Изобретение относится к области автоматического регулирования, а конкретно к системам управления многостепенными динамическими стендами, содержащими в своем составе несколько следящих систем, каждая из которых управляет одним исполнительным механизмом, например, исполнительными силовыми гидроцилиндрами, управляющими единой нагрузкой шестистепенного динамического стенда - тренажера авиационной техники, работающего в комплексе полунатурного моделирования условий полета при тренировках и обучении экипажей самолетов.
Известны динамические стенды, предназначенные для использования в тренажерах, например динамический стенд КТС ТУ-204 [1], предназначенный для имитации акселерационных эффектов и содержащий платформу с полезной нагрузкой (моделью кабины тренажера), управляемую шестью силовыми гидроцилиндрами. Каждый силовой гидроцилиндр имеет устройство для измерения длины его выдвижения и в комплекте с ним, гидроусилителем и электрической схемой управления образует следящую систему, управляемую внешним задающим сигналом, поступающим из системы управления тренажером и обеспечивающим разложение управляющих сигналов по координатам, соответствующим каждому силовому гидроцилиндру.
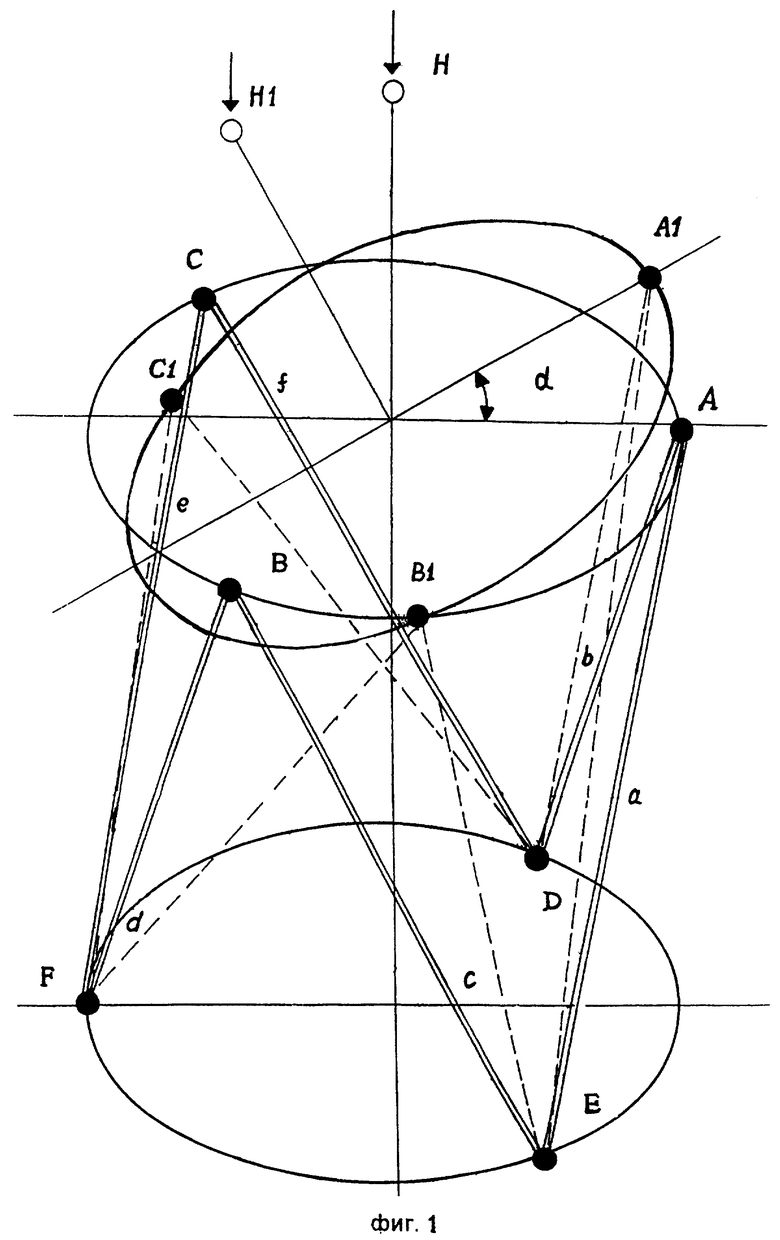
Упрощенная кинематическая схема шестистепенного динамического стенда, представленная на фиг.1, содержит платформу, условно обозначенную буквами А, В, С, на которой располагается полезная нагрузка (кабина тренажера) с центром тяжести в точке Н. Платформа опирается на шесть силовых гидроцилиндров, обозначенных буквами от а до f и закрепленных на основании (на полу) в точках D, Е, F. При соответствующем управлении длиной выдвижения силовых гидроцилиндров возможно задание платформе движения с шестью степенями свободы.
