Изобретение относится к бортовым системам управления космическими аппаратами (КА).
Известна система стабилизации, содержащая в каждом канале управления задатчик сигнала управления, датчик угла, датчик угловой скорости, элемент сравнения, суммирующий усилитель и релейный элемент [1].
Наиболее близкой к предлагаемому изобретению является система стабилизации углового движения КА, содержащая три канала управления, каждый канал управления содержит задатчик сигнала управления, датчик угловой скорости, последовательно соединенные датчик угла, элемент сравнения, второй вход которого соединен с задатчиком сигнала управления, суммирующий усилитель, второй вход которого соединен с датчиком угловой скорости, и релейный элемент [2].
В указанных системах стабилизации традиционно используются в качестве исполнительных органов реактивные двигатели, обеспечивающие управление по трем осям космического аппарата.
Недостатком известных решений является то, что традиционно для реализации 3-х каналов стабилизации КА требуется 6 пар реактивных двигателей. Также при независимом управлении, в отдельные моменты времени, в общем случае, могут быть включены одновременно 6 двигателей, что может быть неприемлемо с точки зрения выполнения требований по энергопотреблению.
Технической задачей, решаемой в предлагаемой системе стабилизации, является снижение энергопотребления и уменьшение веса системы.
Указанная техническая задача достигается тем, что в известную систему стабилизации углового движения космического аппарата, содержащую три канала управления, каждый из которых содержит задатчик сигнала управления, датчик угловой скорости, последовательно соединенные датчик угла, элемент сравнения, второй вход которого соединен с выходом задатчика сигнала управления, суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости, и релейный элемент, дополнительно введены последовательно соединенные блок периодической коммутации, переключатель, три сигнальных входа которого соединены соответственно с выходом релейного элемента каждого канала управления, и блок реактивных двигателей, выход которого является выходом системы стабилизации.
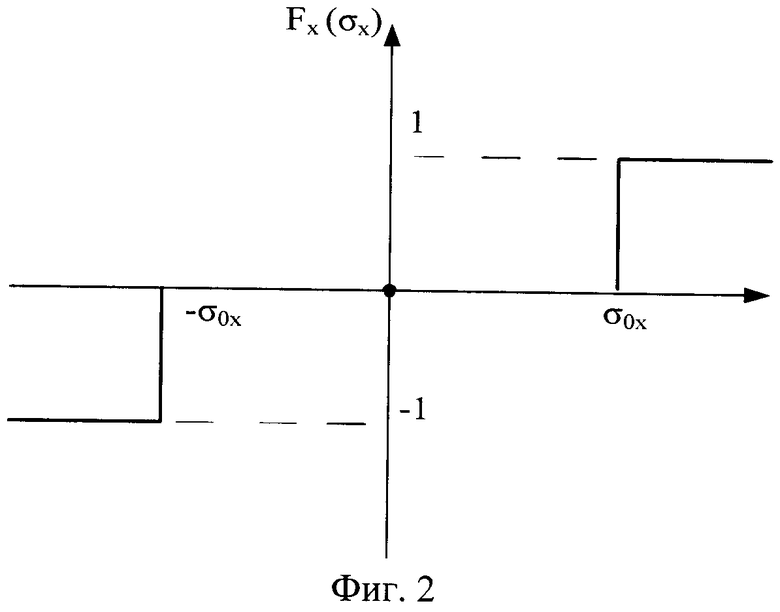
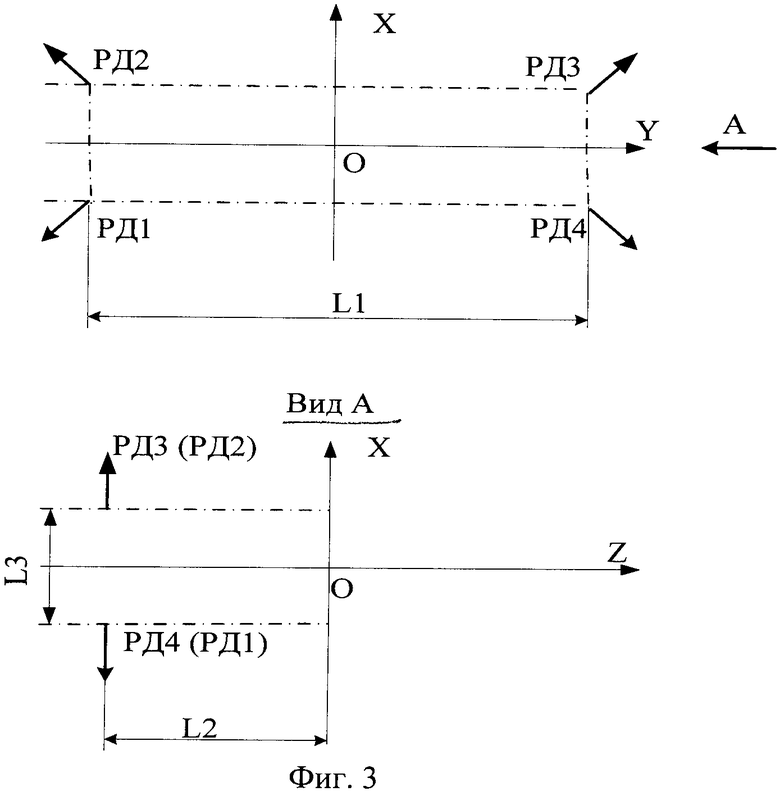
На фиг.1 представлена блок-схема системы стабилизации углового движения КА, на фиг.2 - статическая характеристика релейного элемента с зоной нечувствительности канала управления КА по оси Х (аналогичные характеристики имеют релейные элементы в каналах управления относительно осей У и Z), на фиг.3 представлен один из вариантов схемы расположения реактивных двигателей.
