Настоящее изобретение относится к мобильному роботу с магнитным взаимодействием.
В некоторых применениях в области техники поверхности, подлежащие технологической обработке или очистке разными способами, например подлежащие привариванию друг к другу, могут контролироваться роботом, снабженным колесами, обеспечивающими возможность перемещения робота по поверхности. Робот оснащен датчиками, способными контролировать поверхность посредством детектирования, например, качества выполненного процесса.
Когда материал, из которого выполнена поверхность, позволяет, т.е. когда он ферромагнитный, робот магнитно соединяется с поверхностью посредством постоянных магнитов. Благодаря этой фиксирующей системе робот также может вертикально подниматься или даже поворачиваться на 360°. Следовательно, могут контролироваться не только плоские поверхности, но также изогнутые - например, цилиндрические - поверхности.
До сих пор роботы с магнитным взаимодействием были оснащены колесами, которые выполнены, по меньшей мере снаружи, в контакте с поверхностью, из постоянных магнитов или электромагнитов.
Решения предшествующего уровня техники имеют значительный недостаток. Несмотря на способность работать, они требуют чрезмерно большой мощности для приведения в движение колес для преодоления магнитного поля, которое стремится сделать колеса неподвижными. Следовательно, сложно добиться свободного движения со скольжением по поверхности, подлежащей контролю.
Перемещение робота требует мощного электродвигателя, и, следовательно, существует необходимость электропроводки к удаленному источнику питания, делая робот тяжелым и громоздким.
Цель настоящего изобретения состоит в том, чтобы предложить мобильный робот с магнитным взаимодействием, который способен преодолеть, по меньшей мере частично, вышеописанные недостатки роботов согласно предшествующему уровню техники.
Эта цель достигается посредством робота в соответствии с пунктом 1 формулы изобретения.
