Настоящее изобретение касается распределенной архитектуры для комплекса средств обеспечения воздушной навигации.
Для определения местоположения во время полета относительно неподвижных точек на земле летательный аппарат принимает определенное количество сигналов, излучаемых находящимися в этих точках маяками. Эти сигналы позволяют определить либо расстояние до неподвижной точки, либо направление в горизонтальной плоскости, касательной к земле и содержащей эту точку, либо направление относительно локальной вертикали. Для обработки этих сигналов летательный аппарат оборудован набором антенн, соединенных коаксиальными кабелями с соответствующими приемниками, которые установлены в электронной стойке, находящейся вблизи кабины экипажа.
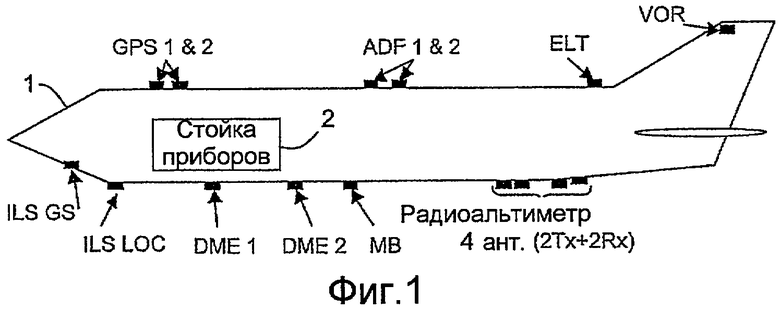
На фиг.1 показан упрощенный пример расположения антенн, связанных с приборами навигационного оборудования летательного аппарата 1. Эти антенны связаны, например, со следующими приборами: GPS (две антенны), ADF (Automatic Direction Finder - автоматическое устройство определения направления, тоже с двумя антеннами), ELT (Energy Locator Transmitter - передатчик локализации энергии), VOR, ILS-GS (ILS-Glide Slope - ILS определения угла наклона снижения), ILS-LOC (ILS Localizer - ILS локализации), DME-1 и DME-2 (Distance Measuring Equipment - оборудование измерения расстояния), MB (Marker Beacon - радиомаркер) и радиоальтиметр (всего четыре антенны, то есть две принимающих и две излучающих). Все эти антенны соединены коаксиальными кабелями с соответствующими передающими и/или принимающими приборами, сгруппированными в электронной стойке 2.
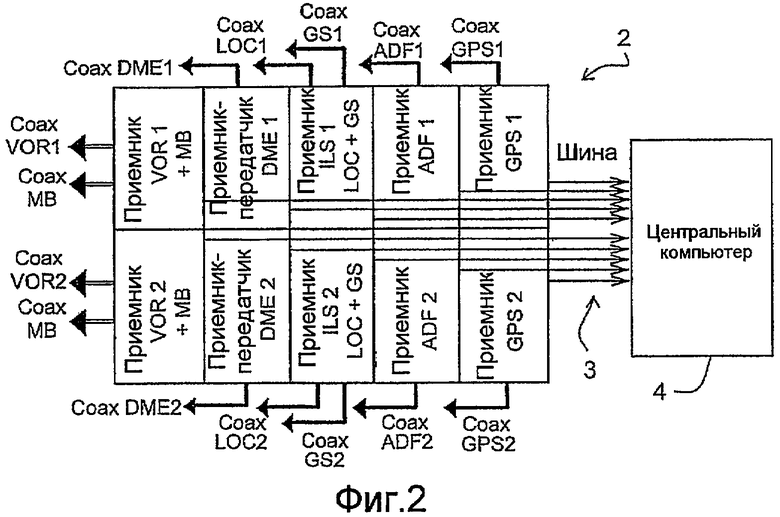
На чертеже схематично показана часть электронной стойки 2, относящаяся к радионавигационному оборудованию. В состав этого оборудования входят: приемники VOR-1 и 2, передатчики-приемники DME-1 и 2, приемники ILS-LOC и GS 1 и 2, приемники ADF 1 и 2, приемники GPS 1 и 2. Цифровые интерфейсы (не показаны) этих передатчиков и приемников соединены цифровой шиной 3 с центральным компьютером 4. Эти различные передатчики и приемники соединены коаксиальными кабелями (обозначенными на чертеже “coax”) с соответствующими антеннами.
