Группа изобретений относится к области транспорта, а именно к системам управления транспортными средствами при движении по поверхности.
Из уровня техники известны способы улучшения управляемости и снижения перегрузки или динамической нагруженности транспортного средства при движении по поверхности и системы управления шасси транспортного средства, реализующие эти способы.
Так, в заявке Германии №102008040240, МПК B60W 30/02; B60W 40/02; B60W 40/10, дата публикации 14.01.2010 г. [1], представлены способ и система электронного управления для активной коррекции динамических и скоростных характеристик транспортного средства, основанный на регулировании углов установки колес шасси транспортного средства по результатам измерения текущих параметров движения транспортного средства с учетом его динамических особенностей. Недостатком данного способа управления для решения задачи снижения динамической нагруженности (перегрузок) транспортных средств состоит в том, что управление осуществляется по результатам соответствующей обработки измерений только текущих параметров движения транспортного средства. При этом присущее исполнительным органам запаздывание в отработке сигналов управления ограничивает возможности снижения нагрузок при встрече с неровностями пути.
Изобретение [1] принято в качестве наиболее близкого аналога заявленного способа.
Известен самолет (Техническая информация ЦАГИ №11-12, 1979 год, [2]), содержащий фюзеляж, крыло, шасси с носовой и основными стойками, выполненными в виде тележек с колесами шасси и соединенные с планером самолета посредством амортизаторов с переменной жесткостью, силовую установку и систему управления. Недостатком данного технического решения является значительное запаздывание при отработке сигнала управления характеристиками амортизационных стоек, что ограничивает возможности снижения перегрузок самолета.
Транспортное средство, представленное в Технической информации [2], принято в качестве наиболее близкого аналога транспортных средств, реализующих способ.
Задачей изобретения является снижение перегрузок транспортного средства при движении по неровной поверхности.
Технический результат изобретения состоит в своевременном формировании оптимальных параметров амортизационной системы при движении по поверхности. Технический результат состоит также в повышении проходимости самолета по поверхности с низкой несущей способностью.
Технический результат достигается тем, что в способе снижения динамической нагруженности транспортного средства при движении по поверхности, основанном на регулировании жесткости и демпфирования установленного на транспортном средстве амортизирующего устройства посредством подачи на него управляющего сигнала, измеряют реакцию модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на заданные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производных по времени, заносят реакции модели в блок памяти, блок памяти с реакциями модели устанавливают на транспортном средстве, сканером сканируют характеристики поверхности в направлении движения транспортного средства, сигнал со сканера с характеристиками поверхности передают в блок памяти с реакциями модели, производят сравнение характеристики поверхности с имеющимися в блоке памяти типами рельефа поверхности и реакцией модели на аналогичные характеристики поверхности, выбирают лучший вариант управления амортизирующим устройством, сравнивают лучший вариант управления с измеренными пространственными и угловыми координатами транспортного средства, их первыми и вторыми производными, после чего формируют и подают управляющий сигнал на амортизирующее устройство транспортного средства.
Технический результат достигается также тем, что в транспортном средстве, содержащем корпус, амортизационное устройство, систему управления жесткостью и демпфированием амортизационного устройства, система управления оснащена блоком памяти, содержащим информацию о реакции модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на характерные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производных по времени, сканером, блоком сравнения характеристики поверхности с имеющимися в блоке памяти типами рельефа поверхности и реакцией модели транспортного средства на аналогичные характеристики поверхности, блоком измерения координат пространственного положения транспортного средства и производных координат по времени, блоком формирования управляющего сигнала, подаваемого на амортизирующее устройство транспортного средства.
Технический результат достигается также тем, что транспортное средство выполнено в виде летательного аппарата, а амортизирующее устройство выполнено в виде колесного шасси с регулируемыми характеристиками жесткости и демпфирования.
Технический результат достигается также тем, что шасси соединено с корпусом посредством амортизационных стоек, которые оснащены электромагнитным амортизатором.
Технический результат достигается также тем, что транспортное средство выполнено в виде наземной машины, а амортизирующее устройство - в виде регулируемой подвески с переменной жесткостью и демпфированием.
Технический результат достигается также тем, что транспортное средство выполнено в виде аппарата на воздушной подушке, а амортизирующее устройство - в виде регулируемой системы формирования воздушной подушки.
