Изобретение относится к пространственным манипуляторам параллельной структуры и может быть использовано в робототехнике, автоматическим линиям в машиностроении, испытательных стендах, сборочных конвейерах, обрабатывающих центрах и технологических установках для смещения между собой в рабочем пространстве двух подвижных объектов и разных рабочих органов.
Известен пространственный манипулятор, содержащий опорное основание и приводное исполнительное устройство, выполненное в виде подвижной платформы, взаимосвязанной с опорным основанием посредством шести раздвижных опорных ног, двенадцати сложных сферических шарниров с приводом от шести линейных двигателей в виде гидроцилиндров (книга Вульфсон И.И. и др. «Механика машин», Москва: Высшая школа, 1996, с. 28, рис. 1.20, схема «Платформа Стюарта») - аналог.
Недостатками известного пространственного манипулятора являются сложная конструкция и система управления одновременно всеми шестью приводными двигателями из-за их связанной кинематики, а также ограниченная зона рабочего пространства из-за возможности относительного манипулирования только одном рабочим органом, ограниченно перемещаемым вместе с подвижной платформой в узких пределах опорного основания.
Наиболее близким по своей сущности и достигаемому эффекту является пространственный манипулятор относительного манипулирования, содержащий опорного основание и установленной на нем приводное исполнительное устройство, выполненное в виде круглой подвижной платформы, взаимосвязанной с опорным основанием посредством шести подвижных ног с изменяемыми замкнутыми контурами, образованными 24-мя многошарнирными звеньями, 12-ю сферическими шарнирами на окружностях подвижной платформы и опорного основания, а также 24-мя цилиндрическими шарнирами, управляемыми 6-ю приводными вращательными двигателями (книга Смелягин А.И. Структура машин, механизмов и конструкций. Учебное пособие. - Москва: ИНФА-М, 2019, с. 154, рис. 2.74, схема сложного пространственного манипулятора платформенного типа) - прототип.
Недостатками указанного пространственного манипулятора относительного манипулирования являются:
1. Сложная конструкция из десятков собираемых между собой многошарнирных звеньев, сферических и цилиндрических шарниров.
2. Сложная система управления связанной кинематикой одновременно шестью приводными двигателями для перемещения всего одной платформы с рабочим органом.
3. Ограниченная (из-за возникающих областей полной неуправляемости/так называемой «сингулярности» и возможности относительного манипулирования только одном рабочим органом) зона рабочего пространства.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции за счет применения простых цилиндрических шарниров с уменьшенным числом соединяемых звеньев, а также в упрощении системы управления раздельной кинематикой манипулятора и расширении зоны его рабочего пространства за счет взаимного перемещения между собой двух рабочих органов на двух подвижных платформах, установленных на общем опорном основании.
Получение технического результата достигается за счет того, что пространственный манипулятор относительного манипулирования содержит опорное основание и установленное на нем подвижное исполнительное устройство, выполненное в виде двух спаренных между собой подвижных платформ, взаимосвязанных через многоподвижное вращательное соединение и соединенных с опорным основанием посредством подвижных стержневых опор, присоединяемых к спаренным подвижным платформам через сферические шарниры с тремя степенями свободы.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5. фиг. 6, фиг. 7 и фиг. 8.