Система стабилизации углового движения КА (фиг.1) содержит три канала управления 1, 2 и 3 относительно 3-х осей КА соответственно. Каждый канал управления, например канал управления 1, имеет задатчик сигнала управления 4 (ЗСУ), датчик угловой скорости 5 (ДУС), последовательно соединенные датчик угла 6 (ДУ), элемент сравнения 7 (ЭС), второй вход которого соединен с выходом задатчика сигнала управления 4, суммирующий усилитель 8 (СУ), второй вход которого соединен с выходом датчика угловой скорости 5, и релейный элемент 9 (РЭ), последовательно соединенные блок периодической коммутации 10 (БПК), переключатель 11 (ПК), три сигнальных входа которого соединены соответственно с выходом релейного элемента 9 каждого канала управления, и блок реактивных двигателей 12 (БРД), выход которого является выходом системы.
Система стабилизации углового движения КА работает следующим образом.
В каналах управления 1, 2 и 3 задатчиком сигнала управления 4 задаются соответственно сигналы управления γзад(t), Ψзад(t), ϑзад(t). В каждом канале по соответствующим сигналам управления γзад(t), Ψзад(t), ϑзад(t), текущим сигналам углового положения γ(t), Ψ(t), ϑ(t) и угловой скорости ωx(t), ωy(t), ωz(t) КА формируется закон регулирования (стабилизации). Например, в канале управления 1 этот закон формируется блоками 4÷9.
В суммирующем усилителе 8 формируется сигнал управления σx(t) в виде:

где Δγ(t) - сигнал рассогласования, формируемый элементом сравнения 7 по сигналам γзад(t) от задатчика сигнала управления 4 и γ(t) от датчика угла 6:

Kγ, Kωх - передаточные числа суммирующего усилителя 8;
ωx(t) - сигнал угловой скорости КА, поступающий от датчика угловой скорости 5.
Далее сигнал управления σx(t) поступает на вход релейного элемента 9, характеристика которого представлена на фиг.2. Величина зоны нечувствительности σ0х релейного элемента 9 определена требуемой точностью стабилизации. Точность стабилизации γ0 соответствует:

Полученный на выходе релейного элемента 9 сигнал Fx(σx) поступает на 1-й вход переключателя 11.
Аналогичным образом в каналах управления 2 и 3 системы стабилизации формируются соответственно сигналы Fy(σy) и Fz(σz), поступающие на 2 и 3 входы переключателя 11.
Блок периодической коммутации 10 задает период переключений Т сигналов управления Fx(σx), Fy(σy) и Fz(σz) на входе блока реактивных двигателей 12 для обеспечения требуемой точности по углу.
На фиг.3 представлен один из вариантов схемы расположения реактивных двигателей РД1, РД2, РД3 и РД4, позволяющий реализовать предложенную систему стабилизации углового движения КА. В данном варианте реактивные двигатели расположены относительно друг друга на расстоянии L1=2,9 м (по оси У), L2=1,25 м (по оси Z) и L3=0,75 м (по оси X).
