Изобретение относится к диагностирующему оборудованию, в частности к робототехническим устройствам для мониторинга технического состояния металлоконструкций и трубопроводов и лазерного сканирования в целях градуировки и измерения толщины.
Известен мобильный робот магнитного взаимодействия (патент РФ №2481997 от 29.09.2008), который содержит раму, оснащенную колесами для перемещения по опорной поверхности с высокой магнитной проницаемостью и одним постоянным магнитом, способным магнитно взаимодействовать с указанной поверхностью для сцепления устройства с поверхностью. Магнит установлен таким образом, чтобы скользить вдоль опорной поверхности. Магнит размещен в опоре, способной свободно качаться, таким образом, что полюс магнита всегда находится в положении минимального расстояния от опорной поверхности, где каждая опора посажена таким образом, чтобы качаться на вращающемся валу колес. Достигается возможность свободного движения со скольжением по поверхности, подлежащей контролю.
Недостатком данного устройства является то, что магниты закреплены статично относительно опорной поверхности колес из-за чего устройство способно перемещаться только по конструкциям с прямолинейными ферромагнитными поверхностями. При преодолении препятствий из неметаллического материала притяжение к поверхности многократно уменьшится, и устройства окажутся в неустойчивом состоянии.
Известен сканирующий дефектоскоп (патент РФ №142323, опубл. 27.06.2014), включающий укрепленные на раме шасси датчик средств неразрушающего контроля с намагничивающей системой и излучающим и приемным первичными электромагнитно-акустическими преобразователями и электронный блок с предусилителем, источник питания, видеоконтрольное устройство, генератор зондирующих импульсов и АЦП, отличающийся тем, что намагничивающая система выполнена в виде сердечника в форме параллелепипеда из магнитомягкой стали, на каждой нерабочей поверхности которого установлен высокоэнергетичный магнит так, чтобы одноименные полюса магнитов были направлены внутрь сердечника, а на рабочей поверхности укреплены излучающий и приемный первичные электромагнитно-акустические преобразователи, при этом генератор зондирующих импульсов, видеоконтрольное устройство источник питания и АЦП размещены в электронном блоке и рама шасси установлена на двух мотор-колесах на расстоянии 10-20 мм от опорной поверхности этих колес.
Недостатком данного устройства является то, что магниты закреплены статично относительно опорной поверхности колес из-за чего устройство способно перемещаться только по конструкциям с прямолинейными ферромагнитными поверхностями. При преодолении препятствий из неметаллического материала притяжение к поверхности многократно уменьшится, и устройства окажутся в неустойчивом состоянии.
Известен мобильный робот с магнитными движителями (патент РФ №2585396, опубл. 27.05.2016) для движения по вертикальным и горизонтальным поверхностям, содержащий корпус с установленным на нем по меньшей мере одним колесом и приводной узел, установленный на корпусе для приведения в движение колес, представляющий собой электродвигатель с механическими передачами и приводными валами. Колесо содержит внешний барабан, имеющий кольцевую периферийную стенку, и внутренний элемент колеса, включающий в себя фрагмент из магнитно-проницаемого материала и магнит, находящийся в контакте с магнитно-проницаемым материалом. Внутренний элемент колеса имеет внешний диаметр меньший, чем внутренний диаметр внешнего барабана. Внутренний элемент колеса имеет форму диска с вырезами. Постоянный магнит и фрагмент магнитно-проницаемого материала выполнены в форме полуколец с вырезами, закрепленных на приводном валу так, что при нахождении магнита на максимальном удалении от точки контакта колеса с рабочей поверхностью большая часть линий магнитного поля проходит не через рабочую поверхность, а через магнитно-проницаемый материал внутреннего элемента колеса
Недостатком данного устройства является то, что подключение к пульту управления осуществляется через кабель. Это сильно уменьшает дальность использования и осложняет перемещение робота по труднодоступным участкам металлоконструкций. Также недостатком является использование только видеокамеры, что не позволяет определить точное местоположение визуального нарушения.