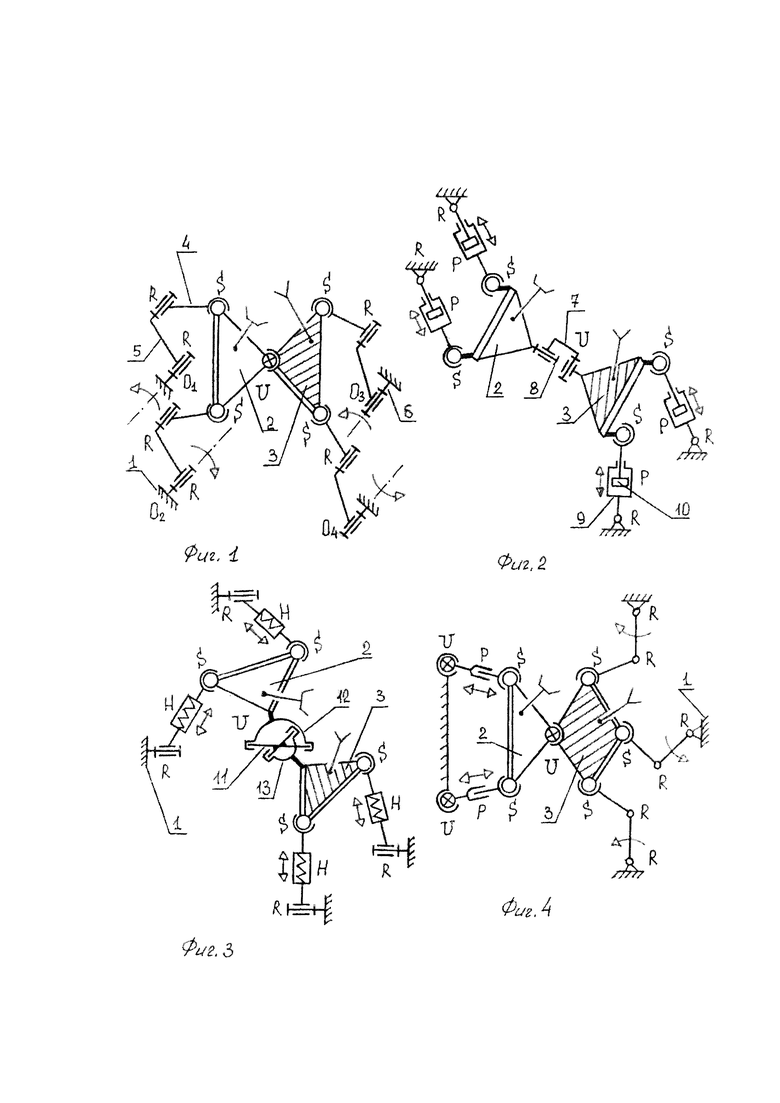
На фиг. 1 изображен общий вид пространственного манипулятора относительного манипулирования, содержащего опорное основание 1 и установленное на нем подвижное исполнительное устройство, выполненное в виде двух спаренных между собой подвижных платформ 2 и 3, взаимосвязанных с опорным основанием 1 посредством четырех подвижных стержневых опор SRR и взаимосвязанных между собой посредством сферического шарнира U с двумя степенями свободы. Обе платформы 2 и взаимосвязаны со стержневыми опорами SRR через сферические шарниры S с тремя степенями свободы. Подвижные стержневые опоры SRR выполнены в виде двухшарнирных соединительных рычагов 4 и 5, которые подвижно соединены между собой, а также с опорным основанием 1 через цилиндрические шарниры R,R с параллельными между собой осями вращения 6 соединяемых звеньев и снабжены приводными вращательными кинематическими парами О1, О2, О3, О4 для образования пространственного манипулятора с четырьмя степенями свободы.
На фиг. 2 представлен вариант выполнения пространственного манипулятора относительного манипулирования с четырьмя степенями свободы, в котором многоподвижное вращательное соединение U спаренных подвижных платформ 2 и 3 выполнено в виде двух двухшарнирных соединительных рычагов 7 и 8, выполненных со взаимно перпендикулярным расположением на каждом из них осей цилиндрических шарниров R. Каждая из четырех подвижных стержневых опор SRR снабжена приводной поступательной кинематической парой Р в виде подвижного гидроцилиндра 9 с расположенным в нем поршнем со штоком 10.
На фиг. 3 представлен вариант выполнения пространственного манипулятора относительного манипулирования с четырьмя степенями свободы, в котором многоподвижное вращательное соединение спаренных подвижных платформ U выполнено в виде крестовины 11 с расположенными на ее концах в одной плоскости цилиндрическими шарнирами R со взаимно перпендикулярными осями вращения соединяемых звеньев для подвижного соединения крестовины 11 с двумя круговыми звеньями 12 и 13, а каждая из четырех подвижных стержневых опор SHR снабжена приводной самотормозящейся винтовой кинематической парой Н.
