Изобретение относится к области авиационного приборостроения и может быть использовано в бесплатформенных инерциальных системах, в частности в гировертикалях, курсовертикалях и навигационных системах при измерении углов крена и тангажа подвижного объекта.
Известны бесплатформенные навигационные системы, гировертикали и курсовертикали, с радиальной коррекцией, описанные в патентах RU 2380656 С1 и RU 2382988 С1, в которых для обеспечения вычисления углов тангажа и крена с необходимой точностью во всех режимах движения объекта используется дополнительная информация о параметрах движения объекта от других источников информации - системы воздушных сигналов или спутниковой навигационной системы. Основным недостатком таких систем является их не автономность и большой объем вычислений, требующий вычислителей большой мощности.
Известны бесплатформенные гировертикали с радиальной коррекцией, в которых по показаниям датчиков угловых скоростей с помощью цифровой вычислительной платформы определяется положение летательного объекта в инерциальной системе координат, а восстановление местной вертикали при движении объекта по сфере Земли осуществляется в виде радиальной коррекции - управления положением цифровой платформы по показаниям акселерометров, измеряющих составляющие ускорения силы тяжести при равномерном движении объекта. При этом компенсируется и скорость вращения Земли и дрейф датчиков угловых скоростей [1-3].
Основным недостатком таких гировертикалей является большая погрешность в определении углов крена и тангажа при разгонах и торможениях подвижного объекта, так как в этом случае акселерометры измеряют кажущееся ускорение, включающее в себя как составляющую от ускорения силы тяжести, так и составляющую ускорения от внешних сил (разгонных двигателей, центростремительных сил при координированных разворотах и виражах), воздействующих на подвижный объект.
Прототипом заявленного изобретения является способ управления бесплатформенной гировертикалью, включающий измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат, и устройство для реализации этого способа (RU 2348903 С1, фиг. 1), содержащее трехосный блок датчиков угловых скоростей, трехосный блок датчиков линейных ускорений, блок цифровой платформы, блок вычисления углов крена и тангажа, блок перерасчета линейных ускорений из связанной системы координат в инерциальную систему координат, блок управления цифровой платформой с возможностью отключения управления цифровой платформой при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и включения управления цифровой платформой при уменьшении линейных ускорений в инерциальной системе координат до значений, допустимых для управления цифровой платформой.
При таком способе управления при разгонах и торможениях объекта, координированных разворотах и виражах вследствие отключения обратной связи по управлению происходит нарастание ошибок определения углов крена и тангажа, вызванных движением объекта по сфере Земли, вращением Земли и дрейфом датчиков угловых скоростей. Накопленные угловые погрешности могут достигать такой величины, что после окончания разгона или разворота подвижного объекта и перехода в прямолинейное равномерное движение значения линейных ускорений в инерциальной системе координат будет превышать допустимые для управления, и система управления не восстановится. Произойдет так называемый «завал» цифровой платформы гировертикали.
Задачей, на решение которой направлено заявленное изобретение, является достижение такого технического результата, как обеспечение восстанавливаемости управления цифровой платформой после окончания работы гировертикали в неуправляемом режиме, с достижением такого технического результата, как повышение надежности работы системы управления воздушным судном, путем исключения вероятности отказа гировертикали.
Указанный технический результат достигается способом управления бесплатформенной гировертикалью, включающем измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат, при этом дополнительно введена возможность выполнения вычислений и компенсации ошибок определения углов крена и тангажа при превышении предельно допустимых для управления значений линейных ускорений в инерциальной системе координат.
Кроме того, вычисление и компенсацию ошибок определения углов крена и тангажа при превышении допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат начинают с момента превышения допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат и прекращают в момент уменьшения линейных ускорений в инерциальной системе координат до значений, допустимых для управления цифровой платформой.