Технический результат достигается также тем, что транспортное средство выполнено в виде гидросамолета, а амортизирующее устройство выполнено в виде управляемых интерпепторов, установленных на корпусе гидросамолета.
Кроме того, технический результат достигается тем, что в самолете, содержащем фюзеляж, крыло, шасси с носовой и основными стойками, выполненными в виде тележек с колесами шасси и соединенными с планером самолета посредством амортизаторов, силовую установку и систему управления, основные стойки шасси установлены на фюзеляже и на крыле, амортизирующее устройство, по меньшей мере, одной основной стойки содержит, по меньшей мере, одну дополнительную секционированную пневмокамеру, оснащенную пневмоклапаном с регулируемыми дроссельными отверстиями, а система управления оснащена блоком памяти, содержащим информацию о реакции модели самолета с разными характеристиками жесткости и демпфирования амортизирующего устройства на заданные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производной по времени, сканером, блоком сравнения характеристики поверхности с имеющимися в блоке памяти типами рельефа поверхности и реакцией модели самолета на аналогичные характеристики поверхности, блоком измерения координат пространственного положения самолета и производных координат по времени, и блоком формирования сигнала для регулирования площади сечения дроссельных отверстий пневмоклаланов пневмокамер и дроссельных отверстий демпфирующего устройства амортизатора.
Кроме того, технический результат достигается тем, что в самолете, по меньшей мере, одна пара основных стоек шасси оснащена механизмом уборки в гондолу двигателей, а другие основные стойки шасси оснащены механизмом их уборки в наплывы фюзеляжа.
При этом тяговооруженность самолета составляет не менее 0,40.
Изобретение поясняется чертежами.
На фиг.1 представлена блок-схема управления установленным на транспортном средстве амортизатором с регулируемой жесткостью.
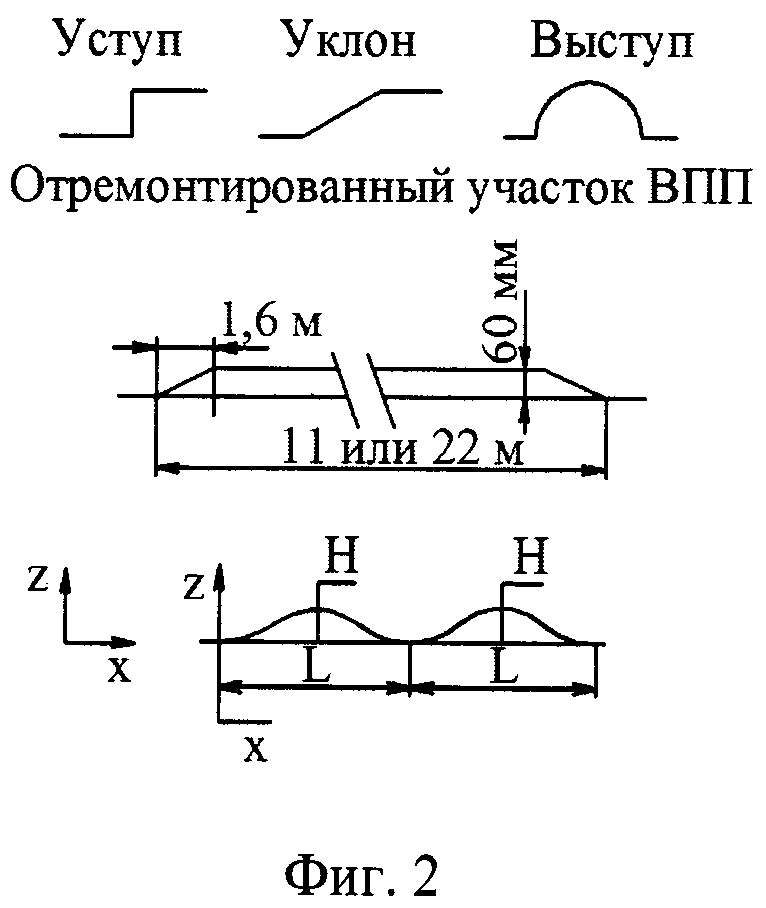
На фиг.2 представлены типы неровностей, характерные для поверхности перемещения транспортного средства.
