ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к гашениям колебаний различных колебательных систем. Наиболее успешно настоящее изобретение может быть использовано в подвеске наземных транспортных средств. Также оно может быть использовано для гашения колебаний любых механических и электромагнитных колебательных систем.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Колебательная система, независимо от физической природы, содержит, по меньшей мере, один первый элемент, который обладает инерционным свойством, по меньшей мере, один второй элемент, который, изменяя свое состояние под действием внешней, по отношению к этому элементу, силы, запасает потенциальную энергию и вследствие этого создает потенциальную силу, действующую на связанные с этим элементом другие элементы колебательной системы, и, по меньшей мере, один третий элемент, который в процессе циркуляции энергии между упомянутыми первым и вторым элементами создает силу сопротивления, препятствующую этой циркуляции, и выводит энергию из колебательной системы путем ее расходования на совершение работы вне колебательной системы.
Во многих случаях использования колебательных систем существует необходимость минимизации силы, действующей на упомянутый первый элемент при воздействии на колебательную систему внешних возмущений различной частоты, амплитуды и формы. Одним из наиболее актуальных случаев необходимости решения такой задачи является подвеска транспортного средства.
Подвеска транспортного средства является механической колебательной системой, которая содержит:
- упомянутый первый элемент, которым является подрессоренная масса транспортного средства;
- неподрессоренную массу транспортного средства, через которую транспортное средство опирается на опорную поверхность (дорогу) и через которую внешние возмущения (изменения профиля опорной поверхности) передаются на подвеску;
- упомянутый второй элемент, которым является упругий элемент подвески и который под действием внешней, по отношению к нему, силы изменяет свой прогиб и создает силу упругости, которая действует на связанные с этим элементом подрессоренную и неподрессоренную массы транспортного средства;
- упомянутый третий элемент, которым является демпфер и который во время изменения прогиба упомянутого второго элемента осуществляет вывод циркулирующей в подвеске механической энергии и создает силу сопротивления, модуль которой имеет прямую зависимость от модуля скорости изменения прогиба упомянутого второго элемента и которая замедляет изменение этого прогиба.
Подвеска транспортного средства предназначена для уменьшения действующей на подрессоренную массу силы, а также для уменьшения колебаний силы, прижимающей неподрессоренную массу к опорной поверхности при изменении профиля опорной поверхности.
Наибольшие значения силы, действующей на подрессоренную массу, и колебаний силы, прижимающей неподрессоренную массу к опорной поверхности, возникают при резонансных колебаниях подвески.
Для уменьшения силы, действующей на подрессоренную массу, и колебаний силы, прижимающей неподрессоренную массу к опорной поверхности, осуществляют гашение колебаний подвески путем диссипации механической энергии, циркулирующей в подвеске.
Для полного предотвращения резонансных явлений необходимо устанавливать угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, который соответствует апериодическому затуханию возмущений подвески. Однако при таком угле наклона зависимости модуля силы сопротивления от модуля скорости изменения прогиба возникают следующие негативные явления:
- на неподрессоренную и подрессоренную массы действует со стороны подвески чрезмерно большая результирующая сила во время сжатия подвески под действием изменений профиля опорной поверхности, скорость которых превышает скорость, характерную для резонанса подвески;
- чрезмерно уменьшается результирующая сила, прижимающая неподрессоренную массу к опорной поверхности (вплоть до потери контакта неподрессоренной массы с опорной поверхностью), во время растяжения подвески под действием изменений профиля опорной поверхности, скорость которых превышает скорость, характерную для резонанса подвески.
Для уменьшения этих негативных явлений необходимо устанавливать угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, который соответствует колебательному затуханию возмущений подвески. При этом чем меньше (больше) угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тем в большей (меньшей) степени уменьшаются негативные явления, характерные для апериодического затухания, но увеличиваются резонансные явления.
Общеизвестен и широко используется способ гашения колебаний подвески транспортного средства, при котором
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, который соответствует колебательному затуханию возмущений подвески,
уменьшают (увеличивают) угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, если текущий модуль упомянутой силы сопротивления больше (меньше) заданного значения.
Скорость изменения прогиба подвески зависит от частоты, от амплитуды и от фазы колебаний. Вследствие этого упомянутое заданное значение соответствует бесконечно большому количеству вариантов сочетаний различных фаз, амплитуд и частот колебаний. По этой причине общеизвестный способ не позволяет минимизировать силу, действующую на подрессоренную массу, и колебания силы, прижимающей неподрессоренную массу к опорной поверхности при воздействии на транспортное средство изменений профиля опорной поверхности различной частоты, амплитуды и формы.
Общеизвестный способ гашения колебаний подвески упомянут в книге «Подвеска автомобиля. Колебания и плавность хода» (глава 3 «Колебательные параметры автомобиля и его подвески», параграф 14 «Трение в подвеске. Амортизаторы»), автор Р.В.Ротенберг, издание третье, издательство «Машиностроение», г.Москва, 1972 год, патентах RU 2286491 С2 и RU 2120389 С1 и заявке DE 4139746 А1.
Наиболее близким аналогом предлагаемого изобретения является способ гашения колебаний подвески транспортного средства, известный из патента RU 2127675 C1 (пункт 8 формулы изобретения) и международной заявки на изобретение WO 02/101262 А1, опубликованной 19 декабря 2002 года в бюллетене WIPO, при котором, как и в общеизвестном способе,
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, который соответствует колебательному затуханию возмущений подвески,
уменьшают (увеличивают) угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, если текущий модуль упомянутой силы сопротивления больше (меньше) заданного значения.
В отличие от общеизвестного способа в способе, известном из патента RU 2127675 С1 и международной заявки на изобретение WO 02/101262 А1
изменяют упомянутое заданное значение в зависимости от текущего прогиба упомянутого упругого элемента, по меньшей мере, на части хода упомянутой подвески.
Способ, известный из патента RU 2127675 С1 и международной заявки на изобретение WO 02/101262 А1, не устанавливает какую-либо закономерность изменения упомянутого заданного значения в зависимости от текущего прогиба упомянутого упругого элемента. По этой причине этот способ не обеспечивает безусловную минимизацию результирующей силы, действующей на подрессоренную массу, и колебаний силы, прижимающей неподрессоренную массу к опорной поверхности, при воздействии на транспортное средство изменений профиля опорной поверхности различной частоты, амплитуды и формы.
Другим случаем решения задачи минимизации силы, действующей на упомянутый первый элемент колебательной системы, является минимизация колебаний падения напряжения на индуктивности электромагнитного колебательного контура при воздействии на этот контур внешней электродвижущей силы различной частоты, амплитуды и формы.
Механическая и электромагнитная колебательные системы имеют одинаковые закономерности развития колебательного процесса, которые описываются одинаковыми, с математической точки зрения, уравнениями. Поэтому способ, известный из патента RU 2127675 С1 и международной заявки на изобретение WO 02/101262 А1, может быть использован и для гашения колебаний электромагнитной колебательной системы, которая представляет собой электромагнитный колебательный контур, который содержит:
- упомянутый первый элемент, которым является индуктивность;
- упомянутый второй элемент, которым является электрическая емкость, которая под действием приложенной к ней разности электрических потенциалов изменяет свой электрический заряд и создает разность электрических потенциалов, которая действует на связанные с ней другие элементы контура;
- упомянутый третий элемент, которым является электрическое сопротивление, которое во время изменения электрического заряда упомянутого второго элемента осуществляет вывод циркулирующей в контуре электромагнитной энергии и создает разность электрических потенциалов, которая является силой сопротивления, модуль которой имеет прямую зависимость от модуля скорости изменения электрического заряда упомянутого второго элемента и которая замедляет изменение этого заряда.
В случае гашения колебаний электромагнитного контура способ, известный из патента RU 2127675 С1 и международной заявки на изобретение WO 02/101262 А1, заключается в том, что
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения электрического заряда, который соответствует колебательному затуханию возмущений контура,
уменьшают (увеличивают) угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения электрического заряда, если текущий модуль упомянутой силы сопротивления больше (меньше) заданного значения,
изменяют упомянутое заданное значение в зависимости от текущего электрического заряда упомянутой электрической емкости, по меньшей мере, на части максимального интервала изменения величины ее электрического заряда.
При этом сохраняются те же недостатки, которые присущи использованию этого способа для гашения колебаний механической колебательной системы.
Вследствие идентичности развития колебаний механической и электромагнитной колебательных систем способ, известный из патента RU 2127675 С1 и международной заявки на изобретение WO 02/101262 А1, может быть выражен в обобщенной форме как способ гашения колебаний колебательной системы, содержащей, по меньшей мере, один первый элемент, который обладает инерционным свойством, по меньшей мере, один второй элемент, который, изменяя свое состояние под действием внешней, по отношению к этому элементу, силы, запасает потенциальную энергию и вследствие этого создает потенциальную силу, действующую на связанные с этим элементом другие элементы колебательной системы, и, по меньшей мере, один третий элемент, который в процессе циркуляции энергии между упомянутыми первым и вторым элементами выводит энергию из колебательной системы путем ее расходования на совершение работы вне колебательной системы и создает силу сопротивления, модуль которой имеет прямую зависимость от модуля скорости изменения состояния упомянутого второго элемента и которая замедляет это изменение, при котором
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, который соответствует колебательному затуханию возмущений колебательной системы,
уменьшают (увеличивают) угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, если текущий модуль упомянутой силы сопротивления больше (меньше) заданного значения,
изменяют упомянутое заданное значение в зависимости от текущего состояния упомянутого второго элемента, по меньшей мере, на части максимального интервала изменения значений его состояния.
Для случая гашения механических колебаний способ, известный из патента RU 2127675 С1 и международной заявки на изобретение WO 02/101262 А1, может быть осуществлен посредством использования в качестве упомянутого третьего элемента механической колебательной системы, осуществляющего вывод циркулирующей в ней механической энергии, устройства, известного из международной заявки на изобретение WO 02/101262 А1. Это устройство представляет собой гидравлический телескопический демпфер, который содержит:
рабочий цилиндр, внутренняя полость которого заполнена жидкостью,
шток, который предназначен для восприятия внешней нагрузки и установлен соосно с упомянутым рабочим цилиндром с возможностью поступательного (возвратного) движения в упомянутом рабочем цилиндре при сжатии (растяжении) демпфера,
внутреннюю полость упомянутого штока, которая сообщается с внутренней полостью упомянутого рабочего цилиндра,
поршень, который закреплен на конце упомянутого штока и делит внутреннюю полость упомянутого рабочего цилиндра на камеру сжатия, объем которой уменьшается при сжатии демпфера, и на камеру растяжения, объем которой уменьшается при растяжении демпфера,
клапан сжатия, который имеет, по меньшей мере, один подводящий канал, который выполнен в упомянутом поршне и имеет входное отверстие со стороны упомянутой камеры сжатия, а выходное отверстие со стороны упомянутой камеры растяжения,
клапан растяжения, который имеет, по меньшей мере, один подводящий канал, который выполнен в упомянутом поршне и имеет входное отверстие со стороны упомянутой камеры растяжения, а выходное отверстие со стороны упомянутой камеры сжатия,
первый запорный элемент, который является частью упомянутого клапана сжатия, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия,
второй запорный элемент, который является частью упомянутого клапана растяжения, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения,
первый упругий элемент, сила упругости которого препятствует перемещению упомянутого первого запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия, и который является частью упомянутого клапана сжатия,
второй упругий элемент, сила упругости которого препятствует перемещению упомянутого второго запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения, и который является частью упомянутого клапана растяжения,
первую опору, которая взаимодействует с упомянутым первым упругим элементом, является частью упомянутого клапана сжатия и имеет часть внутренней поверхности, которая выполнена конусной,
первый направляющий элемент, вдоль которого упомянутая первая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого первого упругого элемента,
вторую опору, которая взаимодействует с упомянутым вторым упругим элементом, является частью упомянутого клапана растяжения и имеет часть внутренней поверхности, которая выполнена конусной,
второй направляющий элемент, вдоль которого упомянутая вторая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого второго упругого элемента,
стержень, который закреплен на дне упомянутой камеры сжатия, вдвигается в упомянутую внутреннюю полость упомянутого штока при сжатии демпфера, имеет четырехгранное переменное поперечное сечение на рабочем участке своей длины, которая равна максимальному ходу упомянутого штока,
первое отверстие, выполненное в упомянутом первом направляющем элементе со стороны первой боковой поверхности упомянутого стержня и ось которого перпендикулярна продольной оси этого стержня,
второе отверстие, выполненное в упомянутом первом направляющем элементе со стороны второй боковой поверхности упомянутого стержня, которая противоположна упомянутой первой боковой поверхности этого стержня, и ось которого перпендикулярна продольной оси этого стержня,
третье отверстие, выполненное в упомянутом втором направляющем элементе со стороны третьей боковой поверхности упомянутого стержня и ось которого перпендикулярна продольной оси этого стержня,
четвертое отверстие, выполненное в упомянутом втором направляющем элементе со стороны четвертой боковой поверхности упомянутого стержня, которая противоположна упомянутой третьей боковой поверхности этого стержня, и ось которого перпендикулярна продольной оси этого стержня,
первый упор цилиндрической формы, который установлен в упомянутом первом отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой первой боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой первой опоры,
второй упор, который идентичен упомянутому первому упору, установлен в упомянутом втором отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой второй боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой первой опоры,
третий упор цилиндрической формы, который установлен в упомянутом третьем отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой третьей боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой второй опоры,
четвертый упор, который идентичен упомянутому третьему упору, установлен в упомянутом четвертом отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой четвертой боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой второй опоры,
первый дроссель, который связывает упомянутую камеру сжатия с упомянутой камерой растяжения и который образован зазором между боковой поверхностью упомянутого первого упора и поверхностью упомянутого первого отверстия,
второй дроссель, который связывает упомянутую камеру сжатия с упомянутой камерой растяжения и который образован зазором между боковой поверхностью упомянутого второго упора и поверхностью упомянутого второго отверстия.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение решает задачу предотвращения резонанса в колебательной системе и минимизации результирующей силы, действующей на упомянутый первый элемент колебательной системы, который обладает инерционным свойством, при воздействии на колебательную систему внешних возмущений различной частоты, амплитуды и формы.
Следствием решения этой задачи для механической колебательной системы, представляющей собой подвеску транспортного средства, являются:
- минимизация колебаний силы, прижимающей неподрессоренную массу транспортного средства к опорной поверхности;
- повышение комфортабельности транспортного средства;
- улучшение управляемости и курсовой устойчивости транспортного средства;
- повышение тормозной и разгонной динамики транспортного средства;
- уменьшение среднего эксплуатационного расхода топлива и вредных выбросов;
- уменьшение динамической нагрузки на дорожное полотно и увеличение срока его службы;
- уменьшение динамической нагрузки на подрессоренную и неподрессоренную массы транспортного средства и увеличение срока их службы.
Предлагаемый способ, как и в наиболее близкий аналог, является способом гашения колебаний колебательной системы, содержащей, по меньшей мере, один первый элемент, который обладает инерционным свойством, по меньшей мере, один второй элемент, который, изменяя свое состояние под действием внешней, по отношению к этому элементу, силы, запасает потенциальную энергию и вследствие этого создает потенциальную силу, действующую на связанные с этим элементом другие элементы колебательной системы, и, по меньшей мере, один третий элемент, который в процессе циркуляции энергии между упомянутыми первым и вторым элементами выводит энергию из колебательной системы путем ее расходования на совершение работы вне колебательной системы и создает силу сопротивления, модуль которой имеет прямую зависимость от модуля скорости изменения состояния упомянутого второго элемента и которая замедляет это изменение, при котором
уменьшают (увеличивают) угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, если текущий модуль упомянутой силы сопротивления больше (меньше) заданного значения,
изменяют упомянутое заданное значение в зависимости от текущего состояния упомянутого второго элемента, по меньшей мере, на части максимального интервала изменения значений его состояния.
Предлагаемый способ отличается от наиболее близкого аналога тем, что:
во время уменьшения модуля отклонения текущего состояния упомянутого второго элемента от статического состояния устанавливают текущее упомянутое заданное значение, прямо пропорциональное приведенному к вектору упомянутой силы сопротивления модулю текущего отклонения упомянутой потенциальной силы упомянутого второго элемента от ее статической величины,
для достижения наибольшего технического эффекта от использования предлагаемого способа
во время уменьшения модуля отклонения текущего состояния упомянутого второго элемента от статического состояния устанавливают текущее упомянутое заданное значение, равное приведенному к вектору упомянутой силы сопротивления модулю текущего отклонения упомянутой потенциальной силы упомянутого второго элемента от ее статической величины,
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой колебательной системы, если текущий модуль упомянутой силы сопротивления равен или меньше текущего упомянутого заданного значения,
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой колебательной системы, если текущий модуль упомянутой силы сопротивления больше текущего упомянутого заданного значения,
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, соответствующий апериодическому затуханию возмущений упомянутой колебательной системы, максимально возможный для конструктивных и технологических ограничений устройства, которое реализует способ, если текущий модуль упомянутой силы сопротивления равен или меньше текущего упомянутого заданного значения,
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, соответствующий колебательному затуханию возмущений упомянутой колебательной системы, минимально возможный для конструктивных и технологических ограничений устройства, которое реализует способ, если текущий модуль упомянутой силы сопротивления больше текущего упомянутого заданного значения,
во время увеличения модуля отклонения текущего состояния упомянутого второго элемента от статического состояния устанавливают упомянутое заданное значение меньше 10% от приведенного к вектору упомянутой силы сопротивления модуля статической величины упомянутой потенциальной силы упомянутого второго элемента,
для увеличения амплитуды внешних возмущений, которые способна воспринять колебательная система,
изменяют текущее упомянутое заданное значение в прямой зависимости от модуля текущего отклонения упомянутой потенциальной силы упомянутого второго элемента от ее статической величины, по большей мере, на части максимального интервала значений отклонения состояния упомянутого второго элемента от статического состояния во время увеличения модуля этого отклонения.
Частным случаем предлагаемого способа является способ для гашения колебаний механической колебательной системы, представляющей собой подвеску транспортного средства, который отличается тем, что
осуществляют гашение колебаний механической колебательной системы, которая представляет собой подвеску транспортного средства, в которой:
- упомянутым первым элементом колебательной системы является подрессоренная масса транспортного средства;
- упомянутым вторым элементом колебательной системы является упругий элемент подвески, который связывает упомянутую подрессоренную массу транспортного средства с его неподрессоренной массой, через которую подвеска воспринимает внешние возмущения;
- упомянутым состоянием упомянутого второго элемента колебательной системы является прогиб упомянутого упругого элемента, а упомянутой потенциальной силой этого элемента является сила упругости упругого элемента;
- упомянутым третьим элементом колебательной системы является демпфер, который связывает упомянутые подрессоренную и неподрессоренную массы транспортного средства и который во время изменения прогиба упомянутого упругого элемента создает силу сопротивления, замедляющую изменение этого прогиба и модуль которой имеет прямую зависимость от модуля скорости изменения этого прогиба,
устанавливают и изменяют угол наклона упомянутой зависимости модуля силы сопротивления упомянутого демпфера от модуля скорости изменения упомянутого прогиба упомянутого упругого элемента,
устанавливают и изменяют упомянутое заданное значение в зависимости от текущего отклонения упомянутой силы упругости упомянутого упругого элемента от ее статической величины.
Частным случаем предлагаемого способа является способ для гашения колебаний электромагнитной колебательной системы, представляющей собой электромагнитный колебательный контур, который отличается тем, что
осуществляют гашение колебаний электромагнитной колебательной системы, которая представляет собой электромагнитный контур, в котором:
- упомянутым первым элементом колебательной системы является индуктивность контура;
- упомянутым вторым элементом колебательной системы является электрическая емкость контура;
- упомянутым состоянием упомянутого второго элемента колебательной системы является электрический заряд упомянутой электрической емкости, а упомянутой потенциальной силой этого элемента является разность электрических потенциалов на этой емкости;
- упомянутым третьим элементом колебательной системы является активное электрическое сопротивление контура, которое во время изменения электрического заряда упомянутой электрической емкости создает разность электрических потенциалов, которая представляет собой силу сопротивления, замедляющую изменение электрического заряда упомянутой электрической емкости и модуль которой имеет прямую зависимость от модуля скорости изменения этого заряда,
устанавливают и изменяют угол наклона упомянутой зависимости модуля силы сопротивления упомянутого активного электрического сопротивления от модуля скорости изменения электрического заряда упомянутой электрической емкости,
устанавливают и изменяют упомянутое заданное значение в зависимости от текущего отклонения разности электрических потенциалов на упомянутой электрической емкости от ее статической величины.
Предлагаемый способ для гашения колебаний механической колебательной системы, представляющей собой подвеску транспортного средства, может быть осуществлен посредством использования в качестве упомянутого третьего элемента колебательной системы какого-либо из двух вариантов устройства, которые описаны ниже.
Первый вариант устройства для осуществления предлагаемого способа, как и устройство, известное из международной заявки на изобретение WO 02/101262 А1, является устройством для гашения колебаний подвески транспортного средства, которая содержит, по меньшей мере, один упругий элемент, который создает силу упругости, действующую на связанные этим упругим элементом подрессоренную массу и неподрессоренную массу транспортного средства, и представляет собой гидравлический телескопический демпфер, который во время изменения прогиба упомянутой подвески создает силу сопротивления, модуль которой зависит от модуля скорости изменения упомянутого прогиба, и который содержит
рабочий цилиндр, внутренняя полость которого заполнена жидкостью,
шток, который предназначен для восприятия внешней нагрузки и установлен соосно с упомянутым рабочим цилиндром с возможностью поступательного (возвратного) движения в упомянутом рабочем цилиндре при сжатии (растяжении) демпфера,
внутреннюю полость упомянутого штока, которая сообщается с внутренней полостью упомянутого рабочего цилиндра,
поршень, который закреплен на конце упомянутого штока и делит внутреннюю полость упомянутого рабочего цилиндра на камеру сжатия, объем которой уменьшается при сжатии демпфера, и на камеру растяжения, объем которой уменьшается при растяжении демпфера,
клапан сжатия, который имеет, по меньшей мере, один подводящий канал, который выполнен в упомянутом поршне и имеет входное отверстие со стороны упомянутой камеры сжатия, а выходное отверстие со стороны упомянутой камеры растяжения,
клапан растяжения, который имеет, по меньшей мере, один подводящий канал, который выполнен в упомянутом поршне и имеет входное отверстие со стороны упомянутой камеры растяжения, а выходное отверстие со стороны упомянутой камеры сжатия,
первый запорный элемент, который является частью упомянутого клапана сжатия, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия,
второй запорный элемент, который является частью упомянутого клапана растяжения, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения,
первый упругий элемент, сила упругости которого препятствует перемещению упомянутого первого запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия, и который является частью упомянутого клапана сжатия,
второй упругий элемент, сила упругости которого препятствует перемещению упомянутого второго запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения, и который является частью упомянутого клапана растяжения,
первую опору, которая взаимодействует с упомянутым первым упругим элементом, является частью упомянутого клапана сжатия и имеет часть внутренней поверхности, которая выполнена конусной,
первый направляющий элемент, вдоль которого упомянутая первая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого первого упругого элемента,
вторую опору, которая взаимодействует с упомянутым вторым упругим элементом, является частью упомянутого клапана растяжения и имеет часть внутренней поверхности, которая выполнена конусной,
второй направляющий элемент, вдоль которого упомянутая вторая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого второго упругого элемента,
стержень, который закреплен на дне упомянутой камеры сжатия, вдвигается в упомянутую внутреннюю полость упомянутого штока при сжатии демпфера, имеет четырехгранное переменное поперечное сечение на рабочем участке своей длины, которая равна максимальному ходу упомянутого штока,
первое отверстие, выполненное в упомянутом первом направляющем элементе со стороны первой боковой поверхности упомянутого стержня и ось которого перпендикулярна продольной оси этого стержня,
второе отверстие, выполненное в упомянутом первом направляющем элементе со стороны второй боковой поверхности упомянутого стержня, которая противоположна упомянутой первой боковой поверхности этого стержня, и ось которого перпендикулярна продольной оси этого стержня,
третье отверстие, выполненное в упомянутом втором направляющем элементе со стороны третьей боковой поверхности упомянутого стержня и ось которого перпендикулярна продольной оси этого стержня,
четвертое отверстие, выполненное в упомянутом втором направляющем элементе со стороны четвертой боковой поверхности упомянутого стержня, которая противоположна упомянутой третьей боковой поверхности этого стержня, и ось которого перпендикулярна продольной оси этого стержня,
первый упор цилиндрической формы, который установлен в упомянутом первом отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой первой боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой первой опоры,
второй упор, который идентичен упомянутому первому упору, установлен в упомянутом втором отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой второй боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой первой опоры,
третий упор цилиндрической формы, который установлен в упомянутом третьем отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой третьей боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой второй опоры,
четвертый упор, который идентичен упомянутому третьему упору, установлен в упомянутом четвертом отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой четвертой боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой второй опоры,
первый дроссель, который связывает упомянутую камеру сжатия с упомянутой камерой растяжения и который образован зазором между боковой поверхностью упомянутого первого упора и поверхностью упомянутого первого отверстия,
второй дроссель, который связывает упомянутую камеру сжатия с упомянутой камерой растяжения и который образован зазором между боковой поверхностью упомянутого второго упора и поверхностью упомянутого второго отверстия.
Предлагаемое устройство отличается от устройства, известного из международной заявки на изобретение WO 02/101262 А1, тем, что:
каждому значению упомянутого прогиба подвески соответствует поперечное сечение упомянутого стержня на рабочем участке его длины,
на рабочем участке длины упомянутого стержня расстояние между упомянутой первой и упомянутой второй боковыми поверхностями этого стержня в каждом поперечном сечении этого стержня соответствует уравнению (e1):