Известен магнитный дефектоскоп для обнаружения поверхностных дефектов трубопроводов (патент РФ №119885, опубл. 27.08.2012), содержащий четырехколесное шасси с несущей рамой, снабженное электроприводом из шаговых электродвигателей, которые кинематически связанны с колесами, а электрически - через блок управления шаговыми двигателями с источником питания, закрепленные на раме магнитную систему, строчный преобразователь магнитного поля, управляющий электронный блок и видеоконтрольное устройство. Магнитная система выполнена в виде двух постоянных магнитов с зазором 10-20 мм между ними и укрепленных на расстоянии 10-20 мм от опорной поверхности колес, при этом постоянные магниты укреплены так, что направление их намагниченности перпендикулярно опорной поверхности колес.
Недостатком данного устройства является то, что устройство перемещается при помощи четырехколесного шасси с несущей рамой, из-за этого колёса находятся в жестко закреплённом положении и устройство может перемещаться только по прямолинейным поверхностям и не может преодолевать препятствия. Также в устройстве используются обыкновенные колеса, что позволяет перемещаться только по горизонтальным поверхностям.
Известен роботизированный дефектоскоп для неразрушающего контроля трубопроводов (патент РФ № 197520, опубл. 12.05.2020) принятый за прототип, содержащий в себе средство доставки, на котором установлены электронный блок, датчик для ультразвуковой диагностики поверхности объекта контроля, отличающийся тем, что датчик для ультразвуковой диагностики выполнен в виде цифровой фазированной антенной решетки на электромагнитно-акустических преобразователях, имеет в составе датчик зазора для определения величины рабочего зазора, на роботизированном дефектоскопе установлен привод подъема датчика ультразвуковой диагностики для регулирования величины рабочего зазора и загрузки дефектоскопа через технологические люки трубопровода без повреждения датчика ультразвуковой диагностики.
Недостатком данного устройства является то, что колёса устройства закреплены перпендикулярно нижней части корпуса, из-за чего устройство может перемещаться только по прямолинейным поверхностям и не может преодолевать препятствия. Также в устройстве используются обыкновенные колеса, что позволяет перемещаться только по горизонтальным поверхностям.
Техническим результатом является создание малогабаритного устройства для повышения точности технического мониторинга металлоконструкций и трубопроводов, способного преодолевать различные препятствия.
Технический результат достигается тем, что корпус устройства выполнен в форме параллелепипеда со срезанными в задней части углами, на верхней, нижней и боковых стенках корпуса выполнены отверстия в форме прямоугольников, верхняя часть корпуса выполнена в форме крышки, которая крепится к корпусу с возможностью съема, на задней части корпуса выполнены отверстия прямоугольной формы, в которые установлены крышка аккумулятора и ниже крышка электронного блока, в центре передней части корпуса выполнено отверстие в форме круга, в которое установлен объектив LIDAR с встроенной видеокамерой, а по бокам от него выполнены отверстия меньшего диаметра, в которые установлены светодиоды, в центре нижней части установлен активный электромагнитно-акустический преобразователь, а по углам подвижные крепления, которые жестко соединены с приводом, и состоят из основного крепления, к которому крепится заглушка колеса и крышка для сервопривода, опорные колеса с неодимовыми магнитами, которые соединены с сервоприводами, которые установлены внутри корпуса, электронный блок включает в себя узел обработки и синтеза сигналов, выход которого соединен с входами накопителя и узла беспроводной связи, выход которого соединен с входом узла навигации, а вход узла обработки и синтеза сигналов электронного блока соединен с выходами LIDAR с встроенной видеокамерой, активный электромагнитно-акустический преобразователь, выходы сервопривода, активный электромагнитно-акустический преобразователь, LIDAR c встроенной видеокамерой, светодиодов и электронного блока соединены с входами аккумулятора.