В силу конструктивных особенностей шестистепенных динамических стендов имитация движений реального объекта производится относительно такого, среднего положения платформы в пространстве, при котором шток каждого силового гидроцилиндра выдвинут из своего корпуса на половину своей длины (среднее положение штока гидроцилиндра). При среднем положении платформы перпендикуляр, опущенный из точки Н, характеризующий положение центра тяжести нагрузки, проходит через геометрический центр платформы, вследствие чего нагрузка оказывает одинаковые воздействия на штоки силовых гидроцилиндров.
При имитации акселерационных эффектов приходится искать компромисс между желанием более полно и качественно имитировать акселерационные эффекты реального объекта и жесткими техническими ограничениями на линейные и угловые перемещения кабины тренажера, обусловленные длинами штоков силовых гидроцилиндров динамического стенда. Кроме того, максимальное использование ходов штоков силовых гидроцилиндров, необходимое для более полной имитации акселерационных эффектов, а следовательно качественной тренировки экипажа, осложняется тем, что при отказах электро- и гидропитания на каждый силовой гидроцилиндр динамического стенда может действовать различная неуравновешенность, обусловленная весом платформы с кабиной тренажера и положением платформы в пространстве в момент возникновения аварийной ситуации, которая приводит к появлению опрокидывающего момента. Вследствие этого платформа динамического стенда под действием силы тяжести и опрокидывающего момента может принять такое положение, при котором невозможен безопасный выход тренирующегося экипажа из кабины тренажера.
В динамическом стенде [1] для устранения опрокидывающего платформу момента, обеспечения безопасности тренирующегося экипажа, исключения поломки элементов конструкции стенда и возврата платформы с установленной на ней кабиной тренажера в безопасное нижнее положение при отказах электро- и гидропитания в состав каждого гидропривода введен дополнительный гидроусилитель. Управление всеми дополнительными гидроусилителями осуществляется через нормально замкнутый контакт реле с выхода аккумуляторной цепочки, выполненной на конденсаторах большой емкости. При возникновении аварийной ситуации управляющий сигнал, поступающий с выхода аккумуляторной цепочки, переключает золотники дополнительных гидроусилителей таким образом, что жидкость с пневмогидроаккумуляторов источника гидропитания подается в полость уборки штока силового гидроцилиндра каждого гидропривода, а полость выпуска штока гидроцилиндра каждого гидропривода соединяется с магистралью слива. За счет энергии жидкости, запасенной в пневмогидроаккумуляторах источника гидропитания, подаваемой с одинаковыми расходами в полость уборки штока каждого гидроцилиндра происходит уборка штоков во внутрь своих корпусов и платформа с кабиной тренажера занимает безопасное нижнее положение.
