далее выполняют временную задержку оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами на один период дискретизации  . Определяют величину прогноза оценки частоты вращения ротора
. Определяют величину прогноза оценки частоты вращения ротора  на текущем шаге дискретизации по выражению:
на текущем шаге дискретизации по выражению:

где  - эквивалентный момент инерции, приведенный к валу синхронного электродвигателя с постоянными магнитами, кг⋅м2.
- эквивалентный момент инерции, приведенный к валу синхронного электродвигателя с постоянными магнитами, кг⋅м2.
Затем определяют оценку частоты вращения ротора синхронного электродвигателя с постоянными магнитами  по выражению:
по выражению:

выполняют временную задержку оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами на один период дискретизации, получая сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации. Все указанные действия повторяют в течение всего времени работы синхронного электродвигателя с постоянными магнитами.
на предыдущем шаге дискретизации. Все указанные действия повторяют в течение всего времени работы синхронного электродвигателя с постоянными магнитами.
Таким образом, предложенный способ позволяет реализовать управление синхронным электродвигателем с постоянными магнитами в цифровом виде, что отличается меньшей ресурсоемкостью вычислений и позволяет расширить функциональные возможности электропривода для применения в сложных технологических процессах.
На фиг. 1 представлена схема устройства для осуществления способа получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами.
На фиг. 2 изображен график оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами.
На фиг. 3 показан график оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами.
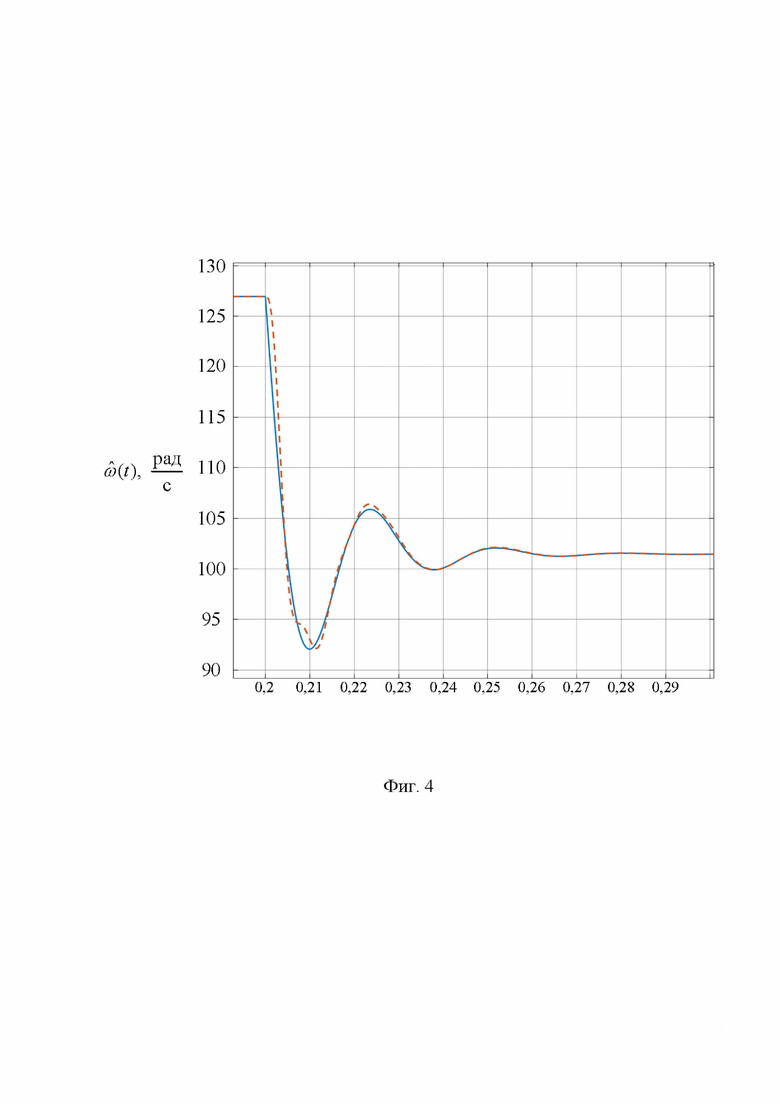
На фиг. 4 приведен график сравнения частоты вращения ротора синхронного электродвигателя с постоянными магнитами, полученной с помощью математической модели синхронного электродвигателя с постоянными магнитами во вращающейся синхронно с ротором ортогональной dq-системе координат, и оценки частоты вращения ротора, полученной заявленным способом, при «набросе» нагрузки, где синей сплошной линией показана частота вращения ротора, красной пунктирной линией показана оценка частоты вращения ротора.