Устройство поясняется следующими фигурами:
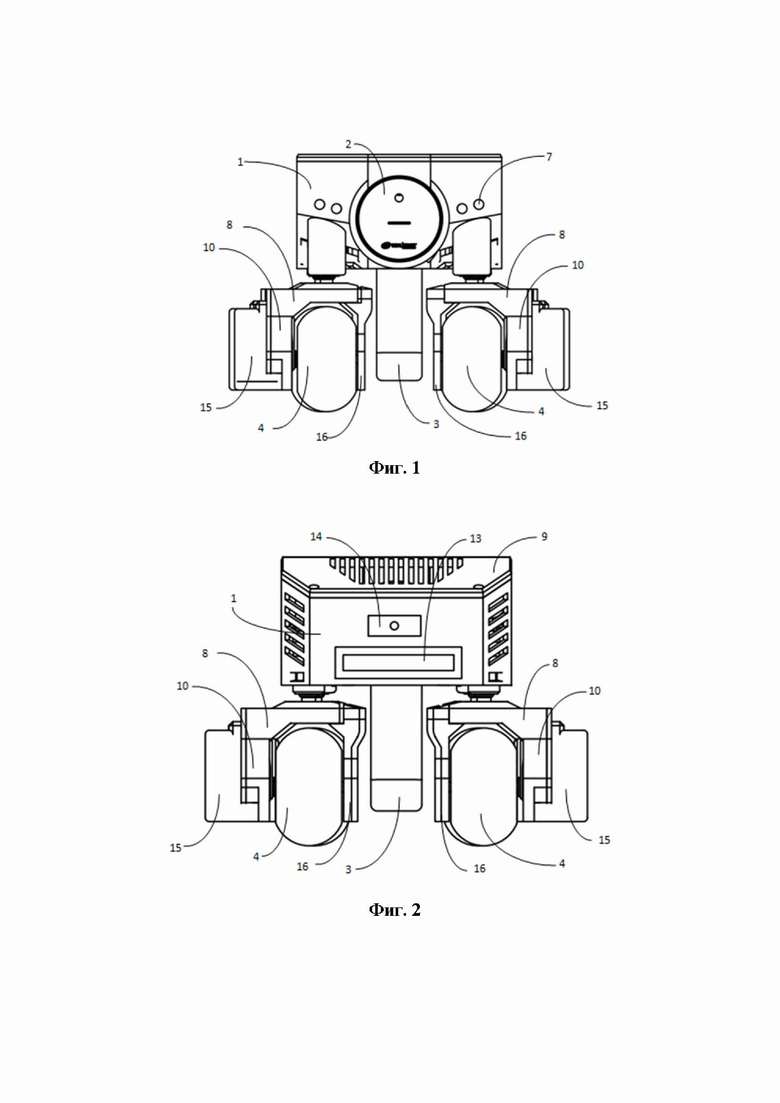
фиг. 1 – вид спереди;
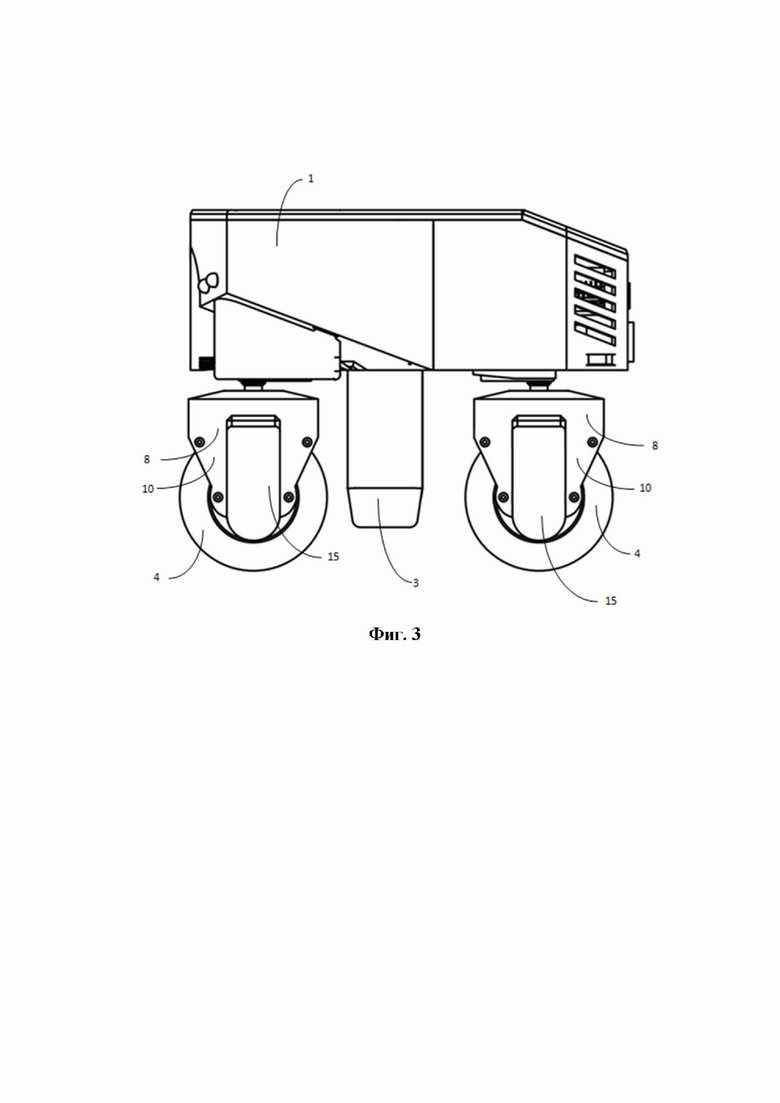
фиг. 2 – вид сзади;
фиг. 3 – вид с боку;
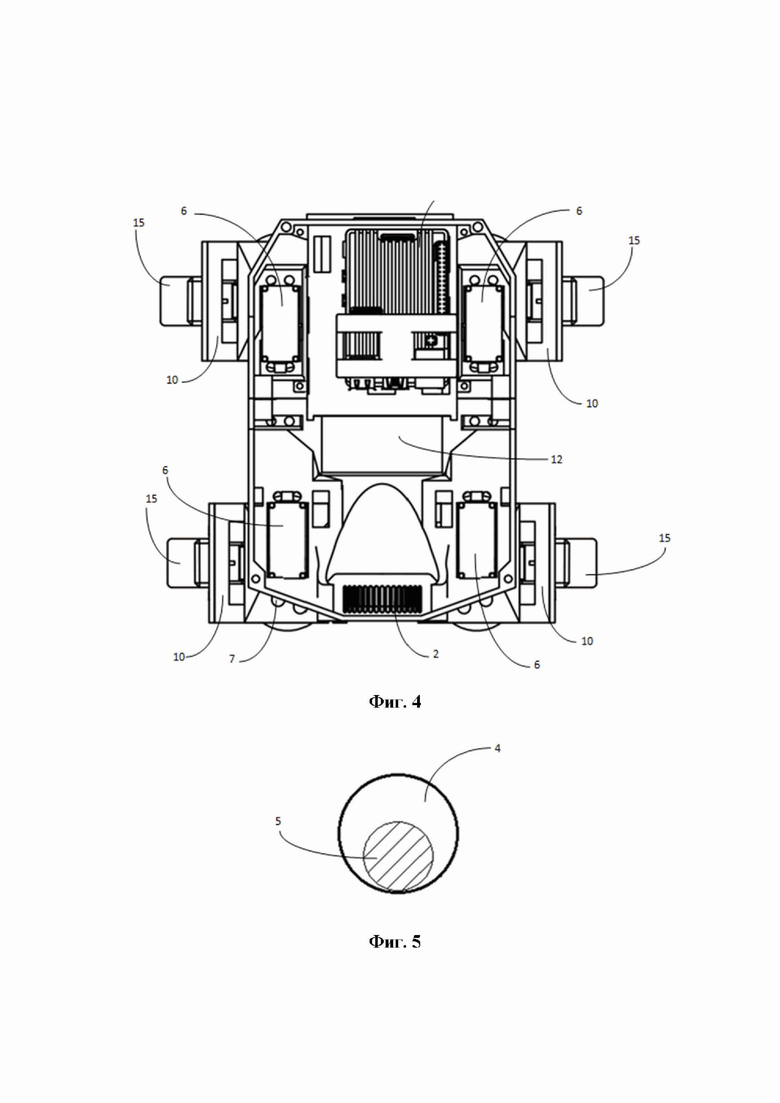
фиг. 4 – вид сверху;
фиг. 5 – колесо с неодимовым магнитом;
1 – корпус;
2 – LIDAR с встроенной видеокамерой;
3 – активный электромагнитно-акустический преобразователь (ЭМАП);
4 – колёса;
5 – неодимовые магниты;
6 – сервоприводы для вращения крепления;
7 – светодиоды;
8 – основное крепление;
9 – крышка;
10 – подвижные крепления;
11 – электронный блок;
12 – аккумулятор;
13 – крышка аккумулятора;
14 – крышка электронного блока;
15 – крышка сервопривода;
16 – заглушка колеса.