Однако в техническом решении аварийного возврата платформы динамического стенда с полезной нагрузкой не учитываются изменения неуравновешенности нагрузки, действующей на шток каждого гидроцилиндра и обусловленные положением платформы в пространстве при пропадании электро- или гидропитания. Вследствие чего при значительных изменениях неуравновешенности нагрузки, возникающих при больших линейных и угловых перемещениях платформы, не удается обеспечить возврат платформы в безопасное нижнее положение. Поэтому для обеспечения безопасности тренирующегося экипажа и возврата платформы в безопасное нижнее положение приходится ограничивать линейные и угловые перемещения платформы, что значительно снижает полноту и качество имитации движений реального объекта.
Известен динамический стенд, содержащий систему аварийного возврата платформы в безопасное нижнее положение [2], состоящую из блока конденсаторов большой емкости, блока аварийных пневмогидроаккумуляторов и трехпозиционного электрогидравлического крана. При пропадании электро- или гидропитания обмотки управления гидроусилителя каждого гидропривода подключаются к блоку конденсаторов большой емкости и золотники гидроусилителей устанавливаются таким образом, что жидкость из блока аварийных пневмогидроаккумуляторов через трехпозиционный кран с одинаковыми расходами подается в полость уборки штока каждого силового гидроцилиндра, а полость выпуска штока этих гидроцилиндров соединяется с магистралью слива. Однако и это техническое решение аварийного возврата платформы в безопасное нижнее положение не учитывает изменение неуравновешенности нагрузки, действующей на шток каждого силового гидроцилиндра. Поэтому для обеспечения безопасности тренирующегося экипажа и возврата платформы в безопасное нижнее положение, приходится ограничивать перемещения штоков силовых гидроцилиндров, что снижает возможности динамического стенда при имитации движений реального объекта и приводит к снижению качества тренировок экипажа.
В динамическом стенде [3], предназначенном для имитации акселерационных эффектов, для возврата платформы с кабиной тренажера при возникновении аварийной ситуации, в трубопроводах между пневмогидроаккумуляторами источника гидропитания и полостью уборки штока каждого силового гидроцилиндра установлен электроуправляемый золотниковый клапан, а между полостью выпуска штока каждого гидроцилиндра и гидробаком источника гидропитания - второй электроуправляемый золотниковый клапан, причем их управляющие цепи подключены к источнику электропитания через нормально открытый контакт, установленный в линии давления источника гидропитания сигнализатора давления.
В случае пропадания электро- или гидропитания обесточиваются обмотки золотников, их проходные сечения открываются и жидкость от пневмогидроаккумуляторов источника гидропитания подается в полость уборки штока каждого силового гидроцилиндра, а жидкость из полости выпуска штока этих гидроцилиндров поступает по магистрали слива в бак источника гидропитания, при этом давление в полости уборки штока каждого гидроцилиндра становится больше, чем в полости выпуска штока и платформа динамического стенда опускается в безопасное нижнее положение.
Однако такое техническое решение аварийного возврата не учитывает действующую на шток каждого силового гидроцилиндра неуравновешенность, обусловленную весом платформы с кабиной тренажера и положением платформы в пространстве в момент аварии. Платформа под действием силы тяжести и опрокидывающего момента может принять такое положение, при котором невозможен безопасный выход тренирующегося экипажа. Поэтому для возврата платформы динамического стенда в безопасное нижнее положение при пропадании электро- или гидропитания приходится также ограничивать максимальные линейные и угловые перемещения платформы, что не позволяет в полной мере использовать возможности динамического стенда при имитации движений реального объекта.
Проблема учета неуравновешенности нагрузки частично решена в динамическом многостепенном стенде [4], содержащем платформу, несущую полезную нагрузку, например кабину тренажера, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве.
Каждый гидропривод состоит из последовательно соединенных чувствительного элемента, сумматора, усилителя мощности, гидроусилителя и силового гидроцилиндра. Электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания соединен со вторым входом гидроусилителя, а вход чувствительного элемента связан с платформой. Для достижения равенства переходных процессов гидроприводов в структуру каждого гидропривода введено устройство, реализующее компенсацию влияния действующей на силовой гидроцилиндр неуравновешенности, определяемой по совокупности величин перемещений штоков всех гидроцилиндров. Однако это устройство решает только задачи обеспечения равенства переходных процессов и работоспособно только при наличии электро- и гидропитания.