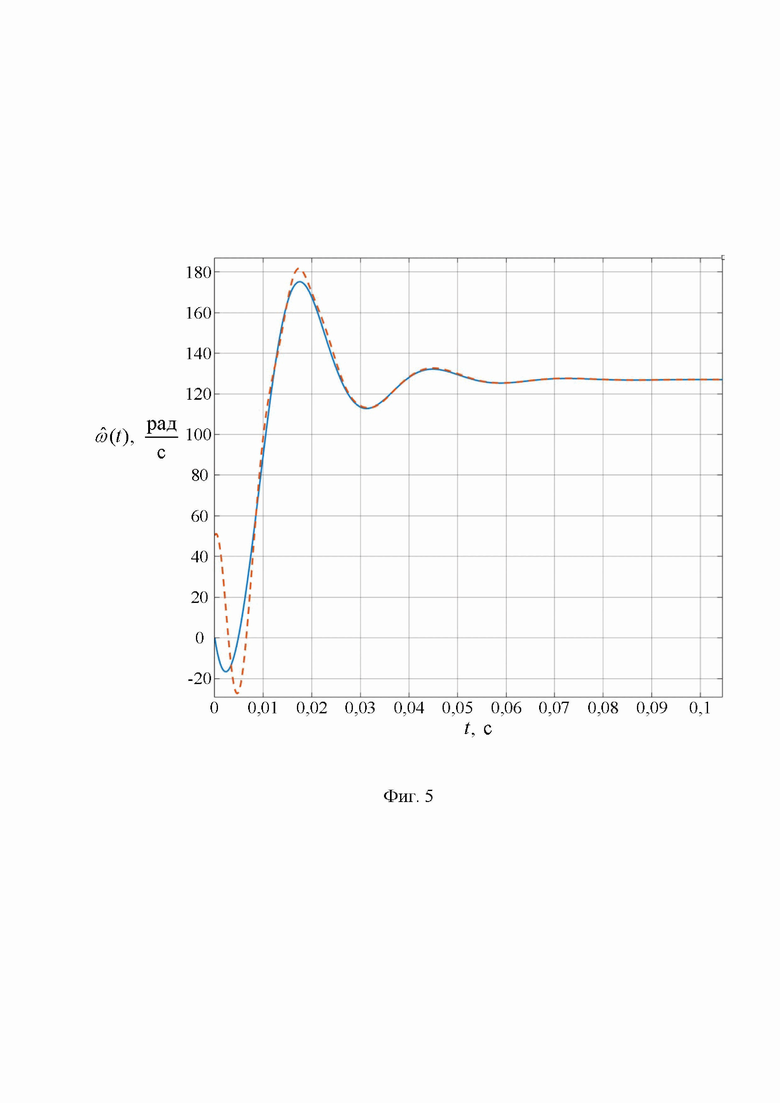
На фиг. 5 представлен график сравнения частоты вращения ротора синхронного электродвигателя с постоянными магнитами, полученной с помощью математической модели синхронного электродвигателя с постоянными магнитами во вращающейся синхронно с ротором ортогональной dq-системе координат, и оценки частоты вращения ротора, полученной заявленным способом, при рассогласовании начальных условий, где синей сплошной линией показана частота вращения ротора, красной пунктирной линией показана оценка частоты вращения ротора.
Устройство для получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами содержит три датчика фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) и три датчика фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3), которые подключены к фазам питания синхронного электродвигателя с постоянными магнитами (не показано на фиг. 1). К выходам датчиков фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) и датчиков фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3) подключен преобразователь координат 7 (ПК). Выходы преобразователя координат 7 (ПК) подключены к первому 8 (БВЗ1), второму 9 (БВЗ2), третьему 10 (БВЗ3), четвертому 11 (БВЗ4) блокам временной задержки, первому 12 (БПОТ1) и второму 13 (БПОТ2) блокам определения величины прогноза оценки тока, блоку определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС), блоку определения оценки момента сопротивления на валу электродвигателя 15 (БОМС).
Первый блок временной задержки 8 (БВЗ1) подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1). Второй блок временной задержки 9 (БВЗ2) подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1). Третий блок временной задержки 10 (БВЗ3) подключен ко второму блоку определения величины прогноза оценки тока 13 (БПОТ2). Четвертый блок временной задержки 11 (БВЗ4) подключен ко второму блоку определения величины прогноза оценки тока 13 (БПОТ2), блоку определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) и блоку определения оценки момента сопротивления на валу электродвигателя 15 (БОМС).
Первый блок определения величины прогноза оценки тока 12 (БПОТ1) соединен с первым блоком определения величины коррекции оценки тока 16 (БКОТ1), который соединен с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), вторым блоком определения величины прогноза оценки тока 13 (БПОТ2) и пятым блоком временной задержки 17 (БВ35). Пятый блок временной задержки 17 (БВ35) подключен к первому блоку определения величины прогноза оценки тока 12 (БПОТ1), второму блоку определения величины прогноза оценки тока 13 (БПОТ2) и первому блоку определения величины коррекции оценки тока 16 (БКОТ1).
