Область техники, к которой относится изобретение
Настоящее изобретение относится к схеме подавления дрожания и к способу подавления дрожания.
Уровень техники
В цифровых сетях передачи данных используют способ заполнения импульсами для мультиплексирования асинхронных сигналов. В способе заполнения импульсами на стороне приема требуется выполнять обработку устранения заполнения импульсами. Поскольку сигнал, для которого была выполнена обработка устранения заполнения импульсами, имеет большую величину дрожания, это дрожание необходимо подавлять.
Обычно в качестве средства подавления дрожания, возникающего при устранении заполнения импульсами, как описано в патентном документе 1, до настоящего времени применяют способ, в котором используется запоминающее устройство и цифровая фазовая автоматическая подстройка частоты (DPLL). В этом способе дрожание, включенное во входной тактовый сигнал и во входные данные, может быть подавлено путем однократной записи входных данных в запоминающее устройство, считывания данных из запоминающего устройства, используя выходной тактовый сигнал с меньшей степенью дрожания, и с последующим их выводом. Синхронизация частоты поддерживается между входным тактовым сигналом и выходным тактовым сигналом с помощью DPLL, таким образом, что не возникает разрывность данных из-за переполнения или потери значимых разрядов в запоминающем устройстве.
Обычно при фазовой автоматической подстройке частоты (PLL) для сокращения времени вхождения в синхронизм необходимо расширять ширину полосы контура PLL. С одной стороны для подавления компонента дрожания входного сигнала ширину полосы контура PLL необходимо сужать таким образом, чтобы выходной тактовый сигнал не отслеживал дрожание входного тактового сигнала. Ширина полосы контура PLL определяется, в основном, шириной полосы фильтра контура.
В соответствии с этим в обычной схеме подавления дрожания для достижения высокого эффекта подавления дрожания ширину полосы контурного фильтра необходимо сужать, и в результате возникает проблема длительного время вхождения в синхронизм.
Также в PLL, как описано в патентном документе 2, с целью сокращения времени вхождения в синхронизм и улучшения стабильности во время синхронизации, предложено средство для определения, является ли разность фаз между входным сигналом и выходным сигналом меньшей, чем заданное значение, или нет, и изменения параметра контурного фильтра в соответствии с результатом определения.
Поскольку PLL обычно используют для того, чтобы сделать выходной сигнал синхронизированным по фазе с входным сигналом, ошибка фазы между входным сигналом и выходным сигналом будет мала, когда они находятся в синхронном состоянии. В соответствии с этим средство для выполнения изменений параметров в соответствии с тем, является ли ошибка фазы не меньшей, чем заданное значение, эффективно при сокращении времени вхождения в синхронизм и улучшении стабильности во время синхронизации.
Дополнительно приведены ссылки на патентные документы 3-7 в качестве документов предшествующего уровня техники.
[Патентный документ 1] выложенная заявка № 1992-246939 на японский патент.
[Патентный документ 2] выложенная заявка № 1997-200049 на японский патент.
[Патентный документ 3] выложенная заявка № 2000-031953 на японский патент.
[Патентный документ 4] выложенная заявка № 2003-023353 на японский патент.
[Патентный документ 5] выложенная заявка № 2007-036366 на японский патент.
[Патентный документ 6] выложенная заявка № 1993-327782 на японский патент.
[Патентный документ 7] выложенная заявка № 1994-053821 на японский патент.
Сущность изобретения
Задача, решаемая изобретением
Однако при PLL в схеме подавления дрожания входной тактовый сигнал имеет значительный компонент дрожания, и, таким образом, необходимо, чтобы выходной тактовый сигнал не отслеживал этот компонент дрожания. В соответствии с этим даже в синхронном состоянии возникает случай, когда разность фаз между входным тактовым сигналом и выходным тактовым сигналом принимает большие значения на определенный момент. Таким образом, когда описанный выше способ применяется в том виде, как он есть, в результате неправильного определения, что система находится в асинхронном состоянии, когда она в действительности находится в синхронном состоянии, возникает ненужное изменение параметра, и характеристики подавления дрожания ухудшаются. Поэтому существует проблема, состоящая в том, что трудно одновременно удовлетворить требование сокращения времени вхождения в синхронизм и характеристики высокой степени подавления дрожания.
В соответствии с этим цель настоящего изобретения состоит в том, чтобы обеспечить схему подавления дрожания и способ подавления дрожания, которые удовлетворяют как сокращению времени вхождения в синхронизм, так и характеристике высокой степени подавления дрожания.
Средство для решения задачи
Первая схема в соответствии с настоящим изобретением представляет собой схему подавления дрожания с использованием контура цифровой фазовой автоматической подстройки частоты, характеризующуюся тем, что сокращение времени вхождения в синхронизм и подавление дрожания достигаются путем определения, находится ли контур PLL в синхронном состоянии, по разности фаз, между входным тактовым сигналом частотой и выходным тактовым сигналом с последующим изменением характеристик контурного фильтра в соответствии с результатом определения.
Вторая схема в соответствии с настоящим изобретением характеризуется тем, что она дополнительно содержит секцию передачи тактового сигнала, с помощью которой выполняется восстановление синхронизации входных данных; и контур цифровой фазовой автоподстройки частоты, который подавляет дрожание выходных данных секции передачи тактового сигнала и выходного тактового сигнала путем изменения характеристик контурного фильтра в соответствии с результатом определения, находится ли контур в синхронном состоянии или нет.
Третья схема в соответствии с настоящим изобретением характеризуется тем, что секция передачи тактовой частоты дополнительно содержит схему последовательно/параллельного преобразования, которая выполняет последовательно-параллельное преобразование входных данных; триггерную схему, которая изменяет синхронизацию параллельных данных из схемы последовательно/параллельного преобразования; и схему параллельно/последовательного преобразования, которая выполняет параллельно-последовательное преобразование данных из триггерной схемы, контур цифровой фазовой автоподстройки частоты содержит компаратор фазы, который сравнивает разность фаз между входным тактовым сигналом секции передачи тактового сигнала и выходного тактового сигнала; генератор с численным управлением, который подает тактовый сигнал в триггерную схему и схему параллельно/последовательного преобразования; контурный фильтр, установленный между компаратором фазы и генератором с численным управлением; и схему выбора параметра, которая выбирает и изменяет параметр контурного фильтра в соответствии с выходом компаратора фазы.
Четвертая схема в соответствии с настоящим изобретением отличается тем, что компаратор фазы дополнительно содержит схему детектирования переднего фронта на стороне входа, которая детектирует передний фронт сигнала сравнения фазы на стороне входа, который генерируется путем деления входного тактового сигнала; схему детектирования переднего фронта на стороне выхода, которая детектирует передний фронт сигнала сравнения фазы на стороне выхода, путем деления выходного сигнала; счетчик, который определяет разность фаз путем подсчета периода от переднего фронта сигнала сравнения фазы на стороне входа до переднего фронта сигнала сравнения фазы на стороне выхода посредством тактового сигнала выборки.
Первый способ в соответствии с настоящим изобретением представляет собой способ подавления дрожания с использованием контура цифровой фазовой автоподстройки частоты, характеризующийся тем, что сокращение времени вхождения в синхронизм и подавление дрожания достигается путем определения, находится ли контур обратной связи в синхронном состоянии или нет, по разности фаз между входным тактовым сигналом и выходным тактовым сигналом, и путем изменения характеристик контурного фильтра в соответствии с результатом определения.
Второй способ в соответствии с настоящим изобретением характеризуется тем, что дополнительно дрожание выходных данных секции передачи тактового сигнала и выходного тактового сигнала подавляется путем выполнения восстановления синхронизации входных данных с помощью секции передачи тактового сигнала и путем изменения характеристик контурного фильтра в соответствии с результатом определения, находится ли контур цифровой фазовой автоподстройки частоты в синхронном состоянии или нет.
Технический результат изобретения
В соответствии с настоящим изобретением в схеме подавления дрожания с использованием контура цифровой фазовой автоподстройки частоты одновременно может быть удовлетворено требование сокращения времени вхождения в синхронизм и эффекта значительного подавления дрожания путем определения, находится ли контур PLL в синхронном состоянии или нет, используя разность фаз между входным тактовым сигналом и выходным тактовым сигналом, и последующим изменением характеристик контурного фильтра в соответствии с результатом определения.
Подробное описание изобретения
Вариант выполнения схемы подавления дрожания в соответствии с настоящим изобретением представляет собой схему подавления дрожания фазы, использующую цифровую фазовую автоподстройку частоты, отличающуюся тем, что сокращение времени вхождения в синхронизм и подавление дрожания достигается путем определения, находится ли контур в синхронном состоянии, по разности фаз между входным тактовым сигналом и выходным тактовым сигналом, и изменения характеристики контурного фильтра в соответствии с результатом определения.
