Изобретение относится к электротехнике, к системам частотного регулирования скорости синхронных двигателей, питаемых от автономного инвертора напряжения (АИН), в режиме «бездатчикового» управления. Цель - разработка алгоритма для устойчивого и экономичного режима работы двигателя в условиях изменяющегося момента нагрузки на его валу.
Известны способы управления [1, 2], в которых статорные обмотки синхронных двигателей получают питание от m-фазного инвертора с амплитудами и частотой, регулируемыми за счет сигналов тока и напряжения фаз в обмотках статора или других сигналов и вычислительных процедур, позволяющих выявить угловое положение ротора синхронной машины. Недостатками их являются большое количество необходимых датчиков, сигналов и вычислений, замедляющих реакцию инвертора на изменение момента нагрузки [1, 3], либо усложнение конструкции ротора за счет короткозамкнутой обмотки [2].
Технический результат - использование в алгоритме только сигналов датчиков тока фаз двигателя (отсутствие необходимости в сигналах других датчиков), повышение быстродействия и поддержание режима с максимальным коэффициентом мощности электродвигателя, достигается тем, что для питания обмоток статора используется автономный инвертор с вычислителем, содержащим канал регулирования амплитуды Um и канал регулирования частоты напряжений обмотки статора ωзад, отличающийся тем, что с целью обеспечения устойчивого вращения ротора при наиболее выгодном значении коэффициента потребляемой двигателем мощности (Cosϕ=1):
- в канал регулирования амплитуды Em вводится сигнал ΔU, увеличивающий амплитуду, если в обмотках статора возникает ток, опережающий напряжение статора и, соответственно, уменьшающий ее, если ток статора становится отстающим;
- в канал регулирования частоты ωзад вводится сигнал в виде фазового сдвига (на угол ϕ) с положительным знаком, если в обмотках статора возникает ток, опережающий напряжение и, соответственно, с отрицательным знаком, если ток в обмотках оказывается отстающим;
- для управления автономным инвертором используется функциональная схема вычислителя, обведенная на фиг. 1 пунктиром, в которой для «выделения» сигналов ΔU≠0 и ϕ используются сигналы только датчиков тока Дm после их преобразований из трехфазной (физической) модели iA, iB, iC в эквивалентную двухфазную модель ia, ib для ввода в вычислитель
ia=КДТIm[Sin(ωзадt+ϕ)],
ia=КДТIm[Cos(ωзадt+ϕ)]
и, повторяющейся для этих сигналов вычислительной процедуры,
(ia⋅Cosωt-ib⋅Sinωt)Кu(1+1/Tp)=Кu(1+1/Тр)⋅КДТ⋅ImSinϕ=ΔU≠0;
(ia⋅Cosωt-ib⋅Sinωt)Кϕ=Кϕ⋅КДТ⋅ImSinϕ→0 при ϕ→0;
где КДТ - коэффициент преобразования датчиков тока;
Im - амплитудное значение токов фазных обмоток статора, А;
ωзад - заданная угловая частота автономного инвертора, рад/с;
ϕ - угол сдвига между током и напряжением в обмотке статора, в рад;
ΔU - приращение задания напряжения статора для автономного инвертора, при котором ϕ→0;
Sin и Cos тригонометрические функции от угла θзад=ωзад⋅t+ϕ.