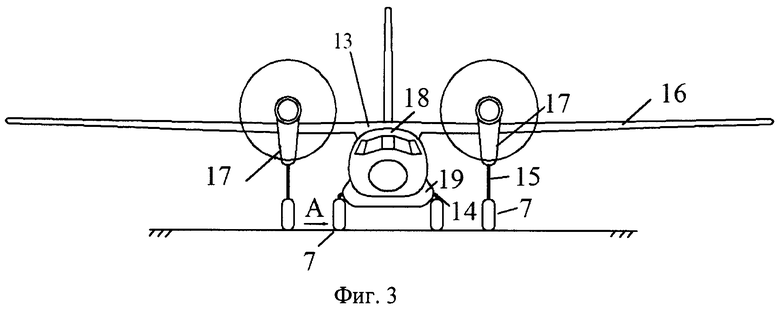
На фиг.3 показан общий вид самолета.
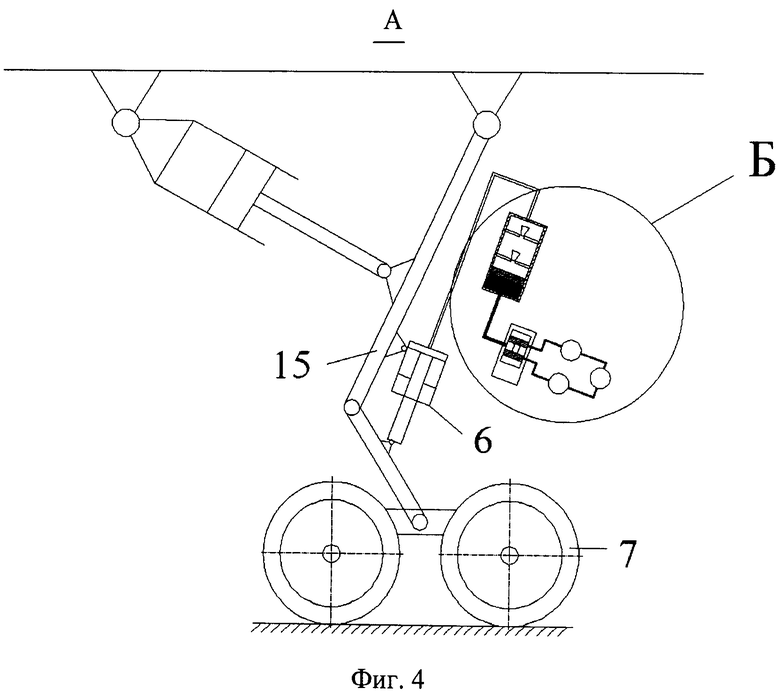
На фиг.4 представлен вид А на фиг.3.
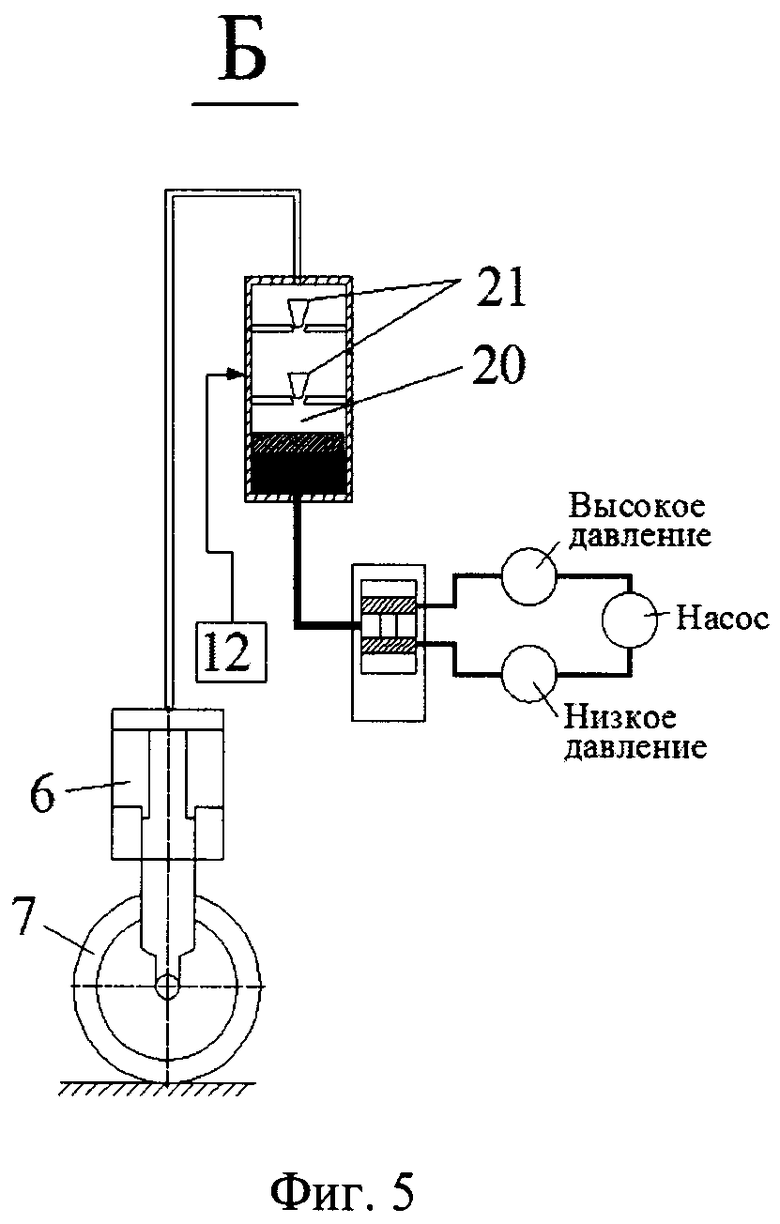
На фиг.5 представлен выносной элемент Б на фиг.4.