На фиг. 4 представлен вариант выполнения пространственного манипулятора относительного манипулирования с пятью степенями свободы, в котором спаренные подвижные платформы 2 и 3 взаимосвязаны между собой через сферический шарнир U с двумя степенями свободы и выполнены в виде сочетания треугольного (платформа 2) и четырехугольного (платформа 3) звеньев. Треугольная спаренная платформа 2 взаимосвязана с опорным основанием 1 через две подвижные стержневые опоры SPU, которые соединены с подвижным основанием 1 через сферические шарниры U с двумя степенями свободы и снабжены двумя приводными поступательными парами Р. Четырехугольная спаренная платформа 3 взаимосвязана с опорным основанием 1 через три подвижные стержневые опоры SRR с тремя приводными вращательными кинематическими парами R с параллельными между собой осями вращения цилиндрических шарниров.
На фиг. 5 представлен вариант выполнения пространственного манипулятора относительного манипулирования с шестью степенями свободы, в котором спаренные подвижные платформы 2 и 3 выполнены в виде сочетания двух четырехугольных звеньев, взаимосвязанных через сферический шарнир S с тремя степенями свободы. Спаренная подвижная платформа 2 взаимосвязана с опорным основанием 1 через три подвижные стержневые опоры SHU, которые соединены с основанием 1 через сферические шарниры U с двумя степенями свободы и снабжены тремя приводными винтовыми кинематическими парами Н. Другая спаренная подвижная платформа 3 взаимосвязана с опорным основанием 1 через три подвижные стержневые опоры SRR с тремя приводными вращательными кинематическими парами R с параллельными между собой осями вращения цилиндрических шарниров.
На фиг. 6 представлен вариант выполнения пространственного манипулятора относительного манипулирования с шестью степенями свободы, в котором спаренные подвижные платформы 2 и 3 выполнены в виде сочетания двух четырехугольных звеньев, взаимосвязанных через сферический шарнир S с тремя степенями свободы. Спаренная подвижная платформа 2 взаимосвязана с опорным основанием 1 через три подвижные стержневые опоры SPU, которые соединены с опорным основанием 1 через сферические шарниры U с двумя степенями свободы и снабжены тремя приводными поступательными кинематическими парами Р. Другая спаренная подвижная платформа 3 взаимосвязана с опорным основанием 1 через три подвижные стержневые опоры SPR, которые соединены с опорным основанием 1 через вращательные кинематические пары R с параллельными между собой осями вращения цилиндрических шарниров.
На фиг. 7 представлен вариант выполнения пространственного манипулятора относительного манипулирования с тремя степенями свободы, в котором спаренные подвижные платформы 2 и 3 выполнены в виде сочетания двух треугольных звеньев, соединенных между собой через сферический шарнир S с тремя степенями свободы. Спаренная подвижная платформа 2 взаимосвязана с опорным основанием 1 через три подвижные стержневые опоры RR, образующие пространственный трехопорный параллелограмм и выполненные в виде трех двухшарнирных соединительных рычагов 4, 5, 6 одинаковой длины l, равной расстоянию между параллельными осями отверстий цилиндрических шарниров на концах каждого из этих рычагов, а рычаг 6 снабжен приводной вращательной кинематической парой R. Другая спаренная подвижная платформа 3 взаимосвязана с опорным основанием 1 через две подвижные стержневые опоры SRR с двумя приводными вращательными кинематическими парами R, выполненными с параллельными между собой осями вращения цилиндрических шарниров.
На фиг. 8 представлен вариант выполнения пространственного манипулятора относительного манипулирования с тремя степенями свободы, в котором спаренные подвижные платформы 2 и 3 выполнены в виде сочетания двух треугольных звеньев, соединенных между собой через сферический шарнир S с тремя степенями свободы.
