Изобретение относится к области автоматического регулирования, а конкретно к системам управления многостепенными динамическими стендами, содержащими в своем составе несколько следящих систем, каждая из которых управляет одним исполнительным механизмом, например исполнительными силовыми гидроцилиндрами, управляющими единой нагрузкой шестистепенного динамического стенда-тренажера авиационной техники, работающего в комплексе полунатурного моделирования условий полета при тренировках и обучении экипажей самолетов.
Известны динамические стенды, предназначенные для использования в тренажерах, например динамический стенд КТС ТУ-204 [1], предназначенный для имитации акселерационных эффектов и содержащий платформу с полезной нагрузкой, управляющую шестью силовыми гидроцилиндрами. Каждый силовой гидроцилиндр имеет устройство для измерения длины его выдвижения и в комплекте с ним, гидроусилителем и электрической схемой управления образует следящую систему, управляемую внешним задающим сигналом, поступающим из системы управления тренажером и обеспечивающим разложение управляющих сигналов по координатам, соответствующим каждому силовому цилиндру.
Одним из главных условий качественной работы комплекса приводов динамического стенда, обеспечивающих имитацию движения реального объекта, является равенство частотных характеристик приводов и их реакций на управляющие и возмущающие воздействия. Условие обязательного равенства переходных процессов приводов осложняется тем, что на каждый привод динамического стенда при имитации движения реального объекта действуют переменные динамические нагрузки, обусловленные весом платформы с полезной нагрузкой и их линейными и угловыми перемещениями.
Существенное улучшение характеристик приводов и выравнивание параметров переходных процессов при движении штоков силовых цилиндров вверх и вниз можно получить за счет использования в структуре приводов коррекции по сигналу скорости, ускорению или дифференциала ошибки [2]. Чем больше коэффициенты передачи контуров обратных связей по скорости и ускорению, тем меньше разница в переходных процессах. Технические решения, частично обеспечивающие выполнение этих условий, применены в динамическом стенде КТС ТУ-204 [1], однако в связи с имеющимися ограничениями, накладываемыми условиями устойчивости контуров привода, не удалось обеспечить такие коэффициенты передачи контуров следящей системы, которые позволили бы полностью уровнять переходные процессы при движении штоков силовых цилиндров вверх и вниз.
Известен динамический многостепенной стенд [3], содержащий платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве. Каждый гидропривод имеет электрический вход управления и состоит из последовательно соединенных чувствительного элемента, сумматора, усилителя мощности, гидроусилителя и силового гидроцилиндра. Электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания подключен ко второму входу гидроусилителя, а вход чувствительного элемента связан с платформой.
Для достижения равенства переходных процессов при движении штока силового гидроцилиндра каждого гидропривода вверх и вниз в структуру каждого гидропривода включено устройство, выполненное в виде вычислительного устройства и двух параллельно соединенных цепей, состоящих из детектора и управляемого усилителя-ограничителя, включенных между сумматором и усилителем мощности, причем детекторы в параллельных цепях имеют разную полярность, а управляющие входы управляемых усилителей-ограничителей соединены с выходом вычислительного устройства, входы которого соединены с выходами чувствительных элементов всех гидроприводов.
При статических и небольших динамических изменениях моментов неуравновешенности нагрузки введение вышеуказанного устройства в структуру каждого гидропривода обеспечивает компенсацию влияния действующей на шток каждого силового цилиндра неуравновешенности, обусловленной весом платформы и полезной нагрузки, определяемой по совокупности величин перемещений штоков всех силовых цилиндров. Такой характер изменения моментов неуравновешенности нагрузки, действующих на каждый привод динамического стенда, наблюдается в основном при имитации движения маломаневренных реальных объектов, например тяжелых самолетов, предназначенных для перевозки грузов.
Однако при имитации движений маневренных реальных объектов, например летательных аппаратов, выполняющих сложное маневрирование и фигуры высшего пилотажа, возникают значительные динамические изменения моментов неуравновешенности нагрузки, при которых не обеспечивается выравнивание коэффициентов передачи контуров следящих систем, что приводит к снижению точности воспроизведения стендом управляющих воздействий, снижению синхронности работы комплекса приводов стенда и в конечном итоге снижению качества имитации движений реального объекта.
Предлагаемое изобретение направлено на повышение точности воспроизведения стендом управляющих воздействий за счет обеспечения равенства переходных процессов следящих приводов динамического стенда при значительных динамических изменениях действующих нагрузок на каждый из приводов при движении платформы вверх или вниз.
