Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения сигнализационных средств охраны с линейной частью обрывного принципа действия (обрывных средств обнаружения) [1, 2].
Применение сигнализационных средств охраны увеличивает вероятность обнаружения нарушителей. Подразделения охраны широко используют на локальных участках местности относительно недорогие и простые в применении обрывные средства обнаружения. Во многом успех задержания нарушителя зависит от времени, затрачиваемого силами охраны на поиск места обрыва линейной части. Обрывные средства обнаружения имеют низкую точность обнаружения, равную длине развернутой линейной части (0,75-2 км), поэтому время, затрачиваемое на уточнение места нарушения, у них значительное [3, 4].
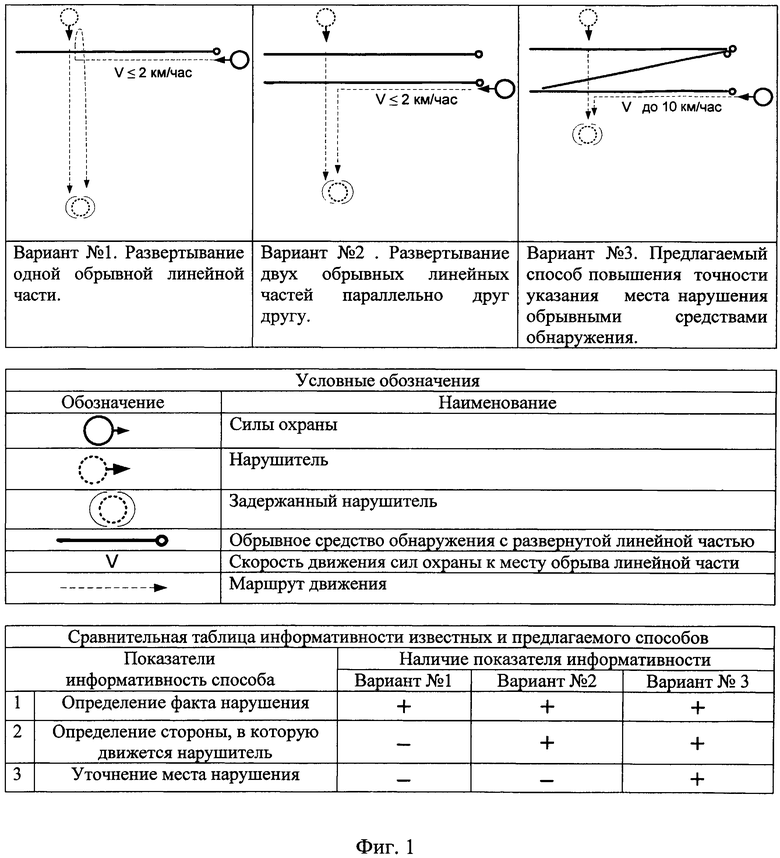
Известен способ применения обрывных средств обнаружения, заключающийся в развертывании обрывной линейной части поперек вероятного направления движения нарушителя. В случае получения сигнала об обрыве линейной части силы охраны, продвигаясь вдоль нее, визуальным осмотром определяют место обрыва, которое и является местом нарушения (фиг.1) [3, 4].
Также известен способ определения стороны, в которую движется нарушитель, заключающийся в развертывании на охраняемом рубеже двух обрывных линейных частей, расположенных параллельно друг другу на расстоянии 25-50 метров. Сторона, в которую движется нарушитель, определяется по очередности поступления сигнала тревоги от линейных частей (фиг.1).
Недостатками этих способов являются:
1. Значительная задержка во времени между получением сигнала о нарушении и определением места нарушения.
2. Необходимость привлечения дополнительных сил для визуального осмотра линейных частей обрывных средств обнаружения.
Целью изобретения является повышение эффективности применения обрывных средств обнаружения.
Для достижения поставленной цели разработан способ повышения точности указания места нарушения обрывными средствами обнаружения, заключающийся в аналитическом расчете места нарушения по регистрируемому времени задержки поступления сигналов тревоги от трех обрывных линейных частей, развернутых на местности как единый сигнализационный рубеж охраны с заданными геометрическими размерами.