Устройство для мониторинга и лазерного сканирования металлоконструкций и трубопроводов состоит из корпуса 1, выполненного в форме параллелепипеда со срезанными в задней части углами. На верхней, нижней и боковых стенках корпуса 1 выполнены отверстия в форме прямоугольников. Верхняя часть корпуса выполнена в форме крышки 9, которая крепится к корпусу с возможностью съема. На задней части корпуса выполнены отверстия прямоугольной формы, в которые установлены крышка аккумулятора 13 и ниже крышка электронного блока 14. В центре передней части корпуса 1 выполнено отверстие в форме круга, в которое установлен объектив LIDAR с встроенной видеокамерой 2, а по бокам от него выполнены отверстия меньшего диаметра, в которые установлены светодиоды 7. В центре нижней части корпуса 1 установлен ЭМАП 3, а по углам установлены подвижные крепления 10 колес 4. Подвижные крепления 10 жестко соединены с приводом 6. Подвижные крепления 10 состоят из основного крепления 8, к которому крепится заглушка 16 колеса 4 и крышка 15 для сервопривода (на фигуре не показан). В подвижные крепления 10 установлены опорные колеса 4 с неодимовыми магнитами 5, которые соединены с сервоприводами (на фигуре не показаны). Внутри корпуса 1 установлены сервоприводы 6, которые соединены с подвижным креплением 10.
Внутри корпуса 1 установлен LIDAR с встроенной видеокамерой 2, его выход соединен с входом узла обработки и синтеза сигналов электронного блока 11. Также вход узла обработки и синтеза сигналов электронного блока 11 соединен с выходом ЭМАП 3. Электронный блок 11 включает в себя узел обработки и синтеза сигналов, узел навигации, узел беспроводной связи и накопитель информации. Выход узла обработки и синтеза сигналов соединен с входами накопителя и узла беспроводной связи. Выход узла беспроводной связи соединен с входом узла навигации. Светодиоды 7 установлены внутри корпуса 1 и совпадают с отверстиями в передней части корпуса 1.
Выходы сервопривода для вращения колес (на фигуре не показан), ЭМАП 3, LIDAR c встроенной видеокамерой 2, светодиодов и электронного блока 11 соединены с входами аккумулятора 12.
Мониторинг осуществляется следующим образом. Устройство устанавливают на поверхность металлоконструкции или трубопровода. Сервопривод 6, установленный в корпусе 1 устройства, приводит в движение отвечающее за поворот устройства подвижное крепление 10, на котором установлен сервопривод (на фигуре не показан), отвечающий за вращение колеса 4. Неодимовые магниты 5, установленные внутрь колёс 4, обеспечивают устойчивое положение робота при перемещении по криволинейным поверхностям, в том числе вертикальным, и преодолении разнообразных препятствий. В процессе движения видеофиксация с интеллектуальным распознаванием дефектов осуществляется оптической системой LIDAR с встроенной фронтальной видеокамерой 2, а в слабоосвещенных участках – с применением светодиодов 7. В заранее указанных для проверки точках ЭМАП 3 измеряет толщину металлических объектов, производит поиск расслоений и других дефектов без предварительной зачистки контролируемой поверхности. Информация о текущей ситуации обрабатывается с помощью узла обработки и синтеза сигналов современного электронного блока 11 и передается через узел беспроводной связи оператору, управляющему устройством с помощью узла навигации, а также сохраняется на накопителе, который может быть быстро извлечен путем снятия крышки электронного блока 14. При необходимости можно заменить аккумулятор, сняв крышку аккумулятора 13.