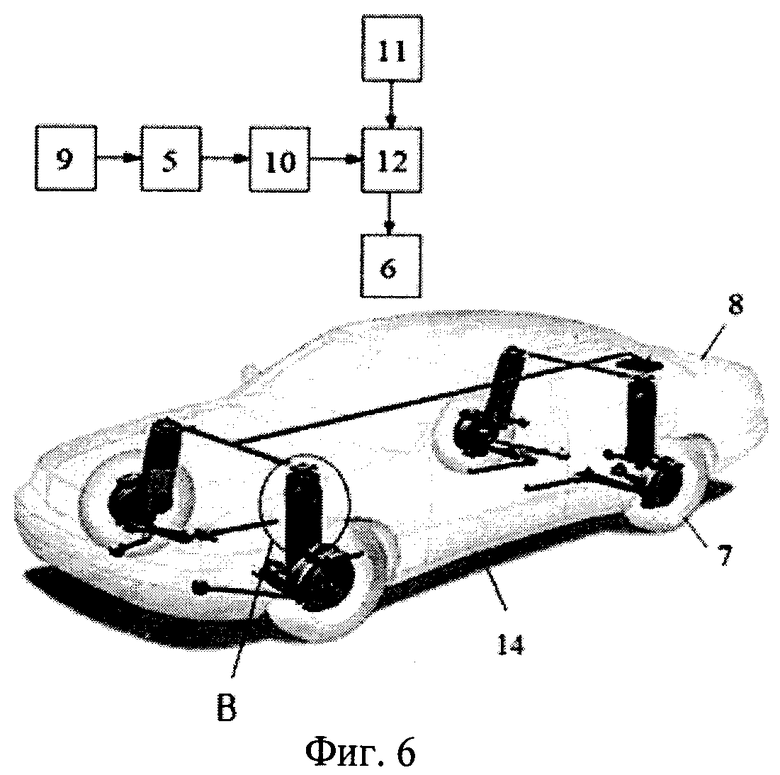
На фиг.6 представлен общий вид транспортного средства.