Второй блок определения величины прогноза оценки тока 13 (БПОТ2) соединен со вторым блоком определения величины коррекции оценки тока 18 (БКОТ2), который соединен с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), со вторым блоком определения величины прогноза оценки тока 13 (БПОТ2), шестым блоком временной задержки 19 (БВ36), блоком определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС), блоком определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) и блоком определения величины оценки электромагнитного момента 20 (БОЭМ).
Шестой блок временной задержки 19 (БВ36) соединен с первым блоком определения величины прогноза оценки тока 12 (БПОТ1), со вторым блоком определения величины прогноза оценки тока 13 (БПОТ2), блоком определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС), вторым блоком определения величины коррекции оценки тока 18 (БКОТ2), блоком определения оценки момента сопротивления на валу электродвигателя 15 (БОМС), блоком определения величины оценки электромагнитного момента 20 (БОЭМ).
Блок определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) подключен к блоку коррекции оценки момента сопротивления 21 (БКОМС), который подключен к седьмому блоку временной задержки 22 (БВЗ7) и блоку определения оценки момента сопротивления на валу электродвигателя 15 (БОМС). Седьмой блок временной задержки 22 (БВЗ7) подключен к блоку коррекции оценки момента сопротивления 21 (БКОМС).
Блок определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) подключен к блоку прогноза оценки частоты вращения ротора 23 (БПОЧВ), блоку вывода информации 24 (БВИ) и к восьмому блоку временной задержки 25 (БВЗ8). Восьмой блок временной задержки 25 (БВЗ8) подключен к блоку прогноза оценки частоты вращения ротора 23 (БПОЧВ). Блок прогноза оценки частоты вращения ротора 23 (БПОЧВ) подключен к блоку коррекции оценки частоты вращения ротора 26 (БКОЧВ).
Блок определения величины оценки электромагнитного момента 20 (БОЭМ) подключен к блоку прогноза оценки частоты вращения ротора 23 (БПОЧВ) и к девятому блоку временной задержки 27 (БВЗ9). Девятый блок временной задержки 27 (БВЗ9) подключен к блоку прогноза оценки частоты вращения ротора 23 (БПОЧВ).
Блок коррекции оценки частоты вращения ротора 26 (БКОЧВ) подключен к блокам определения величины прогноза оценки тока 12 (БПОТ1) и 13 (БПОТ2), к десятому блоку временной задержки 28 (БВЗ10) и к блоку вывода информации 24 (БВИ). Десятый блок временной задержки 28 (БВЗ10) подключен к блокам определения величины прогноза оценки тока 12 (БПОТ1) и 13 (БПОТ2) и к блоку коррекции оценки частоты вращения ротора 26 (БКОЧВ).
В качестве датчиков фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) использованы датчики напряжения LEM. Датчики фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3) - датчики тока КЭИ - 0,1. Преобразователь координат 7 (ПК), блоки временной задержки 8 (БВЗ1), 9 (БВЗ2), 10 (БВЗ3), 11 (БВЗ4), 17 (БВЗ5), 19 (БВЗ6), 22 (БВЗ7), 25 (БВЗ8), 27 (БВЗ9), 28 (БВЗ10), блоки определения величины прогноза оценки тока 12 (БПОТ1) и 13 (БПОТ2), блок определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС), блок определения оценки момента сопротивления на валу электродвигателя 15 (БОМС), блок определения величины оценки электромагнитного момента 20 (БОЭМ), блоки определения величины коррекции оценки тока 16 (БКОТ1) и 18 (БКОТ2), блок коррекции оценки момента сопротивления 21 (БКОМС), блок прогноза оценки частоты вращения ротора 23 (БПОЧВ), блок вывода информации 24 (БВИ), блок коррекции оценки частоты вращения ротора 26 (БКОЧВ) выполнены на базе микроконтроллера типа STM32F405RGT6 фирмы STMicroelectronics.
Для проверки работоспособности предложенного способа получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами обмотки синхронного электродвигателя с постоянными магнитами марки ПВЭДН 63-81-1280-6.0 со следующими техническими характеристиками:
номинальная мощность электродвигателя 63 кВт,
номинальное напряжение 1280 В,
номинальный ток 33,6 А,
номинальная частота вращения 3000 об/мин,
номинальная удельная ЭДС 0,197 В/(об/мин),
сопротивление фазы статора 0,6 Ом,
индуктивность фазы 4 мГн,
подключили к трехфазному источнику питания.
С помощью датчиков фазных напряжений 1 (ДН1), 2 (ДН2), 3 (ДН3) и датчиков фазных токов 4 (ДТ1), 5 (ДТ2), 6 (ДТ3), подключенных к фазам питания электродвигателя, в течение пуска и работы синхронного электродвигателя с постоянными магнитами производили одновременное измерение мгновенных величин фазных токов IA(t), IB(t), IC(t) и фазных напряжений UA(t), UB(t), UC(t) статора. Сигналы с датчиков 1 (ДН1), 2 (ДН2), 3 (ДН3), 4 (ДТ1), 5 (ДТ2), 6 (ДТ3) передали в преобразователь координат 7 (ПК), в котором осуществляли их преобразование в величины токов Id(k), Iq(k) и напряжений Ud(k), Uq(k) в прямоугольной dq-системе координат в текущий момент времени при заданном периоде дискретизации Tд.