В полосе местности, параллельно рубежу, на который ожидается выход нарушителя, развертывается сигнализационный рубеж охраны. В большинстве случаев, когда нарушителю необходимо преодолеть открытый участок местности для выхода на свой рубеж, он будет стремиться выйти на него по наикратчайшему пути, то есть по перпендикуляру (фиг.1). Правомерно допустить, что нарушитель, пересекая сигнализационный рубеж глубиной 50-100 метров, движется практически без ускорения [5, 6]. Отношение расстояний, пройденных им между тремя линейными частями, и отношение временных интервалов, затраченных на это, будут прямо пропорциональны:

где t1-2, t2-3 - интервалы времени, затраченные нарушителем для преодоления расстояний между соседними обрывными линейными частями, с;
S1-2, S2-3 - расстояния между соседними обрывными линейными частями по перпендикуляру к линейным частям №1, 2, пройденные нарушителем, м;
VH - скорость движения нарушителя через охранный рубеж, м/с.
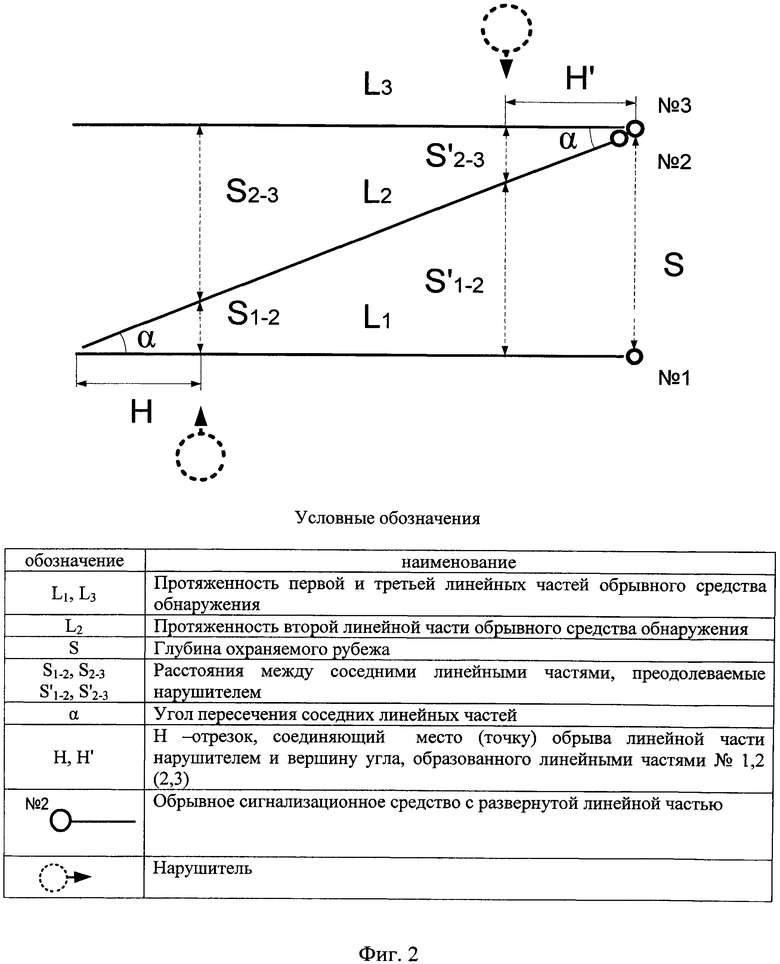
Геометрические размеры охранного рубежа задаются таким образом, чтобы отношения интервалов времени между нарушением первой - второй (t1-2) и второй - третьей (t2-3) линейных частей были различными и зависели от конкретного места нарушения (фиг.2) [7].