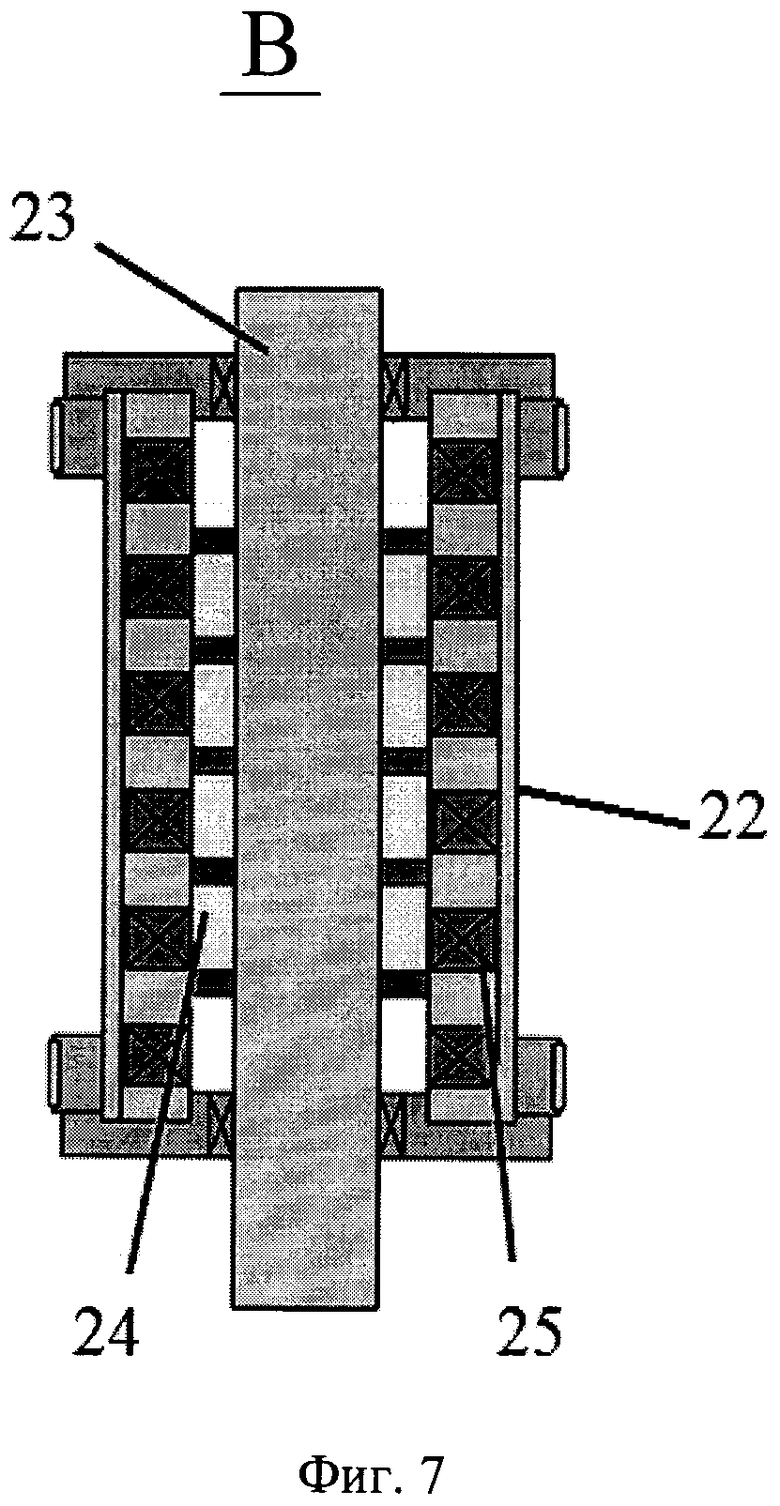
На фиг.7 показан выносной элемент В на фиг.6.
Предлагаемый способ управления осуществляется по результатам обработки одновременно текущих значений параметров движения транспортного средства (поступательных и угловых перемещений, скоростей и перегрузок) и его динамической реакции на проезд неровностей, расположенных перед ним и измеряемых сканирующим устройством, которые он будет проезжать через некоторый отрезок времени.
Для реализации способа предварительно создают модель 1 транспортного средства 2 с моделированием жесткости и демпфирования шасси 3, соединенного с корпусом 4 (фиг.1). Модель 1 транспортного средства 2 может выполняться как физической, так и математической, обеспечивающей верификацию результатов расчета с физическим экспериментом, и физического эксперимента с динамическими характеристиками транспортного средства 2. Затем проводят испытания модели 1 при разных параметрах жесткости и демпфирования шасси 3, соединенного с корпусом 4, при движении над разными типами неровностей, в частности, представленными на фиг.2. Результаты реакции модели 1 в процессе преодоления неровностей записывают в электронный блок 5 памяти. При этом в качестве регистрируемых параметров модели 1 записывают следующие реакции модели 1 с фиксированной жесткостью: пространственное положение модели по координатам и углам X, Y, Z, α, β, γ, их первые и вторые производные по времени: dX/dt; dY/dt; dZ/dt; dα/dt; dβ/dt; dγ/dt и d2X/dt2; dY2/dt2; d2Z/dt2; d2α/dt2; βd2/dt2; d2γ/dt2.