Дополнительные признаки и преимущества робота в соответствии с настоящим изобретением станут понятнее из нижеследующего описания его предпочтительных неограничивающих вариантов осуществления со ссылкой на прилагаемые чертежи, на которых:
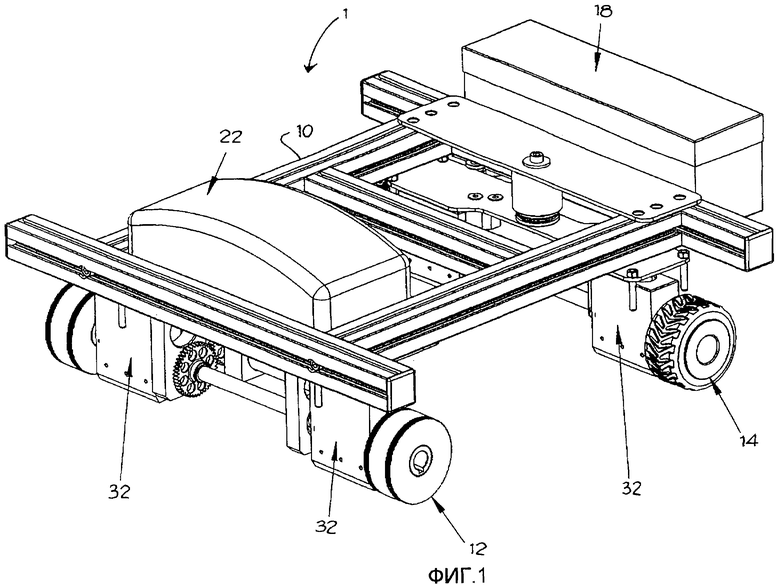
- на фиг.1 показан перспективный вид робота в соответствии с изобретением;
- на фиг.2 показан перспективный вид робота снизу;
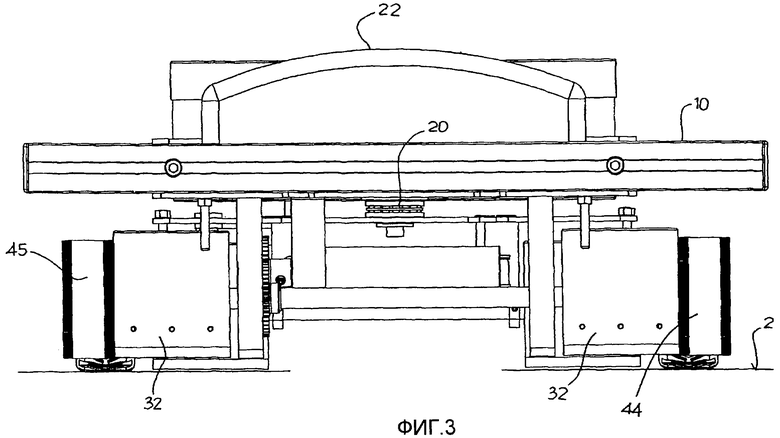
- на фиг.3 показан вид сбоку робота;
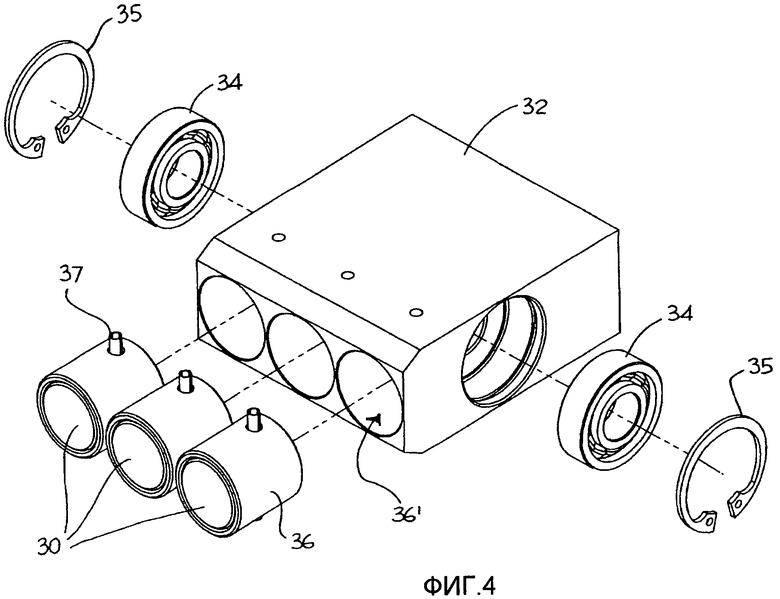
- на фиг.4 показан вид с разнесением деталей опоры с постоянными магнитами;
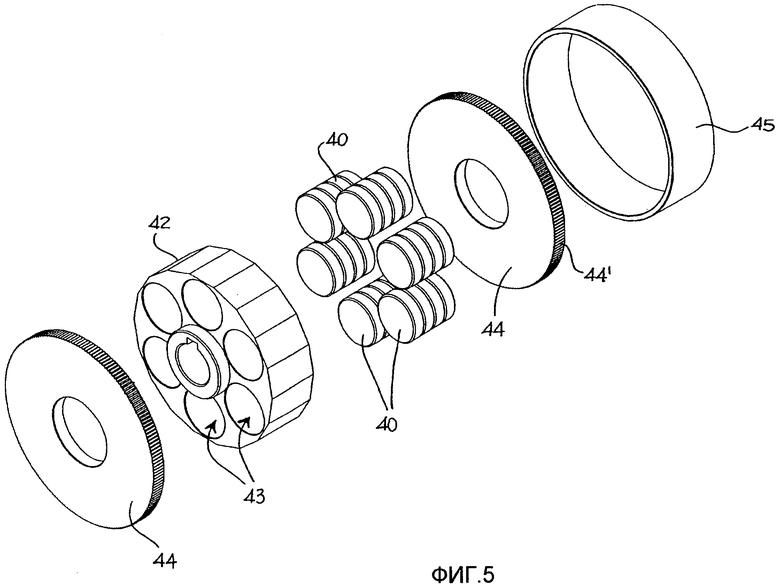
- на фиг.5 показан вид с разнесением деталей колеса робота со вспомогательными магнитами;
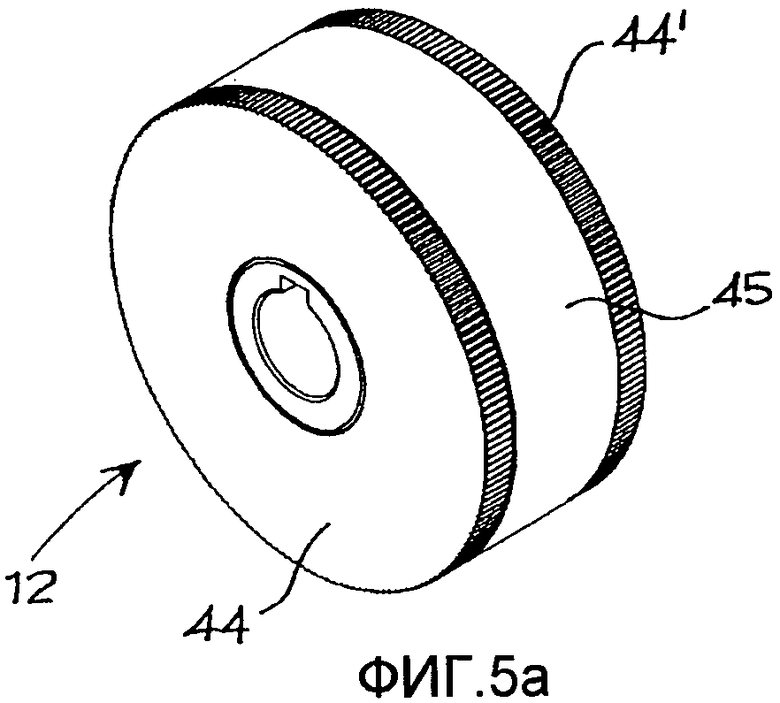
- на фиг.5а показано собранное колесо;
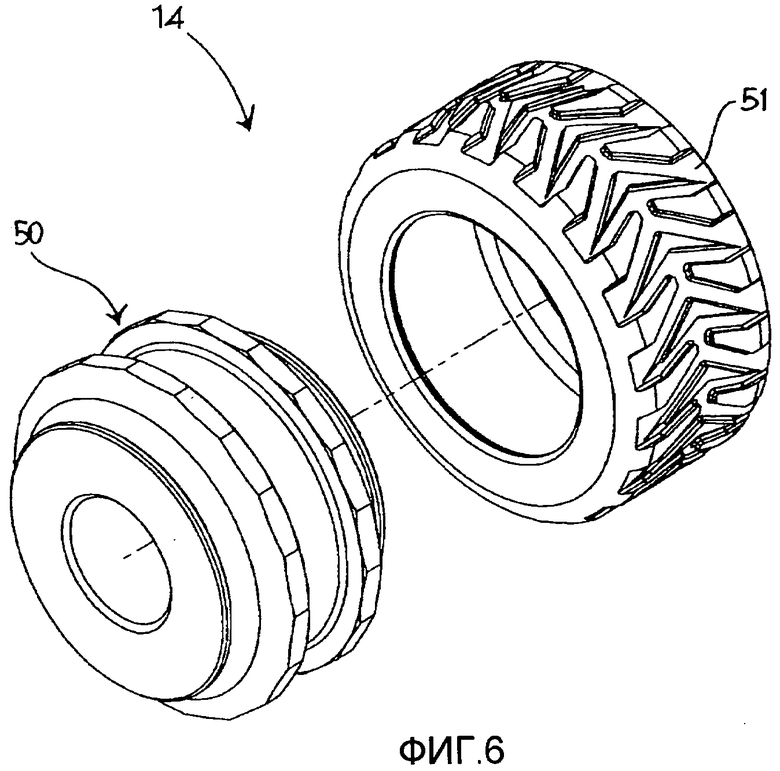
- на фиг.6 показан вид с разнесением деталей другого колеса робота;
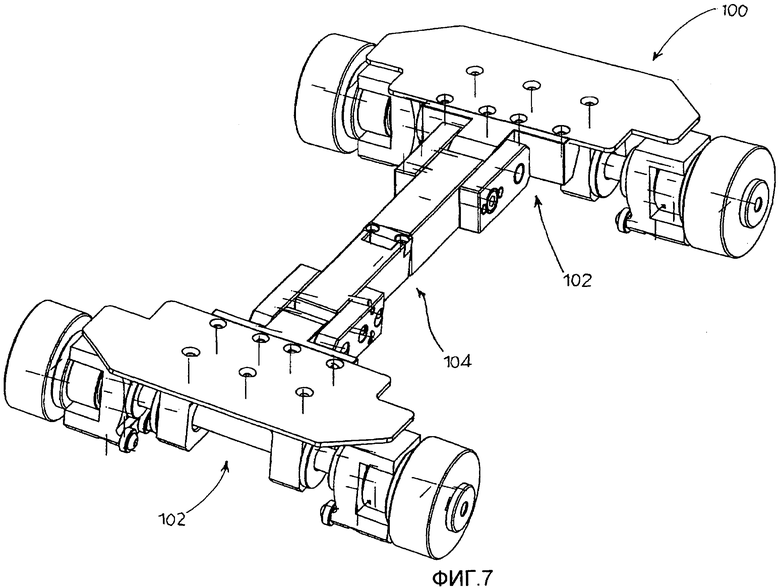
- на фиг.7 показан перспективный вид рамы робота в соответствии с одним другим вариантом осуществления;
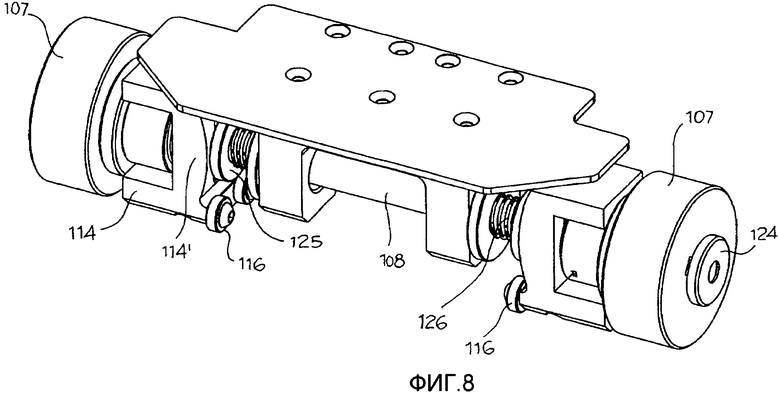
- на фиг.8 показан увеличенный перспективный вид одной из двух поперечных осей, поддерживающих раму, показанную на фиг.7, и обеспечивающих возможность ее скольжения по поверхности, подлежащей контролю;
- на фиг.9 показано частичное продольное сечение поперечной оси на фиг.8;
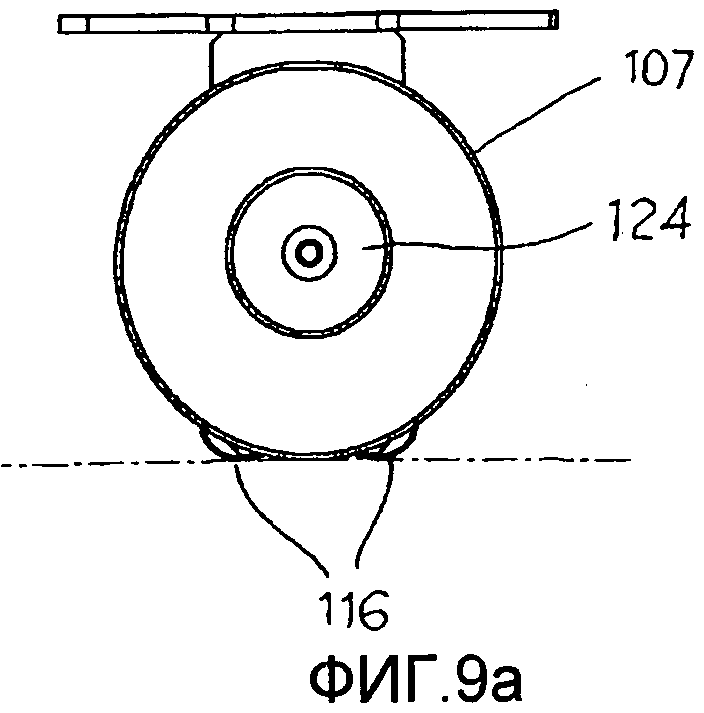
- на фиг.9а показан вид сбоку поперечной оси;
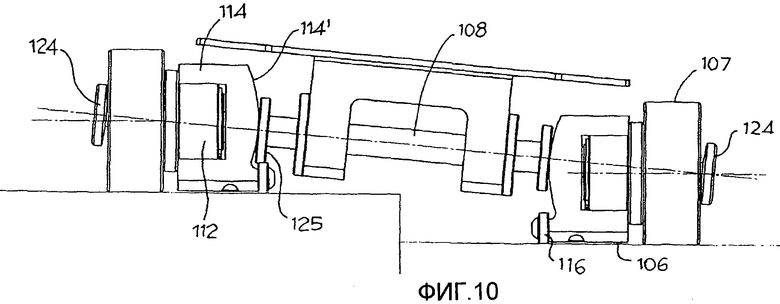
- на фиг.10 показан вид поперечной оси, наклоненной относительно горизонтали;
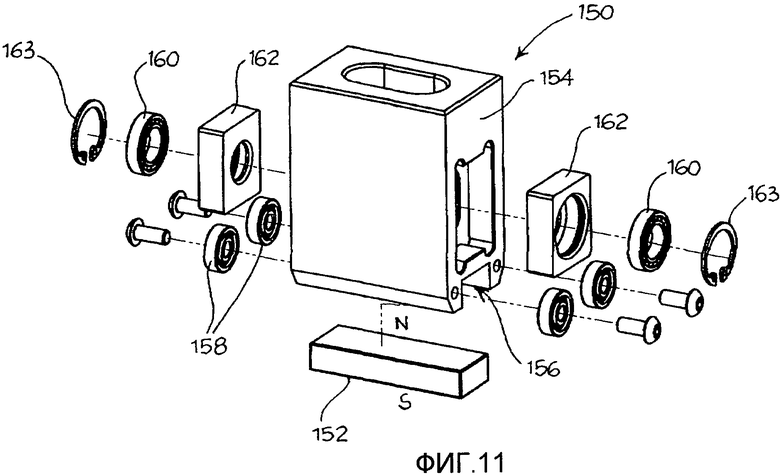
- на фиг.11 показан вид с разнесением деталей опоры для магнитов в соответствии с другим вариантом осуществления; и
- на фиг.12 показана опора на фиг.11, собранная надлежащим образом.
На вышеприведенных фигурах ссылочная позиция 1 в целом обозначает мобильный робот с магнитным взаимодействием в соответствии с изобретением.