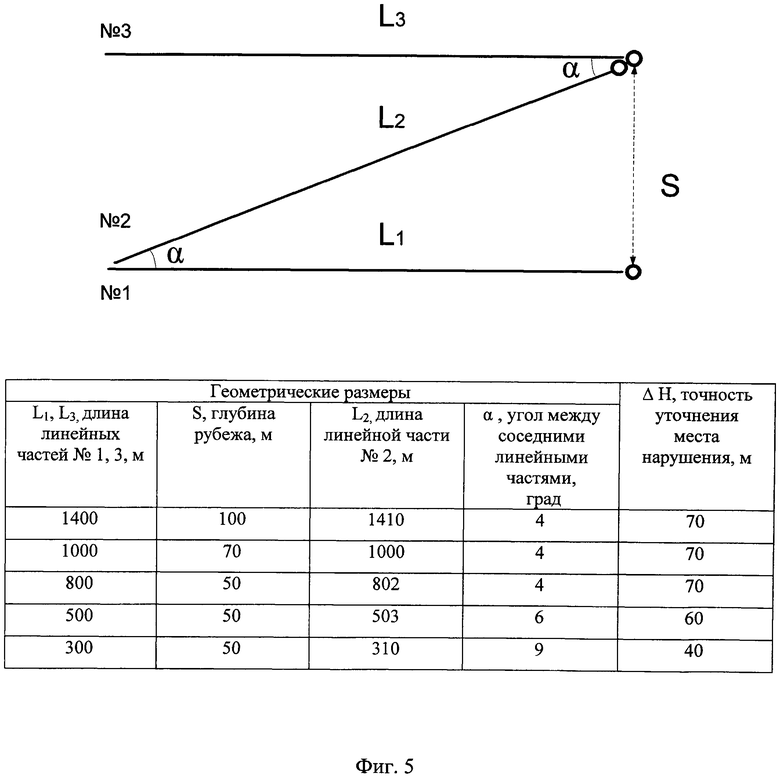
Для этого первая и третья (крайние) линейные части развертываются поперек возможного направления движения нарушителя параллельно друг к другу, а вторая линейная часть - между ними под углом 4-9 градусов. Зная отношение расстояний между соседними линейными частями по всей длине сигнализационного рубежа охраны, сравнив их с отношением измеренных временных интервалов, и учтя очередность срабатывания линейных частей, уточняется место нарушения.
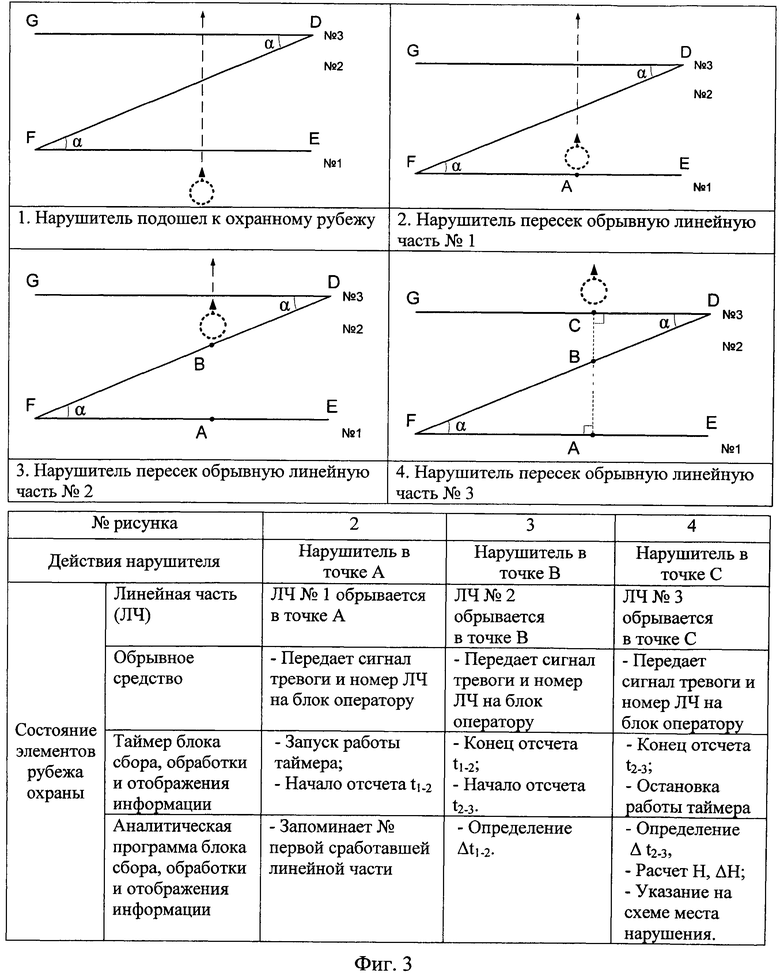
В случае, если нарушитель пересекает сигнализационный рубеж охраны, начиная движение со стороны линейной части №1, то временной интервал t1-2 регистрируется с момента поступления сигнала тревоги от линейной части №1 до момента поступления сигнала тревоги от линейной части №2. Временной интервал t2-3 регистрируется с момента поступления сигнала тревоги от линейной части №2 до момента поступления сигнала тревоги от линейной части №3 (фиг.3). После того как сигналы тревоги поступят от всех трех линейных частей, место обрыва рассчитывается по формуле:

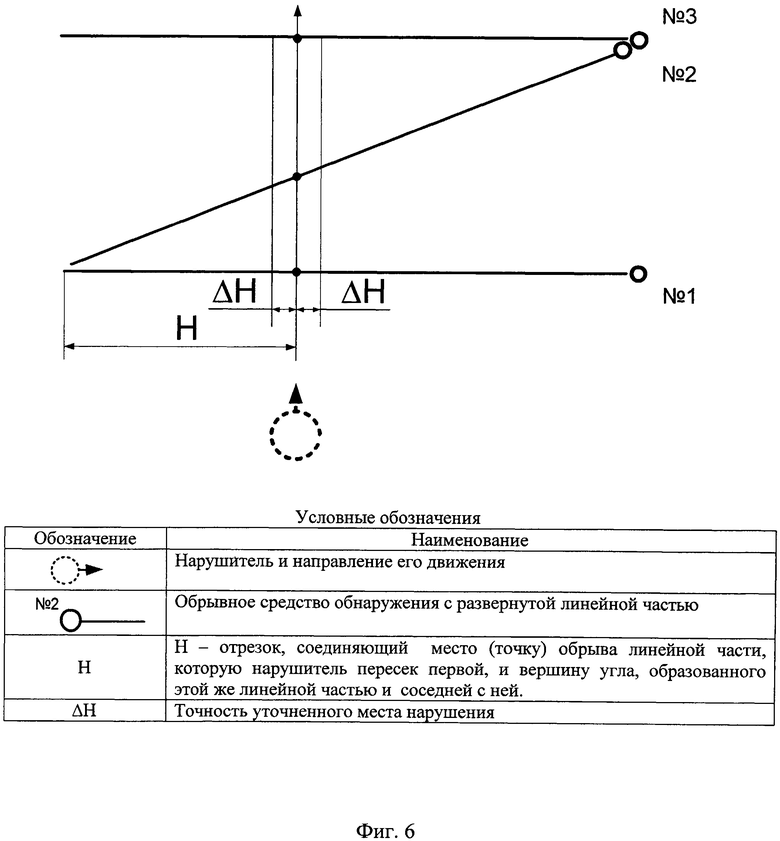
где Н - отрезок, соединяющий место (точку) обрыва линейной части нарушителем и вершину угла, образованного линейными частями №1, 2 (2, 3), м;
g - постоянный множитель, зависящий только от геометрических размеров охранного рубежа и рассчитываемый по формуле:

где S - расстояние между крайними (первой и третьей) линейными частями, м;
tgα - тангенс угла между соседними линейными частями.
k - отношение между первым и вторым интервалами времени, рассчитываемое по формулам:


В случае, если нарушитель пересекает сигнализационный рубеж, начиная движение со стороны линейной части №3, то временной интервал t3-2 регистрируется с момента поступления сигнала тревоги от линейной части №3 до момента поступления сигнала тревоги от линейной части №2. Временной интервал t2-1 регистрируется с момента поступления сигнала тревоги от линейной части №2 до момента поступления сигнала тревоги от линейной части №1. После того как сигналы тревоги поступят от всех трех линейных частей, место обрыва нарушителем линейной части рассчитывается по формуле (2).