Затем блок 5 памяти размещают на транспортном средстве 2, оснащенном амортизационными стойками 6 с регулируемой жесткостью и демпфированием шасси 7, соединенного с корпусом 8 транспортного средства 2, а на транспортное средство 2 устанавливают сканер 9 поверхности, расположенной перед транспортным средством 2 в направлении его движения, блок 10 сравнения, блок 11 со средствами измерения параметров движения транспортного средства, в том числе координат углового и пространственного положения, их первых и вторых производных по времени, и блок 12 формирования управляющего сигнала, по меньшей мере, на одну амортизационную стойку 6 шасси 7 с регулируемой жесткостью.
Блок-схема управления жесткостью и демпфированием амортизационных стоек 6, представленная на фиг.1, реализует описанный выше способ управления жесткостью и демпфированием амортизационных стоек 6, соединяющих колеса шасси 7 с корпусом 8 транспортного средства 2.
При движении по поверхности транспортного средства 2, например самолета, оборудованного сканером 9 неровностей поверхности, сканируют рельеф поверхности в направлении движения транспортного средства 2, результаты сканирования передают в электронный блок 5 памяти с информацией о реакции на набор характерных неровностей модели 1 транспортного средства 2 с разной жесткостью и демпфированием соединения шасси 3 с корпусом 4 модели 1. Затем в блоке 10 сравнения сопоставляют результаты сканирования рельефа поверхности с реакцией модели 1 при ее движении по типовой поверхности с аналогичным рельефом при разных параметрах жесткости и демпфирования амортизационных стоек 6, и выбирают параметры жесткости и демпфирования амортизационной стойки 6, при которых первые и вторые производные пространственного положения транспортного средства 2 не превосходят заданных параметров движения (например, имеют минимальные величины скоростей и ускорений по высоте). Данные из блока 10 сравнения и блока 11 средств изменения параметров движения транспортного средства 2 направляют в блок 12 формирования управляющего сигнала, после чего управляющий сигнал передают на элементы регулирования жесткости и демпфирования амортизационных стоек 6.
Таким образом, реализуют управление жесткостью и демпфированием амортизационных стоек 6 и обеспечивают минимально возможные в конкретных условиях движения по неровной поверхности перегрузки транспортного средства 2.
В качестве транспортного средства 2 может использоваться самолет 13 (фиг.3), наземное транспортное средство 14 (фиг.6) повышенной проходимости, например аппарат на воздушной подушке, гидросамолет и другие транспортные средства, оснащенные амортизационными стойками 6 с регулируемой жесткостью и демпфированием, сканером 9, блоками 5, 10, 11, 12 соответственно памяти, сравнения, средств измерения параметров движения и формирования управляющего сигнала. В качестве амортизирующего устройства могут использоваться амортизационные стойки 6 колесного шасси с регулируемыми характеристиками жесткости и демпфирования (для наземных транспортных средств повышенной проходимости), регулируемой системы формирования воздушной подушки (для аппаратов на воздушной подушке), в виде управляемых интерцепторов (для гидросамолетов) и т.п.
При использовании в качестве транспортного средства 2 самолета 13, как показано на фиг.3, самолет 13 оснащается второй парой основных стоек 15 шасси 7. При этом одна пара основных стоек 15 шасси 7 соединена с крылом 16 и оснащена механизмом их уборки в гондолы 17. В предпочтительном варианте гондолы 17 совмещаются (являются продолжением) гондолы двигателей, установленных на крыле 16. Другие основные стойки 15 шасси 7 соединены с фюзеляжем 18 и убираются в ниши фюзеляжа 18, выполненные, например, в виде наплывов 19. При этом тяговооруженность самолета 13, равная отношению тяги двигателей на старте к взлетному весу самолета 13, составляет не менее 0,4, основные стойки 15 шасси 7 содержат амортизационные стойки 6, дополнительно оснащенные пневмокамерами 20 с регулируемыми пневноклапанами 21 и дроссельными отверстиями демпфирующего устройства амортизатора (фиг.4, 5). На самолете 13 установлены: сканер 9 поверхности, блок 5 памяти с информацией о реакции модели 1 самолета 13 на разные типы неровностей при разных характеристиках жесткости и демпфирования шасси 3, соединенного с корпусом 4 модели 1 самолета 13, а также блок 10 сравнения измеренных параметров поверхности перед транспортным средством 2 с записанными в блоке 5 памяти, обеспечивающего наиболее близкий тип рельефа поверхности, блок 11 измерения параметров движения самолета 13 и блок 12 формирования управляющего сигнала на амортизационные стойки 6 шасси 7.