Обработка навигационных сигналов приемниками происходит, кроме всего прочего, в виде визуальной индикации (шкалы, экраны, счетчики, лампочки) и звуковой индикации (закодированные сигналы Морзе, передаваемые маяками и представляющие собой их сигнатуры).
Недостатком этой архитектуры является то, что электронная стойка занимает много места, и что через летательный аппарат проходит большое количество коаксиальных кабелей, которые сами занимают большой объем и имеют большую массу. Кроме того, эти кабели являются дорогостоящими, так как их выбирают для минимизации потерь при передаче информации и обеспечения высокоэффективной экранирующей защиты от электромагнитных возмущений.
Проблему частично можно решить путем замены коаксиальных кабелей на оптоволоконные линии связи, что, хотя и позволяет уменьшить вес и объем кабелей, не решает проблемы объема электронной стойки и требует установки компонентов, уровень интеграции которых мало изучен в области авиации.
Другим фактором, оказывающим влияние на вес, является то, что каждый приемник в настоящее время имеет свой собственный источник питания, то есть электрический преобразователь постоянного напряжения в постоянное, позволяющий получать из энергии, производимой летательным аппаратом (19/37 Впост), все необходимые для работы значения постоянного напряжения (±10 В, ±15 В, ±5 В, 3,3 В).
Объектом настоящего изобретения является архитектура бортового электронного оборудования, содержащего систему обеспечения воздушной навигации и, в случае необходимости, систему датчиков величин, внешних по отношению к летательному аппарату, и систему связи, причем эту архитектуру используют в летательном аппарате, содержащем несколько антенн и датчиков, соединенных с бортовыми приборами летательного аппарата, причем эти антенны и датчики установлены в разных местах, распределенных по его наружной поверхности, при этом упомянутая архитектура должна позволить уменьшить вес и/или габариты кабелей, соединяющих антенны и датчики с соответствующими приборами, а также вес и/или габариты, по меньшей мере, части упомянутых приборов.
Архитектура в соответствии с настоящим изобретением отличается тем, что, по меньшей мере, часть передатчиков и/или приемников выносят ближе к соответствующим антеннам, и тем, что эти вынесенные передатчики и/или приемники соединены линиями цифровой связи с компьютером электронной стойки.
Предпочтительно, по меньшей мере, часть силового питания приборов летательного аппарата поступает от централизованного источника питания, и этот централизованный источник питания распределяет между вынесенными приборами стабилизированный постоянный ток.
Настоящее изобретение будет более очевидно из нижеследующего подробного описания, представленного в качестве неограничительного примера, со ссылками на прилагаемые чертежи, на которых:
Фиг.1 (уже описана выше) - упрощенная схема примера расположения антенн классического гражданского летательного аппарата.
Фиг.2 (уже описана выше) - частичная блок-схема стойки электронного оборудования летательного аппарата, показанного на фиг.1.
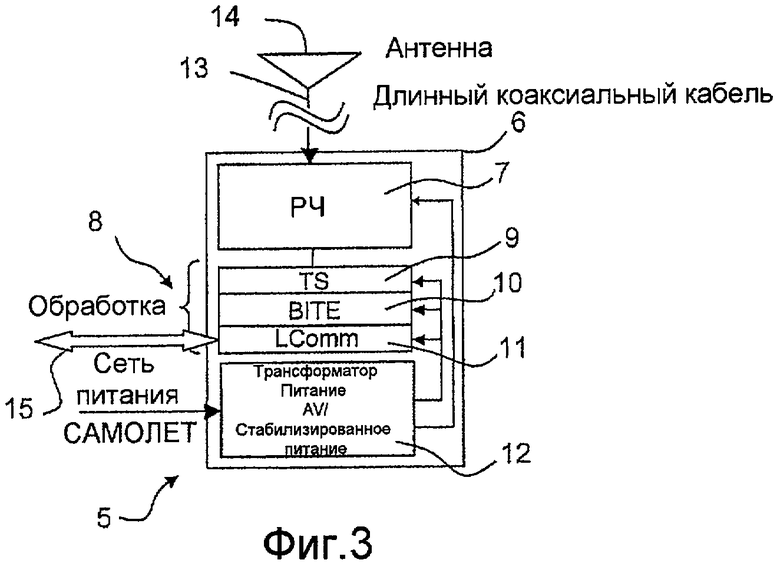
Фиг.3 - упрощенная блок-схема классического приемника летательного аппарата.