В соответствии с упомянутым выше выполнением одновременное сокращение времени вхождения в синхронизм и подавление дрожания удовлетворяется путем определения, находится ли контур в синхронном состоянии, используя разность фаз, между входным тактовым сигналом и выходным тактовым сигналом, и изменения характеристик контурного фильтра в соответствии с результатом определения. Поскольку дорогостоящий управляемый напряжением генератор и другие аналоговые компоненты не требуются, и легко может быть достигнута интеграция, можно уменьшить стоимость. Кроме того, при использовании DPLL становится возможным реализовать постоянные характеристики подавления дрожания, без влияния изменений старения и изменения температуры.
Другой вариант выполнения схемы подавления дрожания в соответствии с настоящим изобретением характеризуется тем, что он содержит секцию передачи тактового сигнала, с помощью которой выполняется восстановление синхронизации входных данных; и контур цифровой фазовой автоподстройки частоты, который подавляет дрожание выходных данных секции передачи тактовой частоты и выходного тактового сигнала путем изменения характеристик контурного фильтра в соответствии с результатом определения, находится ли контур в синхронном состоянии или нет.
В соответствии с описанным выше составом как сокращение времени входа в синхронизм, так и подавление дрожания удовлетворяются путем определения, находится ли контур в синхронном состоянии, используя разность фаз, между входным тактовым сигналом и выходным тактовым сигналом, и путем изменения характеристик контурного фильтра в соответствии с результатом определения. Поскольку дорогостоящий управляемый напряжением генератор и другие аналоговые компоненты не требуются, и, таким образом, можно легко достичь интеграции, можно снизить стоимость. Кроме того, путем использования DPLL возможно реализовать постоянные характеристики подавления дрожания, без влияния изменений в результате старения и изменения температуры.
Еще один вариант выполнения схемы подавления дрожания в соответствии с настоящим изобретением характеризуется тем, что секция передачи тактового сигнала дополнительно содержит схему последовательно/параллельного преобразования, которая выполняет последовательно-параллельное преобразование входных данных; триггерную цепь, которая изменяет синхронизацию параллельных данных из схемы последовательно/параллельного преобразования; и схему параллельно/последовательного преобразования, которая выполняет параллельно-последовательное преобразование данных, поступающих из триггерной схемы, и контур цифровой фазовой автоподстройки частоты содержит компаратор фазы, который сравнивает разность фаз между входным тактовым сигналом секции передачи тактового сигнала и выходным тактовым сигналом; генератор с численным управлением, который подает тактовый сигнал в триггерную схему параллельно/последовательного преобразования; контурный фильтр, вставленный между компаратором фазы и генератором с численным управлением; и схему выбора параметра, которая выбирает и изменяет параметр контурного фильтра в соответствии с выходом компаратора фазы.
В соответствии с описанным выше выполнением как сокращение времени входа в синхронизм, так и подавление дрожания реализуется путем определения, находится ли контур в синхронном состоянии, используя разность фаз между входным тактовым сигналом и выходным тактовым сигналом и изменяя характеристики контурного фильтра в соответствии с результатом определения. Поскольку дорогостоящий управляемый напряжением генератор и другие аналоговые компоненты не требуются, и, таким образом, может быть легко достигнута интеграция, можно уменьшить стоимость. Кроме того, благодаря использованию DPLL становится возможным реализовать постоянные характеристики подавления дрожания без влияния изменений старения и изменения температуры.
Другой вариант выполнения схемы подавления дрожания фазы в соответствии с настоящим изобретением характеризуется тем, что компаратор фазы дополнительно содержит схему детектирования переднего фронта на стороне входа, которая детектирует передний фронт сигнала сравнения фазы на стороне входа, который генерируется путем делении входного тактового сигнала; схему детектирования переднего фронта на стороне выхода, которая детектирует передний фронт сигнала сравнения фазы на стороне выхода, который генерируется путем деления выходного сигнала; счетчик, который детектирует разность фаз путем определения периода от переднего фронта сигнала сравнения фаз на стороне входа до переднего фронта сигнала сравнения фаз на стороне выхода посредством тактового сигнала выборки.
В соответствии с описанным выше выполнением одновременно удовлетворяются требования сокращения времени входа в синхронизм и подавления дрожания путем определения, находится ли контур в синхронном состоянии, используя разность фаз между входным тактовым сигналом и выходным тактовым сигналом, и путем изменения характеристик контурного фильтра в соответствии с результатом определения. Поскольку дорогостоящий управляемый напряжением генератор и другие аналоговые компоненты не требуются, и, таким образом, может быть легко достигнута интеграция, может быть уменьшена стоимость. Кроме того, путем использования DPLL, становится возможным реализовать постоянные характеристики подавления дрожания без влияния изменений в результате старения и изменений температуры.
Вариант выполнения способа подавления дрожания фазы в соответствии с настоящим изобретением представляет собой способ подавления дрожания фазы, в котором используется контур цифровой фазовой автоподстройки частоты, характеризующийся тем, что сокращение времени входа в синхронизм и подавление дрожания достигается путем определения, находится ли контур в синхронном состоянии, по разности фаз между входным тактовым сигналом и выходным тактовым сигналом, и путем изменения характеристик контурного фильтра в соответствии с результатом определения.
В соответствии с описанным выше выполнением как сокращение времени входа в синхронизм, так и подавление дрожания удовлетворяется путем определения, находится ли контур в синхронном состоянии, с использованием разности фаз между входным тактовым сигналом и выходным тактовым сигналом, и путем изменения характеристик контурного фильтра в соответствии с результатом определения. Поскольку дорогостоящий управляемый напряжением генератор и другие аналоговые компоненты не требуются, и, таким образом, может быть легко достигнута интеграция, может быть уменьшена стоимость. Кроме того, путем использования DPLL, становится возможным реализовать постоянные характеристики подавления дрожания, без влияния изменений в результате старения и изменений температуры.
Другой вариант выполнения способа подавления дрожания в соответствии с настоящим изобретением характеризуется тем, что дополнительно выполняют восстановление синхронизации для входных данных с помощью секции передачи тактового сигнала и подавляют дрожание выходных данных секции передачи тактового сигнала и выходного тактового сигнала путем изменении в контуре цифровой фазовой автоподстройки частоты характеристик контурного фильтра в соответствии с результатом определения, находится ли контур в синхронном состоянии.
Кроме того, упомянутые выше варианты выполнения представляют пример предпочтительных вариантов воплощения настоящего изобретения, и различные виды модифицированной реализации возможны в пределах диапазона, который не отклоняется от сущности настоящего изобретения, без ограничения указанным.
Настоящее изобретение ниже подробно описано на примере.
Пример 1
Структура примера
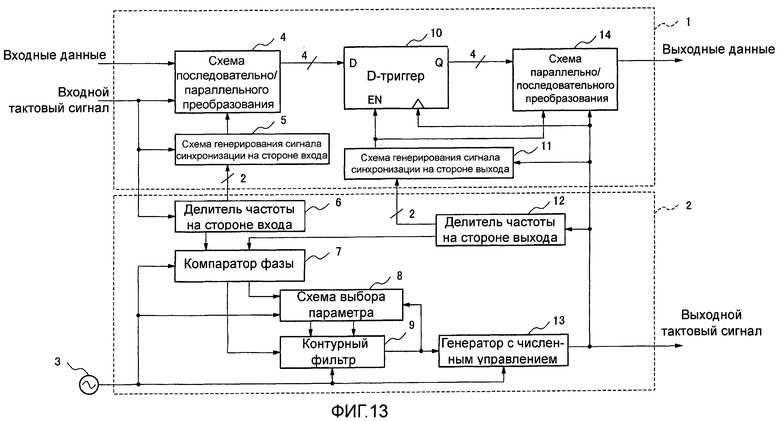
На фиг. 1 показана блок-схема, которая представляет пример схемы подавления дрожания в соответствии с настоящим изобретением.
Схема подавления дрожания, показанная на фиг. 1, включает в себя секцию 1 передачи тактового сигнала и контур 2 цифровой фазовой автоподстройки частоты (DPLL), когда они, в общем, разделены.
Секция 1 передачи тактового сигнала включает в себя схему 4 последовательно/параллельного преобразования, схему 5 генерирования сигнала синхронизации на стороне входа, схему 11 генерирования сигнала синхронизации на стороне выхода, D-триггер 10 и схему 14 параллельно/последовательного преобразования. DPLL 2 включает в себя делитель 6 частоты на стороне входа, делитель 12 частоты на стороне выхода, компаратор 7 фазы, схему 8 выбора параметра, контурный фильтр 9 и генератор 13 с численным управлением. Каждый компонент секции 1 передачи тактового сигнала и DPLL 2 описан ниже.