Поэтому аварийный возврат платформы в безопасное нижнее положение, примененный в динамическом стенде [4] не учитывает неуравновешенности нагрузки, действующей на шток каждого силового гидроцилиндра, и при пропадании электро- или гидропитания гидроусилитель каждого гидропривода подключает полость уборки штока силового гидроцилиндра к источнику гидропитания, а полость выпуска штока - с магистралью слива. За счет энергии жидкости, запасенной в пневмогидроаккумуляторах источника гидропитания, подаваемой с одинаковыми расходами в полость уборки штока гидроцилиндра каждого гидропривода происходит уборка штоков гидроцилиндров во внутрь своих корпусов и платформа с полезной нагрузкой занимает безопасное нижнее положение.
Однако такое решение аварийного возврата платформы динамического стенда в безопасное нижнее положение при значительных изменениях неуравновешенности нагрузки, обусловленных большими линейными и угловыми перемещениями платформы, не позволяет удовлетворительно решить задачу обеспечения безопасности тренирующегося экипажа.
Так, например, при наклоне платформы вокруг оси ВС (фиг.1) на такой угол α, при котором перпендикуляр, опущенный из точки Н, характеризующей положение центра тяжести нагрузки при наклоне платформы, пройдет левее линии ВС, неуравновешенность от силы тяжести для гидроцилиндров а и b уменьшится и даже может поменять знак, а для гидроцилиндров d и е - значительно возрастет.
Поэтому при пропадании электро- или гидропитания, на каждый силовой гидроцилиндр, кроме жидкости, поступающей под давлением с пневмогидроаккумуляторов источника гидропитания в полость уборки штока, действует различная неуравновешенность от силы тяжести, что приводит к увеличению скорости уборки штоков гидроцилиндров d и е и уменьшению скорости уборки штоков гидроцилиндров а и b. В результате чего увеличивается угол наклона платформы а и платформа с установленной на ней кабиной тренажера может занять такое положение, при котором невозможен безопасный выход тренирующегося экипажа. Поэтому, для обеспечения возврата платформы с полезной нагрузкой в безопасное нижнее положение в случае возникновения аварийной ситуации, приходится, как и в динамических стендах [1-3], значительно ограничивать максимальные линейные и угловые перемещения платформы, что значительно снижает возможности динамического стенда при имитации движений реального объекта.
Предлагаемое изобретение обеспечивает повышение безопасности тренирующегося экипажа за счет возврата платформы с полезным грузом из любого занимаемого ею положения в пространстве в безопасное нижнее положение при любом изменении неуравновешенности нагрузки, воздействующей на штоки силовых гидроцилиндров при пропадании электро- или гидропитания, а также расширяет возможности динамического стенда путем повышения точности и полноты воспроизведения стендом управляющих воздействий за счет использования при имитации движений реального объекта полного хода штоков силовых гидроцилиндров.
Сущность предлагаемого изобретения заключается в том, что в состав динамического стенда, содержащего платформу, несущую полезную нагрузку, например, кабину тренажера, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных чувствительного элемента, сумматора, усилителя мощности, гидроусилителя и силового гидроцилиндра, причем электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания соединен со вторым входом гидроусилителя, а вход чувствительного элемента связан с платформой, дополнительно введены вычислительное устройство, коммутационное устройство, источник аварийного электропитания и последовательно соединенные устройство контроля положения гидроцилиндров и устройство арретирования платформы. В каждом гидроприводе между сумматором и усилителем мощности установлен управляемый ключ, управляющий вход которого подключен к электрическому входу аварийного управления, а второй вход соединен с соответствующим данному гидроприводу выходом коммутационного устройства. Управляющий вход коммутационного устройства соединен с выходом устройства контроля положения гидроцилиндров, входы, в соответствии с количеством гидроцилиндров - с выходами вычислительного устройства и дополнительно один вход - с выходом устройства арретирования платформы. Управляющий вход устройства арретирования платформы подключен к электрическому входу аварийного управления. Выход чувствительного элемента каждого гидропривода соединен с соответствующими входами устройства контроля положения гидроцилиндров и вычислительного устройства, при этом один дополнительный вход вычислительного устройства соединен с выходом источника аварийного электропитания.