Фиг.4 - упрощенная блок-схема приемника, аналогичного показанному на фиг.3, но измененного в соответствии с настоящим изобретением.
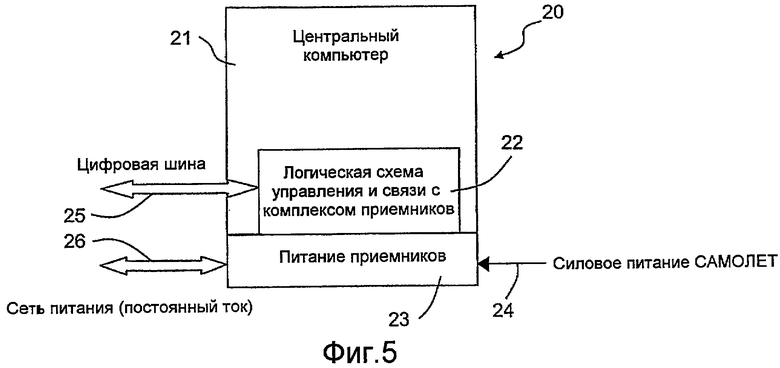
Фиг.5 - упрощенная блок-схема стойки приборов летательного аппарата в соответствии с настоящим изобретением.
Фиг.6 - очень упрощенная схема части радионавигационного оборудования летательного аппарата из предшествующего уровня техники.
Фиг.7 - очень упрощенная схема части радионавигационного оборудования летательного аппарата в соответствии с настоящим изобретением.
Решение в соответствии с настоящим изобретением состоит в перемещении, по меньшей мере, части приемников в антенны или рядом с ними. Эти приемники сообщаются с центральным навигационным компьютером через линию цифровой связи, которая имеет массу и объем, ничтожные по сравнению с коаксиальными кабелями. В некоторых случаях этот выигрыш в весе может достигать примерно 90%.
Таким образом, в электронной стойке высвобождается значительная часть объема, так как именно радиочастотная часть РЧ приемников (первый каскад приемников на выходе антенны) обычно занимает самый большой объем. Это позволяет также упростить конструкцию приемников, так как, поскольку они больше не прилегают друг к другу, снижается опасность взаимного создания помех.
Если вынести все передатчики/приемники, электронная стойка будет содержать только центральный компьютер, который сообщается через цифровую шину со всеми вынесенными приемниками, управляет ими, управляет поступающими от них данными для передачи в кабину экипажа необходимого для него комплекса информации.
Согласно другому отличительному признаку настоящего изобретения источник силового питания централизуют для распределения питания стабилизированным постоянным током между приемниками. Действительно, источник питания современных приемников занимает в них существенный объем и требует специальной защиты, чтобы его работа не мешала работе остальной части приемника. Следовательно, это тоже позволяет уменьшить общий объем и массу.
На фиг.3 показана блок-схема классического приемника 5, установленного в электронной стойке, такой как стойка 2. В основном этот приемник 5 содержит в экранированном корпусе 6: усилительный каскад РЧ 7, цифровые схемы 8 обработки (включая схему 9 обработки сигнала, а также схему 10 BITE (Built-in Test Equipment - встроенный прибор тестирования) и логическую схему 11 управления и контроля) и схему 12 силового питания, содержащую трансформатор и цепи стабилизированного питания. Усилительный каскад 7 соединен коаксиальным кабелем 13, как правило, большой длины (несколько десятков метров) с антенной 14. Схемы 8 соединены через цифровую шину с центральным компьютером (таким как компьютер 4, показанный на фиг.2).
Кроме того, в некоторых случаях (приемники ILS, VOR и DME) аналоговый выход аудиосхемы 9 соединен обычным экранированным кабелем 9А с аудиосхемами кабины экипажа.