Прежде всего "передача тактового сигнала" означает "изменение рабочего тактового сигнала триггера, который выполняет восстановление синхронизации данных". На фиг. 1, несмотря на схему 4 последовательно/параллельного преобразования, хотя внутренний D-триггер 10 управляется входным тактовым сигналом в самом D-триггере 10, он управляется выходным тактовым сигналом. В соответствии с этим для D-триггера 10 это означает, что рабочий тактовый сигнал переносится из входного тактового сигнала на выходной тактовый сигнал. Хотя выходные данные D-триггера 10 выводятся из схемы 14 параллельно/последовательного преобразования на выход, в итоге, триггеры в схеме параллельно/последовательного преобразования 14 также работают с использованием выходного тактового сигнала.
Схема 4 последовательно/параллельного преобразования преобразует входные данные в параллельные данные на основе сигнала синхронизации, вводимого из схемы 5 генерирования сигнала синхронизации на стороне входа.
Делитель 6 частоты на стороне входа делит входной тактовый сигнал и выводит сигнал со своего выхода в схему 5 генерирования сигнала синхронизации на стороне входа и в компаратор 7 фазы.
В схеме 5 генерирования сигнала синхронизации на стороне входа генерируется сигнал синхронизации, предназначенный для выполнения последовательно-параллельного преобразования, на основе разделенного тактового сигнала, выводимого из делителя 6 частоты на стороне входа, и затем подается на схему 4 последовательно/параллельного преобразования.
Компаратор 7 фазы определяет ошибку фазы между сигналом сравнения фазы на стороне входа и сигналом сравнения фазы на стороне выхода и выводит информацию об ошибке фазы в схему 8 выбора параметра и в контурный фильтр 9.
Схема 8 выбора параметра получает абсолютную величину введенной информации ошибки фазы и сравнивает ее с пороговым значением ошибки фазы, установленным заранее. Если результат сравнения остается не меньше, чем пороговое значение ошибки фазы в течение заданной величины подсчета этапа прямой защиты, то определяется, что контур находится в асинхронном состоянии, и параметры α 1 и β 1, соответствующие широкой ширине полосы, выводятся в контурный фильтр 9.
В данном описании термин "в течение заданной величины подсчета этапа прямой защиты" соответствует счетчику 83 и компаратору 85 по фиг. 4. Хотя "прямая защита" представляет собой операцию защиты при определении перехода от синхронного состояния в асинхронное состояние, ее описание здесь не приведено, поскольку сама операция аналогична обратной защите.
Аналогично, когда результат сравнения продолжает оставаться меньшим, чем пороговое значение ошибки фазы, для момента времени подсчета "этапа обратной защиты" выводят параметры α 2 и β 2, соответствующие узкой ширине полосы.
Контурный фильтр 9 усредняет информацию об ошибке фазы, используя коэффициенты α и β, подаваемые из схемы 8 выбора параметра, и выводят значение управления фазой. Генератор 13 с численным управлением управляет фазой выходного тактового сигнала, в соответствии со значением управления фазой, подаваемым из контурного фильтра 9. Делитель 12 частоты на стороне выхода делит выходной тактовый сигнал и выводит разделенный тактовый сигнал в схему 11 генерирования сигнала синхронизации на стороне выхода и в компаратор 7 фазы.
В схеме 11 генерирования сигнала синхронизации на стороне выхода генерируется сигнал синхронизации, подаваемый на выход схемы 4 последовательно/параллельного преобразования через D-триггер 10. В схеме 14 параллельно/последовательного преобразования параллельные данные с выхода D-триггера 10 преобразуются обратно в последовательные данные и затем выводятся.
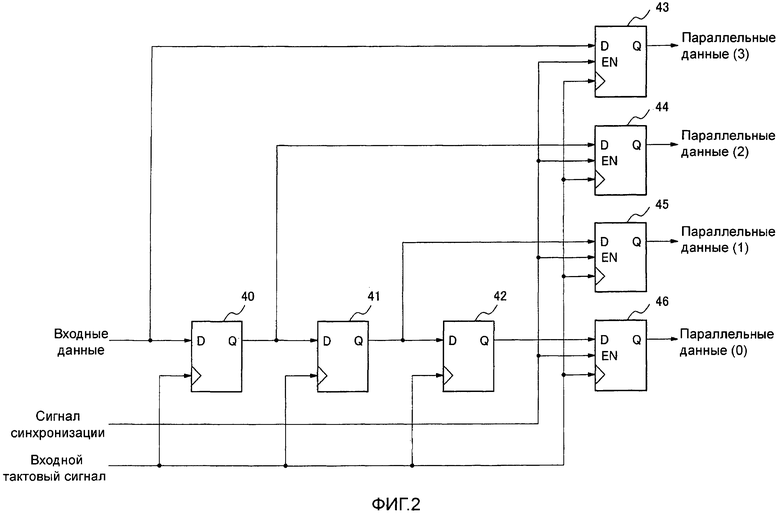
На фиг. 2 показана блок-схема, представляющая пример схемы 4 последовательно/параллельного преобразования, которая используется для схемы подавления дрожания, показанной на фиг. 1.
Как показано на фиг. 2, схема 4 последовательно/ параллельного преобразования реализована в результате комбинации сдвигового регистра, в котором последовательно соединены D-триггеры 40-42, и D-триггеров 43-46 с отпирающим выводом, фиксирующим выход регистра на основе сигнала синхронизации. Соотношение последовательно/параллельного преобразования определяется величиной дрожания входного тактового сигнала и требуемой величиной подавления. Когда дрожание входного тактового сигнала велико, для сохранения достаточного запаса синхронизации, соотношение преобразования должно быть большим. На фиг. 2 показан пример, в котором каждые 4 бита входных данных преобразуют в 4 бита параллельных данных.
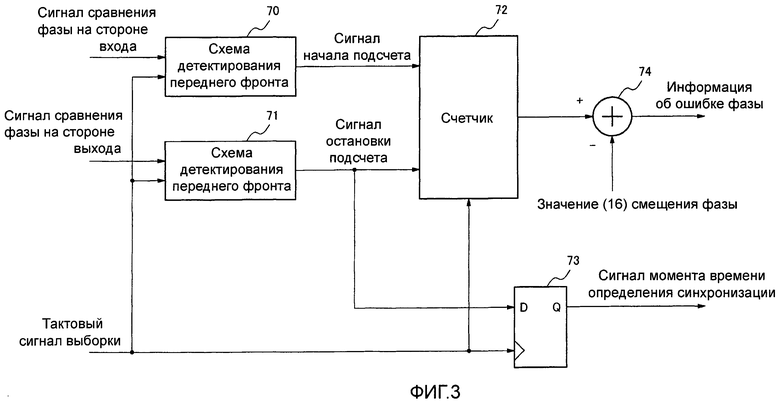
На фиг. 3 показана блок-схема, представляющая пример компаратора 7 фазы, который используется для схемы подавления дрожания, показанной на фиг. 1.
На фиг. 3 схема 70 детектирования переднего фронта и схема 71 детектирования переднего фронта детектируют передний фронт сигнала сравнения фазы на стороне входа и сигнала сравнения фазы на стороне выхода соответственно, для генерирования импульса, и затем выводят их в счетчик 72. В счетчике 72 импульсы, выводимые из схемы 70 детектирования переднего фронта и схемы 71 детектирования переднего фронта, используются как сигнал начала подсчета и сигнал остановки подсчета соответственно. Сигнал остановки подсчета выводится в схему 8 выбора параметра как сигнал момента времени определения синхронизации после выполнения восстановления синхронизации D-триггером 73. Счетчик 72 выполняет подсчет, используя тактовую частоту выборки после ввода сигнала начала подсчета, пока не буден введен сигнал остановки подсчета, и выводит значение счета в момент времени, когда вводится сигнал остановки подсчета.
Тактовый сигнал выборки представляет собой тактовый сигнал, который выводится из генератора 3 и который имеет значительно более высокую частоту, чем входной/выходной тактовый сигнал. Сумматор 74 вычитает значение смещения фазы, установленное заранее, из выхода счетчика 72 и выводит результат в схему 8 выбора параметра и в контурный фильтр 9, как информацию об ошибке фазы. Значение смещения фазы представляет собой значение, определяющее разность фаз между входной стороной и выходной стороной, когда контур PLL находится в синхронном состоянии. Обычно значение смещения фазы устанавливается так, чтобы только центр данных мог быть взят, когда данные, преобразованные в параллельные данные, переносятся на выходной тактовый сигнал. В результате обеспечивается максимальный запас по дрожанию входного тактового сигнала.
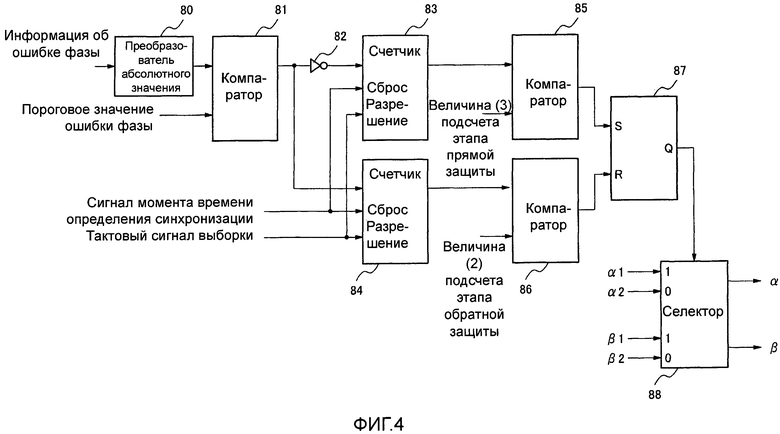
На фиг. 4 показана блок-схема, представляющая пример схемы 8 выбора параметра, которая используется для схемы подавления дрожания, представленной на фиг. 1.