Спаренная подвижная платформа 2 взаимосвязана с опорным основанием 1 через три подвижные стержневые опоры RR, образующие пространственный трехопорный антипараллелограмм и выполненные в виде трех двухшарнирных соединительных рычагов одинаковой длины l, из которых два рычага 4 и 5 установлены параллельно и соосно между собой, а третий рычаг 6 установлен со скрещиванием с двумя упомянутыми рычагами 4 и 5 и снабжен приводной вращательной кинематической парой R. Другая спаренная подвижная платформа 3 взаимосвязана с опорным основанием 1 через две подвижные стержневые опоры SRR с двумя приводными вращательными кинематическими парами R, выполненными с параллельными между собой осями вращения цилиндрических шарниров.
Работа представленного пространственного манипулятора относительного манипулирования заключается в следующем.
Заданное движение приводных кинематических пар (в направлении движения ведущих звеньев, которое указано стрелками на фиг. 1 - фиг. 8) посредством подвижных стержневых опор преобразуется в требуемое перемещение в рабочем пространстве манипулятора каждой из спаренных подвижных платформ 2 и 3 в прямоугольной декартовой системе координат X, Y, Z (вокруг или вдоль этих координат), что приводит к образованию рабочих зон каждой из спаренных платформ 2 и 3. В данном манипуляторе эти рабочие зоны суммируются и образуют расширенное рабочее пространство относительного манипулирования между собой установленных на спаренных платформах 2 и 3 разных объектов (например, в виде детали и обрабатывающего инструмента или в виде двух собираемых между собой на конвейере разных деталей и узлов).
Достигаемый в предлагаемом пространственном манипуляторе относительного манипулирования положительный эффект заключается в следующем:
1. Упрощение конструкции пространственного манипулятора относительного манипулирования за счет применения простых цилиндрических шарниров и их сборки с параллельными между собой осями вращения соединяемых звеньев.
2. Упрощение системы управления указанным манипулированием в рабочем пространстве спаренными подвижными платформами с установленными на них разными рабочими органами за счет раздельной управляемой кинематики этих платформ.
3. Расширение рабочего пространства относительного манипулирования между собой двух разных объектов на выходе манипулятора за счет суммирования отдельных рабочих пространств каждой из спаренных платформ, которые включают разные требуемые виды движений рабочих органов:
а) раздельное вращение вокруг параллельных осей;
б) прямолинейное поступательное перемещение вдоль осей X, Y, Z;
в) плоскопараллельное криволинейное поступательное перемещение объектов с сохранением их заданной (горизонтальной, вертикальной или угловой) ориентации во всем рабочем пространстве манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| ТРЁХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2024 |
|
RU2835540C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |

Изобретение относится к пространственным манипуляторам параллельной структуры и может быть использовано в робототехнике, автоматических линиях в машиностроении, испытательных стендах, сборочных конвейерах, обрабатывающих центрах и технологических установках для смещения между собой в рабочем пространстве двух подвижных объектов и разных рабочих органах. Пространственный манипулятор относительного манипулирования содержит опорное основание и установлено на нем подвижное исполнительное устройство, выполненное в виде двух спаренных между собой подвижных платформ, взаимосвязанных через многоподвижное вращательное соединение и соединенных с опорным основанием посредством подвижных стержневых опор, присоединяемых к спаренным подвижным платформам через сферические шарниры с тремя степенями свободы. Технический результат заключается в упрощении конструкции и системы управления раздельной кинематикой спаренных платформ в расширенном рабочем пространстве, с осуществлением вращения вокруг параллельных осей, поступательного и плоскопараллельного движения объектов с сохранением их заданной ориентации (горизонтальной, вертикальной, угловой). 9 з.п. ф-лы, 8 ил.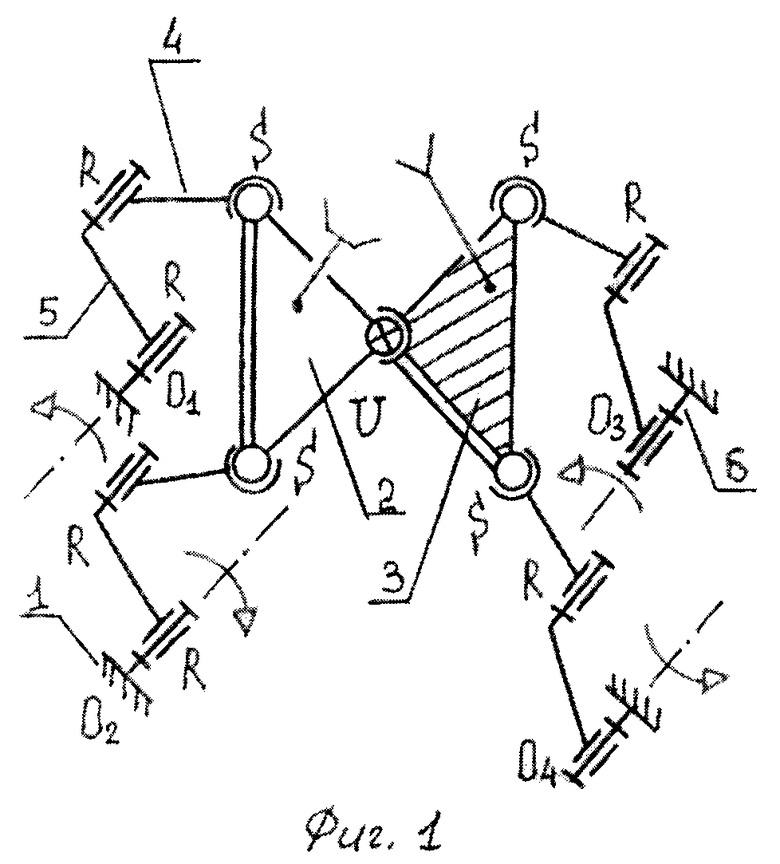