где
L1 - расстояние между упомянутой первой и упомянутой второй боковыми поверхностями упомянутого стержня в каждом поперечном сечении этого стержня;
Ln1 - максимальное расстояние между упомянутой первой и упомянутой второй боковыми поверхностями упомянутого стержня, соответствующее недеформированному состоянию упомянутого первого упругого элемента;
α1 - угол между продольной осью упомянутого стержня и конусной внутренней поверхностью упомянутой первой опоры;
X1 - соответствующее каждому поперечному сечению упомянутого стержня заданное значение модуля упомянутой силы сопротивления, при котором открывается упомянутый клапан сжатия;
S1 - площадь поперечного сечения упомянутого рабочего цилиндра;
Sk1 - площадь упомянутого выходного отверстия подводящего канала упомянутого клапана сжатия;
C1 - жесткость упомянутого первого упругого элемента,
на рабочем участке длины упомянутого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого стержня расстояние между упомянутой третьей и упомянутой четвертой боковыми поверхностями этого стержня в каждом поперечном сечении этого стержня соответствует уравнению (е2):

где
L2 - расстояние между упомянутой третьей и упомянутой четвертой боковыми поверхностями упомянутого стержня в каждом поперечном сечении этого стержня;
Ln2 - максимальное расстояние между упомянутой третьей и упомянутой четвертой боковыми поверхностями упомянутого стержня, соответствующее недеформированному состоянию упомянутого второго упругого элемента;
α2 - угол между продольной осью упомянутого стержня и конусной внутренней поверхностью упомянутой второй опоры;
Х2 - соответствующее каждому поперечному сечению упомянутого стержня заданное значение модуля упомянутой силы сопротивления, при котором открывается упомянутый клапан растяжения;
S2 - разница между площадью поперечного сечения упомянутого рабочего цилиндра и площадью поперечного сечения упомянутого штока;
Sk2 - площадь упомянутого выходного отверстия подводящего канала упомянутого клапана растяжения;
С2 - жесткость упомянутого второго упругого элемента,
на рабочем участке длины упомянутого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня меньше 10% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
на рабочем участке длины упомянутого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня меньше 10% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
по большей мере, на части рабочего участка длины упомянутого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
по большей мере, на части на рабочего участка длины упомянутого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
проходное сечение упомянутого клапана сжатия соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
проходное сечение упомянутого клапана растяжения соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
суммарное проходное сечение упомянутого первого и упомянутого второго дросселей соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески.
Второй вариант устройства для осуществления предлагаемого способа, как и устройство, известное из международной заявки на изобретение WO 02/101262 А1, является устройством для гашения колебаний подвески транспортного средства, которая содержит, по меньшей мере, один упругий элемент, который создает силу упругости, действующую на связанные этим упругим элементом подрессоренную массу и неподрессоренную массу транспортного средства, и представляет собой гидравлический телескопический демпфер, который во время изменения прогиба упомянутой подвески создает силу сопротивления, модуль которой зависит от модуля скорости изменения упомянутого прогиба, и который содержит
рабочий цилиндр, внутренняя полость которого заполнена жидкостью,
шток, который предназначен для восприятия внешней нагрузки и установлен соосно с упомянутым рабочим цилиндром с возможностью поступательного (возвратного) движения в упомянутом рабочем цилиндре при сжатии (растяжении) демпфера,
поршень, который закреплен на конце упомянутого штока и делит внутреннюю полость упомянутого рабочего цилиндра на камеру сжатия, объем которой уменьшается при сжатии демпфера, и на камеру растяжения, объем которой уменьшается при растяжении демпфера,
клапан сжатия, который имеет, по меньшей мере, один подводящий канал, который имеет входное отверстие со стороны упомянутой камеры сжатия, а выходное отверстие со стороны другой камеры упомянутого демпфера,
клапан растяжения, который имеет, по меньшей мере, один подводящий канал, который выполнен в упомянутом поршне и имеет входное отверстие со стороны упомянутой камеры растяжения, а выходное отверстие со стороны упомянутой камеры сжатия,
первый запорный элемент, который является частью упомянутого клапана сжатия, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия,
второй запорный элемент, который является частью упомянутого клапана растяжения, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения,
первый упругий элемент, сила упругости которого препятствует перемещению упомянутого первого запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия, и который является частью упомянутого клапана сжатия,
второй упругий элемент, сила упругости которого препятствует перемещению упомянутого второго запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения, и который является частью упомянутого клапана растяжения,
первую опору, которая взаимодействует с упомянутым первым упругим элементом, является частью упомянутого клапана сжатия и имеет часть внутренней поверхности, которая выполнена конусной,
первый направляющий элемент, вдоль которого упомянутая первая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого первого упругого элемента,
вторую опору, которая взаимодействует с упомянутым вторым упругим элементом, является частью упомянутого клапана растяжения и имеет часть внутренней поверхности, которая выполнена конусной,
второй направляющий элемент, вдоль которого упомянутая вторая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого второго упругого элемента.
Предлагаемое устройство отличается от устройства, известного из международной заявки на изобретение WO 02/101262 А1, тем, что:
содержит компенсационную камеру, которая отделена от упомянутой камеры сжатия перегородкой и частично заполнена упомянутой жидкостью,
содержит перепускной клапан, который связывает упомянутую камеру сжатия с упомянутой камерой растяжения во время сжатия демпфера и имеет пренебрежимо малое сопротивление истечению упомянутой жидкости из упомянутой камеры сжатия,
упомянутый подводящий канал упомянутого клапана сжатия выполнен в упомянутой перегородке и имеет выходное отверстие со стороны упомянутой компенсационной камеры,
содержит первый стержень, который установлен соосно с упомянутым рабочим цилиндром внутри упомянутого первого направляющего элемента с возможностью продольного перемещения и на рабочем участке своей длины, которая меньше максимального хода упомянутого штока, выполнен в форме тела вращения с вогнутой или выпуклой боковой поверхностью,
один торец упомянутого первого стержня расположен в упомянутой камере сжатия, а рабочий участок длины этого стержня расположен в упомянутой компенсационной камере,
содержит второй стержень, который установлен соосно с упомянутым рабочим цилиндром внутри упомянутого второго направляющего элемента с возможностью продольного перемещения и на рабочем участке своей длины, которая меньше максимального хода упомянутого штока, выполнен в форме тела вращения с вогнутой или выпуклой боковой поверхностью,
содержит, по меньшей мере, первое и второе отверстия, выполненные в упомянутом первом направляющем элементе и оси которых перпендикулярны продольной оси упомянутого первого стержня,
содержит, по меньшей мере, третье и четвертое отверстия, выполненные в упомянутом втором направляющем элементе и оси которых перпендикулярны продольной оси упомянутого второго стержня,
содержит, по меньшей мере, первый и второй идентичные шары, установленные соответственно в упомянутых первом и втором отверстиях с возможностью возвратно-поступательного качения вдоль оси этих отверстий и каждый из которых одной стороной взаимодействует с боковой поверхностью упомянутого первого стержня, а противоположной стороной взаимодействует с конусной внутренней поверхностью упомянутой первой опоры,
содержит, по меньшей мере, третий и четвертый идентичные шары, установленные соответственно в упомянутых третьем и четвертом отверстиях с возможностью возвратно-поступательного качения вдоль оси этих отверстий и каждый из которых одной стороной взаимодействует с боковой поверхностью упомянутого второго стержня, а противоположной стороной взаимодействует с конусной внутренней поверхностью упомянутой второй опоры,
содержит третью опору, которая соединена с расположенным в упомянутой камере сжатия торцом упомянутого первого стержня,
содержит четвертую опору, которая соединена с обращенным в сторону упомянутой камеры сжатия торцом упомянутого второго стержня,
содержит первую пружину, которая установлена между упомянутой третьей опорой и упомянутой четвертой опорой,
содержит вторую пружину, которая установлена между упомянутой третьей опорой и упомянутой перегородкой и жесткость которой относится к жесткости упомянутой первой пружины, как максимальный ход упомянутого штока относится к длине рабочего участка упомянутого первого стержня,
содержит третью пружину, которая установлена между упомянутой четвертой опорой и упомянутым поршнем и жесткость которой относится к жесткости упомянутой первой пружины, как максимальный ход упомянутого штока относится к длине рабочего участка упомянутого второго стержня,
каждому значению упомянутого прогиба подвески соответствует поперечное сечение упомянутого первого стержня на рабочем участке его длины,
каждому значению упомянутого прогиба подвески соответствует поперечное сечение упомянутого второго стержня на рабочем участке его длины,
на рабочем участке длины упомянутого первого стержня диаметр в каждом поперечном сечении этого стержня соответствует уравнению (е3):

