Изобретение относится к области навигации, а именно к определению координат подводных объектов.
Известны гидроакустические синхронные дальномерные навигационные системы, содержащие в общей для них части донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, блоки преобразования временных интервалов в дистанции и вычислитель координат объекта навигации [см., например, Милн П.Х. Гидроакустические системы позиционирования: пер. с англ. - Л.: Судостроение. - 1989. - 272 с. - С.49-60; патент РФ 713278, кл. G01S 15/08, 1978 г.; патент РФ 2032187, кл. G01S 15/08, 1995 г.].
Все перечисленные элементы этих аналогов входят и в состав заявляемой системы навигации.
Работа этих аналогов основана на измерении интервалов времени, необходимых для прохождения звуковых сигналов от объекта навигации до приемоответчиков донной базы, последующем пересчете этих интервалов в дистанции между объектом навигации и приемоответчиками и определении координат объекта навигации по полученным дистанциям.
Причиной, препятствующей достижению в этих аналогах технического результата, обеспечиваемого изобретением, является относительно малая дальность действия системы.
Существенно бóльшую дальность действия имеют навигационные системы, защищенные патентом РФ 2289149, кл. G01S 13/08, 2006 г., и патентом РФ 2032187, кл. G01S 15/08, 1992 г. Они имеют те же общие с заявляемой системой существенные признаки, что и указанные выше аналоги, однако помимо этих элементов в их состав входят дополнительные донные базы из маяков-пингеров, жестко связанных с приемоответчиками основных донных баз, и дополнительный комплект аппаратуры для измерения временных интервалов времени прохождения звуковых сигналов и преобразования их в дистанции между объектом навигации и излучателями маяков-пингеров.
Причинами, препятствующими достижению в этих аналогах технического результата, обеспечиваемого изобретением, являются большой объем оборудования, необходимого для реализации системы, сложность ее изготовления и калибровки.
Наиболее близкой по технической сущности к заявляемой системе (прототипом) является гидроакустическая навигационная система, защищенная патентом РФ 2371738, кл. G01S 15/08, 2008 г. Она содержит базу из М гидроакустических приемоответчиков с различными частотами ответа, размещенные на объекте навигации гидроакустический приемопередатчик, аппаратуру измерения временных интервалов распространения сигналов с их последующим преобразованием в дистанции между объектом навигации и гидроакустическими приемопередатчиками навигационной базы и навигационный вычислитель для определения координат объекта навигации с соответствующим программно-математическим обеспечением. Часть из М гидроакустических приемопередатчиков навигационной базы закреплена на морском дне, остальные установлены на водной поверхности и оснащены приемниками сигналов спутниковых радионавигационных систем. Приемная антенна приемопередатчика состоит из четырех гидрофонов. Каждая секция антенны состоит из двух одноканальных и одного многоканального модулей, установленных на линейном несущем кронштейне, выполненном перфорированным. Антенны выполнены в форме сферической поверхности и размещены на стальной пластине.
Все перечисленные признаки системы-прототипа, кроме особенностей выполнения антенны приемопередатчика, установленного на объекте навигации, являются существенными признаками и заявляемой системы.
Работа системы-прототипа основана на тех же принципах, что и работа упомянутых выше систем-аналогов. Разница лишь в том, что координаты гидроакустических приемоответчиков, установленных на водной поверхности, не заранее определенные, фиксированные, а "дрейфующие" и определяются посредством спутниковых навигационных систем с помощью радионавигационных приемников сигналов этих систем.
Причиной, препятствующей достижению в системе-прототипе технического результата, достигаемого в изобретении, является достаточно ограниченная дальность действия, обусловленная энергетической дальностью связи между объектом навигации и гидроакустическими приемоответчиками.
Технической задачей, на решение которой направлено изобретение, является увеличение дальности действия системы.
Технический результат достигается тем, что в известной гидроакустической системе навигации антенна приемопередатчика объекта навигации выполнена с электронно-управляемой формой характеристики направленности.
Для достижения технического результата в известной гидроакустической системе навигации, содержащей навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа, размещенные на объекте навигации гидроакустический приемопередатчик, аппаратуру измерения временных интервалов распространения сигналов с их последующим преобразованием в дистанции между объектом навигации и гидроакустическими приемопередатчиками навигационной базы и навигационный вычислитель для определения координат объекта навигации с соответствующим программно-математическим обеспечением, часть из М гидроакустических приемопередатчиков навигационной базы закреплена на морском дне, остальные установлены на водной поверхности и оснащены приемниками сигналов спутниковых радионавигационных систем, антенна гидроакустического приемопередатчика, установленного на объекте навигации, выполнена с электронно-управляемой формой характеристики направленности.
Отсутствуют какие-либо источники информации, в которых вновь введенные особенности выполнения антенны приемопередатчика были бы описаны в совокупности с остальными элементами и связями заявляемой системы навигации. Поэтому предлагаемую систему навигации следует считать новой и имеющей изобретательский уровень.