Вычисленная длина отрезка Н откладывается на первой из сработавших линейных частей (№1 или №3) от угла ее пересечения с линейной частью №2. Через точку на конце отрезка откладывается перпендикуляр к линейным частям №1 и №3.
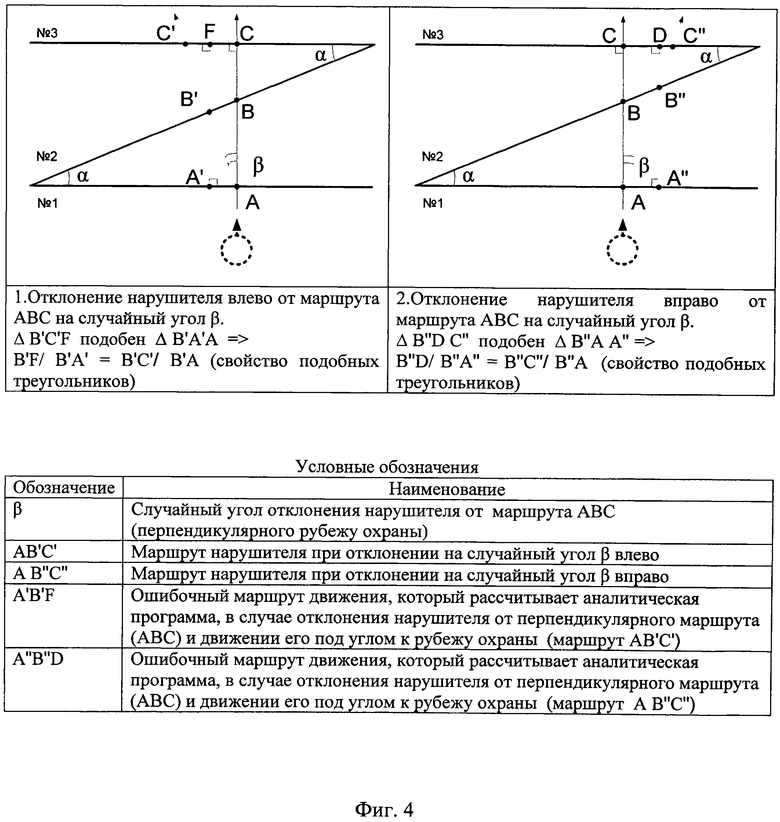
На точность способа влияет погрешность оценки действий нарушителя. Нарушитель не всегда пересекает охранный рубеж строго перпендикулярно. Неопределенность действий нарушителя может быть описана через случайный угол отклонения от перпендикулярного маршрута движения, который, согласно статистическим моделям нарушителя, лежит в пределах 20 градусов от основной оси в обе стороны (фиг.4) [8]. Точность предлагаемого способа уточнения места нарушения может быть оценена как ширина полосы, в пределах которой возможно совпадение отношения временных отрезков. Это совпадение носит случайный характер и зависит от угла, на который произойдет отклонение движения нарушителя при движении от первого до третьего сигнализационных рубежей (фиг.4). Точность уточненного места нарушения ΔН, м, рассчитывается по формуле:

где β - случайный угол максимального отклонения маршрута движения нарушителя от перпендикулярного к рубежу охраны, градус.
С учетом округления в большую сторону значение ΔН лежит в пределах 40-70 метров, что является незначительным в сравнении с протяженностью рубежа. При этом ошибочный маршрут, указываемый аналитической программой, не выходит за пределы сектора возможного отклонения движения нарушителя (фиг.5).