1. Пространственный манипулятор относительного манипулирования, содержащий опорное основание и установленное на нем подвижное исполнительное устройство, отличающийся тем, что подвижное исполнительное устройство выполнено в виде двух спаренных между собой подвижных платформ, взаимосвязанных через многоподвижное вращательное соединение и соединенных с опорным основанием посредством подвижных стержневых опор, присоединяемых к спаренным подвижным платформам через сферические шарниры с тремя степенями свободы.
2. Пространственный манипулятор относительного манипулирования по п. 1, отличающийся тем, что спаренные подвижные платформы выполнены в виде сочетания двух треугольных звеньев и взаимосвязаны с опорным основанием посредством четырех подвижных стержневых опор, многоподвижное вращательное соединение спаренных подвижных платформ выполнено в виде сферического шарнира с двумя степенями свободы, подвижные стержневые опоры выполнены в виде двухшарнирных соединительных рычагов, которые подвижно соединены между собой, а также с опорным основанием через цилиндрические шарниры с параллельными между собой осями вращения соединяемых звеньев и снабжены приводными вращательными кинематическими парами для образования пространственного манипулятора с четырьмя степенями свободы.
3. Пространственный манипулятор относительного манипулирования по п. 1, отличающийся тем, что многоподвижное вращательное соединение спаренных подвижных платформ выполнено в виде двух двухшарнирных соединительных рычагов, выполненных со взаимно перпендикулярным расположением на каждом из них осей цилиндрических шарниров, а каждая из подвижных стержневых опор снабжена приводной поступательной кинематической парой в виде подвижного гидроцилиндра с расположенным в нем поршнем со штоком.
4. Пространственный манипулятор относительного манипулирования по п. 1, отличающийся тем, что многоподвижное вращательное соединение спаренных подвижных платформ выполнено в виде крестовины с расположенными на ее концах в одной плоскости цилиндрическими шарнирами со взаимно перпендикулярными осями вращения соединяемых звеньев для подвижного соединения крестовины с двумя круговыми звеньями, сблокированными со спаренными подвижными платформами, а каждая из подвижных стержневых опор снабжена приводной самотормозящейся винтовой кинематической парой.
5. Пространственный манипулятор относительного манипулирования по п. 1, отличающийся тем, что спаренные подвижные платформы выполнены в виде сочетания треугольного и четырехугольного звеньев, многоподвижное вращательное соединение которых выполнено в виде сферического шарнира с двумя степенями свободы, треугольная спаренная платформа взаимосвязана с опорным основанием через две подвижные стержневые опоры, которые соединены с последним через сферические шарниры с двумя степенями свободы и снабжены двумя приводными поступательными парами, а четырехугольная спаренная платформа взаимосвязана с опорным основанием через три подвижные стержневые опоры с тремя приводными вращательными кинематическими парами с параллельными между собой осями вращения цилиндрических шарниров для образования пространственного манипулятора с пятью степенями свободы.