Технических решений, позволяющих при пропадании электро- или гидропитания учитывать изменения неуравновешенности нагрузки, воздействующей на шток каждого силового гидроцилиндра, в соответствии с ними осуществлять дифференцированную подачу жидкости с необходимыми расходами в полости выпуска и уборки штока гидроцилиндров для устранения опрокидывающего момента за счет выравнивания неуравновешенности нагрузки, действующей на шток каждого гидроцилиндра, и последующего плавного возврата (арретирования) платформы динамического стенда с полезной нагрузкой в безопасное нижнее положение из любого первоначально занимаемого положения в пространстве в патентной и научно-технической литературе не обнаружено, что позволяет сделать вывод о соответствии заявляемого изобретения критерию "изобретательский уровень".
На фигуре 1 приведена кинематическая схема шестистепенного динамического стенда;
на фигуре 2 - функциональная схема динамического стенда.
Предлагаемый динамический многостепенный стенд состоит (фиг.2) из платформы 1, источника гидравлического питания 2, нескольких одинаковых следящих гидроприводов 3, 4,...,N по количеству силовых гидроцилиндров, на которые опирается платформа 1. Каждый из следящих гидроприводов 3, 4,...,N состоит из последовательно соединенных чувствительного элемента 5, сумматора 6, усилителя мощности 7, гидроусилителя 8 и силового гидроцилиндра 9, связанного с платформой 1.
В структуру динамического многостепенного стенда введены вычислительное устройство 10, коммутационное устройство 11, источник аварийного электропитания 12 и последовательно соединенные устройство контроля положения гидроцилиндров 13 и устройство арретирования платформы 14. В устройстве контроля положения гидроцилиндров 13 предусмотрены блок выделения наибольшего и наименьшего значения положений штоков гидроцилиндров 15, входы которого по количеству гидроцилиндров 9 соединены с соответствующими выходами чувствительных элементов 5 и блок 16 сравнения. В каждом гидроприводе между сумматором 6 и усилителем мощности 7 последовательно установлен управляемый ключ 17, управляющий вход которого подключен к клемме 18 электрического входа аварийного управления, а второй вход соединен с соответствующим данному гидроприводу выходом коммутационного устройства 11. Управляющий вход коммутационного устройства 11 соединен с выходом устройства контроля положения гидроцилиндров 13, входы, в соответствии с количеством гидроцилиндров - к выходам вычислительного устройства 10 и дополнительно один вход - с выходом устройства арретирования платформы 14. Управляющий вход устройства арретирования платформы 14 подключен к клемме 18 электрического входа аварийного управления. Входы вычислительного устройства 10 соединены, как и входы блока 15, с соответствующими выходами чувствительных элементов 5. Кроме этого, вычислительное устройство 10 имеет дополнительный вход, соединенный с выходом источника аварийного электропитания 12.
Динамический стенд работает следующим образом.
При исправном электро- и гидропитании на управляющем входе устройства арретирования платформы 14 и на управляющем входе управляемого ключа 17 каждого гидропривода 3, 4,...,N присутствует сигнал высокого уровня. При этом в каждом гидроприводе управляемый ключ 17 подключает вход усилителя мощности 7 к выходу сумматора 6 и в соответствии с внешними задающими сигналами, поступающими на второй вход сумматора 6 (Uвх), платформа 1 совершает перемещения, имитируя перемещение реального объекта.