Функциональная схема электропривода состоит из пульта управления (ПУ) 1, вычислителя (2÷18), реализующего способ и обведенного на фиг. 1 пунктирной линией, автономного инвертора напряжения (АИН) 19 и синхронного двигателя 20. Она позволяет с помощью сигнала задания частоты ωзад и сигнала обратной связи по токам фаз статорной обмотки двигателя iA, iB, iC сформировать сигналы задания для АИН UA, UB, UC и обеспечить устойчивую работу двигателя в режиме Cosϕ=1 в диапазоне нагрузок от холостого хода до момента опрокидывания 
Схема содержит следующие сигналы и элементы математических преобразований над ними:
1 - пульт управления электроприводом (ПУ), формирует график заданной угловой частоты вращения вектора напряжения обмотки статора ωзад(t);
2 - интегратор или узел умножения ωзад на время t, обеспечивающий преобразование заданной угловой частоты в заданное значение углового перемещения вектора напряжения статора ωзадt в электрических радианах;
3 - узел умножения ωзад на величину потокосцепления Ψ, обеспечивающий формирование амплитудного значения выходного напряжения инвертора, компенсирующего ЭДС обмоток эквивалентного двухфазного синхронного двигателя Em=ωзад⋅Ψ;
4, 6, 7 и 12 - узлы алгебраического суммирования сигналов соответствсенно (Em+ΔU)=Um, (1+1/Тр) Кдт⋅ImSinϕ, (ωt+ϕ)=θзад и ia⋅Cosωt-ib⋅Sinωt;
5 и 8 - узлы умножения, обеспечивающие получение корректирующие уровни сигнала ΔU=КU⋅(1+1/Тр)Кдт⋅ImSinϕ для канала регулирования амплитуды и сигнала ϕ=Кϕ⋅Кдт⋅ImSinϕ для канала регулирования частоты;
9 - узел интегрирования с коэффициентом 1/Т в составе сигнала коррекции по каналу задания амплитуды;
10, 11 - узлы преобразования θзад в тригонометрические функции этого угла;
13, 14 - узлы умножения для формирования заданных значений напряжений в эквивалентной двухфазной машине Ua=Um⋅Cosθзад и Ub=Um⋅Sinθзад;
15,16 - узлы умножения (формирования произведений) ia⋅Cosθзад, ib⋅Sinθзад;
17 - узел преобразования двухфазного задания напряжений Ua и Ub в трехфазное задание UA, UB, UC для автономного инвертора напряжения (АИН)
UA=Ua=Um⋅Cosθзад, UB=Um⋅Cos(θзад-2π/3), UC=Um⋅Cos(θзад +2π/3);
18 - преобразователь трехфазных сигналов тока iA, iB, iC в сигналы тока эквивалентной двухфазной машины ia, ib [ia=iA, 
19 -автономный инвертор напряжения (АИН), питающий двигатель и формирующий сигналы датчиков тока (Дm) iA, iB, iC 3-х фазной синхронной машины;
20 - синхронный двигатель.
С целью упрощения алгоритма (сокращения математических операций, а значит и времени на повторяющуюся вычислительную процедуру) допустим менее строгий синтез, обеспечивающий устойчивый режим вращения синхронной машины во всем диапазоне скоростей. Режим с Cosϕ=1 при этом достигается только на одной скорости и при одной величине момента нагрузки. В качестве обратной связи в ней также используется сигнал по реактивной составляющей тока статора Кдт⋅ImSinϕ. Через безразмерные коэффициенты Кu и Кϕ он подается в каналы управления амплитудой ΔU и частотой ϕ. Пример такой «упрощенной» структуры приведен на фиг. 2. По сравнению со структурой на фиг. 1 в структуре на фиг. 2 исключен интегратор 9 с коэффициентом 1/Т и элемент суммирования 6.
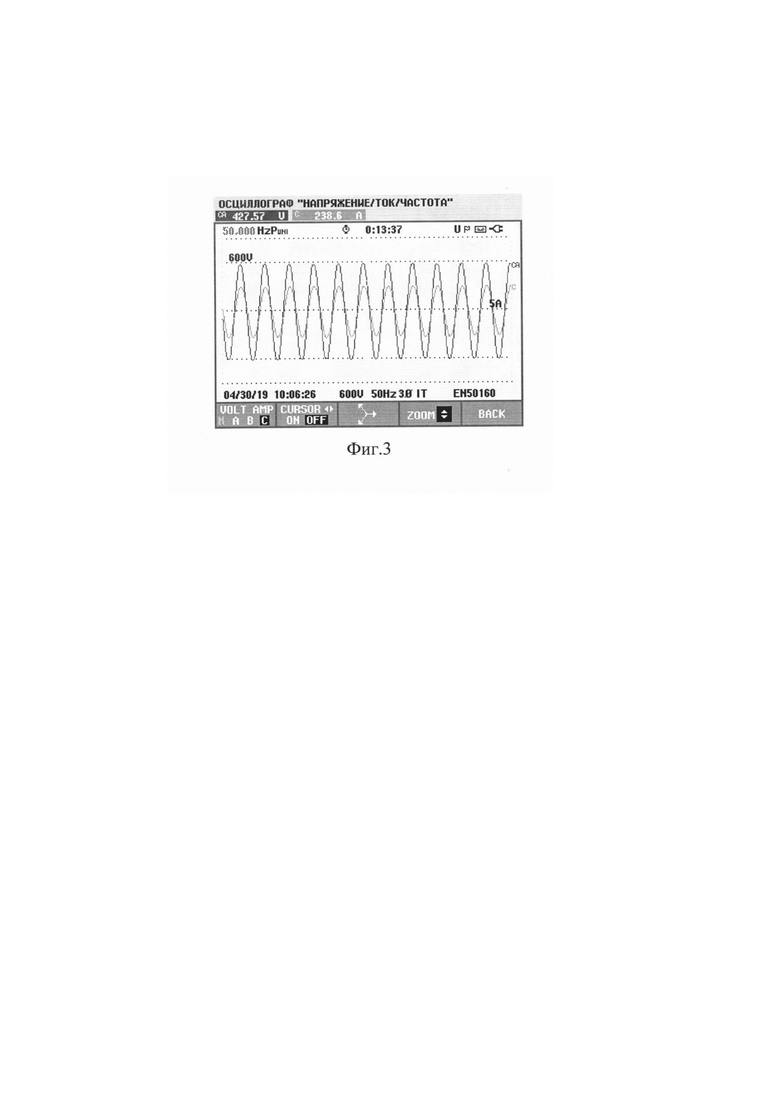
Вычислительная процедура, используемая в алгоритме управления АИН на фиг. 2, повторялась каждые 60 мкс. Это позволило работать АИН в электроприводе, формируя трехфазное синусоидальное напряжение с выходной частотой до 150 Гц и амплитудой выходного напряжения до Um=650 вольт.