Общая формула уточнения места нарушения вычисления с учетом неточности метода:

Таким образом, на схеме графически визуализируется место нарушения охранного рубежа в виде точек пересечения вектора, указывающего направление движения нарушителя, с линейными частями №1-3 и интервалом, показывающим точность рассчитанного места нарушения (фиг.6). Силы реагирования сразу выдвигаются к указываемому программой уточненному месту нарушения, тем самым исключается необходимость проверки всей линейной части до обнаружения места обрыва.
Способ включает два этапа: подготовительный и основной.
Подготовительный этап:
1. Разбивка трассы прохождения сигнализационного рубежа охраны, рекомендованных геометрических размеров с применением теодолита, артиллерийской буссоли и т.п. [9].
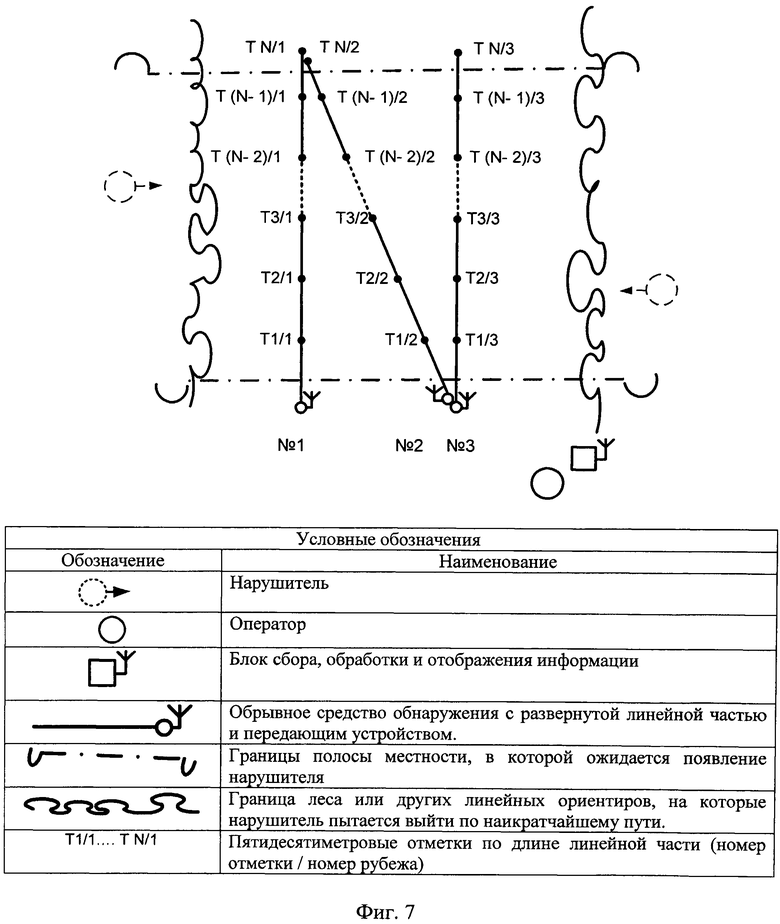
2. Развертывание на местности сигнализационных линейных частей трех обрывных средств обнаружения (фиг.7).
3. Разметка охранного рубежа по длине двух внешних сигнализационных линейных частей через каждые 50 метров (фиг.7).
4. Нанесение сигнализационных линейных частей на схему (карту) местности.