Также заявленный технический результат достигается бесплатформенной гировертикалью с радиальной коррекцией, содержащей трехосный блок датчиков угловых скоростей, трехосный блок датчиков линейных ускорений, блок цифровой платформы, блок вычисления углов крена и тангажа, блок перерасчета линейных ускорений из связанной системы координат в инерциальную систему координат, блок управления цифровой платформой с возможностью отключения управления цифровой платформой при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и включения управления цифровой платформы при достижении допустимых для управления значений линейных ускорений в инерциальной системе координат. Дополнительно введены блок приведения цифровой платформы для вычисления и компенсации ошибок положения цифровой платформы при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и блок включения приведения цифровой платформы таким образом, что вход блока включения приведения цифровой платформы соединен с выходом блока датчиков линейных ускорений, а вход блока приведения цифровой платформы соединен с выходом блока включения приведения цифровой платформы и с выходом блока пересчета линейных ускорений из связанной в инерциальную систему координат, при этом выход блока приведения цифровой платформы и выход блока управления цифровой платформой соединены с входом блока цифровой платформы.
Фиг. 1 - график управления цифровой платформой при значениях величин линейных ускорений в инерциальной системе координат, допустимых для управления положением цифровой платформы, с возможностью отключения управления цифровой платформой при превышении допустимых для управления значений линейных ускорений в инерциальной системе координат и включения цифровой платформы при уменьшении линейных ускорений в инерциальной системе координат до допустимых для управления цифровой платформой значений (интервал работы прототипа).
Фиг. 2 - график приведения цифровой платформы из области превышения допустимых для управления значений величин линейных ускорений в инерциальной системе координат в область допустимых для управления значений величин линейных ускорений в инерциальной системе координат (интервал работы заявленного изобретения).
Фиг. 3 - структурно-функциональная блок-схема бесплатформенной гировертикали с радиальной коррекцией.
Способ управления бесплатформенной гировертикалью включает измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат, при этом дополнительно введена возможность выполнения вычисления и компенсации ошибок определения углов крена и тангажа, при превышении допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат, за счет чего обеспечивается восстанавливаемость управления цифровой платформой после работы гировертикали в неуправляемом режиме, а соответственно повышается надежность работы системы управления воздушным судном.
Кроме того, вычисление и компенсацию ошибок определения углов крена и тангажа цифровой платформы при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат начинают с момента превышения допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат и прекращают в момент уменьшения линейных ускорений в инерциальной системе координат до значений, допустимых для управления цифровой платформой, что позволяет повысить надежность работы гировертикали, а следовательно, и безопасность полета.
Для реализации заявленного способа в бесплатформенную гировертикаль с радиальной коррекцией, содержащей трехосный блок датчиков угловых скоростей 2, трехосный блок датчиков линейных ускорений 1, блок цифровой платформы 3, блок вычисления углов крена и тангажа 6, блок перерасчета линейных ускорений из связанной системы координат в инерциальную систему координат 4, блок управления цифровой платформой с возможностью отключения управления цифровой платформой при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и включения управления цифровой платформой при уменьшении линейных ускорений в инерциальной системе координат до значений, допустимых для управления цифровой платформой 5. Дополнительно введены блок приведения цифровой платформы 8 для компенсации ошибок положения цифровой платформы при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и блок включения приведения цифровой платформы 7 таким образом, что вход блока включения приведения цифровой платформы 7 соединен с выходом блока датчиков линейных ускорений 1, а вход блока приведения цифровой платформы 8 соединен с выходом блока включения приведения цифровой платформы 7 и с выходом блока пересчета линейных ускорений 4 из связанной в инерциальную систему координат, при этом выход блока приведения цифровой платформы 8 и выход блока управления цифровой платформой 5 соединены с входом блока цифровой платформы 3.
Заявленные способ и устройство работают следующим образом.
Информация об угловых скоростях в связанной системе координат по трем ортогональным осям летательного объекта передается из трехосного блока микромеханических датчиков угловых скоростей 2 фиг. 3 в блок 3 цифровой платформы, в котором производится преобразование приращения углов в связанной системе координат в инерциальную и расчет углового положение цифровой платформы в виде коэффициентов aN матрицы направляющих косинусов. Коэффициенты матрицы направляющих косинусов передаются в блок 4 пересчета линейных ускорений из связанной системы координат в инерциальную и в блок 6 вычисления углов тангажа и крена.