Участки с визуальными или физическими нарушениями свидетельствуют о наличии повреждений металлоконструкции.
Данное робототехническое устройство позволяет осуществлять лазерное сканирование в целях градуировки и измерения толщины металлических стенок ёмкостей и трубопроводов даже в местах со сложной пространственной конфигурацией, встроенная в LIDAR фронтальная камера позволяет фиксировать поврежденные участки конструкции. Устройство работает автономно и не требует непрерывное соединение с внешним источником энергии, имеет высокую скорость прохождения благодаря малому весу и наличию у каждого колеса отдельного сервопривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматизированного ультразвукового контроля сварных соединений стенки резервуаров | 2019 |
|
RU2731165C1 |
| ЭЛЕКТРОМАГНИТНЫЙ АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СИСТЕМА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2009 |
|
RU2489713C2 |
| Измерительный модуль дефектоскопа и его следящее шасси | 2022 |
|
RU2778492C1 |
| ТЯГОВАЯ СИСТЕМА ЭЛЕКТРОМОБИЛЯ | 2018 |
|
RU2696752C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2295125C1 |
| Установка для дефектоскопического сканирования | 2022 |
|
RU2782309C1 |
| Способ сканирования объекта инспекции по площади и установка для его осуществления | 2022 |
|
RU2782504C1 |
| Устройство для отделения наноспутников с заданными параметрами от сегмента МКС | 2016 |
|
RU2653666C2 |
| СПОСОБ ЗАПУСКА МИКРО- И НАНОСПУТНИКОВ И УСТРОЙСТВО НА ОСНОВЕ МИКРОПРОЦЕССОРНОЙ МАГНИТОИНДУКЦИОННОЙ СИСТЕМЫ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЗАПУСКА | 2015 |
|
RU2603441C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
Использование: для мониторинга технического состояния металлоконструкций и трубопроводов. Сущность изобретения заключается в том, что устройство для мониторинга технического состояния металлоконструкций и трубопроводов содержит электронный блок, датчик для ультразвуковой диагностики объекта контроля, при этом корпус устройства выполнен в форме параллелепипеда со срезанными в задней части углами, на верхней, нижней и боковых стенках корпуса выполнены отверстия в форме прямоугольников, верхняя часть корпуса выполнена в форме крышки, которая крепится к корпусу с возможностью съема, на задней части корпуса выполнены отверстия прямоугольной формы, в которые установлены крышка аккумулятора и ниже крышка электронного блока, в центре передней части корпуса выполнено отверстие в форме круга, в которое установлен объектив LIDAR с встроенной видеокамерой, а по бокам от него выполнены отверстия меньшего диаметра, в которые установлены светодиоды, в центре нижней части установлен активный электромагнитно-акустический преобразователь, а по углам подвижные крепления, которые жестко соединены с приводом, и состоят из основного крепления, к которому крепится заглушка колеса и крышка для сервопривода, опорные колеса с неодимовыми магнитами, которые