На фиг. 3 приведена осциллограмма напряжения и тока в одной из обмоток трехфазного синхронного двигателя мощностью 150 кВт при номинальном моменте нагрузки и при скорости 3000 об/мин. Управление электроприводом осуществлялось по «упрощенному» алгоритму фиг. 2. Осциллограмма получена с помощью измерительной системы FLUKE - 435.
Экспериментальная проверка электропривода с «упрощенным» алгоритмом управления АИН, показала устойчивую его работу в широком диапазоне скоростей и моментов нагрузки. Однако, режим Cosϕ=1 поддерживался лишь при одном установившемся значении момента нагрузки М=Мн. При меньших значениях М, в том числе и при моменте нагрузки близком к холостому ходу, ток в обмотках статора снижался, но не пропорционально величине момента, а это значит, что в токе статора возникала реактивная (размагничивающая/подмагничивающая) составляющая. Потери энергии по сравнению с алгоритмом по схеме фиг. 1 получались незначительно выше.
Предлагаемый способ управления АИН обеспечивает плавный пуск и устойчивую (без колебаний) работу электропривода на заданной скорости в широком диапазоне моментов нагрузки с помощью лишь сигнала задания ωзад, обратной связи по току iA, iB, iC синхронной машины (сигналов датчиков тока Дm) и достаточно «короткой» по времени процедуры в вычислителе по алгоритму фиг. 1 или фиг. 2.
Заметим, предлагаемый способ пригоден для управления синхронными двигателями и с электромагнитным возбуждением, в том числе и для управления высоковольтными двигателями, если их питание осуществляется от высоковольтного инвертора или преобразователя частоты.
Источники информации
1. Мищенко В.А., Мищенко Н.И., Мищенко А.В. Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе и электропривод для осуществления этого способа. Патент Российской Федерации №2141719 от 25.03.1998
2. Донской Н.В. Регулируемые электроприводы переменного тока. Чебоксары. Издательство Чувашского государственного университета, 2011.
3. Хачатуров Д.В. Способ управления синхронным электродвигателем на постоянных магнитах. Патент Российской Федерации №2683586 от 20.03.2018
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С СИНХРОННЫМ ДВИГАТЕЛЕМ БЕЗ ДАТЧИКА ПОЛОЖЕНИЯ РОТОРА | 2020 |
|
RU2746795C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2522675C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОКОМ ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2239936C2 |
| ЧАСТОТНО-ТОКОВЫЙ ЭЛЕКТРОПРИВОД И СПОСОБ КОММУТАЦИИ ВЕНТИЛЕЙ В ЕГО СХЕМЕ | 2013 |
|
RU2548679C2 |
| СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2390091C1 |
| Способ управлением током возбуждения синхронного электродвигателя в послеаварийных процессах энергосистемы | 2017 |
|
RU2658741C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2651812C2 |
| СПОСОБ ИЗМЕРЕНИЯ МГНОВЕННОГО КОЭФФИЦИЕНТА МОЩНОСТИ ТРЕХФАЗНОЙ СЕТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2627986C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2015 |
|
RU2584142C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2438229C1 |