Сущность предлагаемого изобретения заключается в том, что в динамическом многостепенном стенде, содержащем платформу, несущую полезную нагрузку, источник гидропитания и гидроприводы, изменяющие положение платформы в пространстве, каждый из которых имеет электрический вход управления и состоит из последовательно соединенных чувствительного элемента, сумматора, двух параллельно соединенных цепей, состоящих из детектора и управляемого усилителя-ограничителя, причем детекторы в параллельных цепях имеют разную полярность, а также усилителя мощности, гидроусилителя и силового цилиндра, связанного с платформой, причем электрический вход управления подключен ко второму входу сумматора, выход источника гидропитания подключен ко второму входу гидроусилителя, а вход чувствительного элемента связан с платформой, а также вычислительное устройство, входы которого соединены с выходами чувствительных элементов всех гидроприводов динамического стенда, а выход - с управляющими входами управляемых усилителей-ограничителей, в состав каждого гидропривода включены последовательно соединенные дифференциатор и усилитель, выход которого подключен через масштабные делители ко вторым управляющим входам управляемых усилителей-ограничителей, а вход дифференциатора соединен с выходом вычислительного устройства. Дифференциатор и усилитель, введенные в структуру каждого гидропривода и соединенные с возможностью взаимодействия с управляемыми усилителями-ограничителями и вычислительным устройством, обеспечивают компенсацию влияния динамической составляющей, действующей на силовой цилиндр неуравновешенности, определяемой по совокупности изменения величин перемещений штоков всех силовых цилиндров динамического стенда, что в свою очередь, обеспечивает достижение равенства переходных процессов вверх и вниз для каждого привода.
Технических решений, обеспечивающих компенсацию влияния динамической составляющей, действующей на силовой цилиндр неуравновешенности, обусловленной весом платформы с полезной нагрузкой и их линейными и угловыми перемещениями и определяемой по совокупности изменения величин перемещений штоков всех силовых цилиндров динамического стенда, в патентной и научно-технической литературе не обнаружено, что позволяет сделать вывод о соответствии заявляемого изобретения критерию «изобретательский уровень».
На фигуре 1 приведена функциональная схема следящих электрогидроприводов предлагаемого многостепенного динамического стенда;
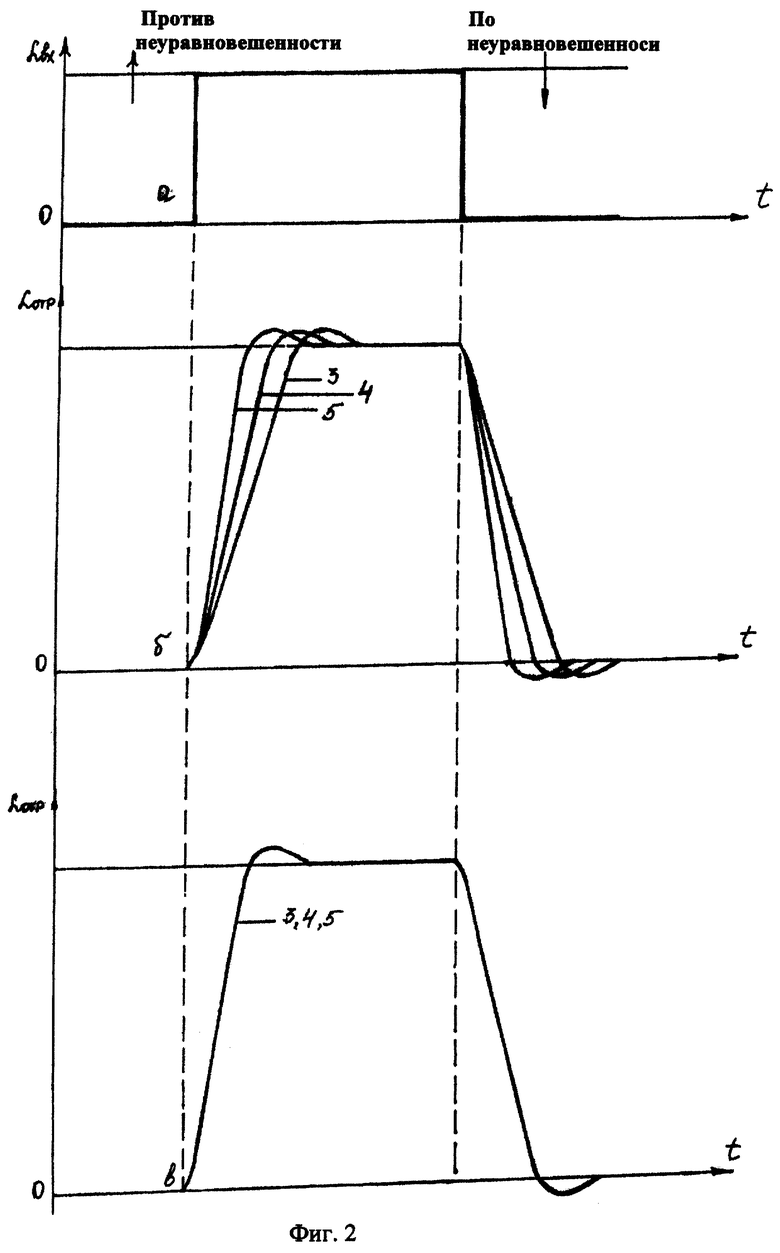
на фигуре 2 - примеры переходных процессов следящих электроприводов динамического стенда при отработке скачков управляющего воздействия до и после использования предлагаемого технического решения.