На фиг. 4 преобразователь 80 абсолютного значения преобразует информацию об ошибке фазы, вводимую в компаратор 7 фазы, в абсолютное значение.
Компаратор 81 сравнивает абсолютное значение ошибки фазы и пороговое значение ошибки фазы (2 на фиг. 4), установленное заранее, и выводит результат сравнения в счетчик 83, через логический элемент 82 инверсии и в счетчик 84.
В счетчике 83 выполняется подсчет с использованием тактового сигнала выборки, на основе временного сигнала определения синхронизации, вводимого из компаратора 7 фазы. Когда выход логического элемента 82 инверсии равен "1", выполняют сброс значения подсчета.
Компаратор 85 сравнивает величину подсчета счетчика 83 и заданную величину подсчета этапа прямой защиты (3 на фиг. 4) и выводит результат на вывод установки триггера 87 установки/сброса (S/R триггер). Аналогично счетчик 84 выполняет подсчет, используя тактовую частоту выборки, на основе временного сигнала определения синхронизации.
Когда выход компаратора 81 равен "1", выполняется сброс величины подсчета. В компараторе 86 сравнивается величина подсчета и заданная величина подсчета этапа обратной защиты (2 на фиг. 4), и результат сравнения подается на вывод сброса S/R триггера 87. В S/R триггере 87 сигнал выбора параметра генерируется в соответствии с выходом компаратора 85 и компаратора 86 и выводится в селектор 88.
В селекторе 88 любой из коэффициентов α 1 и β 1, соответствующих широкой ширине полосы, или коэффициентов α 2 и β 2, соответствующих узкой ширине полосы, выбирается на основе сигнала выбора параметра, подаваемого из S/R триггера 87, и выводится в контурный фильтр 9.
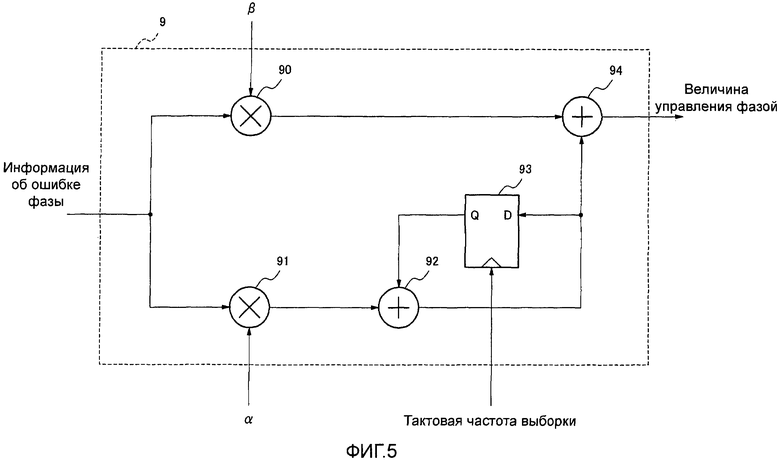
На фиг. 5 показана блок-схема, представляющая пример контурного фильтра 9, который используется для схемы подавления дрожания, показанной на фиг. 1.
На фиг. 5 информация об ошибке фазы умножается с помощью умножителя 90 и умножителя 91 на коэффициенты α и β, подаваемые из схемы выбора 8 параметра, соответственно. Сумматор 92 суммирует выход D-триггера 93 и результат умножения информации об ошибке фазы и коэффициента α. D-триггер 93 выполняет суммирование с накоплением выхода умножителя 91 путем удержания выхода сумматора 92. Сумматор 94 суммирует выход умножителя 90 и выход сумматора 92 и выводит результат в генератор 13 с численным управлением как значение управления фазой.
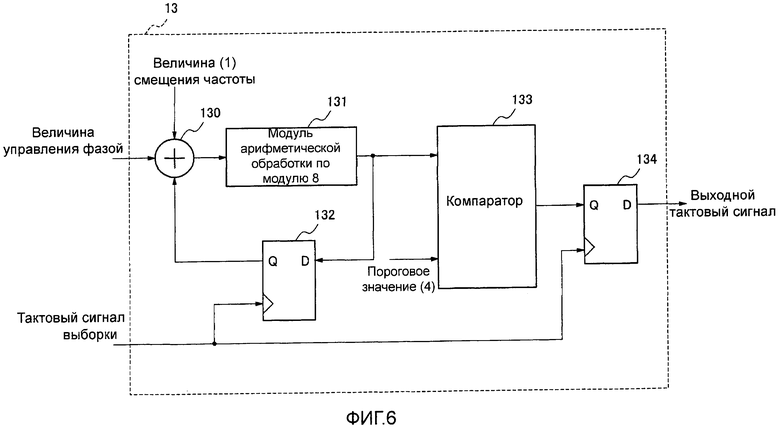
На фиг. 6 показана блок-схема, представляющая пример генератора 13 с численным управлением, который используется для схемы подавления дрожания, показанной на фиг. 1.
На фиг. 6 сумматор 130 суммирует вводимое значение управления фазой, значение смещения частоты, установленное заранее, и выход D-триггера 132 и выводит результат в модуль 131 арифметической обработки по модулю 8. В модуле 131 арифметической обработки по модулю 8, когда значение, подаваемое из сумматора 130, не меньше чем 8, выводится остаток вычитания 8 из входного значения. Компаратор 133 выполняет сравнение выходного значения модуля 131 арифметической обработки по модулю 8 и заранее установленного порогового значения и выводит "0", когда оно меньше чем пороговое значение, и выводит "1", когда оно не меньше чем пороговое значение. D-триггер 134 выполняет восстановление синхронизации выходного сигнала компаратора 133 и передает его в D-триггер 10, схему 14 параллельно/последовательного преобразования, схему 11 генерирования сигнала синхронизации на стороне выхода и делитель 12 частоты на стороне выхода в качестве рабочего тактового сигнала. Также он подается на выход как выходной тактовый сигнал.
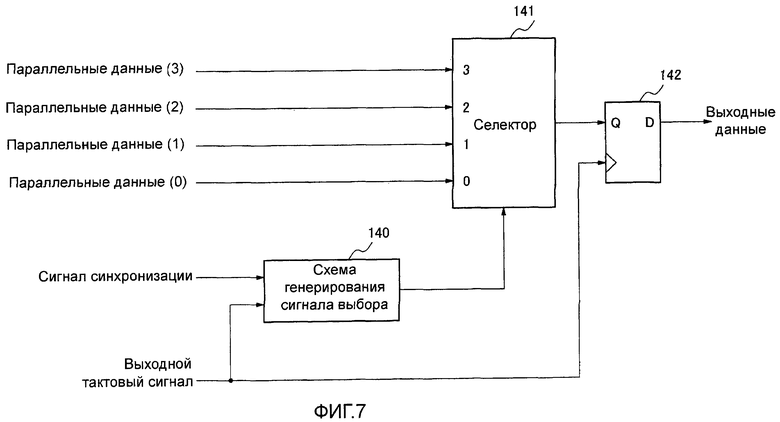
На фиг. 7 показана блок-схема, представляющая пример схемы 14 параллельно/последовательного преобразования, которая используется в качестве схемы подавления дрожания, показанной на фиг. 1.
На фиг. 7 схема генерирования сигнала выбора 140 генерирует сигнал выбора на основе сигнала синхронизации, вводимого из схемы 11 генерирования сигнала синхронизации на стороне выхода. Селектор 141 выбирает данные, предназначенные для вывода, из четырех входных параллельных данных на основе сигнала выбора, вводимого из схемы 140 генерирования сигнала выбора, и выводит его в D-триггер 142. В D-триггере 142 выполняется восстановление синхронизации для данных, введенных из селектора 141, посредством выходного тактового сигнала, и они подаются на выход.
Описание работы примера
Работа примера в соответствии с настоящим изобретением будет описана со ссылкой на фиг. 1.
Входные данные поступают на вход при синхронизации с входным тактовым сигналом. При этом предполагается, что, хотя входная тактовая частота включает в себя компонент дрожания, в среднем, она имеет фиксированную частоту.
Секция 1 передачи тактового сигнала выполняет передачу на выход тактового сигнала, который имеет небольшой компонент дрожания, обеспечивая запас по синхронизации для поглощения дрожания путем увеличения длительности в результате преобразования входных данных в параллельные данные. После этого параллельные данные преобразуются обратно в исходные последовательные данные, и затем они выводятся. Подробное описание секции 1 передачи тактового сигнала приведено ниже со ссылкой на временную диаграмму, показанную на фиг. 8.