В каждый момент времени с выхода чувствительных элементов 5 каждого гидропривода 3, 4,...,N на входы устройства контроля положения гидроцилиндров 13 и вычислительного устройства 10 поступают сигналы, пропорциональные перемещениям штоков силовых гидроцилиндров 9 этих гидроприводов. Устройство контроля положения гидроцилиндров 13 по совокупности изменения величин перемещений штоков всех гидроцилиндров формирует на своем выходе или сигнал низкого уровня - при наличии разных значений величин перемещений штоков, или сигнал высокого уровня - при наличии одинаковых значений величин перемещений штоков гидроцилиндров, который поступает на вход устройства арретирования платформы 14 и на управляющий вход коммутирующего устройства 11.
Вычислительное устройство 10 в каждый момент времени, в зависимости от значения величины перемещения штока каждого гидроцилиндра 9 относительно его среднего положения, определяет для каждого гидропривода необходимое управляющее воздействие, обеспечивающее компенсацию неуравновешенности нагрузки, действующей на шток каждого гидроцилиндра 9, которые с его выходов поступают на соответствующие входы коммутирующего устройства 11.
При низком уровне сигнала на управляющем входе коммутирующего устройства 11, каждый выход вычислительного устройства оказывается подключенным ко второму входу соответствующего управляемого ключа 17 каждого гидропривода. При высоком уровне сигнала на управляющем входе коммутирующего устройства 11, второй вход управляемого ключа 17 каждого гидропривода подключен к выходу устройства арретирования платформы 14. При отказах электро- или гидропитания на управляющем входе устройства арретирования 14 и управляющем входе управляемого ключа 17 каждого гидропривода 3, 4,...,N с клеммы 18 электрического входа аварийного управления (Uaв) появляется сигнал низкого уровня, при этом в каждом гидроприводе вход усилителя мощности 7 через второй вход управляемого ключа 17 подключается к соответствующему выходу коммутирующего устройства 11. При низком уровне сигнала на управляющем входе коммутирующего устройства 11 управляющие воздействия с выходов вычислительного устройства 10 через коммутирующее устройство 11 и второй вход управляемого ключа 17 каждого гидропривода поступают на вход соответствующих усилителей мощности 7, которые с помощью гидроусилителей 8 осуществляют дифференцированную подачу жидкости, поступающей с пневмогидроаккумуляторов источника гидропитания 2 с необходимыми расходами, в полость уборки или выпуска штока каждого силового гидроцилиндра 9 для выравнивания неуравновешенности нагрузки, действующей на шток каждого гидроцилиндра динамического стенда. В результате платформа 1 с полезной нагрузкой занимает среднее положение, при котором шток каждого силового гидроцилиндра 9 оказывается выдвинут из своего корпуса на половину своей длины, при этом на выходе устройства контроля положения гидроцилиндров 13 появляется сигнал высокого уровня. Коммутирующее устройство 11 подключает выход устройства арретирования платформы 14 ко второму входу управляемого ключа 17 каждого гидропривода. С выхода устройства арретирования платформы 14 на вход усилителя мощности 7 каждого гидропривода 3, 4,...,N поступает плавно нарастающий от нулевого значения до максимального сигнал арретирования платформы динамического стенда, при этом усилители мощности 7 с помощью гидроусилителей 8 подключают полость уборки штока каждого силового гидроцилиндра 9 к пневмогидроаккумуляторам источника гидропитания 2. За счет энергии жидкости, запасенной в пневмогидроаккумуляторах источника гидропитания 2 и подаваемой с одинаковыми расходами в полость уборки штока гидроцилиндра 9 каждого гидропривода 3, 4,...,N, происходит плавная уборка штоков гидроцилиндров во внутрь своих корпусов. При этом платформа 1 с полезной нагрузкой занимает безопасное нижнее положение, обеспечивая экипажу возможность безопасного выхода из кабины тренажера, без ограничения максимальных линейных и угловых перемещений платформы, что, в свою очередь, значительно расширяет возможности динамического стенда при имитации движений реального объекта.