где
D1 - диаметр упомянутого первого стержня в каждом поперечном сечении этого стержня;
Dn1 - максимальный диаметр упомянутого первого стержня, соответствующий недеформированному состоянию упомянутого первого упругого элемента;
α1 - угол между продольной осью упомянутого первого стержня и конусной внутренней поверхностью упомянутой первой опоры;
X1 - соответствующее каждому поперечному сечению упомянутого первого стержня заданное значение модуля упомянутой силы сопротивления, при котором открывается упомянутый клапан сжатия;
S1 - площадь поперечного сечения упомянутого штока;
Sk1 - площадь упомянутого выходного отверстия подводящего канала упомянутого клапана сжатия;
C1 - жесткость упомянутого первого упругого элемента,
на рабочем участке длины упомянутого первого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого второго стержня диаметр в каждом поперечном сечении этого стержня соответствует уравнению (е4):

где
D2 - диаметр упомянутого второго стержня в каждом поперечном сечении этого стержня;
Dn2 - максимальный диаметр упомянутого второго стержня, соответствующий недеформированному состоянию упомянутого второго упругого элемента;
α2 - угол между продольной осью упомянутого второго стержня и конусной внутренней поверхностью упомянутой второй опоры;
Х2 - соответствующее каждому поперечному сечению упомянутого второго стержня заданное значение модуля упомянутой силы сопротивления, при котором открывается упомянутый клапан растяжения;
S2 - разница между площадью поперечного сечения упомянутого рабочего цилиндра и площадью поперечного сечения упомянутого штока;
Sk2 - площадь упомянутого выходного отверстия подводящего канала упомянутого клапана растяжения;
С2 - жесткость упомянутого второго упругого элемента,
на рабочем участке длины упомянутого второго стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого первого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого второго стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого первого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х1 для каждого поперечного сечения этого стержня меньше 10% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
на рабочем участке длины упомянутого второго стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня меньше 10% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
по большей мере, на части рабочего участка длины упомянутого первого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
по большей мере, на части рабочего участка длины упомянутого второго стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
проходное сечение упомянутого клапана сжатия соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
проходное сечение упомянутого клапана растяжения соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
содержит, по меньшей мере, один дроссель, который связывает упомянутую внутреннюю полость упомянутого рабочего цилиндра с упомянутой компенсационной камерой,
проходное сечение упомянутого дросселя соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески.
ОПИСАНИЕ ФИГУР ЧЕРТЕЖЕЙ
На фиг.1 изображен первый вариант устройства для осуществления предлагаемого способа.
На фиг.2 изображен второй вариант устройства для осуществления предлагаемого способа.
На фиг.3 изображены временные диаграммы изменения динамического напряжения в элементе кузова автомобиля ВАЗ-2110 в месте крепления правой передней стойки подвески «MacPherson» во время движения со скоростью 40 км/ч по ровному булыжнику при серийной стойке подвески и при экспериментальной стойке подвески.
На фиг.4 изображены временные диаграммы изменения динамического напряжения в элементе кузова автомобиля ВАЗ-2110 в месте крепления правой передней стойки подвески «MacPherson» во время движения со скоростью 30 км/ч по разбитому булыжнику при серийной стойке подвески и при экспериментальной стойке подвески.
На фиг.5 изображены временные диаграммы изменения динамического напряжения в элементе кузова автомобиля ВАЗ-2110 в месте крепления правой передней стойки подвески «MacPherson» во время движения со скоростью 50 км/ч по изношенному (разбитому) асфальту при серийной стойке подвески и при экспериментальной стойке подвески.
На фиг.6 изображены временные диаграммы изменения динамического напряжения в элементе кузова автомобиля ВАЗ-2110 в месте крепления правой передней стойки подвески «MacPherson» во время движения со скоростью 90 км/ч по ровному асфальту при серийной стойке подвески и при экспериментальной стойке подвески.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Возможность достижения заявленного технического результата при использовании предложенного способа подтверждается приведенным ниже анализом реакций механической колебательной системы, представляющей собой упрощенную модель подвески транспортного средства, на различные изменения профиля опорной поверхности.
Рассматриваемая механическая колебательная система содержит подрессоренную и неподрессоренную массы, которые связаны упругим элементом, который создает силу упругости, действующую на подрессоренную и неподрессоренную массы, и элементом, который во время изменения прогиба упругого элемента осуществляет вывод механической энергии из подвески и создает силу сопротивления, которая замедляет изменение прогиба и модуль которой имеет прямую зависимость от модуля скорости изменения прогиба.
В рассматриваемой колебательной системе приняты следующие допущения:
- на подрессоренную и неподрессоренную массу действует сила тяжести;
- все силы действуют вдоль одной прямой;
- направление силы тяжести принято за отрицательное направление;
- результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, уравновешена реакцией опорной поверхности.
Результирующая сила, действующая на подрессоренную массу, описывается уравнением (е5).

где
F - результирующая сила, действующая на подрессоренную массу;
Fest - статическое значение силы упругости;
ΔFe - отклонение силы упругости от статического значения (положительные значения при прогибе, большем, чем статический прогиб, отрицательные значения - при прогибе, меньшем, чем статический прогиб);
Fr - сила сопротивления;
М - подрессоренная масса;
G - модуль ускорения свободного падения.
Так как в статическом состоянии сила упругости уравновешивает вес подрессоренной массы, уравнение (е5) можно записать в виде (е5.1).
(e5.1) F=ΔFe+Fr
Результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, описывается уравнением (е6).

где
Fa - результирующая сила, прижимающая неподрессоренную массу к опорной поверхности;
Fest - статическое значение силы упругости;
ΔFe - отклонение силы упругости от статического значения (положительные значения при прогибе, большем, чем статический прогиб, отрицательные значения - при прогибе, меньшем, чем статический прогиб);
Fr - сила сопротивления;
Ма - неподрессоренная масса;
G - модуль ускорения свободного падения.
В предлагаемом способе сила сопротивления описывается уравнениями (е7.1) и (е7.2).


где
Fr - сила сопротивления;
K1 - тангенс угла наклона зависимости модуля силы сопротивления от модуля скорости изменения прогиба, соответствующий условию:
K1>2×(М×С)0,5, где М - упомянутая подрессоренная масса, С - жесткость упомянутого упругого элемента подвески (максимальная жесткость, если этот элемент имеет переменную жесткость);
V - текущая скорость изменения прогиба подвески (положительные значения при сжатии подвески, отрицательные - при растяжении);
X - текущее упомянутое заданное значение;
K2 - тангенс угла наклона зависимости модуля силы сопротивления от модуля скорости изменения прогиба, соответствующий условию:
0,0001×2×(М×С)0,5<K2<0,3×2×(М×С)0,5, где М - упомянутая подрессоренная масса, С - жесткость упомянутого упругого элемента подвески (минимальная жесткость, если этот элемент имеет переменную жесткость).
В свою очередь, текущее упомянутое заданное значение X устанавливают в соответствии с уравнениями (е8.1) и (е8.2).

если ΔFe>0 и V<0 или если ΔFe<0 и V>0

если ΔFe≥0 и V>0 или если ΔFe≤0 и V<0
Так как предлагаемый способ предусматривает установление возможно малого упомянутого заданного значения X для случая, описанного уравнением (е8.2), то приближенно можно считать справедливым уравнение (е8.2.1).

если ΔFe≥0 и V>0 или если ΔFe≤0 и V<0
Поскольку в предлагаемом способе K1 устанавливают как можно большим, а K2 устанавливают как можно меньшим, то приближенно можно считать, что во время изменения прогиба подвески модуль силы сопротивления Fr в каждый момент времени стремится к текущему упомянутому заданному значению X и соответствует уравнениям (е9.1) и (е9.2).