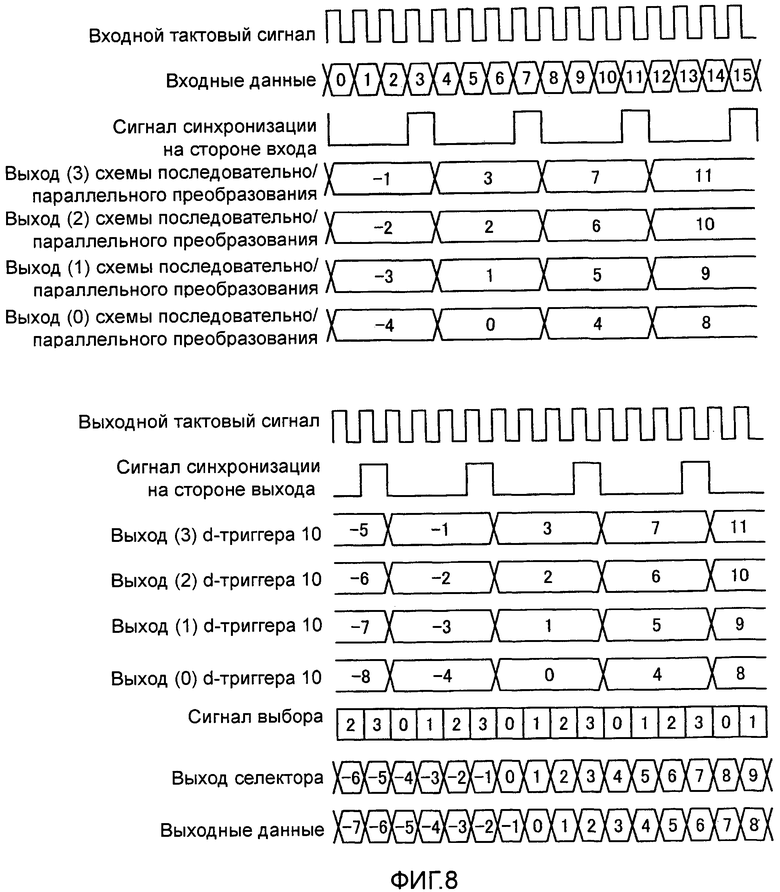
На фиг. 8 показан пример временной диаграммы схемы подавления дрожания, показанной на фиг. 1.
Входные данные вводятся в схему 4 последовательно/параллельного преобразования и последовательно сохраняются в сдвиговом регистре, который включает в себя D-триггеры 40-42. Когда сигнал, подаваемый из схемы 5 генерирования сигнала синхронизации на стороне входа, представляет собой "1", входные данные и каждый выход D-триггеров 40-42 подаются в D-триггеры 43-46 с разрешающим выводом в момент переднего фронта входного тактового сигнала и преобразуются в параллельные данные.
Когда сигнал синхронизации, вводимый из схемы 11 генерирования сигнала синхронизации на стороне выхода, присутствующий на стороне выхода, представляет собой "1", D-триггер 10 выполняет восстановление синхронизации параллельных данных, выводимых из схемы 4 последовательно/параллельного преобразования, в момент переднего фронта импульса выходного тактового сигнала, для преобразования его в выходной тактовый сигнал.
Параллельные данные, переносимые на выходной тактовый сигнал в D-триггере 10, преобразуются обратно в исходные последовательные данные в схеме 14 параллельно/последовательного преобразования.
Как показано на фиг. 8, схема 140 генерирования сигнала выбора представляет собой счетчик, который выполняет подсчет от 0 до 3 и, когда сигнал синхронизации на стороне выхода равен "1", инициализирует величину подсчета в 0 в момент переднего фронта импульса выходного тактового сигнала. В селекторе 141 входные данные, соответствующие выходному значению схемы 140 генерирования сигнала выбора, выбираются для вывода. Восстановление синхронизации выполняется на выходе селектора с помощью D-триггера 142, используя выходной тактовый сигнал, и выводится во внешнюю схему.
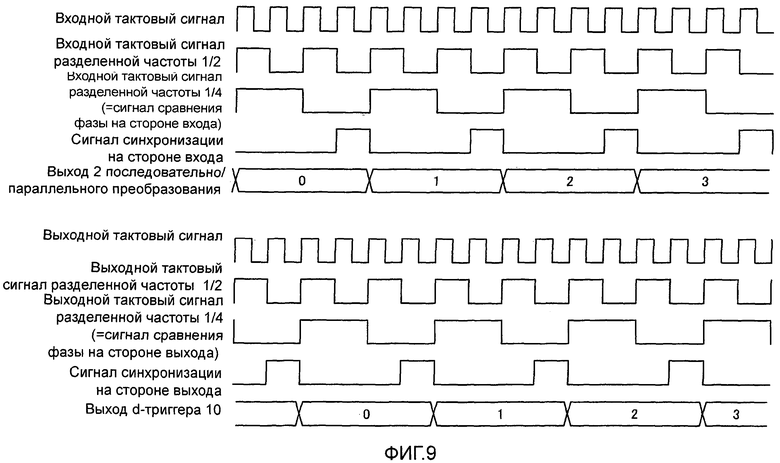
Пример временной диаграммы схемы 5 генерирования сигнала синхронизации на стороне входа и схемы 11 генерирования сигнала синхронизации на стороне выхода, которые используются для схемы подавления дрожания, показанной на фиг. 1, представлен на фиг. 9.
В схеме 5 генерирования сигнала синхронизации на стороне входа и в схеме 11 генерирования сигнала синхронизации на стороне выхода, когда тактовый сигнал разделенной частоты 1/2 принимает значение "1" и одновременно тактовый сигнал разделенной частоты 1/4 имеет значение "0", выход устанавливается в "1" в момент переднего фронта тактового сигнала. Кроме того, делитель 6 частоты на стороне входа и делитель 11 частоты на стороне выхода выводят тактовый сигнал разделенной частоты 1/4 в компаратор 7 фазы, как сигналы сравнения фазы для стороны входа и стороны выхода соответственно. В состоянии синхронизации DPLL 2 управляет фазой выходного тактового сигнала таким образом, чтобы разность фаз между сигналами сравнения фазы на стороне входа и стороне выхода становилась равной 180 градусов. В соответствии с этим разность фаз между сигналами синхронизации на стороне входа и на стороне выхода также становится равной 180 градусов, и, таким образом, в D-триггере 10, запас по синхронизации при передачи тактового сигнала может быть максимальным.
Далее описана операция DPLL 2.
В DPLL 2 входной тактовый сигнал и выходной тактовый сигнал делятся соответственно для генерирования сигнала сравнения фазы, и выполняется сравнение их фаз. Затем результат сравнения фазы усредняется, и генерируется значение управления фазой, и фаза выходного тактового сигнала управляется с использованием значения управления фазой таким образом, чтобы разность фаз между сигналами сравнения фазы входной и выходной сторон становилась 180 градусов. В результате получают структуру, в которой в секции 1 переноса тактового сигнала тактовый сигнал переносится определенно в пределах запаса синхронизации. Подробное описание операции DPLL 2 будет приведено ниже со ссылкой на чертежи.
Тактовые сигналы разделенной частоты 1/4, генерируемые делителем 6 частоты на стороне входа и делителем 12 частоты на стороне выхода, вводят в компаратор 7 фазы как сигнал сравнения фазы на стороне входа и на стороне выхода. В компараторе 7 фазы детектируют ошибку фазы между ними и затем подают в схему 8 выбора параметра и в контурный фильтр 9 как информацию об ошибке фазы.
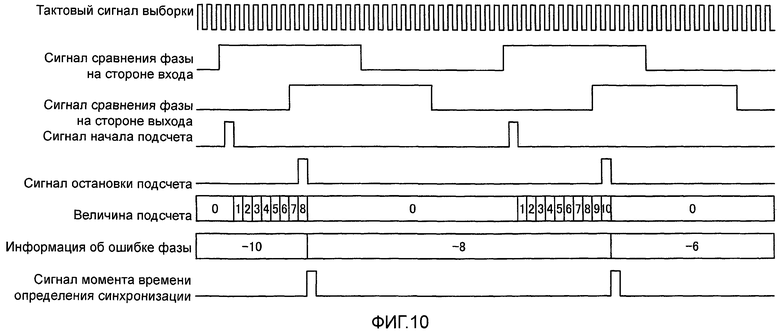
Пример схемы синхронизации компаратора 7 фазы, который используют для схемы подавления дрожания, показанной на фиг. 1, представлен на фиг. 10.