Одновременно сигналы напряжений Ud(k), Uq(k) на текущем шаге дискретизации передали соответственно во второй и третий блоки временной задержки 9 (БВЗ2) и 10 (БВЗ3), а сигналы токов Id(k), Iq(k) на текущем шаге дискретизации передают соответственно в первый и четвертый блоки временной задержки 8 (БВЗ1) и 11 (БВЗ4). В блоках временной задержки 8 (БВЗ1), 9 (БВЗ2), 10 (БВЗ3) и 11 (БВЗ4) выполнили временную задержку сигналов на один период дискретизации. На выходе блоков получили сигналы токов Id(k-1), Iq(k-1) и напряжений Ud(k-1), Uq(k-1) на предыдущем шаге дискретизации.
Для определения величины прогноза оценки тока  на текущем шаге дискретизации одновременно в первый блок определения величины прогноза оценки тока 12 (БПОТ1) поступали сигналы:
на текущем шаге дискретизации одновременно в первый блок определения величины прогноза оценки тока 12 (БПОТ1) поступали сигналы:
из преобразователя координат 7 (ПК) - сигналы тока  и напряжения
и напряжения  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из первого блока временной задержки 8 (БВЗ1) - сигнал тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока временной задержки 9 (БВЗ2) - сигнал напряжения  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из первого блока определения величины коррекции оценки тока 16 (БКОТ1) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из пятого блока временной задержки 17 (БВЗ5) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока определения величины коррекции оценки тока 18 БКОТ2 - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из шестого блока временной задержки 19 (БВЗ6) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из блока коррекции оценки частоты вращения ротора 26 (БКОЧВ) - сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из десятого блока временной задержки 28 (БВЗ10) - сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины прогноза оценки тока  на текущем шаге дискретизации в первом блоке определения величины прогноза оценки тока 12 (БПОТ1) осуществляли по выражению:
на текущем шаге дискретизации в первом блоке определения величины прогноза оценки тока 12 (БПОТ1) осуществляли по выражению:

где  - активное сопротивление обмотки статора, Ом;
- активное сопротивление обмотки статора, Ом;
 - эквивалентная индуктивность обмотки статора, Гн;
- эквивалентная индуктивность обмотки статора, Гн;
 - коэффициент передачи отработки невязки тока статора по оси d в вращающейся dq-системе координат,
- коэффициент передачи отработки невязки тока статора по оси d в вращающейся dq-системе координат,  = 0 Ом;
= 0 Ом;
k - шаг дискретизации;
Tд - период дискретизации, с.
Для определения величины прогноза оценки тока  на текущем шаге дискретизации одновременно во второй блок определения величины прогноза оценки тока 13 (БПОТ2) поступали сигналы:
на текущем шаге дискретизации одновременно во второй блок определения величины прогноза оценки тока 13 (БПОТ2) поступали сигналы:
из преобразователя координат 7 (ПК) - сигналы тока  и напряжения
и напряжения  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из третьего блока временной задержки 10 (БВЗ3) - сигнал напряжения  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из четвертого блока временной задержки 11 (БВЗ4) - сигнал тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из первого блока определения величины коррекции оценки тока 16 (БКОТ1) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из пятого блока временной задержки 17 (БВЗ5) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока определения величины коррекции оценки тока 18 (БКОТ2) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из шестого блока временной задержки 19 (БВЗ6) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из блока коррекции оценки частоты вращения ротора 26 (БКОЧВ) - сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации.
на текущем шаге дискретизации.
из десятого блока временной задержки 28 (БВЗ10) - сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины прогноза оценки тока  на текущем шаге дискретизации во втором блоке определения величины прогноза оценки тока 13 (БПОТ2) осуществляли согласно следующему выражению:
на текущем шаге дискретизации во втором блоке определения величины прогноза оценки тока 13 (БПОТ2) осуществляли согласно следующему выражению:

где  - потокосцепление постоянного магнита ротора, Вб;
- потокосцепление постоянного магнита ротора, Вб;
 - коэффициент передачи отработки невязки тока статора по оси q в вращающейся dq-системе координат,
- коэффициент передачи отработки невязки тока статора по оси q в вращающейся dq-системе координат,  = - 1,2 Ом.
= - 1,2 Ом.