При реализации способа на наземном транспортном средстве 14 (фиг.6) амортизационные стойки 6 выполняются в виде электромагнитного амортизатора 22. На транспортном средстве 14 также устанавливают сканер 9 поверхности и блок 5 памяти с информацией о реакции модели 1 транспортного средства 14 на разные типы неровностей при разных характеристиках жесткости и демпфирования шасси 3, соединенного с корпусом 4 модели 1 транспортного средства 14, блок 10 сравнения, блок 11 измерения параметров движения транспортного средства 14 и блок 12 формирования управляющего сигнала на амортизационные стойки 6, выполненные в виде электромагнитного амортизатора 22.
Электромагнитный амортизатор 22 (фиг.7) содержит шток 23, обмотку металлической проволокой 24 и магниты 25, при этом шток 23 с обмоткой 24 выполнен с возможностью перемещения относительно магнитов 25. Магниты 25 могут выполняться в виде постоянных магнитов и электромагнитов. Перемещаясь относительно магнитов 25, шток 23 с обмоткой 24 работает как линейный электродвигатель. Такое выполнение электромагнитного амортизатора позволяет демпфировать колебания при взаимодействии шасси 7 с неровной поверхностью, а также регулировать жесткость при подаче на обмотку токов с разным напряжением, снижая таким образом перегрузки транспортного средства при движении по неровной поверхности.
Самолет 13 и транспортное средство 14 реализуют способ снижения нагруженности транспортного средства посредством регулирования жесткости и демпфирования амортизационной стойки 6. При этом наличие второй пары основных стоек 15 шасси 7 самолета 13 уменьшает нагрузку на поверхность, а увеличенная тяговооруженность обеспечивает выполнение взлета с поверхности аэродромов с пониженными несущими свойствами, создающими более высокое сопротивление движению при разбеге самолета 13. Это повышает проходимость самолета.
Предлагаемые технические решения, реализующие представленный способ, обладают достаточным быстродействием и, соответственно, эффективно снижают перегрузки при движении транспортного средства по неровной поверхности.
Представленный уровень раскрытия способа и устройств, реализующих способ, достаточен для разработки в специализированных организациях транспортных средств и его систем, использующих заявленный способ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СНИЖЕНИЯ ВЕРТИКАЛЬНЫХ И УГЛОВЫХ ПЕРЕГРУЗОК ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2014 |
|
RU2569235C1 |
| СПОСОБ СНИЖЕНИЯ ДИНАМИЧЕСКОЙ НАГРУЖЕННОСТИ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДВИЖЕНИИ ПО ПОВЕРХНОСТИ И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2603703C1 |
| Способ динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины транспортного средства | 2024 |
|
RU2828915C1 |
| СПОСОБ ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ ВЕСОВОЕ УСТРОЙСТВО | 2010 |
|
RU2422782C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
| Гусеничное транспортное средство | 1987 |
|
SU1507209A3 |
| СИСТЕМА ФОРМИРОВАНИЯ РЕЗЕРВНОЙ ИНФОРМАЦИИ О ПРОСТРАНСТВЕННОМ ПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2324623C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| Способ управления параметрами системы подрессоривания, повышающий эффективность торможения транспортного средства | 2018 |
|
RU2670342C1 |
| САМОХОДНОЕ ШАССИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2048348C1 |
Группа изобретений относится к способу снижения динамической нагруженности транспортного средства при движении по поверхности и транспортным средствам, реализующим этот способ. Способ заключается в том, что измеряют реакцию модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на заданные типы неровностей, заносят реакции модели в блок памяти. Блок памяти с реакциями модели устанавливают на транспортном средстве. Определяют при помощи сканера характеристики поверхности в направлении движения транспортного средства. Передают характеристики в блок памяти с реакциями модели. Производят сравнение характеристики поверхности с имеющимися в блоке памяти типами рельефа поверхности и реакцией модели на аналогичные характеристики поверхности. Выбирают лучший вариант управления амортизирующим устройством. Сравнивают лучший вариант управления с измеренными пространственными и угловыми координатами транспортного средства, их первыми и вторыми производными. Формируют и подают управляющий сигнал на амортизирующее устройство транспортного средства. Транспортное средство, в том числе и такое, как самолет, содержит систему, которая управляет узлами транспортного средства в соответствии с вышеуказанным способом. Технический результат заключается в снижении перегрузок транспортного средства при движении по неровной поверхности. 3 н. и 7 з.п. ф-лы, 7 ил.