В блоке 6 вычисления углов тангажа и крена по коэффициентам матрицы направляющих косинусов рассчитываются углы крена (γ) и тангажа (ϑ) летательного объекта в инерциальной системе координат.
Информация о линейных ускорениях в связанной системе координат по трем ортогональным осям летательного объекта передается из трехосного блока микромеханических акселерометров 1 (линейных ускорений) в блок 4 пересчета линейных ускорений из связанной системы координат в инерциальную и блок 7 включения приведения цифровой платформы.
В блоке 4 пересчета линейных ускорений из связанной системы координат в инерциальную по информации об угловом положении цифровой платформы, поступающей из блока 3 цифровой платформы в виде матрицы направляющих косинусов в виде коэффициентов aN матрицы направляющих косинусов, производится пересчет линейных ускорений из связанной системы координат в инерциальную систему координат.
Результаты расчета в виде проекций ускорений на инерциальные оси Аху передаются в блок 5 управления цифровой платформой и блок 8 приведения цифровой платформы.
В блоке 5 управления цифровой платформой реализуется закон управления цифровой платформой (фиг. 1) с расчетом угловой скорости 
где ky - коэффициент усиления сигнала управления.
Если углы крена и тангажа, рассчитанные по показаниям гироскопов, не содержат ошибок, и по связанным осям не действуют линейные ускорения ax1,У1,z1=0, то Ах>у=0, а следовательно, и корректирующий сигнал обратной связи ωx,y=0.
Если же углы крена и тангажа определены с ошибкой, вызванной, например, дрейфом гироскопов или угловой скоростью облета вокруг Земли, то проекции ускорений на инерциальные оси не будут равны нулю Ах,у≠0. В результате, в блоке 5 управления цифровой платформой будет сформирован корректирующий сигнал , с помощью которого в блоке 3 цифровой платформы в виде матрицы направляющих косинусов будет скомпенсирована ошибка углового положения цифровой платформы.
, с помощью которого в блоке 3 цифровой платформы в виде матрицы направляющих косинусов будет скомпенсирована ошибка углового положения цифровой платформы.
Действие линейных ускорений по связанным осям летательного объекта ax1,y1,z1≠0 также будет вызывать появление в блоке 4 пересчета линейных ускорений из связанной системы координат в инерциальную по инерциальным осям Ax,y, а следовательно, и сигналы обратной связи .
.
Однако в этом случае они будут не компенсировать ошибки определения углового положения цифровой платформы, а, наоборот, создавать их.
Величина допустимого значения Ax,y≤Ад определяется заданными ошибками определения углов крена и тангажа.
При больших линейных ускорениях, когда Ax,y становится равной или больше Ад, обратная связь системы управления разрывается -  . В этот момент ошибки определения углов крена и тангажа будут возрастать из-за дрейфа гироскопов и скорости облета Земли.
. В этот момент ошибки определения углов крена и тангажа будут возрастать из-за дрейфа гироскопов и скорости облета Земли.
При исчезновении линейных ускорений, вызванных разгонными двигателями летательного аппарата или виражами и координированными разворотами, величина накопленной ошибки определения углов, определяемая величиной Ax,y, может оказаться больше допустимой (Ax,y>Ад), что не позволит включиться обратной связи в блоке 5 управления цифровой платформой. Произойдет несанкционированный «завал» цифровой платформы гировертикали.
Приведение цифровой платформы в область линейных ускорений по инерциальным осям Ax,y<Ад осуществляется следующим образом.
В блоке 7 включения приведения цифровой платформы по информации, поступающей из трехосного блока акселерометров, анализируется величина, действующих по связанным осям линейных ускорений в виде:
где сумма квадратов текущих значений линейных ускорений, действующих по связанным осям;
сумма квадратов текущих значений линейных ускорений, действующих по связанным осям; - сумма квадратов линейных ускорений, действующих по связанным осям в момент первоначального включения гировертикали при неподвижном объекте.