Определение величины коррекции оценки тока  в первом и втором блоках определения величины коррекции оценки тока 16 (БКОТ1) и 18 (БКОТ2) соответственно выполняли согласно выражениям:
в первом и втором блоках определения величины коррекции оценки тока 16 (БКОТ1) и 18 (БКОТ2) соответственно выполняли согласно выражениям:
Для определения величины прогноза оценки момента сопротивления синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации одновременно в блок определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) поступали сигналы:
на текущем шаге дискретизации одновременно в блок определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) поступали сигналы:
из преобразователя координат 7 (ПК) - сигнал тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из четвертого блока временной задержки 11 (БВЗ4) - сигнал тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока определения величины коррекции оценки тока 18 (БКОТ2) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из шестого блока временной задержки 19 (БВЗ6) - сигнал оценки тока  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины прогноза оценки момента сопротивления синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блоке определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) осуществляли по выражению:
на текущем шаге дискретизации в блоке определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) осуществляли по выражению:
 ,
,
где  - коэффициент интегральной отработки,
- коэффициент интегральной отработки,  ;
;
 - число пар полюсов.
- число пар полюсов.
Для определения величины коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блок коррекции оценки момента сопротивления 21 (БКОМС) поступали сигналы:
на текущем шаге дискретизации в блок коррекции оценки момента сопротивления 21 (БКОМС) поступали сигналы:
из блока определения прогноза оценки момента сопротивления на валу электродвигателя 14 (БПОМС) - сигнал прогноза оценки момента сопротивления синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из седьмого блока временной задержки 22 (БВЗ7) - сигнал прогноза оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Определение величины коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блоке коррекции оценки момента сопротивления 21 (БКОМС) осуществляли по выражению:
на текущем шаге дискретизации в блоке коррекции оценки момента сопротивления 21 (БКОМС) осуществляли по выражению:

Для определения величины оценки момента сопротивления на валу  на текущем шаге дискретизации в блок определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) поступали сигналы:
на текущем шаге дискретизации в блок определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) поступали сигналы:
из преобразователя координат 7 (ПК) - сигнал тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из четвертого блока временной задержки 11 (БВЗ4) - сигнал тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из второго блока определения величины коррекции оценки тока 18 (БКОТ2) - сигнал оценки тока  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из шестого блока временной задержки 19 (БВЗ6) - сигнал оценки тока  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из блока коррекции оценки момента сопротивления 21 (БКОМС) - сигнал коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации.
на текущем шаге дискретизации.
Определение оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блоке определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) осуществляли по выражению:
на текущем шаге дискретизации в блоке определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) осуществляли по выражению:

где  - коэффициент пропорциональной отработки,
- коэффициент пропорциональной отработки, 
Для определения величины прогноза оценки частоты вращения ротора  на текущем шаге дискретизации в блок прогноза оценки частоты вращения ротора 23 (БПОЧВ) поступали сигналы:
на текущем шаге дискретизации в блок прогноза оценки частоты вращения ротора 23 (БПОЧВ) поступали сигналы:
из блока определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) - сигнал оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из блока определения величины оценки электромагнитного момента 20 (БОЭМ) - сигнал оценки электромагнитного момента на текущем шаге дискретизации;
из восьмого блока временной задержки 25 (БВЗ8) - сигнал оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации;
на предыдущем шаге дискретизации;
из девятого блока временной задержки 27 (БВЗ9) - сигнал оценки электромагнитного момента на предыдущем шаге дискретизации.
Определение величины прогноза оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блоке прогноза оценки частоты вращения ротора 23 (БПОЧВ) осуществляли по выражению:
на текущем шаге дискретизации в блоке прогноза оценки частоты вращения ротора 23 (БПОЧВ) осуществляли по выражению:

где  - эквивалентный момент инерции, приведенный к валу синхронного электродвигателя с постоянными магнитами, кг⋅м2.
- эквивалентный момент инерции, приведенный к валу синхронного электродвигателя с постоянными магнитами, кг⋅м2.
Для определения величины коррекции оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации в блок коррекции оценки частоты вращения ротора 26 (БКОЧВ) поступали сигналы:
на текущем шаге дискретизации в блок коррекции оценки частоты вращения ротора 26 (БКОЧВ) поступали сигналы:
из блока прогноза оценки частоты вращения ротора 23 (БПОЧВ) - сигнал прогноза оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации;
на текущем шаге дискретизации;
из десятого блока временной задержки 28 (БВЗ10) - сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  на предыдущем шаге дискретизации.
на предыдущем шаге дискретизации.
Сигнал оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  определяли по выражению:
определяли по выражению:

Результаты определения за период времени  с (фиг. 1 и фиг. 2 соответственно).оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами
с (фиг. 1 и фиг. 2 соответственно).оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  из блока коррекции оценки частоты вращения 26 (БКОЧВ) и оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами
из блока коррекции оценки частоты вращения 26 (БКОЧВ) и оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  из блока определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) передали в блок вывода информации 24 (БВИ)
из блока определения оценки момента сопротивления на валу электродвигателя 15 (БОМС) передали в блок вывода информации 24 (БВИ)
Проверку правильности определения оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами и оценки момента сопротивления на его валу осуществляли:
1. Путем сравнения в момент времени  установившихся значений оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами
установившихся значений оценки частоты вращения ротора синхронного электродвигателя с постоянными магнитами  и оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами
и оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  , полученные заявленным способом, с установившимися значениями частоты вращения ротора
, полученные заявленным способом, с установившимися значениями частоты вращения ротора  и момента сопротивления на валу
и момента сопротивления на валу  , полученного с помощью математической модели синхронного электродвигателя с постоянными магнитами во вращающейся dq-системе координат [Курносов, Д. А. Развитие теории и принципов векторного управления вентильным электроприводом на базе синхронного двигателя с возбуждением от постоянных магнитов : 05.09.03 : дис. д-ра. техн. наук / Д. А. Курносов: ЮУрГУ. - Челябинск, 2018. - С. 26-27].