1. Способ снижения динамической нагруженности транспортного средства при движении по поверхности, основанный на регулировании жесткости и демпфирования установленного на транспортном средстве амортизирующего устройства посредством подачи на него управляющего сигнала, отличающийся тем, что измеряют реакцию модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на заданные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производных по времени, заносят реакции модели в блок памяти, блок памяти с реакциями модели устанавливают на транспортном средстве, определяют при помощи сканера характеристики поверхности в направлении движения транспортного средства и передают их в блок памяти с реакциями модели, затем производят сравнение характеристики поверхности с имеющимися в блоке памяти типами рельефа поверхности и реакцией модели на аналогичные характеристики поверхности, выбирают лучший вариант управления амортизирующим устройством, сравнивают лучший вариант управления с измеренными пространственными и угловыми координатами транспортного средства, их первыми и вторыми производными, после чего формируют и подают управляющий сигнал на амортизирующее устройство транспортного средства.
2. Транспортное средство, содержащее корпус, амортизационное устройство, систему управления жесткостью и демпфированием амортизационного устройства, отличающееся тем, что система управления оснащена блоком памяти, содержащим информацию о реакции модели транспортного средства с разными характеристиками жесткости и демпфирования амортизирующего устройства на характерные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производных по времени, сканером, блоком сравнения характеристики поверхности с имеющимися в блоке памяти типами рельефа поверхности и реакцией модели транспортного средства на аналогичные характеристики поверхности, блоком измерения координат пространственного положения транспортного средства и производных координат по времени, блоком формирования управляющего сигнала, подаваемого на амортизирующее устройство транспортного средства.
3. Транспортное средство по п.2, отличающееся тем, что амортизирующее устройство выполнено в виде стоек, представляющих собой электромагнитный амортизатор.
4. Транспортное средство по п.2, отличающееся тем, что транспортное средство выполнено в виде летательного аппарата, а амортизирующее устройство выполнено в виде колесного шасси с регулируемыми характеристиками жесткости и демпфирования.
5. Транспортное средство по п.2, отличающееся тем, что транспортное средство выполнено в виде наземной машины, а амортизирующее устройство - в виде регулируемой подвески с переменной жесткостью и демпфированием.
6. Транспортное средство по п.2, отличающееся тем, что транспортное средство выполнено в виде аппарата на воздушной подушке, а амортизирующее устройство - в виде регулируемой системы формирования воздушной подушки.
7. Транспортное средство по п.2, отличающееся тем, что транспортное средство выполнено в виде гидросамолета, а амортизирующее устройство выполнено в виде управляемых интерцепторов, установленных на корпусе гидросамолета.
8. Самолет, содержащий фюзеляж, крыло, шасси с носовой и основными стойками, соединенными с планером самолета посредством амортизаторов, силовую установку и систему управления, отличающийся тем, что основные стойки шасси установлены на фюзеляже и на крыле, амортизирующее устройство, по меньшей мере, одной основной стойки, содержит, по меньшей мере, одну дополнительную секционированную пневмокамеру, оснащенную пневмоклапаном с регулируемыми дроссельными отверстиями, а система управления оснащена блоком памяти, содержащим информацию о реакции модели самолета с разными характеристиками жесткости и демпфирования амортизирующего устройства на заданные типы неровностей по координатам пространственного и углового положения модели и их первой и второй производной по времени, сканером, блоком сравнения характеристики поверхности с имеющимися в блоке памяти типами рельефа поверхности и реакцией модели самолета на аналогичные характеристики поверхности, блоком измерения координат пространственного положения самолета и производных координат по времени, и блоком формирования сигнала на регулирование дроссельных отверстий пневмоклапанов пневмокамер и дроссельных отверстий демпфирующего устройства амортизатора.
9. Самолет по п.8, отличающийся тем, что, по меньшей мере, одна пара основных стоек шасси оснащена механизмом уборки в гондолу двигателей, а другая пара основных стоек шасси оснащена механизмом их уборки в наплывы фюзеляжа.
10. Самолет по п.8 или 9, отличающийся тем, что тяговооруженность самолета составляет не менее 0,4.
| DE 102008040240 A1, 14.01.2010 | |||
| СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2395407C2 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| АКТИВНАЯ ПОДВЕСКА КОРПУСА ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2203812C2 |