Сущность изобретения поясняется фиг.1, на которой показаны подводный грунт 1, водная поверхность 2, а также взаимное расположение объекта 3 навигации, гидроакустических маяков-ответчиков 4.1, 4.2 и 4.3, закрепленных на морском дне, и гидроакустических дрейфующих маяков-ответчиков 5.1 и 5.2, расположенных на воде.
Объект 3 наведения оснащен:
- приемопередающей гидроакустической аппаратурой с приемопередающей антенной, характеристика направленности которой имеет электронное управление как по направлению акустической оси, так и по ширине основного максимума и уровню добавочных максимумов;
- аппаратурой для измерения временных интервалов распространения звуковых сигналов от объекта 3 навигации до приемоответчиков 4.1, 4.2, 4.3, 5.1 и 5.2 и обратно и последующего преобразования их в дистанции;
- навигационным вычислителем для определения координат объекта 3 навигации с соответствующим программно-математическим обеспечением.
Каждый из донных маяков-ответчиков 4.1, 4.2 и 4.3 представляет собой гидроакустический приемоответчик типа ГМО-600 с характеристикой направленности антенны, охватывающей верхнюю полусферу.
Каждый из приемопередатчиков представляет собой устройство, состоящее из полиуретанового корпуса, на котором установлена мачта с размещенной на ней спутниковой антенной. Внутри корпуса установлены аппаратура приемника сигналов спутниковых радионавигационных систем типа СНИМ, а также гидроакустическая приемопередающая аппаратура, в состав которой входит гидроакустическая антенна с характеристикой направленности, охватывающей нижнюю полусферу.
С объекта 3 навигации по всем направлениям, в которых ожидается наличие маяков-ответчиков, на одной и той же частоте излучаются сигналы запроса. Через промежутки времени, соответствующие дальности маяков-ответчиков от объекта 3 навигации, маяки-ответчики принимают этот сигнал и излучают в направлении объекта 3 навигации сигналы ответа, причем каждый на своей заранее известной фиксированной частоте. Эти сигналы принимаются приемопередатчиком на объекте 3 навигации. Там же измеряются интервалы времени между излучением сигнала запроса в направлении каждого из маяков-ответчиков и получением от него сигнала ответа. Эти интервалы времени пересчитываются в дистанции между объектом 3 навигации и каждым из маяков-ответчиков. С каждым излучением сигнала запроса описанные операции повторяются, и навигационный вычислитель уточняет координаты объекта 3 навигации и скорость их изменения.
Координаты донных маяков-ответчиков 4.1, 4.2 и 4.3 определяются заранее в процессе их установки. Частоты сигналов ответа соответствуют этим координатам. Координаты дрейфующих маяков-ответчиков 5.1 и 5.2, оборудованных приемниками сигналов спутниковых радионавигационных систем, постоянно измеряются с помощью этих приемников с высокой точностью в реальном масштабе времени. Например, точность определения координат с помощью измерительного модуля СНИМ фирмы "Навис" не хуже 5 метров. Информация об этих координатах может быть передана на объект 3 навигации путем соответствующего кодирования сигнала ответа на запрос объекта 3 навигации методом фазовой манипуляции и декодирования этого сигнала в приемопередатчике.
Таким образом, в измерительной аппаратуре объекта 3 навигации формируется информация о дистанциях до маяков-ответчиков и координатах последних. Эта информация поступает в навигационный вычислитель, в котором по этой информации в соответствии с заданными алгоритмами и определяются координаты объекта 3 навигации и скорости их изменения.
Следует отметить, что точность определения координат объекта 3 навигации в значительной степени определяется количеством маяков-ответчиков, одновременно попадающих в зону действия приемоответчика объекта 3 навигации, которая определяется энергетической дальностью связи между объектом 3 навигации и маяками-ответчиками. Указанная энергетическая дальность в свою очередь зависит от коэффициента усиления и чувствительности приемопередающей антенны. Энергетическая дальность и оба эти параметра увеличиваются с уменьшением ширины основного максимума характеристики направленности антенны.
Антенна приемопередатчика объекта 3 навигации имеет электронное управление характеристикой направленности. Такая антенна может быть реализована на базе многоэлементной фазированной антенной решетки типа ПГА-1, состоящей из гидроакустических пьезокерамических преобразователей. Наличие в заявляемой системе навигации электронного управления характеристикой направленности антенны позволяет существенно увеличить энергетическую дальность связи объекта 3 навигации по сравнению с системой-прототипом и остальными аналогами.
В системе-прототипе и в остальных аналогах характеристика направленности антенны приемопередатчика объекта навигации неуправляема. Поэтому энергетический потенциал приемопередатчика объекта навигации в режиме излучения равномерно распределен во всех направлениях. Аналогично в режиме приема чувствительность приемника одинакова для всех направлений прихода сигнала. Это существенно снижает потенциально возможные коэффициент усиления и чувствительность антенны.