соединены с сервоприводами, которые установлены внутри корпуса, электронный блок включает в себя узел обработки и синтеза сигналов, выход которого соединен с входами накопителя и узла беспроводной связи, выход которого соединен с входом узла навигации, а вход узла обработки и синтеза сигналов электронного блока соединен с выходами LIDAR с встроенной видеокамерой, активный электромагнитно-акустический преобразователь, выходы сервопривода, активный электромагнитно-акустический преобразователь, LIDAR c встроенной видеокамерой, светодиодов и электронного блока соединены с входами аккумулятора. Технический результат: обеспечение возможности создания малогабаритного устройства для технического мониторинга металлоконструкций и трубопроводов, способного преодолевать различные препятствия. 5 ил.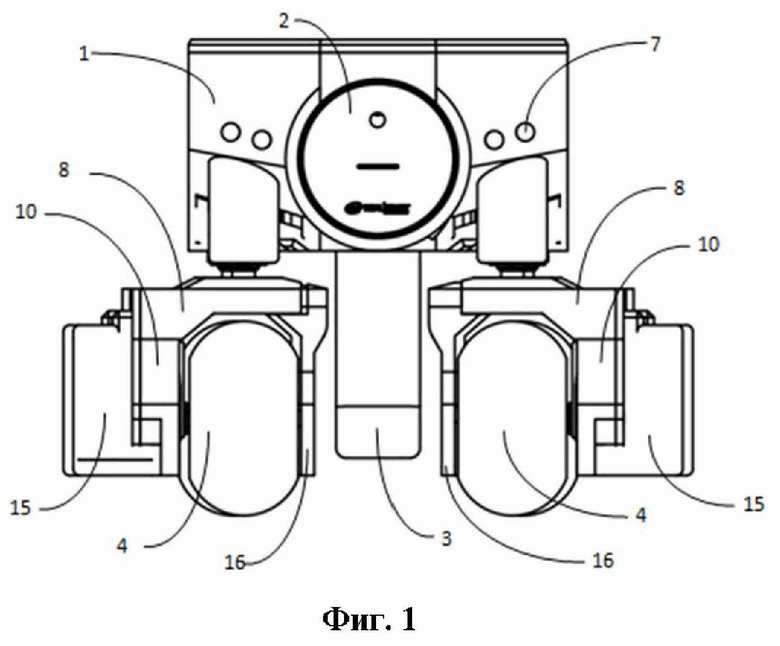
Устройство для мониторинга технического состояния металлоконструкций и трубопроводов, содержащее электронный блок, датчик для ультразвуковой диагностики объекта контроля, отличающееся тем, что корпус устройства выполнен в форме параллелепипеда со срезанными в задней части углами, на верхней, нижней и боковых стенках корпуса выполнены отверстия в форме прямоугольников, верхняя часть корпуса выполнена в форме крышки, которая крепится к корпусу с возможностью съема, на задней части корпуса выполнены отверстия прямоугольной формы, в которые установлены крышка аккумулятора и ниже крышка электронного блока, в центре передней части корпуса выполнено отверстие в форме круга, в которое установлен объектив LIDAR с встроенной видеокамерой, а по бокам от него выполнены отверстия меньшего диаметра, в которые установлены светодиоды, в центре нижней части установлен активный электромагнитно-акустический преобразователь, а по углам подвижные крепления, которые жестко соединены с приводом, и состоят из основного крепления, к которому крепится заглушка колеса и крышка для сервопривода, опорные колеса с неодимовыми магнитами, которые соединены с сервоприводами, которые установлены внутри корпуса, электронный блок включает в себя узел обработки и синтеза сигналов, выход которого соединен с входами накопителя и узла беспроводной связи, выход которого соединен с входом узла навигации, а вход узла обработки и синтеза сигналов электронного блока соединен с выходами LIDAR с встроенной видеокамерой, активный электромагнитно-акустический преобразователь, выходы сервопривода, активный электромагнитно-акустический преобразователь, LIDAR c встроенной видеокамерой, светодиодов и электронного блока соединены с входами аккумулятора.
| СПОСОБ ПРОВЕДЕНИЯ ГЕТЕРОГЕННО-КАТАЛИТИЧЕСКИХРЕАКЦИЙ | 0 |
|
SU197520A1 |
| US 2012103097 A1, 03.05.2012 | |||
| RU 2013156530 A, 20.07.2015 | |||
| US 2012069172 A1, 22.03.2012 | |||
| УСТРОЙСТВО ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ СТЕНОК ФЕРРОМАГНИТНЫХ КОНСТРУКТИВНЫХ ЭЛЕМЕНТОВ | 2005 |
|
RU2413214C2 |
| US 2010008462 A1, 14.01.2010. | |||