Согласно изобретению, как показано на фиг.4, приемник, показанный на фиг.3, помещен в шкаф 16 в непосредственной близости от антенны 14 и модифицирован следующим образом. На фиг.4 элементы, идентичные элементам, показанным на фиг.3, обозначены теми же цифровыми позициями. Шкаф 16 содержит усилительный каскад РЧ 7, схемы 8 цифровой обработки и цепь 17 распределения питания постоянным током (содержащую, например, преобразователи постоянного напряжения в постоянное) для питания схем 7 и 8, при этом весь комплекс является менее объемным и намного менее тяжелым, чем в случае классических приемников, таких как приемник, схематично показанный на фиг.3. Цепь 17 соединена обычным экранированным кабелем 18 с общей цепью питания (описана ниже со ссылками на фиг.5) стабилизированным постоянным током электронной стойки летательного аппарата (стойка, аналогичная стойке 2, показанной на фиг.1). В отличие от случая, представленного на фиг.3, схемы 8А цифровой обработки содержат только схему 9 обработки сигнала и схему 10 BITE, при этом логическая схема 11 приемника, показанного на фиг.3, заменена центральной логической схемой, описание которой со ссылками на фиг.3 следует ниже. Как и в случае фиг.3, схемы 8А соединены цифровой шиной 15 с центральным компьютером. Усилительный каскад РЧ 7 соединен очень коротким кабелем 19 (например, длиной в несколько сантиметров или в несколько десятков сантиметров) с антенной 14. Предпочтительно цифровая шина 15 может быть оптической шиной.
В варианте вынесенные приемники могут быть встроены в антенны (которые в этом случае представляют собой “интеллектуальные антенны”). В настоящее время антенну такого типа защищают куполом, закрепленным на “обшивке” летательного аппарата снаружи, и соединяют очень коротким кабелем (например, длиной в несколько сантиметров) с децентрализованным модулем INM (Integrated Navigation Module - встроенный навигационный модуль), расположенным внутри обшивки летательного аппарата в непосредственной близости от нее, причем этот модуль соединен цифровой шиной с соответствующим централизованным приемником.
На фиг.5 схематично показан пример выполнения части электронной стойки летательного аппарата, относящейся к радионавигации и к датчикам величин, внешних по отношению к летательному аппарату, причем эта часть стойки формируется в результате трансформации всех приемников в соответствии с настоящим изобретением (эти приемники являются такими же, как приемник, показанный на фиг.4). Эта стойка 20 в основном содержит центральный компьютер 21, центральную логическую схему 22 управления и связи с комплексом вынесенных приемников и устройство 23 централизованного питания вынесенных приемников. Логическая схема 22 соединена через цифровую шину 25 со всеми вынесенными приемниками. Через кабель 24 устройство 23 питания получает силовое питание от главного источника энергии летательного аппарата и направляет через магистраль 26 стабилизированный постоянный ток на все вынесенные приемники. Таким образом, существенно уменьшается объем и вес устройства питания энергией радионавигационных приемников за счет того, что индивидуальные устройства питания приемников (которые для каждого централизованного приемника содержали свой собственный источник стабилизированного питания и свой собственный трансформатор) заменены единым устройством питания для всех вынесенных приемников. Кроме того, снижаются риски возмущений, которые создавали устройства (12) питания приемников согласно предшествующего уровня техники.
На фиг.6 и 7 соответственно показано различие между известным радионавигационным оборудованием и оборудованием в соответствии с настоящим изобретением.
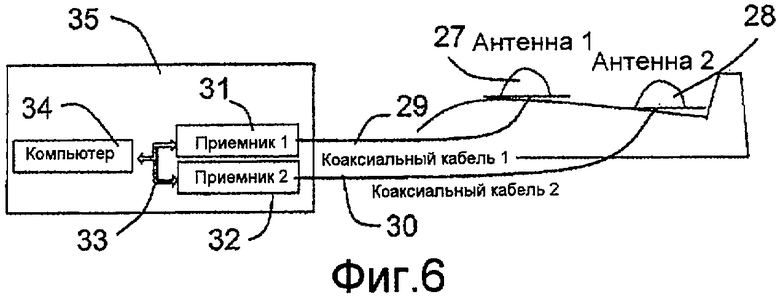
На фиг.6 показаны только две антенны 27 и 28 (и, в частности, обтекатели, закрывающие эти антенны) радионавигационной системы, причем эти антенны соединены соответственно индивидуальными коаксиальными кабелями 29, 30 с соответствующим индивидуальным приемником 31, 32. Цифровые выходы этих приемников соединены через шину 33 с компьютером 34 стойки 35 (которая может быть стойкой 2, показанной на фиг.1) летательного аппарата. Как было указано выше, недостатком этой известной архитектуры является необходимость в наличии такого же числа коаксиальных кабелей, как и количество антенн (или датчиков физических величин), которое может быть большим, как схематично показано на фиг.1. Обычно кабели 29 и 30 имеют большую длину и, следовательно, существенно увеличивают вес летательного аппарата.