Робот 1 включает в себя раму 10 с колесами 12, 14, обеспечивающими возможность скольжения робота по опорной поверхности 2, которая представляет собой материал с высокой магнитной проницаемостью, например ферромагнитный материал. Робот 1 выполнен в виде подвижной каретки, способной перемещаться по поверхности, например участку обшивки, подлежащей контролю.
В соответствии с предпочтительным вариантом осуществления робот 1 оснащен по меньшей мере одним ведущим колесом 12, обеспечивающим возможность независимого перемещения по поверхности, с которой он сцеплен магнитным способом. Это не исключает возможности ручного перемещения описанного ниже робота по опорной поверхности.
В соответствии с предпочтительным вариантом осуществления по меньшей мере одно ведущее колесо 12 приводится в движение посредством редуктора 16 двигателя.
Предпочтительно, редуктор 16 двигателя приводится в действие электрическим образом с постоянным напряжением, например, 12В, подаваемым посредством аккумулятора 18, прикрепленного к раме 10 робота 1. Следовательно, робот не требуется присоединять к источнику питания посредством электрического кабеля.
По меньшей мере одно колесо, например направляющее колесо 14, соединено с рулевым механизмом 20.
Следовательно, робот 1 имеет возможность перемещения вперед, назад, направо и налево.
В соответствии с предпочтительным вариантом осуществления эти перемещения регулируются посредством переносного радиопередатчика дистанционного управления посредством CPU 22, прикрепленного к раме робота.
В одном возможном варианте осуществления робот оснащен по меньшей мере одним постоянным магнитом 30, способным к магнитному взаимодействию с опорной поверхностью 2 для того, чтобы сцеплять робот с указанной поверхностью.
Постоянный магнит 30 установлен таким образом, чтобы скользить вдоль опорной поверхности 2. Другими словами, магнит 30 является отделенным от ферромагнитной поверхности 2, но удерживается на заданном расстоянии, способном создавать магнитную силу притяжения такую, чтобы позволять роботу 1 оставаться сильно сцепленным с опорной поверхностью 2, вне зависимости от его направления или перемещения.