если ΔFe>0 и V<0 или если ΔFe<0 и V>0

если ΔFe≥0 и V>0 или если ΔFe≤0 и V<0
Анализ реакции подвески на изменения профиля опорной поверхности
1. Изменение профиля опорной поверхности в виде уступа → 
1.1. Подъезд к неровности:
- отклонение силы упругости от статического значения ΔFe равно нулю;
- скорость изменения прогиба подвески V равна нулю;
- сила сопротивления Fr равна нулю;
- уравнение (е5.1) имеет вид F=0, то есть результирующая сила, действующая на подрессоренную массу, равна нулю;
- уравнение (е6) имеет вид Fa=-Fest-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, равна сумме веса подрессоренной и неподрессоренной масс.
1.2. Въезд на неровность:
- модуль отклонения прогиба от статического значения увеличивается, а само отклонение прогиба больше нуля;
- отклонение силы упругости от статического значения ΔFe больше нуля;
- скорость изменения прогиба подвески V больше нуля;
- в соответствии с уравнением (е9.2) приближенно можно считать, что сила сопротивления Fr стремится к нулю со стороны положительных значений, так как текущее упомянутое заданное значение X установлено возможно малое;
- уравнение (е5.1) имеет вид F→ΔFe, то есть результирующая сила, действующая на подрессоренную массу, стремится к величине текущего отклонения силы упругости от статического значения;
- уравнение (е6) имеет вид Fa→-Fest-ΔFe-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме величины текущего отклонения силы упругости от статического значения и веса подрессоренной и неподрессоренной масс;
- подвеска запасает энергию, равную работе, совершенной избытком силы упругости над весом подрессоренной массы.
1.3. Движение после въезда на неровность:
- модуль отклонения прогиба от статического значения уменьшается, а само отклонение прогиба больше нуля;
- отклонение силы упругости от статического значения ΔFe больше нуля;
- скорость изменения прогиба подвески V меньше нуля;
- в соответствии с уравнением (е9.1) приближенно можно считать, что сила сопротивления Fr стремится к величине текущего отклонения силы упругости от статического значения и противоположна ему по знаку, так как текущее упомянутое заданное значение X установлено равное модулю текущего отклонения силы упругости от статического значения;
- уравнение (е5.1) имеет вид F→0, то есть результирующая сила, действующая на подрессоренную массу, стремится к нулю;
- уравнение (е6) имеет вид Fa→-Fest-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме веса подрессоренной и неподрессоренной масс;
- возврат в статическое состояние имеет апериодический характер из-за равенства работы, совершаемой избытком силы упругости над весом подрессоренной массы, и работы, совершаемой силой сопротивления.
2. Изменение профиля опорной поверхности в виде спада → 
2.1. Подъезд к неровности рассмотрен в пункте 1.1.
2.2. Съезд с неровности:
- модуль отклонения прогиба от статического значения увеличивается, а само отклонение прогиба меньше нуля;
- отклонение силы упругости от статического значения ΔFe меньше нуля;
- скорость изменения прогиба подвески V меньше нуля;
- в соответствии с уравнением (е9.2) приближенно можно считать, что сила сопротивления Fr стремится к нулю со стороны отрицательных значений, так как текущее упомянутое заданное значение X установлено возможно малое;
- уравнение (е5.1) имеет вид F→ΔFe, то есть результирующая сила, действующая на подрессоренную массу, стремится к величине текущего отклонения силы упругости от статического значения;
- уравнение (е6) имеет вид Fa→-Fest-ΔFe-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме величины текущего отклонения силы упругости от статического значения и веса подрессоренной и неподрессоренной масс;
- подвеска запасает энергию, равную работе, совершенной избытком веса подрессоренной массы над силой упругости.
2.3. Движение после съезда с неровности:
- модуль отклонения прогиба от статического значения уменьшается, а само отклонение прогиба меньше нуля;
- отклонение силы упругости от статического значения ΔFe меньше нуля;
- скорость изменения прогиба подвески V больше нуля;
- в соответствии с уравнением (е9.1) приближенно можно считать, что сила сопротивления Fr стремится к величине текущего отклонения силы упругости от статического значения и противоположна ему по знаку, так как текущее упомянутое заданное значение X установлено равное модулю текущего отклонения силы упругости от статического значения;
- уравнение (е5.1) имеет вид F→0, то есть результирующая сила, действующая на подрессоренную массу, стремится к нулю;
- уравнение (е6) имеет вид Fa→-Fest-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме веса подрессоренной и неподрессоренной масс;
- возврат в статическое состояние имеет апериодический характер из-за равенства работы, совершаемой избытком веса подрессоренной массы над силой упругости, и работы, совершаемой силой сопротивления.
3. Изменение профиля опорной поверхности в виде выступа → 
В случае когда время проезда неровности больше времени апериодического возврата подвески в положение статического равновесия, получается последовательное сочетание проезда неровности, рассмотренной в пункте 1, и неровности, рассмотренной в пункте 2. Поэтому в настоящем пункте рассмотрен случай, когда время проезда неровности меньше времени апериодического возврата подвески в положение статического равновесия.
3.1. Подъезд к выступу рассмотрен в пункте 1.1.
3.2. Въезд на выступ рассмотрен в пункте 1.2.
3.3. Движение после въезда на выступ рассмотрено в пункте 1.3. При этом происходит только частичный апериодический возврат в статическое состояние и частичная диссипация запасенной в подвеске энергии.
3.4. Съезд с выступа
Рассмотрены две фазы съезда с выступа. Первая фаза - когда текущее отклонение прогиба упругого элемента от статического значения положительное. Вторая фаза - когда текущее отклонение прогиба упругого элемента от статического значения отрицательное. Реальный съезд с выступа, в зависимости от геометрии выступа, может состоять или только из первой фазы, или из последовательности первой и второй фаз.
3.4.1. Первая фаза съезда с выступа:
- модуль отклонения прогиба от статического значения уменьшается, а само отклонение прогиба больше нуля;
- отклонение силы упругости от статического значения ΔFe больше нуля;
- скорость изменения прогиба подвески V меньше нуля;
- в соответствии с уравнением (е9.1) приближенно можно считать, что сила сопротивления Fr стремится к величине текущего отклонения силы упругости от статического значения и противоположна ему по знаку, так как текущее упомянутое заданное значение X установлено равное модулю текущего отклонения силы упругости от статического значения;
- уравнение (е5.1) имеет вид F→0, то есть результирующая сила, действующая на подрессоренную массу, стремится к нулю;
- уравнение (е6) имеет вид Fa→-Fest-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме веса подрессоренной и неподрессоренной масс;
- из-за равенства работы, совершаемой избытком силы упругости над весом подрессоренной массы, и работы, совершаемой силой сопротивления, происходит диссипация запасенной в подвеске энергии, которая соответствует разнице между начальным и конечным значениями отклонения прогиба от статического значения в процессе течения данной фазы.
3.4.2. Вторая фаза съезда с выступа:
- модуль отклонения прогиба от статического значения увеличивается, а само отклонение прогиба меньше нуля;
- отклонение силы упругости от статического значения ΔFe меньше нуля;
- скорость изменения прогиба подвески V меньше нуля;
- в соответствии с уравнением (е9.2) приближенно можно считать, что сила сопротивления Fr стремится к нулю со стороны отрицательных значений, так как текущее упомянутое заданное значение X установлено возможно малое;
- уравнение (е5.1) имеет вид F→ΔFe, то есть результирующая сила, действующая на подрессоренную массу, стремится к величине текущего отклонения силы упругости от статического значения;
- уравнение (е6) имеет вид Fa→-Fest-ΔFe-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме величины текущего отклонения силы упругости от статического значения и веса подрессоренной и неподрессоренной масс;
- подвеска запасает энергию, равную работе, совершенной избытком веса подрессоренной массы над силой упругости.
3.5. Движение после съезда с выступа
Рассмотрено два варианта движения после съезда с выступа. Первый вариант - когда возврат в статическое состояние начинается из первой фазы съезда с выступа. Второй вариант - когда возврат в статическое состояние начинается из второй фазы съезда с выступа.
3.5.1. Первый вариант движения после съезда с выступа:
- модуль отклонения прогиба от статического значения уменьшается, а само отклонение прогиба больше нуля;
- отклонение силы упругости от статического значения ΔFe больше нуля;
- скорость изменения прогиба подвески V меньше нуля;
- в соответствии с уравнением (е9.1) приближенно можно считать, что сила сопротивления Fr стремится к величине текущего отклонения силы упругости от статического значения и противоположна ему по знаку, так как текущее упомянутое заданное значение X установлено равное модулю текущего отклонения силы упругости от статического значения;
- уравнение (е5.1) имеет вид F→0, то есть результирующая сила, действующая на подрессоренную массу, стремится к нулю;
- уравнение (е6) имеет вид Fa→-Fest-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме веса подрессоренной и неподрессоренной масс;
- возврат в статическое состояние имеет апериодический характер из-за равенства работы, совершаемой избытком силы упругости над весом подрессоренной массы, и работы, совершаемой силой сопротивления.
3.5.2. Второй вариант движения после съезда с выступа:
- модуль отклонения прогиба от статического значения уменьшается, а само отклонение прогиба меньше нуля;
- отклонение силы упругости от статического значения ΔFe меньше нуля;
- скорость изменения прогиба подвески V больше нуля;
- в соответствии с уравнением (е9.1) приближенно можно считать, что сила сопротивления Fr стремится к величине текущего отклонения силы упругости от статического значения и противоположна ему по знаку, так как текущее упомянутое заданное значение X установлено равное модулю текущего отклонения силы упругости от статического значения;
- уравнение (е5.1) имеет вид F→0, то есть результирующая сила, действующая на подрессоренную массу, стремится к нулю;
- уравнение (е6) имеет вид Fa→-Fest-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме веса подрессоренной и неподрессоренной масс;
- возврат в статическое состояние имеет апериодический характер из-за равенства работы, совершаемой избытком веса подрессоренной массы над силой упругости, и работы, совершаемой силой сопротивления.
4. Изменение профиля опорной поверхности в виде впадины → 
В случае когда время проезда неровности больше времени апериодического возврата подвески в положение статического равновесия, получается последовательное сочетание проезда неровности, рассмотренной в пункте 2, и неровности, рассмотренной в пункте 1. Поэтому в настоящем пункте рассмотрен случай, когда время проезда неровности меньше времени апериодического возврата подвески в положение статического равновесия.
4.1. Подъезд ко впадине рассмотрен в пункте 1.1.
4.2. Съезд во впадину рассмотрен в пункте 2.2.
4.3. Движение после съезда во впадину рассмотрено в пункте 2.3. При этом происходит только частичный апериодический возврат в статическое состояние и частичная диссипация запасенной в подвеске энергии.
4.4. Выезд из впадины
Рассмотрены две фазы выезда из впадины. Первая фаза - когда текущее отклонение прогиба упругого элемента от статического значения отрицательное. Вторая фаза - когда текущее отклонение прогиба упругого элемента от статического значения положительное. Реальный выезд из впадины, в зависимости от геометрии впадины, может состоять или только из первой фазы, или из последовательности первой и второй фаз.
4.4.1. Первая фаза выезда из впадины:
- модуль отклонения прогиба от статического значения уменьшается, а само отклонение прогиба меньше нуля;
- отклонение силы упругости от статического значения ΔFe меньше нуля;
- скорость изменения прогиба подвески V больше нуля;
- в соответствии с уравнением (е9.1) приближенно можно считать, что сила сопротивления Fr стремится к величине текущего отклонения силы упругости от статического значения и противоположна ему по знаку, так как текущее упомянутое заданное значение X установлено равное модулю текущего отклонения силы упругости от статического значения;
- уравнение (е5.1) имеет вид F→0, то есть результирующая сила, действующая на подрессоренную массу, стремится к нулю;
- уравнение (е6) имеет вид Fa→-Fest-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме веса подрессоренной и неподрессоренной масс;
- из-за равенства работы, совершаемой избытком веса подрессоренной массы над силой упругости, и работы, совершаемой силой сопротивления, происходит диссипация запасенной в подвеске энергии, которая соответствует разнице между начальным и конечным значениями отклонения прогиба от статического значения в процессе течения данной фазы.
4.4.2. Вторая фаза выезда из впадины;
- модуль отклонения прогиба от статического значения увеличивается, а само отклонение прогиба больше нуля;
- отклонение силы упругости от статического значения ΔFe больше нуля;
- скорость изменения прогиба подвески V больше нуля;
- в соответствии с уравнением (с9.2) приближенно можно считать, что сила сопротивления Fr стремится к нулю со стороны положительных значений, так как текущее упомянутое заданное значение X установлено возможно малое;
- уравнение (е5.1) имеет вид F→ΔFe, то есть результирующая сила, действующая на подрессоренную массу, стремится к величине текущего отклонения силы упругости от статического значения;
- уравнение (е6) имеет вид Fa→-Fest-ΔFe-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме величины текущего отклонения силы упругости от статического значения и веса подрессоренной и неподрессоренной масс;
- подвеска запасает энергию, равную работе, совершенной избытком силы упругости над весом подрессоренной массы.
4.5. Движение после выезда из впадины
Рассмотрено два варианта движения после выезда из впадины. Первый вариант - когда возврат в статическое состояние начинается из первой фазы выезда из впадины. Второй вариант - когда возврат в статическое состояние начинается из второй фазы выезда из впадины.
4.5.1. Первый вариант движения после выезда из впадины:
- модуль отклонения прогиба от статического значения уменьшается, а само отклонение прогиба меньше нуля;
- отклонение силы упругости от статического значения ΔFe меньше нуля;
- скорость изменения прогиба подвески V больше нуля;
- в соответствии с уравнением (е9.1) приближенно можно считать, что сила сопротивления Fr стремится к величине текущего отклонения силы упругости от статического значения и противоположна ему по знаку, так как текущее упомянутое заданное значение X установлено равное модулю текущего отклонения силы упругости от статического значения;
- уравнение (е5.1.) имеет вид F→0, то есть результирующая сила, действующая на подрессоренную массу, стремится к нулю;
- уравнение (е6) имеет вид Fa→-Fest-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме веса подрессоренной и неподрессоренной масс;
- возврат в статическое состояние имеет апериодический характер из-за равенства работы, совершаемой избытком веса подрессоренной массы над силой упругости, и работы, совершаемой силой сопротивления.
4.5.2. Второй вариант движения после выезда из впадины:
- модуль отклонения прогиба от статического значения уменьшается, а само отклонение прогиба больше нуля;
- отклонение силы упругости от статического значения ΔFe больше нуля;
- скорость изменения прогиба подвески V меньше нуля;
- в соответствии с уравнением (е9.1) приближенно можно считать, что сила сопротивления Fr стремится к величине текущего отклонения силы упругости от статического значения и противоположна ему по знаку, так как текущее упомянутое заданное значение X установлено равное модулю текущего отклонения силы упругости от статического значения;
- уравнение (е5.1) имеет вид F→0, то есть результирующая сила, действующая на подрессоренную массу, стремится к нулю;
- уравнение (е6) имеет вид Fa→-Fest-Ma×G, то есть результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, стремится к сумме веса подрессоренной и неподрессоренной масс;
- возврат в статическое состояние имеет апериодический характер из-за равенства работы, совершаемой избытком силы упругости над весом подрессоренной массы, и работы, совершаемой силой сопротивления.
Как следует из вышеприведенного анализа, существенное отклонение результирующей силы, действующей на подрессоренную массу, от нуля, а также результирующей силы, прижимающей неподрессоренную массу к опорной поверхности, от статического значения имеет место только:
- когда текущий прогиб подвески больше статического значения в процессе сжатия подвески при наезде на препятствие;
- когда текущий прогиб меньше статического значения в процессе растяжения подвески при съезде с препятствия.
Во всех остальных ситуациях результирующая сила, действующая на подрессоренную массу, мало отличается от нуля, а результирующая сила, прижимающая неподрессоренную массу к опорной поверхности, мало отличается от статического значения.
Возникновение резонанса подрессоренной массы и резонанса неподрессоренной массы невозможно, так как в течение единичного процесса уменьшения модуля отклонения прогиба упругого элемента от статического значения происходит диссипация всей энергии, запасенной в подвеске во время предшествующего единичного процесса увеличения модуля отклонения прогиба упругого элемента от статического значения.
Этот технический результат справедлив для изменений профиля опорной поверхности любой амплитуды (в пределах хода подвески), частоты следования (в пределах быстродействия устройства для осуществления способа) и формы, поскольку:
- уравнения (е5) и (е5.1) описывают мгновенное значение результирующей силы, действующей на подрессоренную массу;
- уравнение (е6) описывает мгновенное значение результирующей силы, прижимающей неподрессоренную массу к опорной поверхности;
- уравнения (е7.1) и (е7.2) описывают мгновенное значение силы сопротивления;
- уравнения (е8.1) и (е8.2) описывают мгновенное упомянутое заданное значение;
- любые изменения профиля опорной поверхности могут быть представлены комбинацией рассмотренных в анализе неровностей.
Предложенный способ гашения колебаний механической колебательной системы, представляющей собой подвеску транспортного средства, может быть реализован посредством соединения подрессоренной массы транспортного средства с его неподрессоренной массой демпфером, который представляет собой какой-либо из двух предложенных вариантов устройства для осуществления предлагаемого способа.
Первый вариант устройства для осуществления предлагаемого способа изображен на фиг.1.
Описание конструкции устройства
Устройство представляет собой однотрубный гидравлический телескопический демпфер. Уплотнение штока и компенсационная газовая камера на фиг.1 не изображены и не рассматриваются, так как они аналогичны тем, которые традиционно используются в однотрубных гидравлических телескопических демпферах и к сути изобретения отношения не имеют.
Устройство имеет следующую конструкцию:
содержит рабочий цилиндр (1), внутренняя полость которого заполнена жидкостью,
содержит шток (2), который предназначен для восприятия внешней нагрузки и установлен соосно с рабочим цилиндром (1) с возможностью поступательного (возвратного) движения в рабочем цилиндре (1) при сжатии (растяжении) демпфера,
шток (2) имеет внутреннюю полость, которая сообщается с внутренней полостью рабочего цилиндра (1),
содержит поршень (3), который закреплен на конце штока (2) и делит внутреннюю полость рабочего цилиндра (1) на камеру сжатия (4), объем которой уменьшается при сжатии демпфера, и на камеру растяжения (5), объем которой уменьшается при растяжении демпфера,
содержит клапан сжатия, который имеет, по меньшей мере, один подводящий канал (6), который выполнен в поршне (3) и имеет входное отверстие со стороны камеры сжатия (4), а выходное отверстие со стороны камеры растяжения (5),
содержит клапан растяжения, который имеет, по меньшей мере, один подводящий канал (7), который выполнен в поршне (3) и имеет входное отверстие со стороны камеры растяжения (5), а выходное отверстие со стороны камеры сжатия (4),
содержит первый запорный элемент (8), который является частью упомянутого клапана сжатия, перекрывает выходное отверстие подводящего канала (6) этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из камеры сжатия (4),
содержит второй запорный элемент (9), который является частью упомянутого клапана растяжения, перекрывает выходное отверстие подводящего канала (7) этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из камеры растяжения (5),
содержит первый упругий элемент (10), сила упругости которого препятствует перемещению первого запорного элемента (8) под действием упомянутой жидкости, истекающей из камеры сжатия (4), и который является частью упомянутого клапана сжатия,
содержит второй упругий элемент (11), сила упругости которого препятствует перемещению второго запорного элемента (9) под действием упомянутой жидкости, истекающей из камеры растяжения (5), и который является частью упомянутого клапана растяжения,
содержит первую опору (12), которая взаимодействует с первым упругим элементом (10), является частью упомянутого клапана сжатия и имеет часть внутренней поверхности, которая выполнена конусной,
содержит первый направляющий элемент (13), вдоль которого первая опора (12) имеет возможность возвратно-поступательного перемещения в направлении первого упругого элемента (10),
содержит вторую опору (14), которая взаимодействует со вторым упругим элементом (11), является частью упомянутого клапана растяжения и имеет часть внутренней поверхности, которая выполнена конусной,
содержит второй направляющий элемент (15), вдоль которого вторая опора (14) имеет возможность возвратно-поступательного перемещения в направлении второго упругого элемента (11),
содержит стержень (16), который закреплен на дне камеры сжатия (4), вдвигается в упомянутую внутреннюю полость штока (2) при сжатии демпфера, имеет четырехгранное переменное поперечное сечение на рабочем участке своей длины, которая равна максимальному ходу штока (2),
содержит первое отверстие, выполненное в первом направляющем элементе (13) со стороны первой боковой поверхности стержня (16) и ось которого перпендикулярна продольной оси стержня (16),
содержит второе отверстие, выполненное в первом направляющем элементе (13) со стороны второй боковой поверхности стержня (16), которая противоположна упомянутой первой боковой поверхности стержня (16), и ось которого перпендикулярна продольной оси стержня (16),
содержит третье отверстие (аналогично упомянутому первому отверстию, на фиг.1 не изображено, так как расположено перпендикулярно плоскости чертежа), выполненное во втором направляющем элементе (15) со стороны третьей боковой поверхности стержня (16) и ось которого перпендикулярна продольной оси стержня (16),
содержит четвертое отверстие (аналогично упомянутому второму отверстию, на фиг.1 не изображено, так как расположено перпендикулярно плоскости чертежа), выполненное во втором направляющем элементе (15) со стороны четвертой боковой поверхности стержня (16), которая противоположна упомянутой третьей боковой поверхности стержня (16), и ось которого перпендикулярна продольной оси стержня (16),
содержит первый упор (17) цилиндрической формы, который установлен в упомянутом первом отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом, имеющим форму выпуклой цилиндрической поверхности, взаимодействует с упомянутой первой боковой поверхностью стержня (16), а противоположным своим торцом, имеющим форму наклонной выпуклой цилиндрической поверхности, взаимодействует с конусной внутренней поверхностью первой опоры (12),
содержит второй упор (18), который идентичен первому упору (17), установлен в упомянутом втором отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом, имеющим форму выпуклой цилиндрической поверхности, взаимодействует с упомянутой второй боковой поверхностью стержня (16), а противоположным своим торцом, имеющим форму наклонной выпуклой цилиндрической поверхности, взаимодействует с конусной внутренней поверхностью первой опоры (12),
содержит третий упор (идентичен упору (17), на фиг.1 не изображен, так как расположен перпендикулярно плоскости чертежа), который установлен в упомянутом третьем отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом, имеющим форму выпуклой цилиндрической поверхности, взаимодействует с упомянутой третьей боковой поверхностью стержня (16), а противоположным своим торцом, имеющим форму наклонной выпуклой цилиндрической поверхности, взаимодействует с конусной внутренней поверхностью упомянутой второй опоры (14),
содержит четвертый упор (идентичен упору (18), на фиг.1 не изображен, так как расположен перпендикулярно плоскости чертежа), который установлен в упомянутом четвертом отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом, имеющим форму выпуклой цилиндрической поверхности, взаимодействует с упомянутой четвертой боковой поверхностью стержня (16), а противоположным своим торцом, имеющим форму наклонной выпуклой цилиндрической поверхности, взаимодействует с конусной внутренней поверхностью упомянутой второй опоры (14),
содержит первый дроссель, который связывает камеру сжатия (4) с камерой растяжения (5) и который образован зазором между боковой поверхностью первого упора (17) и поверхностью упомянутого первого отверстия,
содержит второй дроссель, который связывает камеру сжатия (4) с камерой растяжения (5) и который образован зазором между боковой поверхностью второго упора (18) и поверхностью упомянутого второго отверстия,
на рабочем участке длины стержня (16) расстояние между упомянутой первой и упомянутой второй боковыми поверхностями этого стержня в каждом поперечном сечении этого стержня соответствует уравнению (e1),
на рабочем участке длины стержня (16) расстояние между упомянутой третьей и упомянутой четвертой боковыми поверхностями этого стержня в каждом поперечном сечении этого стержня соответствует уравнению (е2),
на рабочем участке длины стержня (16), который соответствует растянутому состоянию упомянутой подвески, упомянутое в уравнении (e1) заданное значение X1 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины стержня (16), который соответствует сжатому состоянию упомянутой подвески, упомянутое в уравнении (е2) заданное значение X2 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины стержня (16), который соответствует сжатому состоянию упомянутой подвески, упомянутое в уравнении (e1) заданное значение X1 для каждого поперечного сечения этого стержня равно 1% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
на рабочем участке длины стержня (16), который соответствует растянутому состоянию упомянутой подвески, упомянутое в уравнении (е2) заданное значение Х2 для каждого поперечного сечения этого стержня равно 1% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
проходное сечение упомянутого клапана сжатия в любой фазе открытия этого клапана соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
проходное сечение упомянутого клапана растяжения в любой фазе открытия этого клапана соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
суммарное проходное сечение упомянутого первого и упомянутого второго дросселей соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески.
Описание работы устройства
При возвратно-поступательном перемещении штока (2) в рабочем цилиндре (1) первый упор (17) скользит вдоль упомянутой первой боковой поверхности стержня (16), а второй упор (18) скользит вдоль упомянутой второй боковой поверхности стержня (16).
Если в процессе движения штока (2) происходит увеличение расстояния между первой и второй боковыми поверхностями стержня (16), упоры (17) и (18) выдвигаются от оси демпфера и отжимают первую опору (12) вдоль первого направляющего элемента (13) в направлении первого упругого элемента (10). При этом происходит сжатие первого упругого элемента (10) и увеличение его силы упругости, которая прижимает первый запорный элемент (8) к поршню (3). Это приводит к увеличению избыточного давления упомянутой жидкости в камере сжатия (4), при котором первый запорный элемент (8) открывает выходное отверстие подводящего канала (6) клапана сжатия во время сжатия демпфера.
Если в процессе движения штока (2) происходит уменьшение расстояния между первой и второй боковыми поверхностями стержня (16), упоры (17) и (18) сдвигаются к оси демпфера под действием первой опоры (12), которая движется вдоль первого направляющего элемента (13) в направлении от первого упругого элемента (10) под действием его силы упругости. При этом происходит растяжение первого упругого элемента (10) и уменьшение его силы упругости, которая прижимает первый запорный элемент (8) к поршню (3). Это приводит к уменьшению избыточного давления упомянутой жидкости в камере сжатия (4), при котором первый запорный элемент (8) открывает выходное отверстие подводящего канала (6) клапана сжатия во время сжатия демпфера.
Во время растяжения демпфера выходное отверстие подводящего канала (6) постоянно закрыто из-за избыточного давления упомянутой жидкости в камере растяжения (5) и силы упругости первого упругого элемента (10), которые прижимают первый запорный элемент (8) к поршню (3).
При возвратно-поступательном перемещении штока (2) в рабочем цилиндре (1) упомянутый третий упор скользит вдоль упомянутой третьей боковой поверхности стержня (16), а упомянутый четвертый упор скользит вдоль упомянутой четвертой боковой поверхности стержня (16).
Если в процессе движения штока (2) происходит увеличение расстояния между третьей и четвертой боковыми поверхностями стержня (16), третий и четвертый упоры выдвигаются от оси демпфера и отжимают вторую опору (14) вдоль второго направляющего элемента (15) в направлении второго упругого элемента (11). При этом происходит сжатие второго упругого элемента (11) и увеличение его силы упругости, которая прижимает второй запорный элемент (9) к поршню (3). Это приводит к увеличению избыточного давления упомянутой жидкости в камере растяжения (5), при котором второй запорный элемент (9) открывает выходное отверстие подводящего канала (7) клапана растяжения во время растяжений демпфера.
Если в процессе движения штока (2) происходит уменьшение расстояния между третьей и четвертой боковыми поверхностями стержня (16), третий и четвертый упоры сдвигаются к оси демпфера под действием второй опоры (14), которая движется вдоль второго направляющего элемента (15) в направлении от второго упругого элемента (11) под действием его силы упругости. При этом происходит растяжение второго упругого элемента (11) и уменьшение его силы упругости, которая прижимает второй запорный элемент (9) к поршню (3). Это приводит к уменьшению избыточного давления упомянутой жидкости в камере растяжения (5), при котором второй запорный элемент (9) открывает выходное отверстие подводящего канала (7) клапана растяжения во время растяжения демпфера.
Во время сжатия демпфера выходное отверстие подводящего канала (7) постоянно закрыто из-за избыточного давления упомянутой жидкости в камере сжатия (4) и силы упругости второго упругого элемента (11), которые прижимают второй запорный элемент (9) к поршню (3).
Модуль силы сопротивления, создаваемой демпфером во время сжатия демпфера, описывается уравнением (е10).