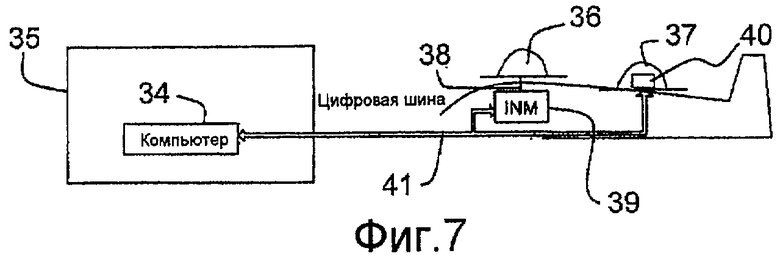
На фиг.7 схематично показана архитектура в соответствии с настоящим изобретением с двумя разными вариантами выполнения приемников и соответствующих антенн, показанными на одном чертеже. Эти антенны вместе со своими обтекателями обозначены позициями 36, 37. Антенна 36 соединена очень коротким коаксиальным кабелем 38 (например, длиной около десяти сантиметров) с приемником 39, в данном случае INM (Integrated Navigation Module - интегрированный навигационный модуль), находящимся внутри обшивки летательного аппарата в непосредственной близости от нее, и данным приемником является приемник, показанный на фиг.4. Антенна 37 является антенной с встроенным приемником, то есть связанный с ней приемник 40 (имеющий архитектуру приемника, показанного на фиг.4) встроен в обтекатель антенны. Разумеется, это возможно, только если приемник 40 предусмотрен для работы при очень низких температурах, таких как температуры воздуха на большой высоте, например, порядка -60°С. Разумеется, летательный аппарат должен быть оборудован либо приемниками типа приемника 39, либо типа приемника 40.
Все приемники радионавигационной системы, такие как приемник 39 (или 40), соединены с цифровой шиной 41, которая, в свою очередь, соединена с логической управляющей схемой компьютера 34 стойки 35, и эта логическая схема и компьютер показаны, например, на фиг.5, а стойка 35 аналогична стойке 2, показанной на фиг.1.
Таким образом, можно отметить, что архитектура, показанная на фиг.7, отличается меньшей сложностью, чем классическая архитектура, показанная на фиг.6, и в первую очередь намного меньшим весом и габаритами, чем классическая архитектура, в частности, за счет использования цифровых шин вместо коаксиальных кабелей.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТЕННА И РЕШЕТКА ГЛИССАДЫ ДЛЯ СИСТЕМЫ ПОСАДКИ И ТОЧНОГО ЗАХОДА НА ПОСАДКУ НЕБОЛЬШИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2020 |
|
RU2796476C1 |
| БОРТОВАЯ СИСТЕМА СОДЕЙСТВИЯ ПИЛОТИРОВАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, ОСНОВАННАЯ НА СИСТЕМЕ GNSS, ИМЕЮЩАЯ ИЗБЫТОЧНУЮ И НЕСХОДНУЮ АРХИТЕКТУРУ ДЛЯ ПОВЫШЕННОГО УРОВНЯ ДОСТОВЕРНОСТИ | 2013 |
|
RU2621827C2 |
| СПОСОБ И КОМПЛЕКСНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ АВИАЦИОННЫМИ СИСТЕМАМИ НАБЛЮДЕНИЯ И НАВИГАЦИИ | 2020 |
|
RU2799550C1 |
| НАЗЕМНАЯ ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ АЭРОПОРТА И РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2115141C1 |
| Система обнаружения и противодействия беспилотным воздушным судам | 2023 |
|
RU2809997C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| РАДИОСИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2564434C2 |