Для того чтобы увеличить до максимума интенсивность магнитного поля, оказывающего воздействие на опорную поверхность 2, и, следовательно, силу притяжения, магнит 30 установлен одним из его полюсов, направленным к опорной поверхности 2. Другими словами, ось двух полюсов магнита 30 является перпендикулярной к поверхности 2.
Очевидно, показатели, которые определяют напряженность магнитного поля между по меньшей мере одним магнитом 30 и опорной поверхностью 2, то есть расстояние между магнитом и поверхностью, тип, форма и размер магнита будут выбираться исходя из применения, перемещения магнита, массы робота (плюс любая нагрузка, например датчик).
В особенно предпочтительном варианте осуществления по меньшей мере один магнит 30 посажен в опору 32, которая имеет возможность свободно качаться таким образом, что магнит всегда находится в положении минимального расстояния от опорной поверхности, то есть в положении максимальной интенсивности поля.
Предпочтительно, магниты 30 посажены близко к точкам контакта между роботом 1 и опорной поверхностью, то есть близко к колесам 12, 14.
В иллюстративном варианте осуществления робот оснащен парой ведущих колес 12 и парой ведомых колес 14.
В соответствии с предпочтительным вариантом осуществления робот 1 оснащен четырьмя опорами 32, например, содержащими по существу параллелепипедальные блоки, каждый содержащий несколько магнитов 30. Каждый магнит, например, имеет форму диска или пластинки и имеет поверхности, параллельные относительно опорной поверхности робота. Блоки 32, предпочтительно, посажены на вращающиеся валы 13, 15 колес 12, 14. Каждый блок 32 оснащен шарикоподшипниками 34 для обеспечения возможности свободного вращения вокруг вала, на который он посажен. Шарикоподшипники 34 посажены в опору 32, например, посредством стопорного кольца 35.