- сумма квадратов линейных ускорений, действующих по связанным осям в момент первоначального включения гировертикали при неподвижном объекте.
При  в блоке 7 включения приведения цифровой платформы вырабатывается признак С, передаваемый в блок 8 приведения цифровой платформы и разрешающий при С=0 или запрещающий при С=1 включение блока 8 приведения цифровой платформы в область значений Ax,y, допустимых для управления цифровой платформой; δ=(Δα/ΜΑ0)2 - коэффициент, характеризующий допустимую по техническому заданию для работы системы управления гировертикалью величину линейных ускорений Δα, действующих по связанным осям.
в блоке 7 включения приведения цифровой платформы вырабатывается признак С, передаваемый в блок 8 приведения цифровой платформы и разрешающий при С=0 или запрещающий при С=1 включение блока 8 приведения цифровой платформы в область значений Ax,y, допустимых для управления цифровой платформой; δ=(Δα/ΜΑ0)2 - коэффициент, характеризующий допустимую по техническому заданию для работы системы управления гировертикалью величину линейных ускорений Δα, действующих по связанным осям.
По сигналу С=0 и поступающему из блока 4 пересчета линейных ускорений из связанной системы координат в инерциальную значению Ax,y в блоке 8 приведения цифровой платформы вырабатывается угловая скорость приведения цифровой платформы в зону управления:
где kп - коэффициент усиления сигнала приведения.
Выработанный в блоке 8 приведения цифровой платформы сигнал приведения  передается в блок 3 цифровой платформы, где осуществляется компенсация накопленных ошибок определения углов крена и тангажа путем соответствующего поворота цифровой платформы.
передается в блок 3 цифровой платформы, где осуществляется компенсация накопленных ошибок определения углов крена и тангажа путем соответствующего поворота цифровой платформы.
Приведение осуществляется по закону, представленному на фиг. 2. То есть приведение осуществляется при любом значении Ax,y>АД. Но при Ax,y<Ад блок приведения 8 отключается, а включается блок 5 управления цифровой платформой.
Таким образом, использование заявленного изобретения обеспечит восстановление работоспособности гировертикали после отключения системы управления, вызванного действием по связанным осям недопустимых для управления величин линейных ускорений.
В результате использования заявленного изобретения повысится надежность работы гировертикали и, как следствие, безопасность полета.
1. Гироскопические системы, ч.II. Гироскопические приборы и системы. Под ред. Д.С. Пельпора. Учебное пособие для вузов по специальности «Гироскопические приборы и устройства». М., «Высшая школа», 1971, с. 488 (Механические гировертикали с радиальной коррекцией).
2. Браславский Д.А., Логунов С.С., Пельпор Д.С. Авиационные приборы и автоматы Изд. 3-е перераб. и доп. М., машиностроение, 1978, с. 432.
3. Машнин М.Н. Компенсация ускорений, действующих на систему ориентации на борту малоразмерного беспилотного летательного аппарата, Сборник трудов конференции молодых ученых «Навигация и управление движением». 13-16 марта 2012 г. С-Петербург.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЦИФРОВОЙ ПЛАТФОРМОЙ В БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2667320C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ С РАДИАЛЬНОЙ КОРРЕКЦИЕЙ И БЕСПЛАТФОРМЕННАЯ ГИРОВЕРТИКАЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2659970C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК АВТОНОМНОЙ, БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ С ИНТЕГРАЛЬНОЙ КОРРЕКЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2801620C2 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ | 2012 |
|
RU2487318C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