В схеме 70 детектирования переднего фронта и в схеме 71 детектирования переднего фронта передний фронт детектируют с помощью выборки сигналов сравнения фазы на стороне входа и на стороне выхода, используя тактовый сигнал выборки, подаваемый из генератора 3. Когда детектируют фронт, генерируют импульс "1" и выводят в счетчик 52. В счетчике 52, когда импульс подается из схемы 50 детектирования переднего фронта, начинают подсчет, а когда импульс подается из схемы 51 детектирования переднего фронта, подсчет останавливают и выполняют сброс величины подсчета в 0. Выводят величину подсчета в момент ввода импульса.
В сумматоре 53 величину подсчета и значение фазы смещения суммируют и результат выводят в схему 8 выбора параметра и в контурный фильтр 9 как конечную информацию об ошибке фазы. Значение смещения фазы представляет собой значение, обозначающее разность фаз между входной стороной и выходной стороной, когда контур находится в синхронном состоянии. В DPLL 2, поскольку ошибкой фазы управляют, чтобы свести ее к нулю, разность фаз в синхронном состоянии может быть установлена путем изменения величины смещения фазы.
В случае, показанном на фиг. 3, цикл сигнала сравнения фазы составляет 32 импульса тактового сигнала выборки. В соответствии с этим, когда значение смещения фазы установлено равным 16, может быть достигнута синхронизация в момент времени, когда разность фаз между входной стороной и выходной стороной составляет 180 градусов (половина цикла). Кроме того, D-триггер 73 выполняет восстановление синхронизации сигнала остановки подсчета и выводит его в схему 8 выбора параметра как сигнал синхронизации для определения синхронизации.
Как показано на фиг. 10, сигнал синхронизации определения синхронизации будет равен "1" в заголовке информации об ошибке фазы. В результате, в схеме 8 выбора параметра время до использования информации об ошибке фазы для определения синхронизации сделано минимальным.
В схеме 8 выбора параметра определение синхронизации контура выполняется по введенной информации об ошибке фазы, и параметр, выводимый в контурный фильтр 9, изменяется в соответствии с этим результатом.
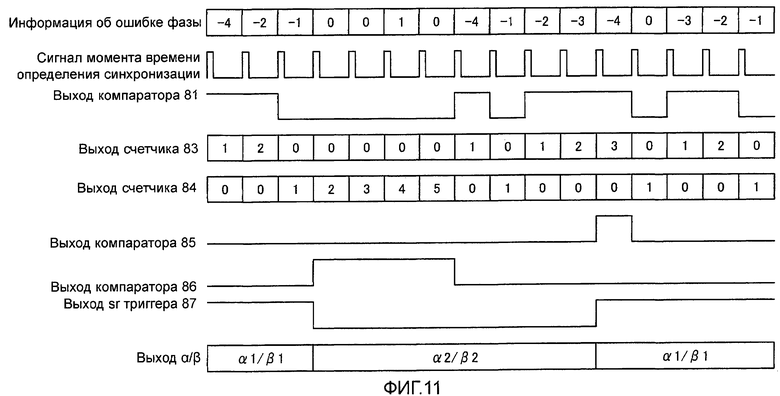
Пример временной диаграммы схемы 8 выбора параметра, используемой для схемы подавления дрожания, показанной на фиг. 1, представлен на фиг. 11.
Работа схемы 8 выбора параметра описана ниже со ссылкой на фиг. 4 и 11.
Преобразователь 80 абсолютной величины преобразует введенную информацию об ошибке фазы в абсолютное значение и выводит его в компаратор 81. Когда абсолютная величина ошибки фазы не меньше чем 2, компаратор 81 выводит "1", и когда она меньше чем 2, выводит "0". Когда сигнал синхронизации для определения синхронизации, вводимый из компаратора 7 фазы, равен "1", счетчик 83 выполняет подсчет в моменты поступления переднего фронта тактового сигнала выборки. В момент времени, когда выход логического элемента 82 инверсии равен "1", то есть информация об ошибке фазы меньше чем 2, выполняется сброс величины подсчета.
Когда выход счетчика 83 не меньше чем 3, компаратор 85 выводит "1", а когда он меньше чем 3, выводится "0". Аналогично, когда сигнал синхронизации для определения синхронизации равен "1", счетчик 84 выполняет подсчет вплоть до переднего фронта импульса тактового сигнала выборки. Кроме того, в отличие от счетчика 83, сброс величины подсчета выполняется, когда выход компаратора 81 равен "1", то есть информация об ошибке фазы не меньше чем 3.
Когда выход счетчика 84 не меньше чем 2, компаратор 86 выводит "1", а когда он меньше чем 2, выводится "0". Когда выход компаратора 85 равен "1", S/R триггер 87 выводит "1", и когда выход компаратора 86 равен "1", выводится "0". Когда выход S/R триггера 87 равен "1", селектор 88 выводит параметры α 1 и β 1, соответствующие широкой ширине полосы, в контурный фильтр 9. Кроме того, когда выход S/R триггера 87 равен "0", выводятся параметры α 2 и β 2, соответствующие узкой ширине полосы.
Как описано выше, в схеме 8 выбора параметра, когда информация об ошибке фазы не меньше, чем пороговое значение ошибки фазы для заданной непрерывной величины подсчета этапа прямой защиты, определяется, что контур находится в асинхронном состоянии, и для уменьшения времени вхождения в синхронизм выводятся параметры α 1 и β 1 для расширения ширины полосы контурного фильтра 9. И наоборот, когда информация об ошибке фазы меньше, чем пороговое значение ошибки, в течение непрерывной величины подсчета этапа обратной защиты, определяется, что контур находится в синхронном состоянии, и для улучшения характеристик подавления дрожания выводятся параметры α 2 и β 2 для сужения ширины полосы контурного фильтра 9.
Контурный фильтр 9 представляет собой цифровой фильтр низкой частоты, как показано на фиг. 5. Как выражено в формуле 1, его частотная характеристика определяется посредством α и β. Для расширения полосы в соответствии с формулой (1) значение α и β должны быть сделаны большими.
H(j ω)=β+α/(l-exp-jω)… (1)
Введенную информацию об ошибке фазы усредняют с помощью контурного фильтра 9 и выводят в генератор 13 с численным управлением, в конечном итоге, как значение управления фазой.
Работа генератора 13 с численным управлением будет описана со ссылкой на фиг. 6 и фиг. 12.
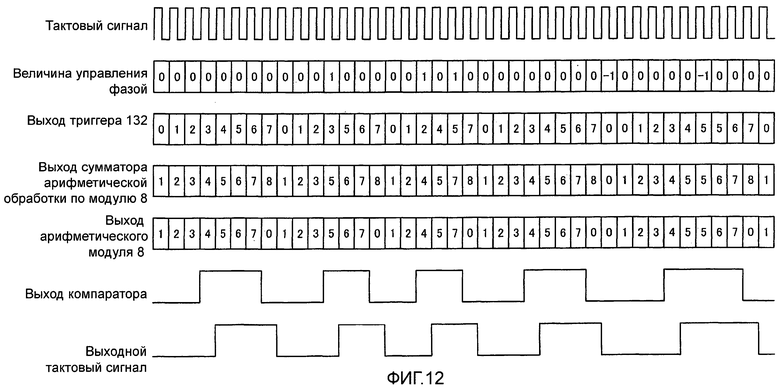
На фиг. 12 представлен пример временной диаграммы генератора 13 с численным управлением, показанного на фиг. 6.
Сумматор 130 суммирует значение управления фазой, вводимое из контурного фильтра 9, значение смещения частоты, установленное заранее, и выход D-триггера 132 и выводит результат в модуль 131 арифметической обработки по модулю 8. D-триггер 132 содержит выход модуля арифметической обработки по модулю 8 с опережением на один период тактового сигнала. В случае синхронного состояния, поскольку значение управления фазой приблизительно равно 0, выход сумматора 130 увеличивается на 1 (значение смещения частоты) за каждый один период тактового сигнала.
В модуле 131 арифметической обработки по модулю 8, когда выход сумматора увеличивается до 8 (установленное значение модуля арифметической обработки по модулю), остаток вычитания собственно 8 из выхода сумматора выводят в D-триггер 132 и в компаратор 133.
В результате повторения упомянутой выше операции на выходе модуля арифметической обработки по модулю 8 повторяются числовые значения от 0 до 7.
В компараторе 133, выход модуля арифметической обработки по модулю 8 сравнивают с пороговым значением, установленным заранее (4 на фиг. 6), и если он не меньше, чем пороговое значение, выводят единицу, а если он меньше, чем пороговое значение, выводят "0". Такое пороговое значение устанавливает числовое значение 1/2 для расчета модуля. В результате, на выходе компаратора 133 пропорции "1" и "0" становятся равными. После выполнения восстановления синхронизации выходных значений компаратора 133, D-триггер 134 выводит их в D-триггер 10, в схему 11 генерирования сигнала синхронизации на стороне выхода, в делитель 12 частоты на стороне выхода, в схему 14 параллельно/последовательного преобразования и подает на выход как выходной тактовый сигнал.