6. Пространственный манипулятор относительного манипулирования по п. 1, отличающийся тем, что спаренные подвижные платформы выполнены в виде сочетания двух четырехугольных звеньев, многоподвижное вращательное соединение которых выполнено в виде сферического шарнира с тремя степенями свободы, одна из спаренных подвижных платформ взаимосвязана с опорным основанием через три подвижные стержневые опоры, которые соединены с последним через сферические шарниры с двумя степенями свободы и снабжены тремя приводными винтовыми кинематическими парами, а другая спаренная подвижная платформа взаимосвязана с опорным основанием через три подвижные стержневые опоры с тремя приводными вращательными кинематическими парами с параллельными между собой осями вращения цилиндрических шарниров для образования пространственного манипулятора с шестью степенями свободы.
7. Пространственный манипулятор относительного манипулирования по п. 1, отличающийся тем, что спаренные подвижные платформы выполнены в виде сочетания двух четырехугольных звеньев, соединенных между собой через сферический шарнир с тремя степенями свободы, одна из спаренных подвижных платформ взаимосвязана с опорным основанием через три подвижные стержневые опоры, которые соединены с последним через сферические шарниры с двумя степенями свободы, а другая спаренная подвижная платформа соединена с опорным основанием через цилиндрические шарниры с параллельными между собой осями вращения для образования пространственного манипулятора с шестью степенями свободы, содержащего шесть приводных кинематических пар.
8. Пространственный манипулятор относительного манипулирования по п. 1, отличающийся тем, что спаренные подвижные платформы выполнены в виде сочетания двух треугольных звеньев, соединенных между собой через сферический шарнир с тремя степенями свободы, одна из спаренных подвижных платформ кинематически связана с опорным основанием через три двухшарнирных соединительных рычага, выполненных с одинаковым расстоянием между параллельными осями расположенных на концах каждого из упомянутых рычагов цилиндрических шарниров, а другая спаренная подвижная платформа взаимосвязана с опорным основанием через две подвижные стержневые опоры, каждая из которых составлен из двух двухшарнирных соединительных рычагов для образования пространственного манипулятора с тремя степенями свободы, содержащего три приводные кинематические пары.
9. Пространственный манипулятор относительного манипулирования по п. 1, отличающийся тем, что взаимосвязь одной из спаренных подвижных платформ с опорным основанием выполнена в виде пространственного трехопорного шарнирного параллелограмма, содержащего три подвижные стержневые опоры, выполненные в виде трех двухшарнирных соединительных рычагов одинаковой длины, равной расстоянию между параллельными осями отверстий цилиндрических шарниров на концах каждого из упомянутых рычагов, один из которых снабжен приводной вращательной кинематической парой.
10. Пространственный манипулятор относительного манипулирования по п. 1, отличающийся тем, что взаимосвязь одной из спаренных подвижных платформ с опорным основанием выполнена в виде пространственного трехопорного шарнирного антипараллелограмма, содержащего три подвижные стержневые опоры, выполненные в виде трех двухшарнирных соединительных рычагов одинаковой длины, из которых два рычага установлены параллельно и соосно между собой, а третий рычаг установлен со скрещиванием с двумя упомянутыми рычагами и снабжен приводной вращательной кинематической парой.
| А.И.СМЕЛЯГИН, Структура машин, механизмов и конструкций, Учебное пособие, ИНФРА-М, Москва, 2019, стр.154, рис.2.74 | |||
| 0 |
|
SU202579A1 | |
| 0 |
|
SU160607A1 | |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| US 6729202 B2, 04.05.2004 | |||
| US 4628765 A1, 16.12.1986 | |||
| СФЕРИЧЕСКИЙ V-МАНИПУЛЯТОР | 2020 |
|
RU2730345C1 |