В одном варианте осуществления каждый магнит 30 прикреплен или приклеен к держателю 36, например, цилиндрическому по форме, посаженному в гнездо 36 внутри опоры 32 и удерживающемуся на месте посредством, например, штифта 37.
В одном варианте осуществления магниты 30 являются параллельными друг другу, например, выровненными параллельно относительно вала 13.
В одном варианте осуществления постоянные магниты 30 покрыты неодимом.
В соответствии с предпочтительным вариантом осуществления дополнительные постоянные магниты 40, далее называемые добавочными магнитами, посажены в корпус 42 по меньшей мере одной пары соосных колес, предпочтительно, ведущих колес 12.
В одном варианте осуществления эти добавочные магниты 40 содержат небольшие цилиндры, которые, когда закреплены в колесе, поворачивают соответствующую ось параллельно относительно оси колес. В возможном варианте осуществления колеса 12 включают в себя центральный цилиндрический корпус 42, например, из алюминия, в котором, вокруг отверстия для вращающегося вала 13, выполнен ряд корончатых цилиндрических гнезд 43, в которые посажены цилиндрические магниты 40.
Центральный корпус 42 закреплен между парой боковых дисков 44, выполненных из ферромагнитного материала, с отфрезерованной внешней поверхностью 44 для взаимодействия с поверхностью 2. Предпочтительно, диски 44 прикреплены к центральному корпусу 42 посредством магнитного поля, созданного добавочными магнитами 40.
Вокруг поверхности 42' вращения центрального корпуса 42 колеса 12 закреплен противоскользящий пояс 45, выполненный из резины или материала аналогичного типа.
Назначение добавочных магнитов 40 состоит в создании магнитного поля, взаимодействующего с опорной поверхностью 2 из ферромагнитного материала, для обеспечения того, чтобы пояс 45 всегда плотно держался на опорной поверхности 2, предпочтительно, посредством оказания на него оптимального давления. Таким образом, колеса не проскальзывают на поддерживающей поверхности, в частности, ведущих колес, даже когда поверхность 2 влажная, например, для способствования ультразвуковым измерениям.
Предпочтительно, пояс 45 удерживается на месте посредством двух боковых дисков 44, фиксирующих с противоположных сторон колеса.
Очевидно, что при его положении на колесах корончатая поверхность добавочных магнитов 40 оказывает воздействие на опорную поверхность 2, при этом, когда колесо вращается, один магнит единовременно оказывается самым близким к поверхности. Предпочтительно, это производит требуемое действие по увеличению сцепления робота с поверхностью посредством предотвращения проскальзывания колес, без препятствования их надлежащему вращению, как только они создадут контакт с ферромагнитной поверхностью.
Относительно конструкции колес, центральный корпус 42 ведущих колес 12 и/или корпус 50 направляющих колес 14 имеет многостороннюю поверхность качения, то есть многоугольную форму, способную дополнительно улучшить противоскользящее действие.
На корпус 50 направляющих колес 14, например, может быть установлена обработанная шина 51.
В соответствии с вариантом осуществления проиллюстрированным на фиг.7-10 согласно изобретению, робот имеет раму 100 с продольной осью 101, соединяющую две поперечные оси 102, для целей скольжения по ферромагнитной поверхности, подлежащей контролю. Продольная ось 101 имеет шарнирное соединение 104, позволяющее двум поперечным осям 102 поворачиваться независимо от продольной оси. Это обеспечивает возможность перемещения роботу по шероховатым или грубым поверхностям, например вдоль сварных швов, подлежащим проверке, без потери сцепления, как показано на фиг.10.
В соответствии с предпочтительным вариантом осуществления около каждого колеса 107 робота, каждая ось 102 оснащена постоянным магнитом 106. Колесо 107, предпочтительно, может включать в себя добавочные магниты и/или может быть оснащено шиной и/или многосторонней поверхностью качения, как описано выше относительно фиг.5 и 6.
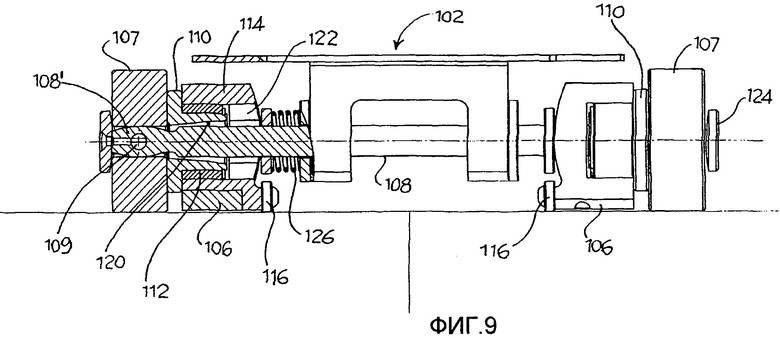
Каждое колесо 107 прикреплено к концу вращающегося вала 108, например, посредством зажимного штифта 109. Поддерживающий фланец 110, по меньшей мере для шарикоподшипника 112, проходит в осевом направлении и внутрь от колеса 107. На подшипник 112 посажена качающаяся опора 114 по меньшей мере для одного постоянного магнита 106, соединяющего робот с опорной поверхностью.
Эта опора 114 имеет полость, снизу которой прикреплен постоянный магнит 106, например, посредством давления, с одним из двух противоположных полюсов, направленным к ферромагнитной поверхности. В соответствии с одним вариантом осуществления этот магнит 106 является прямоугольным, более длинным и более широким, чем толщина, и с наибольшими поверхностями, параллельными относительно ферромагнитной поверхности. Передняя поверхность постоянного магнита, направленная к поверхности скольжения, удерживается на такой высоте, чтобы она соприкасалась с указанной поверхностью без нахождения в фактическом контакте с ней.