Как показано на фиг. 10, когда разность фаз между сигналом сравнения фазы на стороне входа и сигналом сравнения фазы на стороне выхода меньше 180 градусов, значение управления фазой становится отрицательным значением. Как показано на фиг. 12, в генераторе 13 с численным управлением, при вводе отрицательного значения управления фазой, управление осуществляется таким образом, что фаза выходного тактового сигнала может быть задержана. И наоборот, когда разность фаз больше, чем 180 градусов, значение управления фазой будет положительным значением, и управление осуществляется так, что можно достичь опережения по фазе выходного тактового сигнала. Таким образом, DPLL 2 выполняет управление так, чтобы разность фаз между сигналом сравнения фазы на стороне входа и сигналом сравнения фазы на стороне выхода всегда могла бы поддерживаться равной 180 градусам.
Пример 2
Блок-схема другого примера схемы подавления дрожания в соответствии с настоящим изобретением показана на фиг. 13.
На фиг. 13, в схеме 8 выбора параметра, выход контурного фильтра 9 используется как информация об ошибке фазы для определения синхронизации. При сравнении со случаем, когда выход компаратора 7 фазы используется для определения синхронизации, как это сделано в цепи подавления дрожания, показанной на фиг. 1, поскольку используют информацию об усредненной ошибке фазы, может быть выполнено более корректное определение синхронизации, хотя невозможно выполнить быстрое изменение параметра.
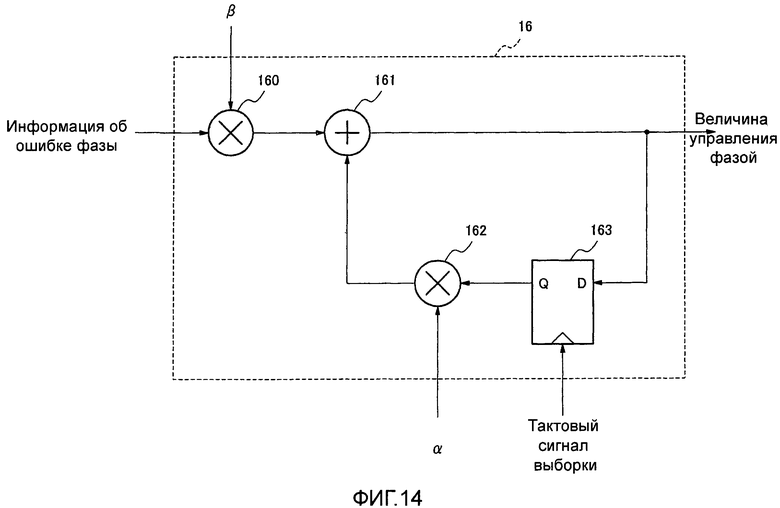
Модифицированный пример контурного фильтра 9, который используется в схеме подавления дрожания, показанной на фиг. 1, представлен на фиг. 14.
Здесь показан цифровой фильтр с характеристикой фильтра низкой частоты так же, как и в случае, показанном на фиг. 5, и его частотная характеристика выражена формулой (2). Из формулы (2) можно определить что, также путем использования структуры, показанной на фиг. 14, можно устанавливать ширину полосы путем изменения значений α и β.
H (jω)=β/(l-α·exp-jω)… (2)
То есть в соответствии с настоящим изобретением в схеме подавления дрожания, использующей контур цифровой фазовой автоподстройки частоты (DPLL), можно достичь одновременного сокращения времени вхождения в синхронизм и высокого эффекта подавления дрожания путем определения, находится ли контур в синхронном состоянии, по разности фаз, между входным тактовым сигналом и выходным тактовым сигналом, с последующим изменением характеристики контурного фильтра в соответствии с результатом определения.
На фиг. 1, компаратор 7 фазы детектирует ошибку фазы между сигналом сравнения фазы на стороне входа и сигналом сравнения фазы на стороне выхода и выводит информацию об ошибке фазы в схему 8 выбора параметра и в контурный фильтр 9. Схема 8 выбора параметра выполняет сравнение абсолютной величины введенной информации об ошибке фазы с заранее установленным пороговым значением ошибки фазы. Если информация об ошибке фазы не меньше, чем пороговое значение ошибки фазы непрерывно в течение заданной величины подсчета этапа прямой защиты, то определяется, что контур находится в асинхронном состоянии и выводятся параметры α 1 и β 1, которые расширяют полосу контурного фильтра 9.
Также, если она меньше, чем пороговое значение ошибки фазы непрерывно в течение заданной непрерывной величины подсчета этапа обратной защиты, то определяется, что контур находится в асинхронном состоянии, и выводятся значения коэффициентов α 2 и β 2, которые сужают полосу.
Здесь, компоненты, соответствующие "продолжению в течение заданной величины подсчета этапа обратной защиты", представляют собой счетчик 84 и компаратор 86 по фиг. 4. "Обратная защита" предназначена для улучшения надежности определения при выполнении определения синхронизации (определение перехода из асинхронного состояния в синхронное состояние). При описании со ссылкой на фиг. 4, в компараторе 81, хотя выполняется определение временной синхронизации, определяя, меньше ли введенная информация об ошибке фазы, чем пороговое значение ошибки фазы, или нет, такая информация об ошибке разности фаз не является информацией, которой можно абсолютно доверять (то есть несмотря на асинхронное состояние возможны случаи, когда информация об ошибке фазы будет меньше, чем пороговое значение ошибки фазы, и также случаи, когда информации об ошибке фазы будет больше, чем пороговое значение об ошибке фазы). В соответствии с этим в счетчике 84 выполняется подсчет, пока информация об ошибке фазы непрерывно меньше, чем пороговое значение ошибки фазы. Затем, в компараторе 86 выполняется сравнение величины подсчета и заданной величины подсчета этапа защиты (например, 3 раза), и если она не меньше, чем величина подсчета этапа защиты, определяется в первый раз, что состояние является асинхронным.
Таким образом, улучшается эффект подавления дрожания путем сокращения времени входа в синхронизм в результате расширения полосы контурного фильтра 9, если определяется, что контур находится в асинхронном состоянии, а также путем сужения полосы контурного фильтра 9, если определяется, что контур находится в синхронном состоянии.
Кроме того, указанные выше варианты выполнения обозначают пример предпочтительных вариантов воплощения настоящего изобретения, и различные виды модифицированного воплощения возможны в пределах диапазона, который не выходит за пределы сущности настоящего изобретения, которое не ограничивается этим. Например, в упомянутом выше примере, хотя было приведено описание, с использованием компаратора фазы, показанного на фиг. 3, настоящее изобретение не ограничивается этим, и можно использовать компаратор фазы типа EOR (исключающее ИЛИ).
Описание технического результата
Как описано выше, настоящее изобретение обеспечивает следующие результаты.
Первый результат состоит в том, что в схеме подавления дрожания, использующей DPLL, можно одновременно удовлетворить требование сокращения времени входа в синхронизм и эффекта высокой степени подавления дрожания путем определения, находится ли контур в синхронном состоянии или нет, по разности фаз между входным тактовым сигналом и выходным тактовым сигналом, с последующим изменением характеристик контурного фильтра в соответствии с результатом определения.
Второй эффект состоит в том, что благодаря использованию DPLL не требуется применять дорогостоящий управляемый напряжением генератор и другие аналоговые компоненты, и, таким образом, можно легко достичь интеграции, в результате чего снижается стоимость.
Третий эффект состоит в том, что благодаря использованию DPLL становится возможным реализовать постоянные характеристики подавления дрожания без влияния изменений из-за старения и температурных изменений.
Данная заявка основана и испрашивает приоритет на основе заявки № 2007-236563 на японский патент, поданной 12 сентября 2007 года, раскрытие которой включено в настоящий документ посредством ссылки.
Промышленная применимость
Настоящее изобретение можно использовать для устройства цифровой передачи данных и цифрового оборудования, в котором используется DPLL, и, таким образом, оно имеет промышленную применимость.
Краткое описание чертежей
Фиг. 1 - блок-схема, представляющая пример схемы подавления дрожания в соответствии с настоящим изобретением.
Фиг. 2 - блок-схема, представляющая пример схемы 4 последовательно/параллельного преобразования, используемой для схемы подавления дрожания, показанной на фиг. 1.
Фиг. 3 - блок-схема, представляющая пример компаратора 7 фазы, используемого для схемы подавления дрожания, представленной на фиг. 1.
Фиг. 4 - блок-схема, представляющая пример схемы 8 выбора параметра, используемой для схемы подавления дрожания, представленной на фиг. 1.
Фиг. 5 - блок-схема, представляющая пример контурного фильтра 9, используемого для схемы подавления дрожания, представленной на фиг. 1.
Фиг. 6 - блок-схема, представляющая пример генератора 13 с численным управлением, используемого для схемы подавления дрожания, представленной на фиг. 1.