Изобретение относится к области электротехники и может быть использовано в системах частотного регулирования скорости синхронных двигателей, питаемых от автономного инвертора напряжения, в режиме бездатчикового управления. Техническим результатом является обеспечение экономичного (Cosϕ=1) и устойчивого (без колебаний) режима вращения двигателя в условиях изменяющегося момента нагрузки на его валу. Алгоритм реализуется с использованием только сигнала обратной связи по току нагрузки на выходе инвертора. Для управления скоростью синхронного двигателя с помощью автономного инвертора, содержащего каналы регулирования амплитудой и частотой напряжения обмотки статора: в канал регулирования амплитуды вводится сигнал ΔU; в канал регулирования частоты вводится сигнал в виде фазового сдвига (на угол ϕ) с положительным знаком; для управления автономным инвертором используются сигналы датчиков тока Дm после их преобразований из трехфазной (физической) модели iA, iB, iC в эквивалентную двухфазную модель. Работа устройства может выполняться без использования сигналов блока интегрирования и блока суммирования. 1 з.п. ф-лы, 3 ил.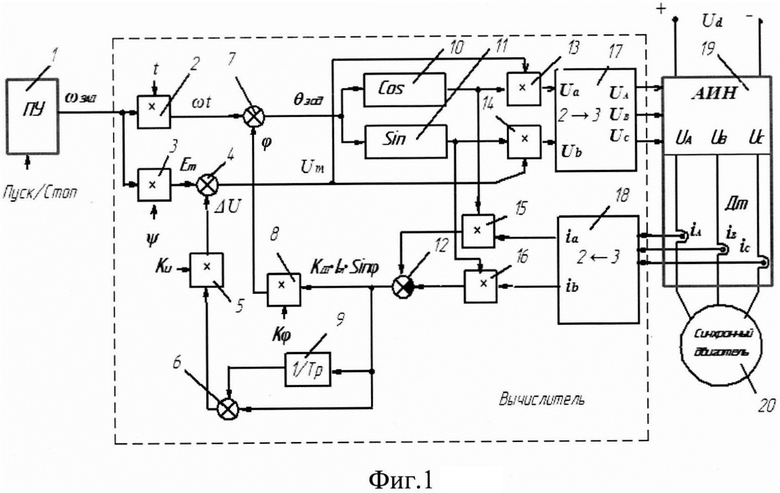
1. Способ управления скоростью синхронного двигателя с помощью автономного инвертора, содержащего каналы регулирования амплитудой и частотой напряжения обмотки статора, отличающийся тем, что с целью устойчивого вращения ротора двигателя при наиболее выгодном значении коэффициента потребляемой двигателем мощности (Cosϕ=1):
- в канал регулирования амплитуды вводится сигнал ΔU, увеличивающий амплитуду, если в обмотках статора возникает ток, опережающий напряжение статора и, соответственно, уменьшающий ее, если ток статора становится отстающим;
- в канал регулирования частоты вводится сигнал в виде фазового сдвига (на угол ϕ) с положительным знаком, если в обмотках статора возникает ток, опережающий напряжение, и, соответственно, с отрицательным знаком, если ток в обмотках оказывается отстающим;
- для управления автономным инвертором используются сигналы датчиков тока Дm после их преобразований из трехфазной (физической) модели iA, iB, iC в эквивалентную двухфазную модель для ввода в вычислитель
ia=КДТIm[Sin(ωt+ϕ)],
ib=КДТIm[Cos(ωt+ϕ)]
и, повторяющейся вычислительной процедуры,
(ia⋅Cosωt-ib⋅Sinωt)Кu(1+Tp)=Кu(1+Тр)⋅КДТ⋅ImSinϕ=ΔU≠0;
(ia⋅Cosωt-ib⋅Sinωt)Кϕ=Кϕ⋅КДТ⋅ImSinϕ→0 при ϕ→0;
где КДТ - коэффициент преобразования датчиков тока;
Im - амплитудное значение токов фазных обмоток статора, А;
ωзад - заданная угловая частота автономного инвертора, рад/с;
ϕ - угол сдвига между током и напряжением в обмотке статора, в рад;
ΔU - приращение задания напряжения статора для автономного инвертора, при котором ϕ→0;
Sin и Cos - тригонометрические функции от угла θзад=ωзад⋅t+ϕ.
2. Способ по п. 1, отличающийся тем, что с целью сокращения вычислительных операций из алгоритма исключаются интегрирование с помощью блока 9 и суммирование с помощью блока 6, работа устройства выполняется без использования сигналов этих блоков.
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Способ управления синхронным электродвигателем на постоянных магнитах | 2018 |
|
RU2683586C1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| GB 14262674 A, 26.01.1997 | |||
| JP S58186339 A, 31.10.1983 | |||
| US 2011043149 A1, 24.02.2011 | |||
| WО 2009040884 A1, 02.04.2009. | |||