В соответствии с особенно предпочтительным вариантом осуществления опора 114 для магнита 106 находится в контакте с поверхностью скольжения посредством ролика 116 или, предпочтительно, двух роликов, например, выполненных с шарикоподшипниками. Очевидно, с помощью этой двойной опоры, заданной посредством колеса 107 и роликов 116, магниту обеспечена возможность расположения настолько близко к ферромагнитной поверхности, насколько возможно, без риска возникновения контакта.
Другими словами, ролики 116 действуют, вместе с колесом, в качестве распорок, гарантируя незначительное расстояние между магнитом и ферромагнитной поверхностью.
Чтобы поперечные оси 102 могли вращаться вокруг продольной оси рамы, при этом одновременно гарантируя, что колеса и ролики сцеплены с поверхностью скольжения, вал 108 должен быть способным наклоняться относительно колес 107 и качающейся опоры 114 для магнита.
Для этой цели, в соответствии с особенно предпочтительным вариантом осуществления, осевое гнездо 120 для вращающегося вала 108, который проходит во фланец 110 опоры подшипника, имеет коническую форму, расширяющуюся по направлению вовнутрь, обеспечивая возможность наклона вала 108 относительно оси фланца.
В соответствии с одним вариантом осуществления опора 114 для магнита имеет осевую часть 114', проходящую по направлению вовнутрь, за пределами подшипника, таким образом, чтобы заключать в себя магнит 106, который длиннее, чем ширина подшипника. Имеющее форму паза отверстие 122, обеспеченное в указанной осевой части 114', размещает вращающийся вал 108, обеспечивая возможность качания вала относительно опоры.
В соответствии с одним вариантом осуществления конец 108' вращающегося вала, на который посажено колесо 107, имеет округленную внешнюю поверхность, например заостренную. Таким образом, он может качаться внутри осевого гнезда колеса 107.
Предпочтительно, колесо 107, фланец 110 и опора 114 для магнита прижаты друг к другу вдоль оси посредством внешней шайбы 124, прикрепленной к колесу 107 и крепко прикрученной к концу вращающегося вала 108, и внутренней шайбы 125, проходящей вокруг вращающегося вала и прижатой к опоре для магнита, например, посредством пружины 126.
Следовательно, колесо, фланец с подшипником и опора для магнита являются собранными в узел для создания единого узла колеса с магнитом, находящимся в положении нависания над поверхностью скольжения.
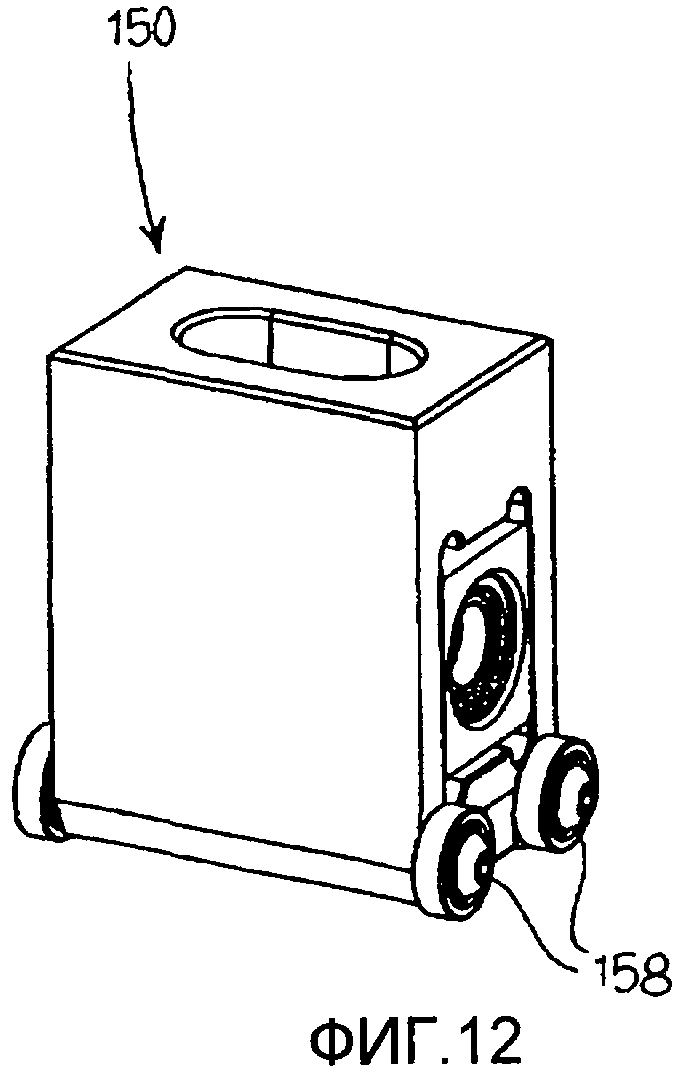
Фиг.11 и 12 показывают другой вариант осуществления качающейся опоры 150 по меньшей мере для одного магнита 152. Этот вариант осуществления является особенно подходящим для применений с трубами небольшого диаметра, например, диаметрами меньше, чем 1 метр, в которых робот должен быть компактным. Одна качающаяся опора 150, в этом варианте осуществления, посажена по центру по меньшей мере одного из двух вращающихся валов колес.
Опора 150 включает в себя имеющий форму призмы корпус 154 с передней поверхностью, направленной к поверхности скольжения, в которой имеется гнездо 156 по меньшей мере для одного постоянного магнита 152, расположенного, как ранее описано, одним полюсом, направленным к ферромагнитной поверхности, подлежащей контролю. Предпочтительно, магнит 152 является прямоугольным или имеет форму прутка и посажен горизонтально, например запрессован в гнездо 156.