где
Fr - сила сопротивления;
S1 - площадь поперечного сечения рабочего цилиндра (1);
Р45 - избыточное давление упомянутой жидкости в камере сжатия (4) по отношению к давлению этой жидкости в камере растяжения (5).
Избыточное давление упомянутой жидкости в камере сжатия (4) по отношению к давлению этой жидкости в камере растяжения (5) в момент открытия упомянутого клапана сжатия описывается уравнением (e11).

где
Р45 - избыточное давление упомянутой жидкости в камере сжатия (4) по отношению к давлению этой жидкости в камере растяжения (5);
С1 - жесткость первого упругого элемента (10);
Le1 - прогиб первого упругого элемента (10);
Sk1 - площадь выходного отверстия подводящего канала (6) клапана сжатия.
Прогиб первого упругого элемента (10) описывается уравнением (е12).

где
Le1 - прогиб первого упругого элемента (10);
L1 - расстояние между упомянутой первой и упомянутой второй боковыми поверхностями стержня (16) в данном поперечном сечении этого стержня;
Ln1 - максимальное расстояние между упомянутой первой и упомянутой второй боковыми поверхностями стержня (16), соответствующее недеформированному состоянию первого упругого элемента (10);
α1 - угол между продольной осью стержня (16) и внутренней конусной поверхностью первой опоры (12).
Последовательная подстановка уравнения (e12) в уравнение (e11) и уравнения (e11) в уравнение (е10) приводит уравнение (е10) к виду (е10.1).

Подстановка уравнения (е1), которое определяет величину L1, в уравнение (е10.1) приводит к равенству  .
.
Таким образом, во время сжатия упомянутой подвески открытие упомянутого клапана сжатия происходит при равенстве модуля силы сопротивления |Fr| и упомянутого заданного значения Х1, соответствующего текущему поперечному сечению стержня (16).
Так как
- на рабочем участке длины стержня (16), который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
- на рабочем участке длины стержня (16), который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня равно 1% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
- суммарное проходное сечение упомянутого первого и упомянутого второго дросселей соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески,
- проходное сечение упомянутого клапана сжатия в любой фазе открытия этого клапана соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
то модуль упомянутой силы сопротивления изменяется в соответствии с уравнениями (е9.1) и (е9.2) для случая V>0, то есть рассматриваемое устройство обеспечивает реализацию предлагаемого способа во время сжатия упомянутой подвески.
Модуль силы сопротивления, создаваемой демпфером во время растяжения демпфера, описывается уравнением (е13).

где
Fr - сила сопротивления;
S2 - разница между площадью поперечного сечения рабочего цилиндра (1) и площадью поперечного сечения штока (2);
Р54 - избыточное давление упомянутой жидкости в камере растяжения (5) по отношению к давлению этой жидкости в камере сжатия (4).
Избыточное давление упомянутой жидкости в камере растяжения (5) по отношению к давлению этой жидкости в камере сжатия (4) в момент открытия упомянутого клапана растяжения описывается уравнением (e14).

где
Р54 - избыточное давление упомянутой жидкости в камере растяжения (5) по отношению к давлению этой жидкости в камере сжатия (4);
С2 - жесткость второго упругого элемента (11);
Le2 - прогиб второго упругого элемента (11);
Sk2 - площадь выходного отверстия подводящего канала (7) клапана растяжения.
Прогиб второго упругого элемента (11) описывается уравнением (e15).

где
Le2 - прогиб второго упругого элемента (11);
L2 - расстояние между упомянутой третьей и упомянутой четвертой боковыми поверхностями стержня (16) в данном поперечном сечении этого стержня;
Ln2 - максимальное расстояние между упомянутой третьей и упомянутой четвертой боковыми поверхностями стержня (16), соответствующее недеформированному состоянию второго упругого элемента (11);
α2 - угол между продольной осью стержня (16) и внутренней конусной поверхностью второй опоры (14).
Последовательная подстановка уравнения (e15) в уравнение (e14) и уравнения (e14) в уравнение (е13) приводит уравнение (е13) к виду (e13.1).

Подстановка уравнения (е2), которое определяет величину L2, в уравнение (e13.1) приводит к равенству |Fr|=Х2.
Таким образом, во время растяжения упомянутой подвески открытие упомянутого клапана растяжения происходит при равенстве модуля силы сопротивления |Fr| и упомянутого заданного значения Х2, соответствующего текущему поперечному сечению стержня (16).
Так как
- на рабочем участке длины стержня (16), который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
- на рабочем участке длины стержня (16), который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня равно 1% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
- суммарное проходное сечение упомянутого первого и упомянутого второго дросселей соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески,
- проходное сечение упомянутого клапана растяжения в любой фазе открытия этого клапана соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
то модуль упомянутой силы сопротивления изменяется в соответствии с уравнениями (е9.1) и (е9.2) для случая V<0, то есть рассматриваемое устройство обеспечивает реализацию предлагаемого способа во время растяжения упомянутой подвески.
Второй вариант устройства для осуществления предлагаемого способа изображен на фиг.2.
Описание конструкции устройства
Устройство представляет собой двухтрубный гидравлический телескопический демпфер. Уплотнение штока и направляющая втулка штока на фиг.2 изображены условно, так как они аналогичны тем, которые традиционно используются в двухтрубных гидравлических телескопических демпферах и к сути изобретения отношения не имеют.
Устройство имеет следующую конструкцию:
содержит рабочий цилиндр (1), внутренняя полость которого заполнена жидкостью,
содержит шток (2), который предназначен для восприятия внешней нагрузки и установлен соосно с рабочим цилиндром (1) с возможностью поступательного (возвратного) движения в рабочем цилиндре (1) при сжатии (растяжении) демпфера,
содержит поршень (3), который закреплен на конце штока (2) и делит внутреннюю полость рабочего цилиндра (1) на камеру сжатия (4), объем которой уменьшается при сжатии демпфера, и на камеру растяжения (5), объем которой уменьшается при растяжении демпфера,
содержит клапан сжатия, который имеет, по меньшей мере, один подводящий канал (6), который имеет входное отверстие со стороны камеры сжатия (4), а выходное отверстие со стороны другой камеры демпфера,
содержит клапан растяжения, который имеет, по меньшей мере, один подводящий канал (7), который выполнен в поршне (3) и имеет входное отверстие со стороны камеры растяжения (5), а выходное отверстие со стороны камеры сжатия (4),
содержит первый запорный элемент (8), который является частью упомянутого клапана сжатия, перекрывает упомянутое выходное отверстие подводящего канала (6) и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из камеры сжатия (4),
содержит второй запорный элемент (9), который является частью упомянутого клапана растяжения, перекрывает выходное отверстие подводящего канала (7) и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из камеры растяжения (5),
содержит первый упругий элемент (10), сила упругости которого препятствует перемещению первого запорного элемента (8) под действием упомянутой жидкости, истекающей из камеры сжатия (4), и который является частью упомянутого клапана сжатия,
содержит второй упругий элемент (11), сила упругости которого препятствует перемещению второго запорного элемента (9) под действием упомянутой жидкости, истекающей из камеры растяжения (5), и который является частью упомянутого клапана растяжения,
содержит первую опору (12), которая взаимодействует с первым упругим элементом (10), является частью упомянутого клапана сжатия и имеет часть внутренней поверхности, которая выполнена конусной,
содержит первый направляющий элемент (13), вдоль которого первая опора (12) имеет возможность возвратно-поступательного перемещения в направлении первого упругого элемента (10),
содержит вторую опору (14), которая взаимодействует со вторым упругим элементом (11), является частью упомянутого клапана растяжения и имеет часть внутренней поверхности, которая выполнена конусной,
содержит второй направляющий элемент (15), вдоль которого вторая опора (14) имеет возможность возвратно-поступательного перемещения в направлении второго упругого элемента (11),
содержит компенсационную камеру (16), которая отделена от камеры сжатия (4) перегородкой (17) и частично заполнена упомянутой жидкостью,
содержит перепускной клапан, который связывает камеру сжатия (4) с камерой растяжения (5) во время сжатия демпфера и имеет пренебрежимо малое сопротивление истечению упомянутой жидкости из камеры сжатия (4),
подводящий канал (6) упомянутого клапана сжатия выполнен в перегородке (17) и имеет выходное отверстие со стороны компенсационной камеры (16),
содержит первый стержень (18), который установлен соосно с рабочим цилиндром (1) внутри первого направляющего элемента (13) с возможностью продольного перемещения и на рабочем участке своей длины, которая меньше максимального хода штока (2), выполнен в форме тела вращения с вогнутой боковой поверхностью,
один торец первого стержня (18) расположен в камере сжатия (4), а рабочий участок длины этого стержня расположен в компенсационной камере (16),
содержит второй стержень (19), который установлен соосно с рабочим цилиндром (1) внутри второго направляющего элемента (15) с возможностью продольного перемещения и на рабочем участке своей длины, которая меньше максимального хода штока (2), выполнен в форме тела вращения с вогнутой боковой поверхностью,
содержит, по меньшей мере, первое и второе отверстия, выполненные в первом направляющем элементе (13) и оси которых перпендикулярны продольной оси первого стержня (18),
содержит, по меньшей мере, третье и четвертое отверстия, выполненные во втором направляющем элементе (15) и оси которых перпендикулярны продольной оси второго стержня (19),
содержит, по меньшей мере, первый (20) и второй (21) идентичные шары, установленные соответственно в упомянутых первом и втором отверстиях с возможностью возвратно-поступательного качения вдоль оси этих отверстий и каждый из которых одной стороной взаимодействует с боковой поверхностью первого стержня (18), а противоположной стороной взаимодействует с конусной внутренней поверхностью первой опоры (12),
содержит, по меньшей мере, третий (22) и четвертый (23) идентичные шары, установленные соответственно в упомянутых третьем и четвертом отверстиях с возможностью возвратно-поступательного качения вдоль оси этих отверстий и каждый из которых одной стороной взаимодействует с боковой поверхностью второго стержня (19), а противоположной стороной взаимодействует с конусной внутренней поверхностью второй опоры (14),
содержит третью опору (24), которая соединена с расположенным в камере сжатия (4) торцом первого стержня (18),
содержит четвертую опору (25), которая соединена с обращенным в сторону камеры сжатия (4) торцом второго стержня (19),
содержит первую пружину (26), которая установлена между третьей опорой (24) и четвертой опорой (25),
содержит вторую пружину (27), которая установлена между третьей опорой (24) и (через промежуточные детали) перегородкой (17) и жесткость которой относится к жесткости первой пружины (26), как максимальный ход штока (2) относится к длине рабочего участка первого стержня (18),
содержит третью пружину (28), которая установлена между четвертой опорой (25) и поршнем (3) и жесткость которой относится к жесткости первой пружины (26), как максимальный ход штока (2) относится к длине рабочего участка второго стержня (19),
каждому значению упомянутого прогиба подвески соответствует поперечное сечение первого стержня (18) на рабочем участке его длины,
каждому значению упомянутого прогиба подвески соответствует поперечное сечение второго стержня (19) на рабочем участке его длины,
на рабочем участке длины первого стержня (18) диаметр в каждом поперечном сечении этого стержня соответствует уравнению (е3),
на рабочем участке длины второго стержня (19) диаметр в каждом поперечном сечении этого стержня соответствует уравнению (е4),
на рабочем участке длины первого стержня (18), который соответствует растянутому состоянию упомянутой подвески, упомянутое в уравнении (е3) заданное значение X1 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины второго стержня (19), который соответствует сжатому состоянию упомянутой подвески, упомянутое в уравнении (е4) заданное значение Х2 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины первого стержня (18), который соответствует сжатому состоянию упомянутой подвески, упомянутое в уравнении (е3) заданное значение X1 для каждого поперечного сечения этого стержня равно 1% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
на рабочем участке длины второго стержня (19), который соответствует растянутому состоянию упомянутой подвески, упомянутое в уравнении (е4) заданное значение Х2 для каждого поперечного сечения этого стержня равно 1% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
проходное сечение упомянутого клапана сжатия в любой фазе его открытия соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
проходное сечение упомянутого клапана растяжения в любой фазе его открытия соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
содержит направляющую втулку штока (29),
содержит дроссель, который связывает камеру растяжения (5) с компенсационной камерой (16) и образован зазором между штоком (2) внутренней поверхностью направляющей втулки (29),
проходное сечение упомянутого дросселя соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески,
содержит подводящий канал (30) упомянутого перепускного клапана, который выполнен в поршне (3) и имеет входное отверстие со стороны камеры сжатия (4), а выходное отверстие со стороны камеры растяжения (5),
упомянутый перепускной клапан смонтирован на поршне (3) со стороны камеры растяжения (5) и перекрывает своим запорным элементом выходное отверстие подводящего канала (30),
содержит подводящий канал (31), который выполнен в перегородке (17) и имеет входное отверстие со стороны компенсационной камеры (16), а выходное отверстие со стороны камеры сжатия (4),
содержит впускной клапан, который смонтирован на перегородке (17), перекрывает своим запорным элементом выходное отверстие подводящего канала (31) и имеет пренебрежимо малое сопротивление перетеканию упомянутой жидкости из компенсационной камеры (16) в камеру сжатия (4).
Описание работы устройства
Во время поступательного (возвратного) движения штока (2) в рабочем цилиндре (1) происходит сжатие (растяжение) пружин (26), (27), и (28). При этом третья опора (24) приближается (удаляется) по отношению к перегородке (17), а четвертая опора (25) приближается (удаляется) по отношению к поршню (3).
Величина перемещения третьей опоры (24) и связанного с ней первого стержня (18) относительно шаров (20) и (21) равна произведению перемещения штока (2) на отношение жесткости первой пружины (26) к жесткости второй пружины (27). Так как длина рабочего участка первого стержня (18) равна произведению максимального хода штока (2) на отношение жесткости первой пружины (26) к жесткости второй пружины (27), то каждому положению штока (2) в рабочем цилиндре (1) соответствует одно поперечное сечение первого стержня (18), с которым взаимодействуют шары (20) и (21).
Величина перемещения четвертой опоры (25) и связанного с ней второго стержня (19) относительно шаров (22) и (23) равна произведению перемещения штока (2) на отношение жесткости первой пружины (26) к жесткости третьей пружины (28). Так как длина рабочего участка второго стержня (19) равна произведению максимального хода штока (2) на отношение жесткости первой пружины (26) к жесткости третьей пружины (28), то каждому положению штока (2) в рабочем цилиндре (1) соответствует одно поперечное сечение второго стержня (19), с которым взаимодействуют шары (22) и (23).
При увеличении диаметра поперечного сечения первого стержня (18) в процессе движения штока (2) шары (20) и (21) выкатываются от оси демпфера и отжимают первую опору (12) вдоль первого направляющего элемента (13) в направлении первого упругого элемента (10). При этом происходит сжатие первого упругого элемента (10) и увеличение его силы упругости, которая прижимает первый запорный элемент (8) к перегородке (17). Это приводит к увеличению избыточного давления упомянутой жидкости в камере сжатия (4), при котором первый запорный элемент (8) открывает выходное отверстие подводящего канала (6) клапана сжатия во время сжатия демпфера.
При уменьшении диаметра поперечного сечения первого стержня (18) в процессе движения штока (2) шары (20) и (21) откатываются к оси демпфера под действием первой опоры (12), которая движется вдоль первого направляющего элемента (13) в направлении от первого упругого элемента (10) под действием его силы упругости. При этом происходит растяжение первого упругого элемента (10) и уменьшение его силы упругости, которая прижимает первый запорный элемент (8) к перегородке (17). Это приводит к уменьшению избыточного давления упомянутой жидкости в камере сжатия (4), при котором первый запорный элемент (8) открывает выходное отверстие подводящего канала (6) клапана сжатия во время сжатия демпфера.
Во время растяжения демпфера выходное отверстие подводящего канала (6) постоянно закрыто из-за избыточного давления упомянутой жидкости в компенсационной камере (16) и силы упругости первого упругого элемента (10), которые прижимают первый запорный элемент (8) к перегородке (17).
При увеличении диаметра поперечного сечения второго стержня (19) в процессе движения штока (2) шары (22) и (23) выкатываются от оси демпфера и отжимают вторую опору (14) вдоль второго направляющего элемента (15) в направлении второго упругого элемента (11). При этом происходит сжатие второго упругого элемента (11) и увеличение его силы упругости, которая прижимает второй запорный элемент (9) к поршню (3). Это приводит к увеличению избыточного давления упомянутой жидкости в камере растяжения (5), при котором второй запорный элемент (9) открывает выходное отверстие подводящего канала (7) клапана растяжения во время растяжения демпфера.
При уменьшении диаметра поперечного сечения второго стержня (19) в процессе движения штока (2) шары (22) и (23) откатываются к оси демпфера под действием второй опоры (14), которая движется вдоль второго направляющего элемента (15) в направлении от второго упругого элемента (11) под действием его силы упругости. При этом происходит растяжение второго упругого элемента (11) и уменьшение его силы упругости, которая прижимает второй запорный элемент (9) к поршню (3). Это приводит к уменьшению избыточного давления упомянутой жидкости в камере растяжения (5), при котором второй запорный элемент (9) открывает выходное отверстие подводящего канала (7) клапана растяжения во время растяжения демпфера.
Во время сжатия демпфера выходное отверстие подводящего канала (7) постоянно закрыто из-за избыточного давления упомянутой жидкости в камере сжатия (4) и силы упругости второго упругого элемента (11), которые прижимают второй запорный элемент (9) к поршню (3).
Во время сжатия демпфера упомянутая жидкость истекает из камеры сжатия (4) в камеру сжатия (5) через упомянутый перепускной клапан, который оказывает пренебрежимо малое сопротивление этому истечению. Объем упомянутой жидкости, равный вдвигаемому в рабочий цилиндр (1) объему штока (2), истекает в компенсационную камеру (16) из камеры растяжения (5) через упомянутый дроссель и из камеры сжатия (4) через упомянутый клапан сжатия (если этот клапан открыт).
Во время растяжения демпфера упомянутая жидкость истекает из камеры растяжения (5) в камеру сжатия (4) через упомянутый клапан растяжения (если этот клапан открыт) и через упомянутый дроссель в компенсационную камеру (16). Объем упомянутой жидкости, равный выдвигаемому из рабочего цилиндра (1) объему штока (2), поступает из компенсационной камеры (16) через упомянутый впускной клапан, который оказывает этому перетеканию пренебрежимо малое сопротивление, в камеру сжатия (4),
Модуль силы сопротивления, создаваемой демпфером во время сжатия демпфера, описывается уравнением (e16).