По сигналам управления Fx(σx), Fy(σy), Fz(σz) в блоке реактивных двигателей 12 осуществляется включение соответствующих 2-х двигателей стабилизации, создающих управляющий момент Мупр.
Включение двигателей для варианта расположения реактивных двигателей, представленного на фиг.3, осуществляется в соответствии с таблицей 1.
Таким образом, предложенная система стабилизации углового движения КА позволяет уменьшить энергопотребление и вес системы за счет уменьшения количества используемых реактивных двигателей (вместо 12 двигателей используется 4 двигателя).
Источники информации
1. Б.В.Раушенбах, Е.Н.Токарь. Управление ориентацией космических аппаратов. Москва, 1974, стр.144.
2. Васильев В.Н. Системы ориентации космических аппаратов. Москва, 2009, стр.310.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |
| Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа | 2015 |
|
RU2625687C2 |
| Устройство сброса кинетического момента и управления ориентацией космического аппарата с использованием магнитной системы | 2022 |
|
RU2797430C1 |
| Система тормозного оборудования для железнодорожного транспортного средства | 2021 |
|
RU2763060C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| Ограничитель грузоподъемности стрелового крана | 1990 |
|
SU1805094A1 |
| СТЕНД ПРОВЕРКИ ИЗДЕЛИЙ НА ГЕРМЕТИЧНОСТЬ | 2022 |
|
RU2794414C1 |
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ | 2006 |
|
RU2356803C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
Изобретение относится к космической технике и может быть использовано в бортовых системах управления космическими аппаратами. Система стабилизации углового движения космического аппарата содержит три канала управления, каждый канал управления содержит задатчик сигнала управления, датчик угловой скорости, блок периодической коммутации, переключатель, блок реактивных двигателей, последовательно соединенные датчик угла, элемент сравнения, суммирующий усилитель, релейный элемент. Элемент сравнения соединен с задатчиком сигнала управления, суммирующий усилитель соединен с датчиком угловой скорости, блок периодической коммутации соединен с переключателем. Изобретение позволяет снизить энергопотребление, уменьшить массу системы, минимизировать количество используемых реактивных двигателей. 1 табл., 3 ил.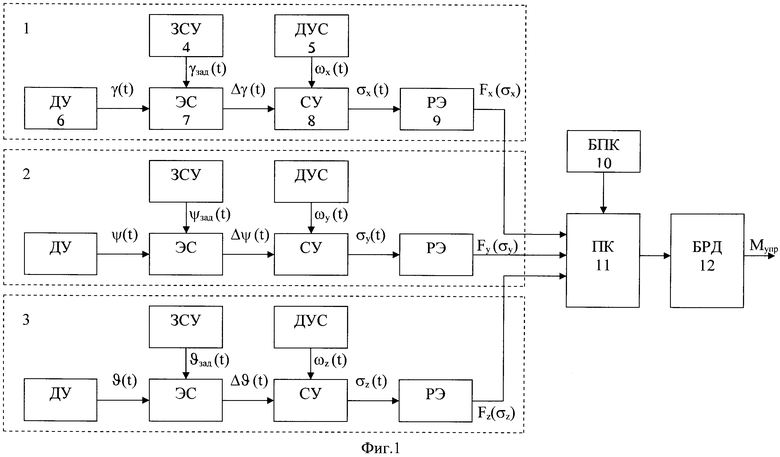
Система стабилизации углового движения космического аппарата, содержащая три канала управления, каждый канал управления содержит задатчик сигнала управления, датчик угловой скорости, последовательно соединенные датчик угла, элемент сравнения, второй вход которого соединен с выходом задатчика сигнала управления, суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости, и релейный элемент, отличающаяся тем, что система содержит последовательно соединенные блок периодической коммутации, переключатель, три сигнальных входа которого соединены соответственно с выходом релейного элемента каждого канала управления, и блок реактивных двигателей, выход которого является выходом системы стабилизации.
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ ВОЗДЕЙСТВИЙ | 1998 |
|
RU2158951C2 |
| RU 95102732 А1, 20.02.1997 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270790C2 |
| US 8000849 В2, 16.08.2011 | |||
| ЕР 790542 В1, 19.01.2000 | |||
| ЕР 739818 А1, 30.10.1996. | |||