Контакт между опорой 150 и поверхностью скольжения осуществляется посредством боковых роликов 158, например, двух для каждого конца опоры, предпочтительно, прикрепленных к выступам, окружающим гнездо 156 магнита. Эти ролики 158 действуют в качестве распорок, аналогично описанию выше, для опорного элемента 114.
Для обеспечения качания опора 150 посажена на вращающийся вал посредством пары подшипников 160, размещенных в соответствующих корпусах 162, прижатых к поддерживающему корпусу, например, посредством стопорного кольца 163.
В соответствии с предпочтительным вариантом осуществления подшипники 160 являются подшипниками качающегося типа, для обеспечения возможности качания вращающегося вала, в этом случае тоже, хотя и меньшего, чем в предшествующем примере с двойной качающейся опорой для каждой поперечной оси.
Робот в соответствии с изобретением, в частности, является подходящим для переноса датчика для целей выполнения неразрушающего контроля сварных швов и герметичности металлического покрытия, например углеродистой стали. В частности, робот 1 предназначен для применений, включающих цилиндрическую обшивку (например, резервуары большой длины или большого диаметра), выполненную посредством каландрования и сварки плоской обшивки. Следует отметить, что для ультразвуковых датчиков, чтобы работать с наилучшей эффективностью, эти металлические листы должны быть влажными.
Робот устанавливается на обшивке, подлежащей контролю, посредством постоянного магнитного поля, созданного магнитами, на некотором расстоянии от обшивки и, следовательно, без препятствования вращению колес, как происходит в случае роботов по предшествующему уровню техники. Следовательно, не требуется мощного двигателя. Достаточно небольшого редуктора двигателя, питающегося от 12 В аккумулятора.
Расположение магнитов 30, 40, 106, 152 позволяет роботу подниматься вертикально с его нагрузкой и поворачиваться на 180° без потери сцепления, даже на влажной и скользкой поверхности.
Так как робот в соответствии с этим изобретением не требует силовых кабелей для его перемещения, информация с датчиков, предпочтительно, может быть передана беспроводным путем. Следовательно, робот 1 является полностью свободно располагающимся, компактным и простым в обращении.
В соответствии с этим изобретением, в значительной степени благодаря уменьшению массы двигателя, робот имеет общую массу (включая блок питания) меньше, чем 15 кг, значительно меньше нормативного максимума для масс, подлежащих поднятию операторами (30 кг для мужчин, 20 кг для женщин).
Следовательно, предложенный робот является очень простым и легким для использования и переноса.
Специалист в данной области может, в соответствии с конкретными потребностями, модифицировать, приспособить или заменить некоторые элементы другими элементами аналогичной или идентичной функции, не выходя за пределы объема нижеследующей формулы изобретения. Каждый из признаков, описанных для конкретного варианта осуществления, может быть объединен независимо от других описанных форм варианта осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТ С МАГНИТНЫМИ ДВИЖИТЕЛЯМИ | 2014 |
|
RU2585396C1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕТАЛЛОКОНСТРУКЦИЙ И ТРУБОПРОВОДОВ | 2022 |
|
RU2778619C1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ ПЕРЕНОСНОГО ЭЛЕКТРОННОГО ОБОРУДОВАНИЯ СО СНАБЖЕННЫМ МАГНИТНОЙ ОПОРОЙ АНКЕРНЫМ УСТРОЙСТВОМ | 2009 |
|
RU2497699C2 |
| КОЛЛАБОРАТИВНОЕ СВАРОЧНОЕ УСТРОЙСТВО | 2024 |
|
RU2833865C1 |
| САМОХОДНАЯ ЧИСТЯЩАЯ МАШИНА | 2023 |
|
RU2830479C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ БАРАБАНА С МАГНИТАМИ В СБОРЕ С ДВУМЯ УСТОЙЧИВЫМИ СОСТОЯНИЯМИ | 2015 |
|
RU2670877C9 |
| Устройство для распределения тепла в кальяне | 2020 |
|
RU2779692C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ НАРАЩИВАНИЯ КОСТИ | 2010 |
|
RU2575313C2 |
| МАГНИТНОЕ ПРИВОДНОЕ УСТРОЙСТВО | 2014 |
|
RU2651933C2 |
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ СОЕДИНИТЕЛЬ | 1998 |
|
RU2197774C2 |