где
Fr - сила сопротивления;
S1 - площадь поперечного сечения штока (2);
P1 - избыточное давление упомянутой жидкости в рабочем цилиндре (1).
Избыточное давление упомянутой жидкости в рабочем цилиндре (1) в момент открытия упомянутого клапана сжатия описывается уравнением (e17).

где
P1 - избыточное давление упомянутой жидкости в рабочем цилиндре (1);
С1 - жесткость первого упругого элемента (10);
Le1 - прогиб первого упругого элемента (10);
Sk1 - площадь выходного отверстия подводящего канала (6) клапана сжатия.
Прогиб первого упругого элемента (10) описывается уравнением (e18).

где
Le1 - прогиб первого упругого элемента (10);
D1 - диаметр первого стержня (18) в данном поперечном сечении этого стержня;
Dn1 - максимальный диаметр первого стержня (18), соответствующий недеформированному состоянию первого упругого элемента (10);
α1 - угол между продольной осью первого стержня (18) и внутренней конусной поверхностью первой опоры (12).
Последовательная подстановка уравнения (e18) в уравнение (е17) и уравнения (e17) в уравнение (е16) приводит уравнение (е16) к виду (e16.1).

Подстановка уравнения (е3), которое определяет величину D1, в уравнение (e16.1) приводит к равенству |Fr|=Х1.
Таким образом, во время сжатия упомянутой подвески открытие упомянутого клапана сжатия происходит при равенстве модуля силы сопротивления |Fr| и упомянутого заданного значения Х1, соответствующего текущему поперечному сечению первого стержня (18).
Так как
- на рабочем участке длины первого стержня (18), который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
- на рабочем участке длины первого стержня (18), который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х1 для каждого поперечного сечения этого стержня равно 1% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
- проходное сечение упомянутого дросселя соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески,
- проходное сечение упомянутого клапана сжатия в любой фазе открытия этого клапана соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
то модуль упомянутой силы сопротивления изменяется в соответствии с уравнениями (е9.1) и (е9.2) для случая V>0, то есть рассматриваемое устройство обеспечивает реализацию предлагаемого способа во время сжатия упомянутой подвески.
Модуль силы сопротивления, создаваемой демпфером во время растяжения демпфера, описывается уравнением (e19).

где
Fr - сила сопротивления;
S2 - разница между площадью поперечного сечения рабочего цилиндра (1) и площадью поперечного сечения штока (2);
Р54 - избыточное давление упомянутой жидкости в камере растяжения (5) по отношению к давлению этой жидкости в камере сжатия (4).
Избыточное давление упомянутой жидкости в камере растяжения (5) по отношению к давлению этой жидкости в камере сжатия (4) в момент открытия упомянутого клапана растяжения описывается уравнением (е20).

где
P54 - избыточное давление упомянутой жидкости в камере растяжения (5) по отношению к давлению этой жидкости в камере сжатия (4);
С2 - жесткость второго упругого элемента (11);
Le2 - прогиб второго упругого элемента (11);
Sk2 - площадь выходного отверстия подводящего канала (7) клапана растяжения.
Прогиб второго упругого элемента (11) описывается уравнением (e21).

где
Le2 - прогиб второго упругого элемента (11);
D2 - диаметр второго стержня (19) в данном поперечном сечении этого стержня;
Dn2 - максимальный диаметр второго стержня (19), соответствующий недеформированному состоянию второго упругого элемента (11);
α2 - угол между продольной осью второго стержня (19) и внутренней конусной поверхностью второй опоры (14).
Последовательная подстановка уравнения (е21) в уравнение (е20) и уравнения (е20) в уравнение (e19) приводит уравнение (e19) к виду (е19.1).

Подстановка уравнения (e4), которое определяет величину D2, в уравнение (e19.1) приводит к равенству |Fr|=Х2.
Таким образом, во время растяжения упомянутой подвески открытие упомянутого клапана растяжения происходит при равенстве модуля силы сопротивления |Fr| и упомянутого заданного значения Х2, соответствующего текущему поперечному сечению второго стержня (19).
Так как
- на рабочем участке длины второго стержня (19), который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
- на рабочем участке длины второго стержня (19), который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня равно 1% от приведенного к продольной оси демпфера модуля статического значения упомянутой силы упругости,
- проходное сечение упомянутого дросселя соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески,
- проходное сечение упомянутого клапана растяжения в любой фазе открытия этого клапана соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
то модуль упомянутой силы сопротивления изменяется в соответствии с уравнениями (е9.1) и (е9.2) для случая V<0, то есть рассматриваемое устройство обеспечивает реализацию предлагаемого способа во время растяжения упомянутой подвески.
Возможность достижения заявленного технического результата при использовании предложенного способа для случая гашения колебаний электромагнитной колебательной системы также подтверждается приведенным выше анализом реакций механической колебательной системы. Это утверждение основано на том, что процессы развития колебаний в механической и в электромагнитной колебательной системах подчиняются общим закономерностям. Это очевидным образом следует из сравнения уравнений (е5), (е7.1) и (е7.2), описывающих механическую колебательную систему с уравнениями (е20), (е21.1) и (е21.2), описывающими электромагнитную колебательную систему.
Уравнение (е20) эквивалентно уравнению (е5).

где
UL - разность электрических потенциалов, действующая на индуктивность электромагнитного контура (эквивалент результирующей силы, действующей на подрессоренную массу);
Ucst - статическое значение разности электрических потенциалов на электрической емкости электромагнитного контура (эквивалент статического значения силы упругости);
Ucd - отклонение разности электрических потенциалов на электрической емкости электромагнитного контура от статического значения, положительные значения при заряде, большем, чем статический заряд, отрицательные значения - при заряде, меньшем, чем статический заряд (эквивалент отклонения силы упругости от статического значения);
Ur - разность электрических потенциалов на активном сопротивлении электромагнитного контура (эквивалент силы сопротивления);
U0 - внешняя постоянная разность электрических потенциалов, приложенная к электромагнитному контуру (эквивалент веса подрессоренной массы).
Уравнения (е21.1) и (е21.2) эквивалентны уравнениям (е7.1) и (е7.2).