Изобретение относится к области авиационного приборостроения и может быть использовано в бесплатформенных инерциальных системах, в частности в гировертикалях, курсовертикалях и навигационных системах при измерении углов крена и тангажа подвижного объекта. Технический результат - повышение надежности. Для этого осуществляют измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат, при этом обеспечена возможность выполнения вычисления и компенсации ошибок определения углов крена и тангажа при превышении допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат, за счет чего обеспечивается восстанавливаемость управления цифровой платформой после работы гировертикали в неуправляемом режиме, а это повышает надежность работы системы управления воздушным судном. 2 н. и 1 з.п. ф-лы, 3 ил.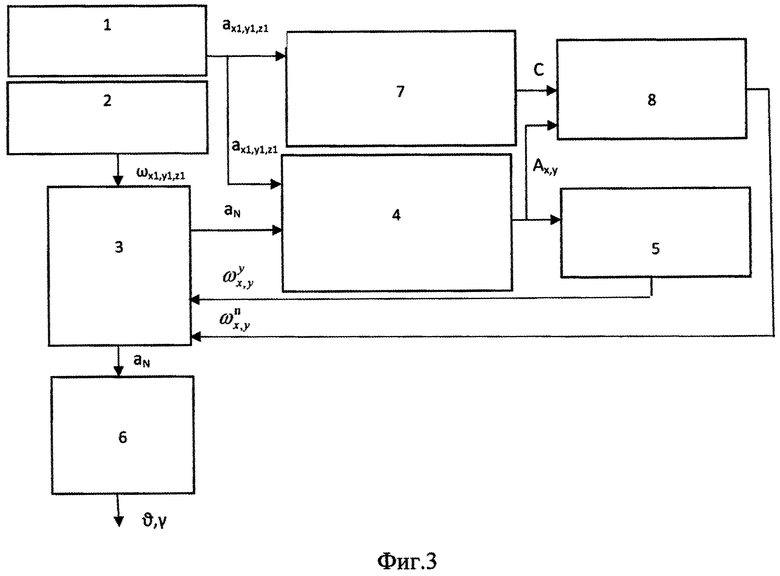
1. Способ управления бесплатформенной гировертикалью, включающий измерение угловых скоростей и линейных ускорений, преобразование приращения углов крена и тангажа из связанной системы координат в инерциальную, вычисление и компенсацию ошибок определения углов крена и тангажа при допустимых для управления цифровой платформой значениях величин линейных ускорений в инерциальной системе координат, отличающийся тем, что дополнительно введена возможность выполнения вычислений и компенсации ошибок определения углов крена и тангажа при превышении допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат.
2. Способ по п. 1, отличающийся тем, что вычисление и компенсацию ошибок определения углов крена и тангажа цифровой платформы при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат начинают с момента превышения допустимых для управления цифровой платформой значений величин линейных ускорений в инерциальной системе координат и прекращают в момент уменьшения линейных ускорений в инерциальной системе координат до значений, допустимых для управления цифровой платформой.
3. Бесплатформенная гировертикаль, содержащая трехосный блок датчиков угловых скоростей, трехосный блок датчиков линейных ускорений, блок цифровой платформы, блок вычисления углов крена и тангажа, блок перерасчета линейных ускорений из связанной системы координат в инерциальную систему координат, блок управления цифровой платформой с возможностью отключения управления цифровой платформой при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и включения управления цифровой платформой при уменьшении линейных ускорений в инерциальной системе координат до значений, допустимых для управления цифровой платформой, отличающаяся тем, что дополнительно введены блок приведения цифровой платформы для компенсации ошибок положения цифровой платформы при превышении допустимых для управления значений величин линейных ускорений в инерциальной системе координат и блок включения приведения цифровой платформы таким образом, что вход блока включения приведения цифровой платформы соединен с выходом блока датчиков линейных ускорений, а вход блока приведения цифровой платформы соединен с выходом блока включения приведения цифровой платформы и с выходом блока пересчета линейных ускорений из связанной в инерциальную систему координат, при этом выход блока приведения цифровой платформы и выход блока управления цифровой платформой соединены с входом блока цифровой платформы.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| RU 2174218 C2, 27.09.2001 | |||
| Гироскопические системы, ч.II | |||
| Гироскопические приборы и системы | |||
| Под ред | |||
| Д.С | |||
| Пельпора | |||
| Учебное пособие для вузов по специальности "Гироскопические приборы и устройства" | |||
| М., "Высшая школа", 1971, с | |||
| Способ и прибор для акустического исследования земных напластований | 1923 |
|
SU488A1 |