В предлагаемой системе как основной, так и дополнительные максимумы характеристики направленности антенны приемопередатчика имеют управляемые направление и ширину. В принципе практически весь энергопотенциал передатчика можно сосредоточить в одном направлении, установив минимальную ширину основного максимума характеристики направленности и направив этот максимум на нужный маяк-ответчик. Антенна управляется навигационным вычислителем. Число лучей (число основного и дополнительных максимумов характеристики направленности антенны) поддерживается равным числу обнаруженных маяков-ответчиков, а их ширина - обратно пропорциональной дистанции соответствующего маяка-ответчика до объекта 3 навигации. В паузах между излучением сигналов запросов и получением ответов осуществляется поиск по направлению новых маяков дополнительными узкими лучами.
Таким образом, потенциально достижимые энергопотенциал в режиме передачи и чувствительность в режиме поиска у приемопередатчика в заявляемой системе выше, чем в системе-прототипе и аналогах. Поэтому в ней больше энергетическая дальность связи приемопередатчика и выше точность определения координат объекта навигации.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| Способ определения координат подводного объекта гидроакустической системой подводной навигации с юстировочным маяком | 2016 |
|
RU2649073C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2353949C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2468388C2 |
| Гидроакустическая дальномерная система навигации | 2016 |
|
RU2624980C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
Использование: в гидроакустических навигационных системах. Сущность: гидроакустическая навигационная система содержит навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа, гидроакустический приемопередатчик, аппаратуру измерения временных интервалов распространения сигналов, часть из М гидроакустических приемоответчиков навигационной базы закреплена на морском дне, остальные установлены на водной поверхности и оснащены приемниками сигналов спутниковых радионавигационных систем. Антенна гидроакустического приемопередатчика выполнена с электронно-управляемой формой характеристики направленности, при этом управление формой характеристики направленности осуществляется с помощью навигационного вычислителя, число лучей характеристики направленности поддерживается равным числу маяков-ответчиков, а их ширина - обратно пропорциональной дистанциям соответствующих маяков ответчиков до объекта навигации. Технический результат: увеличение дальности действия системы. 1 ил.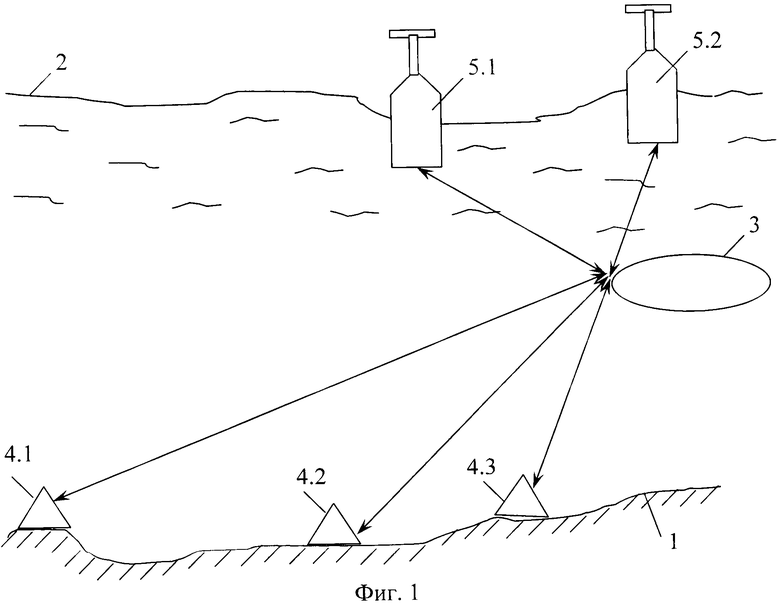
Гидроакустическая навигационная система, содержащая навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа, размещенные на объекте навигации гидроакустический приемопередатчик, аппаратуру измерения временных интервалов распространения сигналов с их последующим преобразованием в дистанции между объектом навигации и гидроакустическими приемопередатчиками навигационной базы и навигационный вычислитель для определения координат объекта навигации с соответствующим программно-математическим обеспечением, часть из М гидроакустических приемоответчиков навигационной базы закреплена на морском дне, остальные установлены на водной поверхности и оснащены приемниками сигналов спутниковых радионавигационных систем, отличающаяся тем, что антенна гидроакустического приемопередатчика, установленного на объекте навигации, выполнена с электронно-управляемой формой характеристики направленности, при этом управление формой характеристики направленности осуществляется с помощью навигационного вычислителя, число лучей характеристики направленности поддерживается равным числу маяков-ответчиков, а их ширина - обратно пропорциональной дистанциям соответствующих маяков ответчиков до объекта навигации.
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| БСЭ /Под ред | |||
| A.M | |||
| Прохорова, т.27, третье издание | |||
| - М.: Советская энциклопедия, 1977, с.182-183 | |||
| US 2007025185 А1, 01.02.2007 | |||
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| Вычислительное устройство для управления лучом фазированной антенной решетки | 1991 |
|
SU1829041A1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ МЕЛКОГО МОРЯ | 1999 |
|
RU2158431C1 |
| Гошин Г.Г | |||
| Устройства СВЧ и Антенны, часть 2 | |||
| Антенны, учебное пособие | |||
| - Томск, 2003, с.100-129. | |||