где
Ur - разность электрических потенциалов на активном сопротивлении электромагнитного контура (эквивалент силы сопротивления);
R1 - тангенс угла наклона зависимости модуля силы сопротивления от модуля скорости изменения заряда электрической емкости (величина активного электрического сопротивления электромагнитного контура), соответствующий условию:
R1>2×(L/С)0,5, где L - величина индуктивности электромагнитного контура, С - величина электрической емкости электромагнитного контура;
I - текущая скорость изменения заряда электрической емкости (сила электрического тока в электромагнитном контуре), положительные значения при увеличении заряда, отрицательные - при уменьшении;
X - текущее упомянутое заданное значение;
R2 - тангенс угла наклона зависимости модуля силы сопротивления от модуля скорости изменения заряда электрической емкости (величина активного электрического сопротивления электромагнитного контура), соответствующий условию:
0,0001×2×(L/С)0,5<R2<0,3×2×(L/С)0,5, где L - величина индуктивности электромагнитного контура, С - величина электрической емкости электромагнитного контура.
Предложенный способ гашения колебаний электромагнитной колебательной системы, представляющей собой электромагнитный колебательный контур, может быть реализован с помощью устройства, которое регулирует величину текущего активного сопротивления контура в зависимости от величины текущего отклонения заряда электрической емкости контура от статического значения по алгоритму, который задан в предлагаемом способе. Примером такого устройства может быть устройство, состоящее из:
- первого цифрового измерителя напряжения (разности электрических потенциалов);
- второго цифрового измерителя напряжения (разности электрических потенциалов);
- цифрового блока управления;
- резистивной матрицы типа «R-2R», которая изменяет свое активное сопротивление в зависимости от поданного на нее цифрового управляющего кода.
Резистивная матрица включена в электромагнитный колебательный контур в качестве его активного электрического сопротивления. Измерительный вход первого цифрового измерителя напряжения подключен к электрической емкости контура и измеряет разность потенциалов на ней. Измерительный вход второго цифрового измерителя напряжения подключен к резистивной матрице и измеряет разность потенциалов на ней. Выходы обоих цифровых измерителей подключены к входам блока управления. Выход блока управления подключен к управляющему входу резистивной матрицы.
Работает устройство следующим образом. Первый и второй измерители напряжения измеряют текущие разности потенциалов на электрической емкости контура и резистивной матрице. Блок управления выполняет следующие операции:
- определяет статическое значение разности потенциалов на электрической емкости путем вычисления постоянного члена разложения в ряд Фурье зависимости разности потенциалов на электрической емкости контура от времени;
- определяет величину модуля текущего отклонения разности потенциалов на электрической емкости контура от статического значения;
- определяет текущее направление изменения модуля отклонения разности потенциалов на электрической емкости контура от статического значения (увеличение или уменьшение) путем сравнения двух последовательных по времени значений этого модуля;
- сравнивает текущий модуль разности потенциалов на активном сопротивлении контура с модулем текущего отклонения разности потенциалов на электрической емкости от статического значения и, с учетом текущего направления изменения модуля отклонения разности потенциалов на емкости от статического значения и заложенных в память значений величины индуктивности и электрической емкости контура, вычисляет требуемое текущее значение активного сопротивления контура по заложенному в его память алгоритму предлагаемого способа;
- выдает соответствующий управляющий код на вход управления резистивной матрицы.
Резистивная матрица изменяет свое текущее активное электрическое сопротивление в соответствии с полученным от блока управления кодом.
Экспериментальное подтверждение возможности достижения заявленного технического эффекта
Возможность достижения заявленного технического эффекта подтверждена результатами сравнительных ходовых испытаний легкового автомобиля ВАЗ-2110, оснащенного серийными демпферами (амортизационными стойками), и этого же автомобиля, оснащенного экспериментальными демпферами. Экспериментальные демпферы представляли собой первый вариант устройства для осуществления предлагаемого способа.
Испытания проводились на дорожных покрытиях разного качества. Сравнительные заезды проводились профессиональным водителем-испытателем на одних и тех же участках дорог с максимальным повторением режима и траектории движения.
На фиг.3-6 представлены временные диаграммы изменения динамического напряжения в элементе кузова, к которому закреплена передняя правая стойка подвески типа «MacPherson». Динамическое напряжение в этом элементе кузова прямо пропорционально результирующей силе, действующей на кузов автомобиля, и колебаниям силы, прижимающей колесо к дороге (так как стойка подвески жестко связана с колесом). Нулевое значение динамического напряжения соответствует состоянию статического равновесия, положительные значения соответствуют избытку силы, действующей на кузов, и усилия, прижимающего колесо к дороге, по сравнению со статическим состоянием, а отрицательные значения соответствуют недостатку силы, действующей на кузов, и усилия, прижимающего колесо к дороге, по сравнению со статическим состоянием.
Как видно из представленных временных диаграмм, при использовании серийного образца происходили значительные колебания динамического напряжения, которые сильно изменялись в зависимости от качества дорожного покрытия, а на 16-й секунде временной диаграммы серийного образца, представленной на фиг.4, зафиксирован ярко выраженный пробой подвески. При использовании предлагаемого изобретения динамическое напряжение незначительно отличалось от нуля и имело небольшие максимальные отклонения практически независимо от качества дорожного покрытия и режима движения. Соответственно, и результирующая сила, действовавшая на кузов автомобиля, стремилась к нулю, а сила, прижимавшая колесо к дороге, стремилась к своему статическому значению.
Также были произведены сравнительные испытания на управляемость. Максимальная скорость выполнения маневра «переставка» (резкое изменение полосы движения) при серийных демпферах составила 82 км/ч, а при экспериментальных демпферах составила 88 км/ч. Максимальная скорость выполнения поворота радиусом 25 метров при серийных демпферах составила 62 км/ч, а при экспериментальных демпферах составила 65 км/ч.
Кроме того, при эксплуатации автомобиля ВАЗ-2110, оснащенного экспериментальными демпферами, на пробеге около 20 тысяч километров (приблизительно 60% пробега в городских условиях и 40% пробега в условиях загородных трасс) зафиксировано снижение среднего эксплуатационного расхода топлива на 15 процентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ СИЛЫ СОПРОТИВЛЕНИЯ ГИДРАВЛИЧЕСКОГО ДЕМПФЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ /ВАРИАНТЫ/ | 1998 |
|
RU2127675C1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| ДВУХСТУПЕНЧАТОЕ АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2597061C2 |
| СИСТЕМА ПОДВЕСКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, СОДЕРЖАЩАЯ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2009 |
|
RU2448000C2 |
| СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2456170C2 |
| Демпфер подвески транспортного средства | 1988 |
|
SU1573258A2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2575368C1 |
| ДВУХРЕЖИМНАЯ СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2705472C1 |
| ПНЕВМАТИЧЕСКАЯ ПОДВЕСКА | 2007 |
|
RU2340468C1 |
| Демпфер подвески транспортного средства | 1982 |
|
SU1260590A1 |
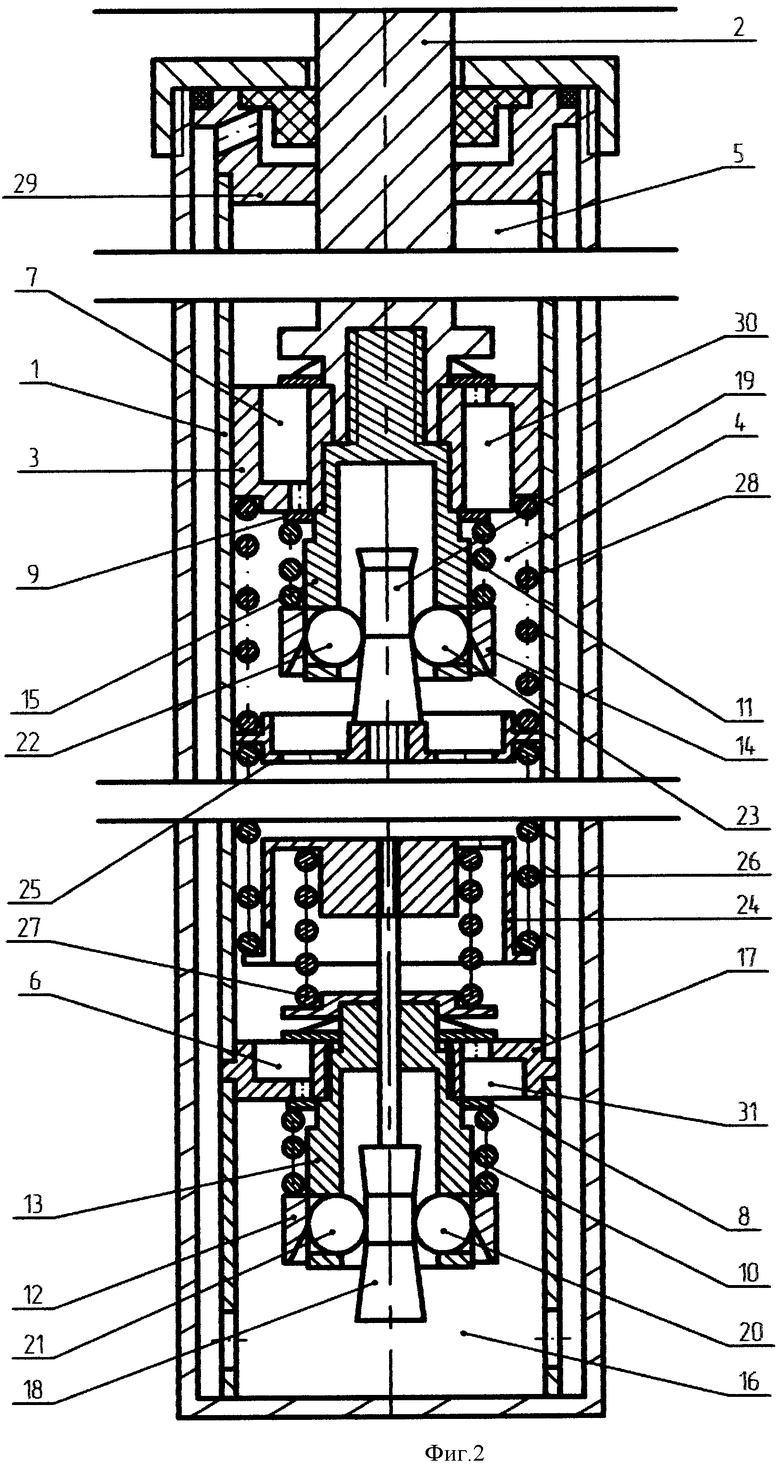
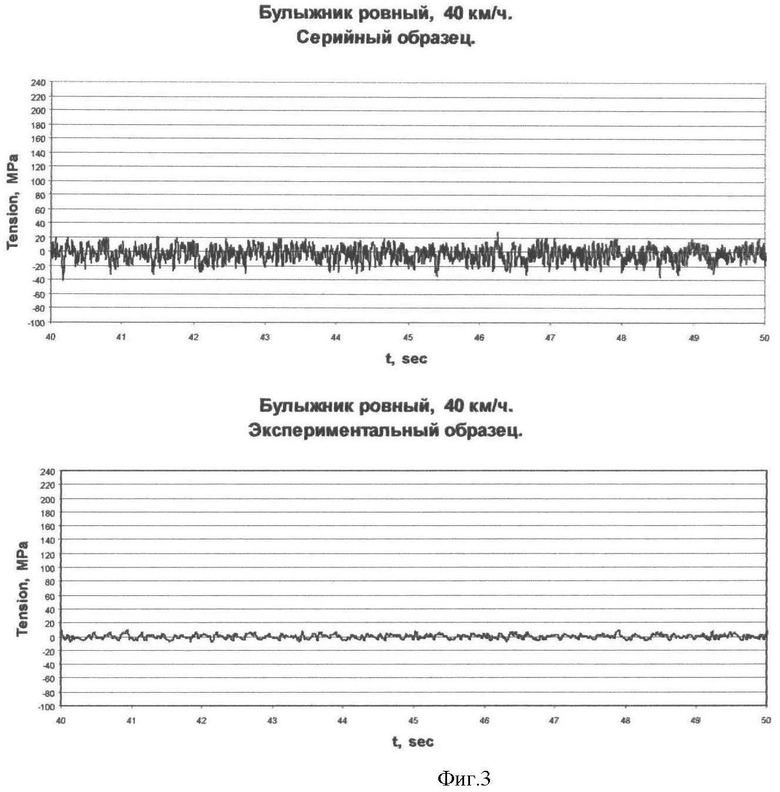
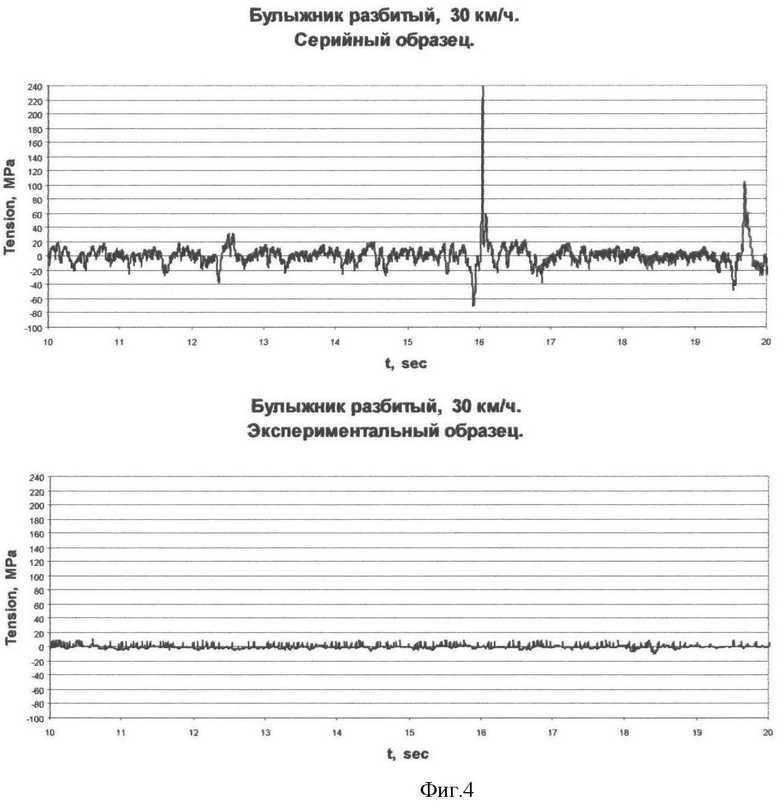
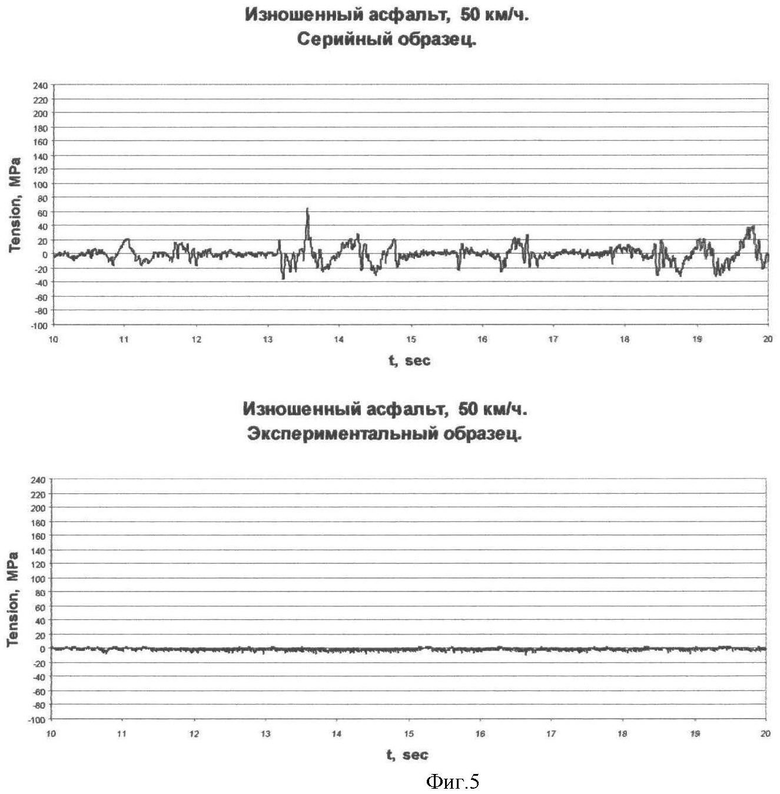
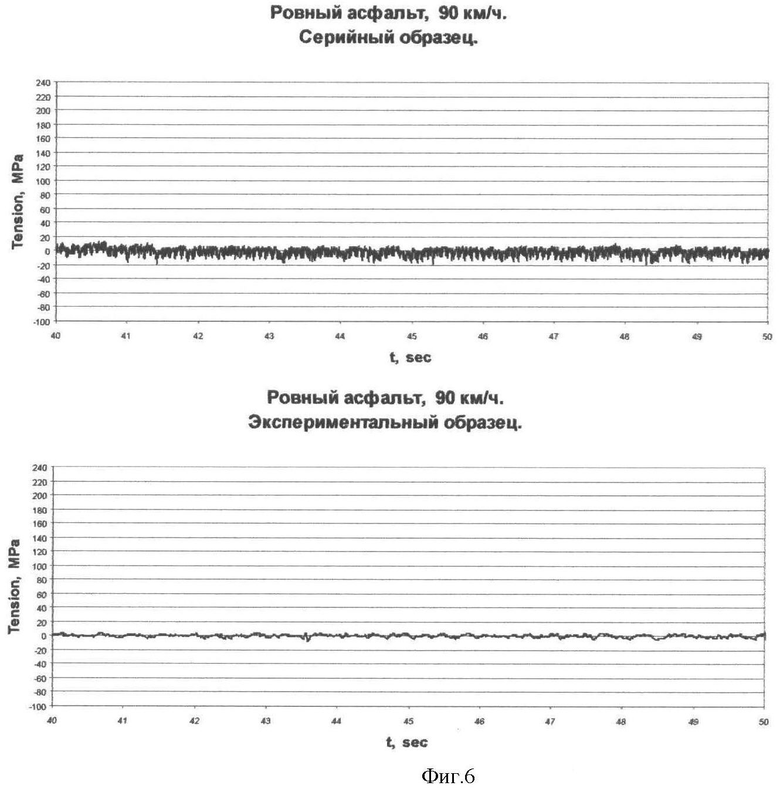
Группа изобретений относится к машиностроению. Способ заключается в следующем. Изменяют угол наклона зависимости модуля силы сопротивления от модуля скорости прогиба упругого элемента, если текущий модуль силы сопротивления отличается от заданного значения. Изменяют заданное значение силы сопротивления в зависимости от текущего прогиба упругого элемента. Текущее заданное значение силы сопротивления устанавливают прямо пропорционально приведенному к вектору силы сопротивления модулю текущего отклонения силы упругости упругого элемента от ее статической величины. Устройство для осуществления способа представляет собой гидравлический телескопический демпфер, в котором во время изменения прогиба подвески создается сила сопротивления, модуль которой зависит от модуля скорости изменения прогиба. Демпфер по первому варианту содержит стержень, закрепленный на дне камеры сжатия. Стержень имеет четырехгранное переменное поперечное сечение на рабочем участке своей длины. При сжатии демпфера стержень вдвигается во внутреннюю полость штока. По второму варианту демпфер содержит два стержня, а также компенсационную камеру, которая отделена от камеры сжатия перегородкой и частично заполнена жидкостью. Стержни выполнены в форме тела вращения и установлены внутри соответственно первого и второго направляющих элементов с возможностью продольного перемещения. Достигается предотвращение резонанса, а также минимизация результирующей силы, действующей на подрессоренную массу транспортного средства. 3 н. и 14 з.п. ф-лы, 10 ил.
1. Способ гашения колебаний колебательной системы, содержащей, по меньшей мере, один первый элемент, который обладает инерционным свойством, по меньшей мере, один второй элемент, который, изменяя свое состояние под действием внешней, по отношению к этому элементу, силы, запасает потенциальную энергию и вследствие этого создает потенциальную силу, действующую на связанные с этим элементом другие элементы колебательной системы, и, по меньшей мере, один третий элемент, который в процессе циркуляции энергии между упомянутыми первым и вторым элементами выводит энергию из колебательной системы путем ее расходования на совершение работы вне колебательной системы и создает силу сопротивления, модуль которой имеет прямую зависимость от модуля скорости изменения состояния упомянутого второго элемента, и которая замедляет это изменение, при котором
уменьшают (увеличивают) угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, если текущий модуль упомянутой силы сопротивления больше (меньше) заданного значения,
изменяют упомянутое заданное значение в зависимости от текущего состояния упомянутого второго элемента, по меньшей мере, на части максимального интервала изменения значений его состояния,
отличающийся тем, что
во время уменьшения модуля отклонения текущего состояния упомянутого второго элемента от статического состояния устанавливают текущее упомянутое заданное значение, прямо пропорциональное приведенному к вектору упомянутой силы сопротивления модулю текущего отклонения упомянутой потенциальной силы упомянутого второго элемента от ее статической величины.
2. Способ по п.1, отличающийся тем, что
во время уменьшения модуля отклонения текущего состояния упомянутого второго элемента от статического состояния устанавливают текущее упомянутое заданное значение, равное приведенному к вектору упомянутой силы сопротивления модулю текущего отклонения упомянутой потенциальной силы упомянутого второго элемента от ее статической величины.
3. Способ по п.1 или 2, отличающийся тем, что
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой колебательной системы, если текущий модуль упомянутой силы сопротивления равен или меньше текущего упомянутого заданного значения,
устанавливают угол наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения состояния упомянутого второго элемента, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой колебательной системы, если текущий модуль упомянутой силы сопротивления больше текущего упомянутого заданного значения.
4. Способ по п.3, отличающийся тем, что
во время увеличения модуля отклонения текущего состояния упомянутого второго элемента от статического состояния устанавливают упомянутое заданное значение не больше 10% от приведенного к вектору упомянутой силы сопротивления модуля статической величины упомянутой потенциальной силы упомянутого второго элемента.
5. Способ по п.4, отличающийся тем, что
изменяют текущее упомянутое заданное значение в прямой зависимости от модуля текущего отклонения упомянутой потенциальной силы упомянутого второго элемента от ее статической величины, по большей мере, на части максимального интервала значений отклонения состояния упомянутого второго элемента от статического состояния во время увеличения модуля этого отклонения.
6. Способ по п.5, отличающийся тем, что
осуществляют гашение колебаний механической колебательной системы, которая представляет собой подвеску транспортного средства, в которой упомянутым первым элементом колебательной системы является подрессоренная масса транспортного средства, упомянутым вторым элементом колебательной системы является упругий элемент упомянутой подвески, который связывает упомянутую подрессоренную массу транспортного средства с его неподрессоренной массой, через которую упомянутая подвеска воспринимает внешние возмущения, упомянутым состоянием упомянутого второго элемента колебательной системы является прогиб упомянутого упругого элемента, а упомянутой потенциальной силой этого элемента является сила упругости упругого элемента, упомянутым третьим элементом колебательной системы является демпфер, который связывает упомянутые подрессоренную и неподрессоренную массы транспортного средства, и который во время изменения прогиба упомянутого упругого элемента создает силу сопротивления, замедляющую изменение этого прогиба, и модуль которой имеет прямую зависимость от модуля скорости изменения этого прогиба,
устанавливают и изменяют угол наклона упомянутой зависимости модуля силы сопротивления упомянутого демпфера от модуля скорости изменения упомянутого прогиба упомянутого упругого элемента,
устанавливают и изменяют упомянутое заданное значение в зависимости от текущего отклонения упомянутой силы упругости упомянутого упругого элемента от ее статической величины.
7. Устройство для гашения колебаний подвески транспортного средства, которая содержит, по меньшей мере, один упругий элемент, который создает силу упругости, действующую на связанные этим упругим элементом подрессоренную массу и неподрессоренную массу транспортного средства, и представляет собой гидравлический телескопический демпфер, который во время изменения прогиба упомянутой подвески создает силу сопротивления, модуль которой зависит от модуля скорости изменения упомянутого прогиба, и который содержит
рабочий цилиндр, внутренняя полость которого заполнена жидкостью,
шток, который предназначен для восприятия внешней нагрузки и установлен соосно с упомянутым рабочим цилиндром с возможностью поступательного (возвратного) движения в упомянутом рабочем цилиндре при сжатии (растяжении) демпфера,
внутреннюю полость упомянутого штока, которая сообщается с внутренней полостью упомянутого рабочего цилиндра,
поршень, который закреплен на конце упомянутого штока и делит внутреннюю полость упомянутого рабочего цилиндра на камеру сжатия, объем которой уменьшается при сжатии демпфера, и на камеру растяжения, объем которой уменьшается при растяжении демпфера,
клапан сжатия, который имеет, по меньшей мере, один подводящий канал, который выполнен в упомянутом поршне и имеет входное отверстие со стороны упомянутой камеры сжатия, а выходное отверстие со стороны упомянутой камеры растяжения,
клапан растяжения, который имеет, по меньшей мере, один подводящий канал, который выполнен в упомянутом поршне и имеет входное отверстие со стороны упомянутой камеры растяжения, а выходное отверстие со стороны упомянутой камеры сжатия,
первый запорный элемент, который является частью упомянутого клапана сжатия, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия,
второй запорный элемент, который является частью упомянутого клапана растяжения, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения,
первый упругий элемент, сила упругости которого препятствует перемещению упомянутого первого запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия, и который является частью упомянутого клапана сжатия,
второй упругий элемент, сила упругости которого препятствует перемещению упомянутого второго запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения, и который является частью упомянутого клапана растяжения,
первую опору, которая взаимодействует с упомянутым первым упругим элементом, является частью упомянутого клапана сжатия и имеет часть внутренней поверхности, которая выполнена конусной,
первый направляющий элемент, вдоль которого упомянутая первая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого первого упругого элемента,
вторую опору, которая взаимодействует с упомянутым вторым упругим элементом, является частью упомянутого клапана растяжения и имеет часть внутренней поверхности, которая выполнена конусной,
второй направляющий элемент, вдоль которого упомянутая вторая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого второго упругого элемента,
стержень, который закреплен на дне упомянутой камеры сжатия, вдвигается в упомянутую внутреннюю полость упомянутого штока при сжатии демпфера, имеет четырехгранное переменное поперечное сечение на рабочем участке своей длины, которая равна максимальному ходу упомянутого штока,
первое отверстие, выполненное в упомянутом первом направляющем элементе со стороны первой боковой поверхности упомянутого стержня, и ось которого перпендикулярна продольной оси этого стержня,