Фиг. 7 - блок-схема, представляющая пример схемы 14 параллельно/последовательного преобразования, используемой для схемы подавления дрожания, показанной на фиг. 1.
Фиг. 8 - пример временной диаграммы схемы подавления дрожания, представленной на фиг. 1.
Фиг. 9 - пример временной диаграммы схемы 5 генерирования сигнала синхронизации на стороне входа и схемы 11 генерирования сигнала синхронизации на стороне выхода, используемых для схемы подавления дрожания, представленной на фиг. 1.
Фиг. 10 - пример временной диаграммы компаратора 7 фазы, используемого для схемы подавления дрожания, представленной на фиг. 1.
Фиг. 11 - пример временной диаграммы схемы 8 выбора параметра, используемой для схемы подавления дрожания, показанной на фиг. 1.
Фиг. 12 - пример временной диаграммы генератора 13 с численным управлением, показанного на фиг. 6.
Фиг. 13 - блок-схема другого примера схемы подавления дрожания в соответствии с настоящим изобретением.
Фиг. 14 - модификация контурного фильтра 9, используемого в схеме подавления дрожания, показанной на фиг. 1.
Пояснение номеров ссылочных позиций
1 Секция передачи тактовой частоты
2 Контур цифровой фазовой автоматической подстройки частоты (DPLL)
3 Генератор
4 Схема последовательно/параллельного преобразования
5 Схема генерирования сигнала синхронизации на стороне входа
6 Делитель на стороне входа
7 Компаратор фазы
8 Схема выбора параметра
9 Контурный фильтр
10 D-триггер
11 Схема генерирования сигнала синхронизации на стороне выхода
12 Делитель на стороне выхода
13 Генератор с численным управлением
14 Схема параллельно/последовательного преобразования
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подавления фазового дрожания | 1983 |
|
SU1218482A1 |
| СХЕМА ПОДАВЛЕНИЯ ДЖИТТЕРА | 1995 |
|
RU2110158C1 |
| СПОСОБ И УСТРОЙСТВО ПОДАВЛЕНИЯ КРОСС-ПОЛЯРИЗАЦИОННОЙ ПОМЕХИ | 2006 |
|
RU2369969C1 |
| СПОСОБ ИЗМЕРЕНИЯ ФАЗОВОГО ДРОЖАНИЯ | 1994 |
|
RU2101864C1 |
| СИСТЕМА ГОРИЗОНТАЛЬНОГО ОТКЛОНЕНИЯ | 1991 |
|
RU2215372C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ТАКТОВЫХ СИГНАЛОВ МОДУЛЯ ЭКСПОРТА И ВОЗБУДИТЕЛЯ | 2006 |
|
RU2407171C2 |
| Устройство для измерения фазового дрожания | 1987 |
|
SU1469556A1 |
| Устройство для информации с магнитной ленты (его варианты) | 1982 |
|
SU1301326A3 |
| Устройство для преобразования фазовых дрожаний импульсов цифровых систем передачи в шим-сигнал | 1977 |
|
SU705666A1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
Изобретение относится к устройству подавления дрожания фазы и к способу подавления дрожания фазы и может использоваться в цифровых сетях передачи данных. Достигаемый технический результат - сокращение времени вхождения в синхронизм, обеспечение высокой степени подавления дрожания. Устройство подавления дрожания фазы содержит контур цифровой фазовой автоподстройки частоты, средство для определения, находится ли контур в синхронном состоянии, по разности фаз между входным тактовым сигналом и выходным тактовым сигналом, и средство для изменения характеристик контурного фильтра в соответствии с результатом определения. Способ подавления дрожания фазы, использующий контур цифровой фазовой автоподстройки частоты, характеризуется тем, что определяют, находится ли контур в синхронном состоянии или нет, по разности фаз между входным тактовым сигналом и выходным тактовым сигналом и изменяют характеристики контурного фильтра в соответствии с результатом определения. 2 н. и 4 з.п. ф-лы, 14 ил.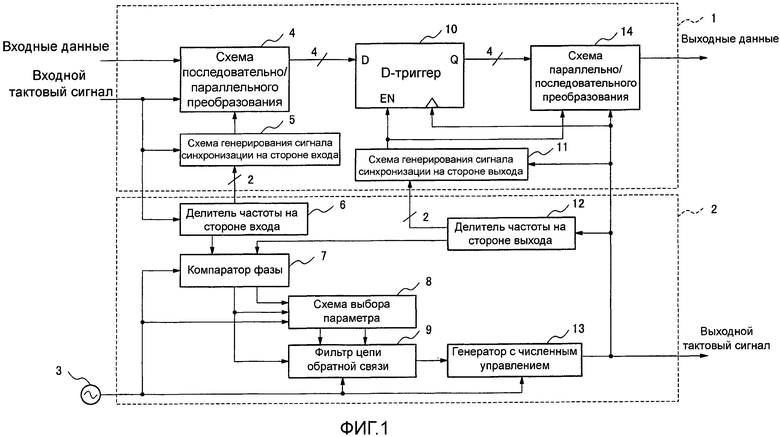
1. Устройство подавления дрожания фазы, содержащее контур цифровой фазовой автоподстройки частоты, средство для определения, находится ли контур в синхронном состоянии, по разности фаз между входным тактовым сигналом и выходным тактовым сигналом, и средство для изменения характеристик контурного фильтра в соответствии с результатом определения.
2. Устройство подавления дрожания фазы по п.1, содержащее: секцию передачи тактового сигнала для выполнения восстановления синхронизации входных данных, и контур цифровой фазовой автоподстройки частоты выполнен с возможностью изменения характеристик контурного фильтра в соответствии с результатом определения, находится ли контур в синхронном состоянии или нет.
3. Устройство подавления дрожания фазы по п.2, в котором упомянутая секция передачи тактового сигнала содержит: схему последовательно/параллельного преобразования, которая преобразует входные данные в параллельные данные; триггерную схему, которая изменяет синхронизацию упомянутых параллельных данных из упомянутой схемы последовательно/параллельного преобразования; и схему параллельно/последовательного преобразования, которая преобразует выходные данные упомянутой триггерной схемы в последовательные данные и выводит последовательные данные в качестве выходных данных, и в котором упомянутый контур цифровой фазовой автоподстройки частоты содержит: компаратор фазы, который сравнивает разность фаз между входным тактовым сигналом упомянутой секции передачи тактового сигнала и выходным тактовым сигналом; генератор с численным управлением, который передает тактовый сигнал в упомянутую триггерную схему и упомянутую схему параллельно/последовательного преобразования; контурный фильтр, установленный между упомянутым компаратором фазы и упомянутым генератором с численным управлением; и схему выбора параметра, которая выбирает и изменяет параметр упомянутого контурного фильтра в соответствии с выходом упомянутого компаратора фазы.
4. Устройство подавления дрожания фазы по п.3, в котором упомянутый компаратор фазы содержит: схему детектирования переднего фронта на стороне входа, которая детектирует передний фронт сигнала сравнения фазы на стороне входа, генерируемого путем деления упомянутого входного тактового сигнала; схему детектирования переднего фронта на стороне выхода, которая детектирует передний фронт сигнала сравнения фазы на стороне выхода, генерируемого путем деления упомянутого выходного тактового сигнала; счетчик, который детектирует разность фаз путем подсчета периода от переднего фронта упомянутого сигнала сравнения фазы на стороне входа до переднего фронта упомянутого сигнала сравнения фазы на стороне выхода, путем использования тактового сигнала выборки.
5. Способ подавления дрожания фазы, использующий контур цифровой фазовой автоподстройки частоты, содержащий определение, находится ли контур в синхронном состоянии или нет, по разности фаз между входным тактовым сигналом и выходным тактовым сигналом, и изменение характеристик контурного фильтра в соответствии с результатом определения.
6. Способ подавления дрожания фазы по п.5, в котором секция передачи тактового сигнала выполняет восстановление синхронизации для входных данных, и характеристики контурного фильтра изменяются в соответствии с результатом определения, находится ли контур цифровой фазовой автоподстройки частоты в синхронном состоянии или нет.
| СХЕМА И СПОСОБ ФАЗОВОЙ СИНХРОНИЗАЦИИ ДЛЯ СИСТЕМЫ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 1994 |
|
RU2127485C1 |
| СИНТЕЗАТОР ЧАСТОТ С ПЕРЕМЕННЫМИ УСИЛЕНИЕМ И ПОЛОСОЙ ПРОПУСКАНИЯ КОЛЬЦА ФАЗОВОЙ АВТОПОДСТРОЙКИ | 2003 |
|
RU2267860C2 |
| СИНТЕЗАТОР С ИЗМЕНЯЕМОЙ ЧАСТОТОЙ, СПОСОБ СИНТЕЗА ЧАСТОТЫ СИГНАЛА В СИНТЕЗАТОРЕ И РАДИОТЕЛЕФОН | 1992 |
|
RU2153223C2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 5909149 A, 01.06.1999. | |||