, полученного с помощью математической модели синхронного электродвигателя с постоянными магнитами во вращающейся dq-системе координат [Курносов, Д. А. Развитие теории и принципов векторного управления вентильным электроприводом на базе синхронного двигателя с возбуждением от постоянных магнитов : 05.09.03 : дис. д-ра. техн. наук / Д. А. Курносов: ЮУрГУ. - Челябинск, 2018. - С. 26-27].
В таблице 1 приведены данные для сравнения частоты вращения ротора и момента сопротивления на валу синхронного электродвигателя с постоянными магнитами, полученных с помощью математической модели во вращающейся системе координат dq, и оценки частоты вращения ротора и оценки момента сопротивления на валу в установившемся режиме при номинальной нагрузке.
Таблица 1
Из приведенного в таблице 1 сравнения установившихся значений наблюдается, что статическая ошибка оценки частоты вращения и оценки момента сопротивления отсутствует.
2. Путем сравнения переходных процессов оценки частоты вращения ротора  и эталонной частоты вращения ротора
и эталонной частоты вращения ротора  , полученных заявленным способом и с помощью математической модели синхронного электродвигателя с постоянными магнитами при различных режимах работы: «набросе» нагрузки (фиг. 4) за период времени 0,11 с, пуске при рассогласовании начальных условий за период времени 0,109 с (фиг. 5).
, полученных заявленным способом и с помощью математической модели синхронного электродвигателя с постоянными магнитами при различных режимах работы: «набросе» нагрузки (фиг. 4) за период времени 0,11 с, пуске при рассогласовании начальных условий за период времени 0,109 с (фиг. 5).
Из приведенных сравнений при «набросе» нагрузки видно, что кривая переходного процесса оценки скорости  (фиг. 4) соответствует эталонному значению скорости
(фиг. 4) соответствует эталонному значению скорости  , а интегральная погрешность составляет
, а интегральная погрешность составляет  %, следовательно, погрешность оценки частоты вращения незначительна. Из приведенного сравнения при рассогласовании начальных условий видно, что кривая
%, следовательно, погрешность оценки частоты вращения незначительна. Из приведенного сравнения при рассогласовании начальных условий видно, что кривая  (фиг. 5) соответствует эталонному значению
(фиг. 5) соответствует эталонному значению после отработки рассогласования с интегральной погрешностью
после отработки рассогласования с интегральной погрешностью  %. Время отработки рассогласования
%. Время отработки рассогласования  с, что меньше, чем время переходного процесса частоты вращения ротора синхронного электродвигателя с постоянными магнитами
с, что меньше, чем время переходного процесса частоты вращения ротора синхронного электродвигателя с постоянными магнитами 
 с.
с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2024 |
|
RU2825800C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2818309C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОКА ЩЕТОК ЩЕТОЧНО-КОНТАКТНОГО АППАРАТА СИНХРОННЫХ ГЕНЕРАТОРОВ | 2007 |
|
RU2383029C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2718708C1 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2019 |
|
RU2711647C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ОШИБКИ СЛЕЖЕНИЯ И СИГНАЛА КОРРЕКЦИИ ПОКАЗАНИЙ СЛЕДЯЩЕГО ФИЛЬТРА КОМПЛЕКСНОЙ ОГИБАЮЩЕЙ ВХОДНОГО СИГНАЛА | 2006 |
|
RU2346292C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТОКА РОТОРА СИНХРОННЫХ ГЕНЕРАТОРОВ С БЕСЩЕТОЧНЫМ ВОЗБУЖДЕНИЕМ | 2007 |
|
RU2327273C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2705939C1 |
| Система и способ векторного управления электродвигателем с постоянными магнитами | 2020 |
|
RU2760227C1 |
Изобретение относится к электротехнике, а именно к электрическим машинам и измерительной технике, и может быть использовано для цифрового управления синхронным электродвигателем с постоянными магнитами. Технический результат: позволяет реализовать управление синхронным электродвигателем с постоянными магнитами в цифровом виде, что отличается меньшей ресурсоемкостью вычислений и позволяет расширить функциональные возможности электропривода. Технический результат достигается за счет способа получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами, который включает измерение мгновенных значений фазных токов  ,