Основной этап начинается при попытке нарушителя преодолеть сигнализационный рубеж охраны и включает (фиг.3):
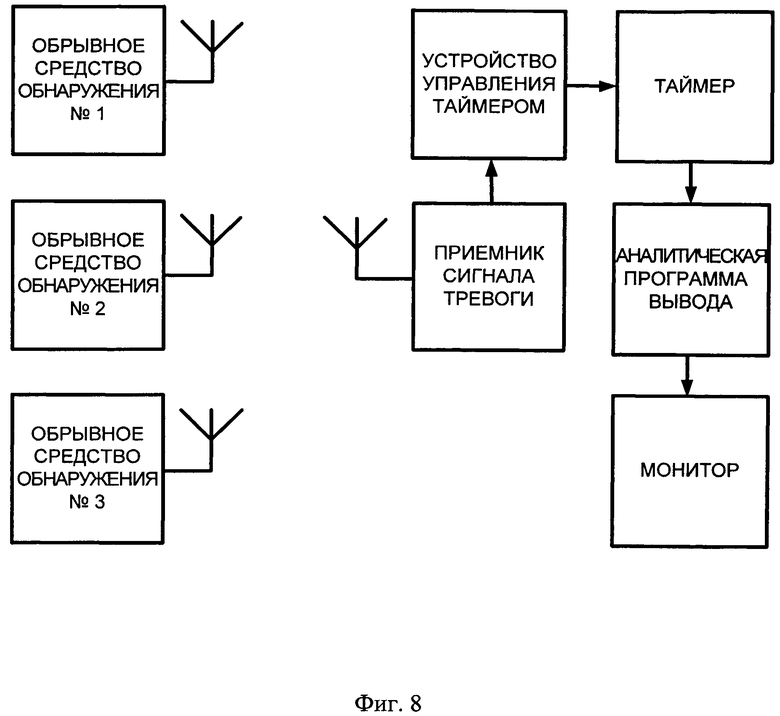
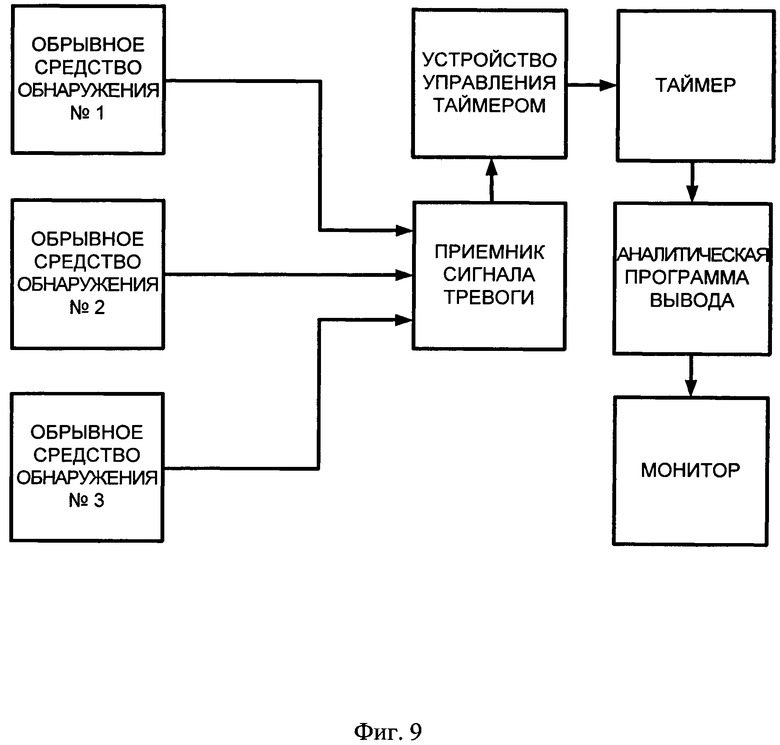
1. Регистрацию сигнала тревоги при преодолении нарушителем линейной части №1 (№3) через радиоканал или проводной канал и начало отсчета интервала времени t1-2 (t3-2) (фиг.8, 9).
2. Регистрацию сигнала тревоги при преодолении нарушителем линейной части №2, окончание отсчета первого интервала времени t1-2 (t3-2), и начало отсчета второго интервала времени t2-3 (t2-1).
3. Регистрацию сигнала тревоги при преодолении нарушителем линейной части №3 (№1), окончание отсчета второго интервала времени t2-3 (t2-1).
4. Подстановка полученных временных интервалов в аналитическую программу по расчету Н и ΔН по формулам (4)-(7).
5. Графическое представление программой уточненного места нарушения на схеме (карте) (фиг.6).