Источники информации
1. Техническое описание динамического стенда КТС ТУ-204, ПКБМ, г. Пенза.
2. А.А. Безбогов, Л.М. Дубовый, П.П. Зобков, Б.В. Клюев. Современные авиационные тренажеры. Часть 3. Моделирование акселерационной обстановки, Рига, РВВАИУ им. Я. Алксниса, 1988 г., стр. 27.
3. Авторское свидетельство № 680483 от 25.10.77 г., ИПК G 09 B 9/08.
4. Патент на изобретение RU № 2129305 от 27.12.1996 г., МПК G 09 B 9/08, опубл. 20.04.1999 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2004 |
|
RU2259597C1 |
| ДИНАМИЧЕСКИЙ СТЕНД АВИАЦИОННОГО ТРЕНАЖЕРА | 2011 |
|
RU2486600C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР | 2009 |
|
RU2398286C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2006 |
|
RU2322618C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА САМОЛЕТА | 2010 |
|
RU2455197C1 |
| СИСТЕМА ПОДВИЖНОСТИ ТРЕНАЖЕРА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
SU1828295A1 |
| УСТРОЙСТВО СИНХРОННОГО ПЕРЕМЕЩЕНИЯ ГИДРОЦИЛИНДРОВ РАБОЧЕГО ОРГАНА | 1997 |
|
RU2119597C1 |
| ФИЗИЧЕСКАЯ МОДЕЛЬ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ И НАВЕДЕНИЯ | 2001 |
|
RU2224295C2 |
Изобретение относится к области автоматического регулирования, а именно к динамическому стенду - тренажеру авиационной техники, работающему в комплексе полунатурного моделирования условий полета при тренировках и обучении экипажей самолетов. Изобретение направлено на повышение безопасности тренирующегося экипажа. Этот результат обеспечивается за счет того, что динамический стенд содержит платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных чувствительного элемента, сумматора, усилителя мощности, гидроусилителя и силового гидроцилиндра. Причем электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания соединен со вторым входом гидроусилителя, а вход чувствительного элемента связан с платформой, дополнительно введены вычислительное устройство, коммутационное устройство, источник аварийного электропитания и последовательно соединенные устройство контроля положения гидроцилиндров и устройство арретирования платформы. В каждом гидроприводе между сумматором и усилителем мощности установлен управляемый ключ, управляющий вход которого подключен к электрическому входу аварийного управления, а второй вход соединен с соответствующим гидроприводу выходом коммутационного устройства. Управляющий вход коммутационного устройства соединен с выходом