,  ,
,  и фазных напряжений
и фазных напряжений  ,
, 
 при заданном периоде дискретизации
при заданном периоде дискретизации  , которые преобразуют из трехфазной системы координат в прямоугольную вращающуюся синхронно с ротором dq-систему координат. Выполняют временную задержку сигналов токов
, которые преобразуют из трехфазной системы координат в прямоугольную вращающуюся синхронно с ротором dq-систему координат. Выполняют временную задержку сигналов токов  ,
,  и напряжений
и напряжений  ,
,  на один период дискретизации. Полученные значения токов
на один период дискретизации. Полученные значения токов  ,
,  и напряжений
и напряжений  ,
,  и задержанные величины токов
и задержанные величины токов  ,
,  и напряжений
и напряжений  ,
,  используют для определения величин прогноза оценки токов
используют для определения величин прогноза оценки токов 
 на текущем шаге дискретизации. Полученные значения прогноза оценки токов
на текущем шаге дискретизации. Полученные значения прогноза оценки токов  корректируют и выполняют временную задержку величин токов
корректируют и выполняют временную задержку величин токов  на один период дискретизации для определения значения оценки токов
на один период дискретизации для определения значения оценки токов  на предыдущем шаге дискретизации. Далее определяют величину прогноза момента сопротивления
на предыдущем шаге дискретизации. Далее определяют величину прогноза момента сопротивления  на валу синхронного электродвигателя с постоянными магнитами на текущем шаге дискретизации и определяют величину коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами
на валу синхронного электродвигателя с постоянными магнитами на текущем шаге дискретизации и определяют величину коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации. Выполняют временную задержку коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами
на текущем шаге дискретизации. Выполняют временную задержку коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на один период дискретизации для получения сигнала коррекции оценки момента сопротивления на валу
на один период дискретизации для получения сигнала коррекции оценки момента сопротивления на валу  на предыдущем шаге дискретизации. Определяют оценку момента сопротивления на валу
на предыдущем шаге дискретизации. Определяют оценку момента сопротивления на валу  на текущем шаге дискретизации и производят временную задержку полученной оценки момента сопротивления на один период дискретизации
на текущем шаге дискретизации и производят временную задержку полученной оценки момента сопротивления на один период дискретизации  . Затем определяют величину прогноза оценки частоты вращения ротора
. Затем определяют величину прогноза оценки частоты вращения ротора  на текущем шаге дискретизации. Выполняют коррекцию полученного значения для определения оценки частоты вращения ротора
на текущем шаге дискретизации. Выполняют коррекцию полученного значения для определения оценки частоты вращения ротора  . Выполняют временную задержку оценки частоты вращения ротора на один период дискретизации для получения сигнала оценки частоты вращения ротора
. Выполняют временную задержку оценки частоты вращения ротора на один период дискретизации для получения сигнала оценки частоты вращения ротора  на предыдущем шаге дискретизации. 5 ил., 1 табл.
на предыдущем шаге дискретизации. 5 ил., 1 табл.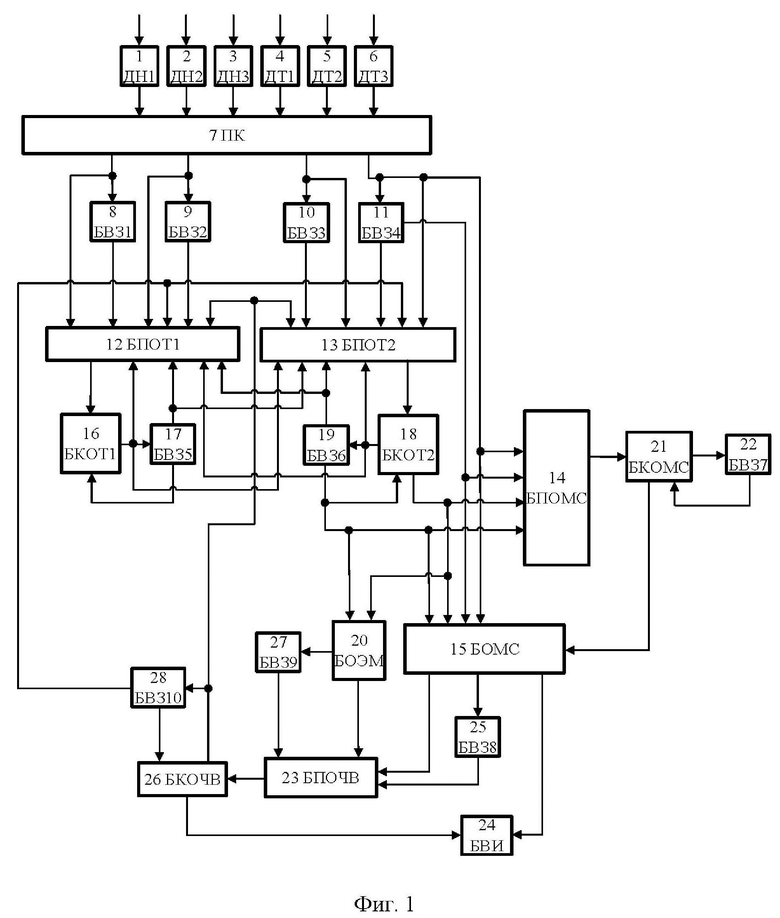
Способ получения сигнала оценки частоты вращения ротора и сигнала оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами, включающий одновременное измерение мгновенных величин фазных токов и напряжений на трех фазах статора в течение пуска и работы синхронного электродвигателя с постоянными магнитами, отличающийся тем, что одновременно преобразуют измеренные мгновенные величины токов  ,
,  ,
,  и напряжений
и напряжений  ,
, 
 при заданном периоде дискретизации
при заданном периоде дискретизации  из трехфазной системы координат в прямоугольную вращающуюся синхронно с ротором dq-систему координат, выполняют временную задержку сигналов токов