Изобретение относится к мобильному роботу с магнитным взаимодействием. Робот содержит раму (10), оснащенную колесами для перемещения по опорной поверхности с высокой магнитной проницаемостью и одним постоянным магнитом (30), способным магнитно взаимодействовать с указанной поверхностью для сцепления робота с поверхностью. Магнит (30) установлен таким образом, чтобы скользить вдоль опорной поверхности. Магнит (30) размещен в опоре (32), способной свободно качаться, таким образом, что полюс магнита всегда находится в положении минимального расстояния от опорной поверхности, где каждая опора (32) посажена таким образом, чтобы качаться на вращающемся валу колес. Достигается возможность свободного движения со скольжением по поверхности, подлежащей контролю. 12 з.п. ф-лы, 14 ил.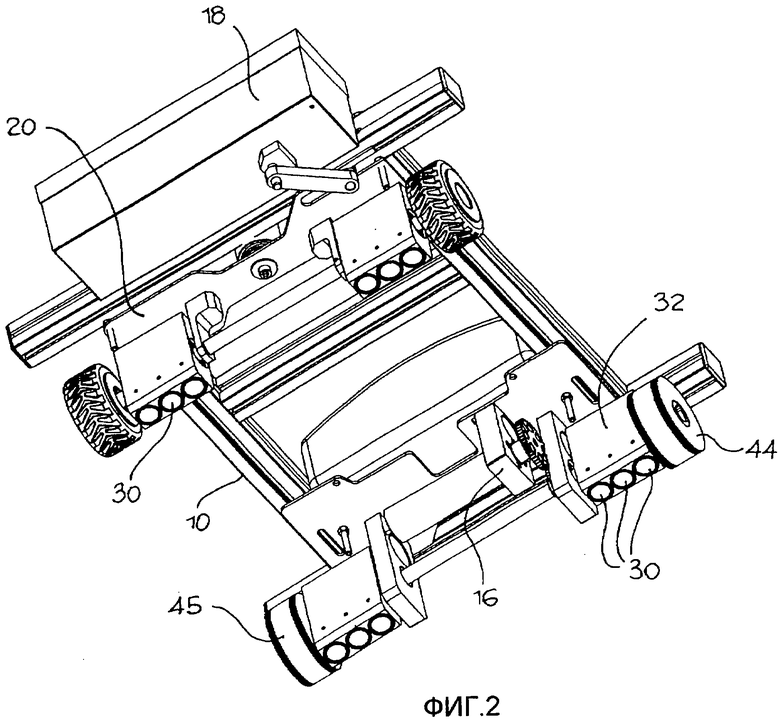
1. Робот, содержащий раму (10; 100), оснащенную колесами (12; 14; 107) для перемещения по опорной поверхности с высокой магнитной проницаемостью и по меньшей мере одним постоянным магнитом (30; 106; 152), способным магнитно взаимодействовать с указанной поверхностью для сцепления робота с поверхностью, отличающийся тем, что указанный постоянный магнит (30; 106; 152) установлен таким образом, чтобы скользить вдоль опорной поверхности, при этом указанный по меньшей мере один магнит (30; 106; 152) размещен в опоре (32; 114; 150), способной свободно качаться, таким образом, что полюс магнита всегда находится в положении минимального расстояния от опорной поверхности, где каждая опора (32; 114; 154) посажена таким образом, чтобы качаться на вращающемся валу колес.
2. Робот по п.1, в котором указанный по меньшей мере один постоянный магнит (30; 106; 152) расположен и удерживается на заданном расстоянии от опорной поверхности.
3. Робот по п.1 или 2, в котором указанный по меньшей мере один постоянный магнит (30; 106; 152) расположен рядом с каждым колесом (12; 14; 107).
4. Робот по п.3, в котором рядом с каждым колесом посажена опора для размещения множества постоянных магнитов (30).
5. Робот по п.4, в котором указанные постоянные магниты имеют форму дисков или пластинок с плоскими поверхностями, параллельными относительно опорной поверхности.
6. Робот по п.4, в котором близко к каждому колесу посажена опора (114; 154) для размещения параллелепипедального или имеющего форму прутка магнита, установленного горизонтально.
7. Робот по п.1, в котором рама (10; 100) оснащена двумя парами колес, посаженными на соответствующие параллельные валы, при этом рядом с каждым колесом качающаяся опора (32; 114) установлена на валу.
8. Робот по п.1, в котором каждая опора (114; 150) находится в контакте с опорной поверхностью, подлежащей контролю, посредством по меньшей мере одного ролика.
9. Робот по п.1, в котором рама (100) содержит продольную ось (101), соединяющую две поперечные оси (102), обеспечивающие возможность роботу перемещаться по поверхности, подлежащей контролю, при этом указанная продольная ось (101) оснащена шарнирным соединением (104), обеспечивающим возможность независимого поворачивания двух поперечных осей (102) относительно продольной оси.
10. Робот по п.1, в котором каждый вращающийся вал имеет возможность свободно наклоняться относительно колес и качающихся опор для магнита.
11. Робот по п.10, в котором каждая качающаяся опора (114) из пары качающихся опор на одной и той же поперечной оси оснащена шарикоподшипником (112), поддерживающимся фланцем (110), проходящим от соответствующего колеса, при этом указанный фланец имеет проходящее сквозь него осевое гнездо (120) для вращающегося вала, при этом указанное гнездо имеет коническую форму для обеспечения возможности качания вала относительно оси фланца.
12. Робот по п.11, в котором качающаяся опора (114) имеет имеющее форму паза отверстие (122) для качания вращающегося вала относительно опоры.
13. Робот по п.11 или 12, в котором каждое колесо имеет осевое гнездо, в которое вставлен один конец (108') вращающегося вала, при этом указанный конец имеет округленную внешнюю поверхность для того, чтобы качаться внутри гнезда колеса.
| US 3922991 А, 02.12.1975 | |||
| JP 2001151170 А, 05.06.2001 | |||
| DE 20210484 U1, 12.09.2002 | |||
| JP 61200070 А, 04.09.1986 | |||
| СПОСОБ ПОЛУЧЕНИЯ ПЛАЗМОННОЙ ПЛЕНОЧНОЙ СТРУКТУРЫ ИЗ АДДИТИВНЫХ ПОРОШКОВ НА ОСНОВЕ АЛЮМИНИЯ | 2017 |
|
RU2689479C1 |
| ГРУППОВОЙ СПОСОБ АБИ (ABBYY) ВЕРИФИКАЦИИ КОМПЬЮТЕРНЫХ КОДОВ С СООТВЕТСТВУЮЩИМИ ИМ ОРИГИНАЛАМИ | 1998 |
|
RU2145115C1 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ДВИЖЕНИЯ ВНУТРИ ТРУБОПРОВОДА | 1987 |
|
SU1494416A1 |
| US 5536199 А, 16.07.1996 | |||
| JP 9281273 А, 31.10.1997. | |||