второе отверстие, выполненное в упомянутом первом направляющем элементе со стороны второй боковой поверхности упомянутого стержня, которая противоположна упомянутой первой боковой поверхности этого стержня, и ось которого перпендикулярна продольной оси этого стержня,
третье отверстие, выполненное в упомянутом втором направляющем элементе со стороны третьей боковой поверхности упомянутого стержня и ось которого перпендикулярна продольной оси этого стержня,
четвертое отверстие, выполненное в упомянутом втором направляющем элементе со стороны четвертой боковой поверхности упомянутого стержня, которая противоположна упомянутой третьей боковой поверхности этого стержня, и ось которого перпендикулярна продольной оси этого стержня,
первый упор цилиндрической формы, который установлен в упомянутом первом отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой первой боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой первой опоры,
второй упор, который идентичен упомянутому первому упору, установлен в упомянутом втором отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой второй боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой первой опоры,
третий упор цилиндрической формы, который установлен в упомянутом третьем отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой третьей боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой второй опоры,
четвертый упор, который идентичен упомянутому третьему упору, установлен в упомянутом четвертом отверстии с возможностью возвратно-поступательного перемещения вдоль оси этого отверстия и одним своим торцом взаимодействует с упомянутой четвертой боковой поверхностью стержня, а противоположным своим торцом взаимодействует с конусной внутренней поверхностью упомянутой второй опоры,
первый дроссель, который связывает упомянутую камеру сжатия с упомянутой камерой растяжения и который образован зазором между боковой поверхностью упомянутого первого упора и поверхностью упомянутого первого отверстия,
второй дроссель, который связывает упомянутую камеру сжатия с упомянутой камерой растяжения и который образован зазором между боковой поверхностью упомянутого второго упора и поверхностью упомянутого второго отверстия,
отличающееся тем, что
каждому значению упомянутого прогиба подвески соответствует поперечное сечение упомянутого стержня на рабочем участке его длины,
на рабочем участке длины упомянутого стержня расстояние между упомянутой первой и упомянутой второй боковыми поверхностями этого стержня в каждом поперечном сечении этого стержня соответствует уравнению
L1=Ln1+2·tgα1·(X1/S1)·Sk1/C1,
где L1 - расстояние между упомянутой первой и упомянутой второй боковыми поверхностями упомянутого стержня в каждом поперечном сечении этого стержня;
Ln1 - максимальное расстояние между упомянутой первой и упомянутой второй боковыми поверхностями упомянутого стержня, соответствующее недеформированному состоянию упомянутого первого упругого элемента;
α1 - угол между продольной осью упомянутого стержня и конусной внутренней поверхностью упомянутой первой опоры;
X1 - соответствующее каждому поперечному сечению упомянутого стержня заданное значение модуля упомянутой силы сопротивления, при котором открывается упомянутый клапан сжатия;
S1 - площадь поперечного сечения упомянутого рабочего цилиндра;
Sk1 - площадь упомянутого выходного отверстия подводящего канала упомянутого клапана сжатия;
C1 - жесткость упомянутого первого упругого элемента,
на рабочем участке длины упомянутого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого стержня расстояние между упомянутой третьей и упомянутой четвертой боковыми поверхностями этого стержня в каждом поперечном сечении этого стержня соответствует уравнению
L2=Ln2+2·tgα2·(X2/S2)·Sk2/C2,
где L2 - расстояние между упомянутой третьей и упомянутой четвертой боковыми поверхностями упомянутого стержня в каждом поперечном сечении этого стержня;
Ln2 - максимальное расстояние между упомянутой третьей и упомянутой четвертой боковыми поверхностями упомянутого стержня, соответствующее недеформированному состоянию упомянутого второго упругого элемента;
α2 - угол между продольной осью упомянутого стержня и конусной внутренней поверхностью упомянутой второй опоры;
Х2 - соответствующее каждому поперечному сечению упомянутого стержня заданное значение модуля упомянутой силы сопротивления, при котором открывается упомянутый клапан растяжения;
S2 - разница между площадью поперечного сечения упомянутого рабочего цилиндра и площадью поперечного сечения упомянутого штока;
Sk2 - площадь упомянутого выходного отверстия подводящего канала упомянутого клапана растяжения;
С2 - жесткость упомянутого второго упругого элемента,
на рабочем участке длины упомянутого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения.
8. Устройство по п.7, отличающееся тем, что
на рабочем участке длины упомянутого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения.
9. Устройство по п.7 или 8, отличающееся тем, что
проходное сечение упомянутого клапана сжатия соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
проходное сечение упомянутого клапана растяжения соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
суммарное проходное сечение упомянутого первого и упомянутого второго дросселей соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески.
10. Устройство по п.9, отличающееся тем, что
на рабочем участке длины упомянутого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня не больше 10% от приведенного к продольной оси демпфера статического значения упомянутой силы упругости,
на рабочем участке длины упомянутого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня не больше 10% от приведенного к продольной оси демпфера статического значения упомянутой силы упругости.
11. Устройство по п.10, отличающееся тем, что
по большей мере, на части рабочего участка длины упомянутого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
по большей мере, на части рабочего участка длины упомянутого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения.
12. Устройство для гашения колебаний подвески транспортного средства, которая содержит, по меньшей мере, один упругий элемент, который создает силу упругости, действующую на связанные этим упругим элементом подрессоренную массу и неподрессоренную массу транспортного средства, и представляет собой гидравлический телескопический демпфер, который во время изменения прогиба упомянутой подвески создает силу сопротивления, модуль которой зависит от модуля скорости изменения упомянутого прогиба, и который содержит
рабочий цилиндр, внутренняя полость которого заполнена жидкостью,
шток, который предназначен для восприятия внешней нагрузки и установлен соосно с упомянутым рабочим цилиндром с возможностью поступательного (возвратного) движения в упомянутом рабочем цилиндре при сжатии (растяжении) демпфера,
поршень, который закреплен на конце упомянутого штока и делит внутреннюю полость упомянутого рабочего цилиндра на камеру сжатия, объем которой уменьшается при сжатии демпфера, и на камеру растяжения, объем которой уменьшается при растяжении демпфера,
клапан сжатия, который имеет, по меньшей мере, один подводящий канал, который имеет входное отверстие со стороны упомянутой камеры сжатия, а выходное отверстие со стороны другой камеры упомянутого демпфера,
клапан растяжения, который имеет, по меньшей мере, один подводящий канал, который выполнен в упомянутом поршне и имеет входное отверстие со стороны упомянутой камеры растяжения, а выходное отверстие со стороны упомянутой камеры сжатия,
первый запорный элемент, который является частью упомянутого клапана сжатия, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия,
второй запорный элемент, который является частью упомянутого клапана растяжения, перекрывает упомянутое выходное отверстие подводящего канала этого клапана и установлен с возможностью перемещения под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения,
первый упругий элемент, сила упругости которого препятствует перемещению упомянутого первого запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры сжатия, и который является частью упомянутого клапана сжатия,
второй упругий элемент, сила упругости которого препятствует перемещению упомянутого второго запорного элемента под действием упомянутой жидкости, истекающей из упомянутой камеры растяжения, и который является частью упомянутого клапана растяжения,
первую опору, которая взаимодействует с упомянутым первым упругим элементом, является частью упомянутого клапана сжатия и имеет часть внутренней поверхности, которая выполнена конусной,
первый направляющий элемент, вдоль которого упомянутая первая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого первого упругого элемента,
вторую опору, которая взаимодействует с упомянутым вторым упругим элементом, является частью упомянутого клапана растяжения и имеет часть внутренней поверхности, которая выполнена конусной,
второй направляющий элемент, вдоль которого упомянутая вторая опора имеет возможность возвратно-поступательного перемещения в направлении упомянутого второго упругого элемента,
отличающееся тем, что
содержит компенсационную камеру, которая отделена от упомянутой камеры сжатия перегородкой и частично заполнена упомянутой жидкостью,
содержит перепускной клапан, который связывает упомянутую камеру сжатия с упомянутой камерой растяжения во время сжатия демпфера и имеет пренебрежимо малое сопротивление истечению упомянутой жидкости из упомянутой камеры сжатия,
упомянутый подводящий канал упомянутого клапана сжатия выполнен в упомянутой перегородке и имеет выходное отверстие со стороны упомянутой компенсационной камеры,
содержит первый стержень, который установлен соосно с упомянутым рабочим цилиндром внутри упомянутого первого направляющего элемента с возможностью продольного перемещения и на рабочем участке своей длины, которая меньше максимального хода упомянутого штока, выполнен в форме тела вращения с вогнутой или выпуклой боковой поверхностью,
один торец упомянутого первого стержня расположен в упомянутой камере сжатия, а рабочий участок длины этого стержня расположен в упомянутой компенсационной камере,
содержит второй стержень, который установлен соосно с упомянутым рабочим цилиндром внутри упомянутого второго направляющего элемента с возможностью продольного перемещения и на рабочем участке своей длины, которая меньше максимального хода упомянутого штока, выполнен в форме тела вращения с вогнутой или выпуклой боковой поверхностью,
содержит, по меньшей мере, первое и второе отверстия, выполненные в упомянутом первом направляющем элементе, и оси которых перпендикулярны продольной оси упомянутого первого стержня,
содержит, по меньшей мере, третье и четвертое отверстия, выполненные в упомянутом втором направляющем элементе, и оси которых перпендикулярны продольной оси упомянутого второго стержня,
содержит, по меньшей мере, первый и второй идентичные шары, установленные соответственно в упомянутых первом и втором отверстиях с возможностью возвратно-поступательного качения вдоль оси этих отверстий, и каждый из которых одной стороной взаимодействует с боковой поверхностью упомянутого первого стержня, а противоположной стороной взаимодействует с конусной внутренней поверхностью упомянутой первой опоры,
содержит, по меньшей мере, третий и четвертый идентичные шары, установленные соответственно в упомянутых третьем и четвертом отверстиях с возможностью возвратно-поступательного качения вдоль оси этих отверстий, и каждый из которых одной стороной взаимодействует с боковой поверхностью упомянутого второго стержня, а противоположной стороной взаимодействует с конусной внутренней поверхностью упомянутой второй опоры,
содержит третью опору, которая соединена с расположенным в упомянутой камере сжатия торцом упомянутого первого стержня,
содержит четвертую опору, которая соединена с обращенным в сторону упомянутой камеры сжатия торцом упомянутого второго стержня,
содержит первую пружину, которая установлена между упомянутой третьей опорой и упомянутой четвертой опорой,
содержит вторую пружину, которая установлена между упомянутой третьей опорой и упомянутой перегородкой, и жесткость которой относится к жесткости упомянутой первой пружины, как максимальный ход упомянутого штока относится к длине рабочего участка упомянутого первого стержня,
содержит третью пружину, которая установлена между упомянутой четвертой опорой и упомянутым поршнем, и жесткость которой относится к жесткости упомянутой первой пружины, как максимальный ход упомянутого штока относится к длине рабочего участка упомянутого второго стержня.
13. Устройство по п.12, отличающееся тем, что
каждому значению упомянутого прогиба подвески соответствует поперечное сечение упомянутого первого стержня на рабочем участке его длины,
каждому значению упомянутого прогиба подвески соответствует поперечное сечение упомянутого второго стержня на рабочем участке его длины,
на рабочем участке длины упомянутого первого стержня диаметр в каждом поперечном сечении этого стержня соответствует уравнению
D1=Dn1+2·tgα1·(X1/S1)·Sk1/C1,
где D1 - диаметр упомянутого первого стержня в каждом поперечном сечении этого стержня;
Dn1 - максимальный диаметр упомянутого первого стержня, соответствующий недеформированному состоянию упомянутого первого упругого элемента;
α1 - угол между продольной осью упомянутого первого стержня и конусной внутренней поверхностью упомянутой первой опоры;
X1 - соответствующее каждому поперечному сечению упомянутого первого стержня заданное значение модуля упомянутой силы сопротивления, при котором открывается упомянутый клапан сжатия;
S1 - площадь поперечного сечения упомянутого штока;
Sk1 - площадь упомянутого выходного отверстия подводящего канала упомянутого клапана сжатия;
C1 - жесткость упомянутого первого упругого элемента,
на рабочем участке длины упомянутого первого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого второго стержня диаметр в каждом поперечном сечении этого стержня соответствует уравнению
D2=Dn2+2·tgα2·(X2/S2)·Sk2/C2,
где D2 - диаметр упомянутого второго стержня в каждом поперечном сечении этого стержня;
Dn2 - максимальный диаметр упомянутого второго стержня, соответствующий недеформированному состоянию упомянутого второго упругого элемента;
α2 - угол между продольной осью упомянутого второго стержня и конусной внутренней поверхностью упомянутой второй опоры;
Х2 - соответствующее каждому поперечному сечению упомянутого второго стержня заданное значение модуля упомянутой силы сопротивления, при котором открывается упомянутый клапан растяжения;
S2 - разница между площадью поперечного сечения упомянутого рабочего цилиндра и площадью поперечного сечения упомянутого штока;
Sk2 - площадь упомянутого выходного отверстия подводящего канала упомянутого клапана растяжения;
С2 - жесткость упомянутого второго упругого элемента,
на рабочем участке длины упомянутого второго стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения.
14. Устройство по п.13, отличающееся тем, что
на рабочем участке длины упомянутого первого стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
на рабочем участке длины упомянутого второго стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня равно приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения.
15. Устройство по п.13 или 14, отличающееся тем, что
проходное сечение упомянутого клапана сжатия соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
проходное сечение упомянутого клапана растяжения соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого меньше 30% и больше 0,01% от тангенса максимального угла наклона этой зависимости, который соответствует колебательному затуханию возмущений упомянутой подвески,
содержит, по меньшей мере, один дроссель, который связывает упомянутую внутреннюю полость упомянутого рабочего цилиндра с упомянутой компенсационной камерой,
проходное сечение упомянутого дросселя соответствует углу наклона упомянутой зависимости модуля силы сопротивления от модуля скорости изменения прогиба, тангенс которого больше тангенса минимального угла наклона этой зависимости, который соответствует апериодическому затуханию возмущений упомянутой подвески.
16. Устройство по п.15, отличающееся тем, что
на рабочем участке длины упомянутого первого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня не больше 10% от приведенного к продольной оси демпфера статического значения упомянутой силы упругости,
на рабочем участке длины упомянутого второго стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение Х2 для каждого поперечного сечения этого стержня не больше 10% от приведенного к продольной оси демпфера статического значения упомянутой силы упругости.
17. Устройство по п.16, отличающееся тем, что
по большей мере, на части рабочего участка длины упомянутого первого стержня, который соответствует сжатому состоянию упомянутой подвески, упомянутое заданное значение X1 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения,
по большей мере, на части рабочего участка длины упомянутого второго стержня, который соответствует растянутому состоянию упомянутой подвески, упомянутое заданное значение X2 для каждого поперечного сечения этого стержня прямо пропорционально приведенному к продольной оси демпфера и соответствующему этому поперечному сечению стержня модулю отклонения упомянутой силы упругости от ее статического значения.
| СПОСОБ РЕГУЛИРОВАНИЯ СИЛЫ СОПРОТИВЛЕНИЯ ГИДРАВЛИЧЕСКОГО ДЕМПФЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ /ВАРИАНТЫ/ | 1998 |
|
RU2127675C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для построения различных кривых второго порядка | 1951 |
|
SU96920A1 |
| ГИДРОПНЕВМАТИЧЕСКИЙ ДЕМПФЕР | 2001 |
|
RU2216665C2 |
| Бункерное загрузочно-ориентирующее устройство | 1983 |
|
SU1191251A1 |
| EP 1085233 A2, 21.03.2001. | |||