из трехфазной системы координат в прямоугольную вращающуюся синхронно с ротором dq-систему координат, выполняют временную задержку сигналов токов  ,
,  и напряжений
и напряжений 
 на один период дискретизации, преобразованные значения токов
на один период дискретизации, преобразованные значения токов  ,
,  и напряжений
и напряжений  ,
,  и задержанные величины токов
и задержанные величины токов  ,
,  и напряжений
и напряжений  ,
,  используют для определения величин прогноза оценки токов
используют для определения величин прогноза оценки токов 
 на текущем шаге дискретизации согласно выражениям:
на текущем шаге дискретизации согласно выражениям:


где - активное сопротивление обмотки статора, Ом;
- активное сопротивление обмотки статора, Ом;
 - эквивалентная индуктивность обмотки статора, Гн;
- эквивалентная индуктивность обмотки статора, Гн;
 - потокосцепление постоянного магнита ротора, Вб;
- потокосцепление постоянного магнита ротора, Вб;
 - коэффициенты передачи отработки невязки токов статора в вращающейся dq-системе координат, Ом;
- коэффициенты передачи отработки невязки токов статора в вращающейся dq-системе координат, Ом;
k - шаг дискретизации;
Тд - период дискретизации, с,
корректируют полученные величины прогноза оценки токов  согласно выражениям:
согласно выражениям:
выполняют временную задержку величин токов  на один период дискретизации для определения значений оценки токов
на один период дискретизации для определения значений оценки токов  на предыдущем шаге дискретизации, определяют величину прогноза момента сопротивления
на предыдущем шаге дискретизации, определяют величину прогноза момента сопротивления  на валу синхронного электродвигателя с постоянными магнитами на текущем шаге дискретизации согласно выражению:
на валу синхронного электродвигателя с постоянными магнитами на текущем шаге дискретизации согласно выражению:
 ,
,
где  - коэффициент интегральной отработки, с;
- коэффициент интегральной отработки, с;
 - количество полюсов,
- количество полюсов,
определяют величину коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на текущем шаге дискретизации по выражению:
на текущем шаге дискретизации по выражению:

выполняют временную задержку коррекции оценки момента сопротивления на валу синхронного электродвигателя с постоянными магнитами  на один период дискретизации для получения сигнала коррекции оценки момента сопротивления на валу
на один период дискретизации для получения сигнала коррекции оценки момента сопротивления на валу  на предыдущем шаге дискретизации, определяют оценку момента сопротивления на валу
на предыдущем шаге дискретизации, определяют оценку момента сопротивления на валу  на текущем шаге дискретизации по выражению:
на текущем шаге дискретизации по выражению:

где  - коэффициент пропорциональной отработки, Вб,
- коэффициент пропорциональной отработки, Вб,
выполняют временную задержку оценки момента сопротивления на валу на один период дискретизации  , определяют величину прогноза оценки частоты вращения ротора
, определяют величину прогноза оценки частоты вращения ротора  на текущем шаге дискретизации по выражению:
на текущем шаге дискретизации по выражению:

где  - эквивалентный момент инерции, приведенный к валу синхронного электродвигателя с постоянными магнитами, кг⋅м2,
- эквивалентный момент инерции, приведенный к валу синхронного электродвигателя с постоянными магнитами, кг⋅м2,
определяют оценку частоты вращения ротора  по выражению:
по выражению:

и выполняют временную задержку оценки частоты вращения ротора на один период дискретизации, получая сигнал оценки частоты вращения ротора  на предыдущем шаге дискретизации, причем указанные действия повторяют в течение всего времени работы синхронного электродвигателя с постоянными магнитами.
на предыдущем шаге дискретизации, причем указанные действия повторяют в течение всего времени работы синхронного электродвигателя с постоянными магнитами.
| CN 117200622 A, 08.12.2023 | |||
| CN 116915110 A, 20.10.2023 | |||
| Устройство измерения неравномерности мгновенной частоты вращения вала | 2018 |
|
RU2703274C1 |
| Способ определения угла поворота ротора синхронного электродвигателя с постоянными магнитами | 2020 |
|
RU2750334C1 |
| CN 114977663 A, 30.08.2022 | |||
| CN 107241042 A, 10.10.2017. | |||