Сущность изобретения поясняется графическими материалами, где на:
- фиг.1 представлена схема действия сил охраны по поиску и задержанию нарушителя в зависимости от способа применения обрывных средств обнаружения;
- фиг.2 - графическое пояснение зависимости отношений пройденных расстояний от конкретного места нарушения;
- фиг.3 - последовательность обработки сигналов, поступающих от обрывных средств обнаружения, алгоритм работы аналитической программы;
- фиг.4 - геометрическое обоснование погрешности измерения, вносимое отклонением от перпендикулярного движения нарушителя;
- фиг.5 - рекомендуемые геометрические размеры охранного рубежа;
- фиг.6 - представление результата уточнения места нарушения на схеме;
- фиг.7 - схема развертывания сигнализационного рубежа охраны;
- фиг.8 - структурная схема сбора, обработки и отображения информации по радиоканалу;
- фиг.9 - структурная схема сбора, обработки и отображения информации по проводному каналу.
Технический результат состоит в:
1. Значительном сокращении времени, затрачиваемом на уточнение места нарушения.
2. Уточнении места нарушения дистанционно и автоматически.
3. Уточнении места нарушения в реальном режиме времени.
Источники информации
1. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: Уч. пособие. - М.: Горячая - Телеком, 2004. - 367 с.
2. Коршняков В.Г. и др. Сигнализационные средства охраны локальных участков. Учебное пособие. - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
3. Прибор сигнализационный обрывного типа «Графит»: Паспорт и инструкция по эксплуатации ЮСДП.425112.001 ПС. - Пенза, 2003. - 19 с.
4. Иванов И.В. Периметр - первый рубеж охраны. - Системы безопасности. - 1996. - №1.
5. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
6. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.
7. Погорелов А.В. Геометрия. Учебник 7-11 классы. - М.: Просвещение, 2010. - 175 с.
8. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. Часть 2 - М.: Просвещение, 1996. - 196 с.
9. Балаян Б.М. Лабораторные работы по курсу «Топография с основами геодезии». - Калининград: ГП «КГТ», 2000. - 224 с.
Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения сигнализационных средств охраны с линейной частью обрывного принципа действия (обрывных средств обнаружения). Технический результат -повышение точности определения места нарушения обрывными средствами обнаружения в реальном режиме времени, дистанционно, автоматически. Способ заключается в аналитическом расчете места нарушения по регистрируемому времени задержки поступления сигналов тревоги от трех обрывных линейных частей, развернутых на местности как единый охранный рубеж с заданными геометрическими размерами. Способ включает подготовительный этап по развертыванию линейных частей обрывных средств обнаружения с ориентированием их на местности и относительно друг друга по установленной схеме и основной этап, который начинается с момента пересечения нарушителем сигнализационного рубежа. В ходе основного этапа регистрируются временные интервалы между сигналами тревог при обрыве линейных частей, затем на основе отношений измеренных временных интервалов и известных геометрических размеров сигнализационного рубежа рассчитывается место нарушения с указанием его на схеме. 9 ил.
Способ указания места нарушения обрывными средствами обнаружения, заключающийся в контроле охранного рубежа на местности одновременно несколькими обрывными средствами обнаружения, отличающийся тем, что при конструктивном выполнении рубежа охраны первая и третья линейные части средств обнаружения развернуты поперек возможного направления движения нарушителя, а вторая - между ними под углом 4-9°, при этом само место нарушения определяется через отрезок, показывающий удаление этого места от вершины угла пересечения первой и второй или второй и третьей линейных частей и рассчитываемого алгоритмом по последовательности поступления сигналов тревоги от трех средств обнаружения, значениям отношений временных интервалов задержки поступления сигналов между собой и постоянного множителя, зависящего только от геометрических размеров рубежа охраны.
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| СИГНАЛЬНОЕ УСТРОЙСТВО | 2008 |
|
RU2375754C1 |
| УСТРОЙСТВО СИГНАЛИЗАЦИИ | 2008 |
|
RU2375753C1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ЧЕЛОВЕКА В ЗОНЕ ОХРАНЫ | 2005 |
|
RU2291493C2 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ СЕМЯН В ШАХМАТНОМ ПОРЯДКЕ | 1993 |
|
RU2074602C1 |
| JP 0003994558 В2, 24.10.2007. | |||