устройства контроля положения гидроцилиндров, входы, в соответствии с количеством гидроцилиндров - с выходами вычислительного устройства и дополнительно один вход - с выходом устройства арретирования платформы. Управляющий вход устройства арретирования платформы подключен к электрическому входу аварийного управления. Выход чувствительного элемента каждого гидропривода соединен с соответствующими входами устройства контроля положения гидроцилиндров и вычислительного устройства, при этом один дополнительный вход вычислительного устройства соединен с выходом источника аварийного электропитания. 2 ил.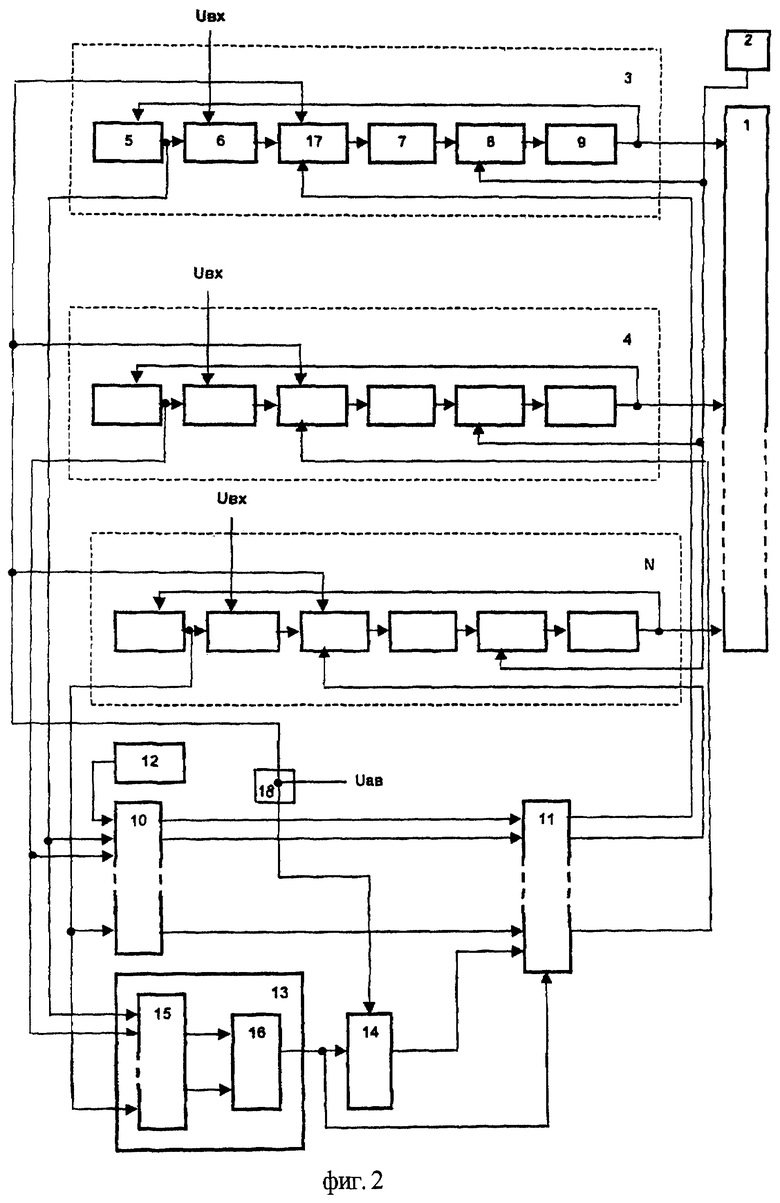
Динамический стенд, содержащий платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных чувствительного элемента, сумматора, усилителя мощности, гидроусилителя и силового гидроцилиндра, причем электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания соединен со вторым входом гидроусилителя, а вход чувствительного элемента связан с платформой, отличающийся тем, что в состав динамического стенда дополнительно введены вычислительное устройство, коммутационное устройство, источник аварийного электропитания и последовательно соединенные устройство контроля положения гидроцилиндров и устройство арретирования платформы, а в каждом гидроприводе между сумматором и усилителем мощности установлен управляемый ключ, управляющий вход которого подключен к электрическому входу аварийного управления, второй вход соединен с соответствующим гидроприводу выходом коммутационного устройства, управляющий вход которого соединен с выходом устройства контроля положения гидроцилиндров, входы в соответствии с количеством гидроцилиндров - с выходами вычислительного устройства и дополнительно один вход - с выходом устройства арретирования платформы, управляющий вход которого подключен к электрическому входу аварийного управления, при этом выход чувствительного элемента каждого гидропривода соединен с соответствующими входами устройства контроля положения гидроцилиндров и вычислительного устройства, один дополнительный вход которого соединен с выходом источника аварийного электропитания.
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| СПОСОБ УПРАВЛЕНИЯ ГИДРОПРИВОДАМИ ПИЛОТАЖНОГО СТЕНДА И УСТРОЙСТВО УПРАВЛЕНИЯ ГИДРОПРИВОДАМИ ПИЛОТАЖНОГО СТЕНДА | 1990 |
|
RU1826790C |
| US 6234799 B1, 22.05.2001 | |||
| 1971 |
|
SU416318A1 | |