| МАГИСТРАЛЬНАЯ СЕТЬ ОПТИЧЕСКОЙ СВЯЗИ ДЛЯ БОРТОВОГО ОБОРУДОВАНИЯ | 2006 |
|
RU2428726C2 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
Изобретение касается распределенной архитектуры для комплекса средств обеспечения воздушной навигации и предназначено для уменьшения веса и/или габаритов кабелей, соединяющих антенны с соответствующими приборами. Существо предложения заключается в том, что, по меньшей мере, часть приемников вынесены на расстояние от нескольких сантиметров до нескольких десятков сантиметров к соответствующим антеннам, и, по меньшей мере, часть силового питания приборов летательного аппарата обеспечивается от централизованного источника, и это питание стабилизированным постоянным током от централизованного источника распределяется между вынесенными приборами. 3 з.п. ф-лы, 7 ил.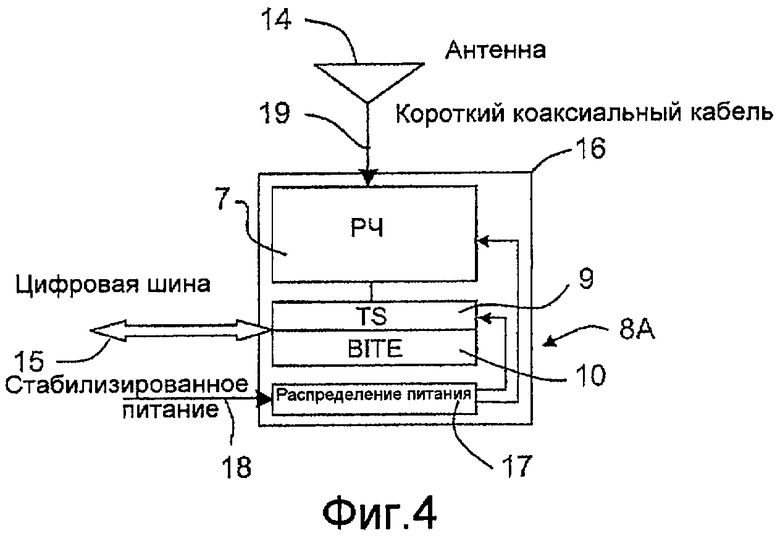
1. Распределенная архитектура для комплекса средств обеспечения воздушной навигации летательного аппарата, отличающаяся тем, что, по меньшей мере, часть передатчиков и/или радионавигационных приемников (39, 40) вынесены на расстояние от нескольких сантиметров до нескольких десятков сантиметров к соответствующим антеннам (14, 36, 37), причем эти вынесенные передатчики и/или радионавигационные приемники соединены линиями (15, 25, 41) цифровой связи с компьютером (21) на электронной стойке (35) летательного аппарата.
2. Архитектура по п.1, отличающаяся тем, что, по меньшей мере, часть силового питания приборов летательного аппарата поступает от централизованного источника (23) питания, и этот централизованный источник питания распределяет (26) между вынесенными приборами питание стабилизированным постоянным током.
3. Архитектура по п.1 или 2, отличающаяся тем, что линии цифровой связи являются оптическими шинами.
4. Архитектура по п.1 или 2, отличающаяся тем, что, по меньшей мере, часть передатчиков и/или радионавигационных приемников (40) встроена в соответствующую антенну (37).
| НАДПАЛУБНЫЙ БЛОК ДЛЯ АВТОМАТИЧЕСКОЙ СИСТЕМЫ ОПОЗНОВАНИЯ | 2001 |
|
RU2257675C2 |
| Способ выделения ацетона и уксусной кислоты из кубового остатка производства уксусного ангидрида | 1978 |
|
SU789502A1 |
| Гвоздев В.И | |||
| и др | |||
| Объемные интегральные схемы СВЧ, Москва, Наука, 1985, с.211, 212, рис.6.17 | |||
| АВТОМОБИЛЬНАЯ МОБИЛЬНАЯ ЛАБОРАТОРИЯ ДЛЯ ИССЛЕДОВАНИЯ СКВАЖИН | 2022 |
|
RU2788922C1 |
| Клапан предохранительный | 2022 |
|
RU2787658C1 |
| Способ и механическое устройство совместного движения поршней в двухпоршневом двигателе | 2023 |
|
RU2819964C1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