Предлагаемый многостепенной стенд состоит (фиг.1) из платформы 1, источника гидравлического питания 2 и нескольких одинаковых следящих гидроприводов, по количеству силовых цилиндров, на которые опирается платформа. Для упрощения на фиг.1 изображены три следящих гидропривода, обозначенных позициями 3, 4 и 5. Каждый из следящих гидроприводов состоит из последовательно соединенных чувствительного элемента 6, сумматора 7, двух параллельных цепей, каждая из которых состоит из последовательно соединенных детектора 8, и управляемого усилителя-ограничителя 9 (соответственно для второй цепи - 10 и 11), причем детекторы 8 и 10 имеют разную полярность, а также усилителя мощности 12, гидроусилителя 13 и силового цилиндра 14, связанного с платформой 1. Каждый гидропривод 3, 4, 5 содержит вычислительное устройство 15, входы которого соединены с выходами чувствительных элементов 6 всех гидроприводов, а выход соединен с управляющими входами управляемых усилителей-ограничителей 9 и 11.
В структуру каждого гидропривода 3, 4, 5 введены последовательно соединенные дифференциатор 16 и усилитель 17, выход которого подключен через масштабные делители 18 и 19 ко вторым управляющим входам управляемых усилителей-ограничителей 9 и 11, а вход дифференциатора 16 соединен с выходом вычислительного устройства 15.
Динамический стенд работает следующим образом:
При движении против неуравновешенности коэффициент усиления и уровень ограничения выходного сигнала управляемого усилителя-ограничителя 9 или 11 увеличиваются, а при движении по неуравновешенности коэффициент усиления и уровень ограничения выходного сигнала управляемого усилителя-ограничителя 9 или 11 уменьшаются, вызывая аналогичное изменение действующего момента, развиваемого силовыми цилиндрами 14 гидроприводов 3, 4 или 5, причем это увеличение или уменьшение производится в зависимости от взаимного положения силовых цилиндров 14 всех гидроприводов по сигналу вычислительного устройства каждого гидропривода, учитывающего изменение момента неуравновешенности, действующего на соответствующий силовой цилиндр 14. В дополнение к возможности компенсации влияния статической составляющей момента неуравновешенности нагрузки, действующей на силовой цилиндр 14 при изменении положения платформы 1, дифференциатор 16 вырабатывает сигнал, пропорциональный скорости изменения момента неуравновешенности нагрузки, и через усилитель 17 и масштабные делители 18 и 19 подает его на вторые управляющие входы управляемых усилителей-ограничителей 9 и 11. Усилители-ограничители 9 и 11 изменяют коэффициент усиления и уровень ограничения сигнала на усилителе мощности 12 в зависимости от скорости изменения действующего момента неуравновешенности (в дополнение к учету изменения действующего момента неуравновешенности в статике), что позволяет повысить выравнивание точностных параметров каждого привода при движении по и против неуравновешенности, получая при этом практически одинаковые параметры отработки скачков управляющего воздействия как по, так и против значительно изменяющейся неуравновешенности.
На фиг.2 приведены переходные процессы электроприводов 3, 4, 5 при наличии существенной динамической составляющей неуравновешенности, до и после использования предлагаемого технического решения.
На фиг.2 использованы следующие обозначения:
а - график изменения входного воздействия;
б - график отработки входного воздействия электроприводами 3, 4, 5 до использования предлагаемого технического решения;
в - график отработки входного воздействия электроприводами 3, 4, 5 после использования предлагаемого технического решения.
Как видно из графика «б» при значительной динамической составляющей неуравновешенности кривые переходных процессов электроприводов 3, 4, 5 различны. Причем это различие увеличивается с увеличением динамической составляющей неуравновешенности. Это ограничивает точность воспроизведения стендом управляющих воздействий.
Как видно из графика «б», после использования предлагаемого технического решения при значительной динамической составляющей неуравновешенности кривые переходных процессов электроприводов 3, 4, 5 практически одинаковые, что позволяет существенно повысить точность воспроизведения стендом управляющих воздействий.
Источники информации
1. Техническое описание динамического стенда КТС - ТУ-204, БКПКБМ, г.Пенза.
2. Упраков Ю.И. Гидропривод и средства гидроавтоматики. М.: Машиностроение, 1979 г., с.140.
3. Патент RU 2129305, 20.04.1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| ДИНАМИЧЕСКИЙ СТЕНД | 2005 |
|
RU2285959C2 |
| ДИНАМИЧЕСКИЙ СТЕНД АВИАЦИОННОГО ТРЕНАЖЕРА | 2011 |
|
RU2486600C1 |
| СЛЕДЯЩИЙ ПРИВОД | 2005 |
|
RU2284047C1 |
| СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2145724C1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| УСТРОЙСТВО СИНХРОННОГО ПЕРЕМЕЩЕНИЯ ГИДРОЦИЛИНДРОВ РАБОЧЕГО ОРГАНА | 1997 |
|
RU2119597C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2006 |
|
RU2322618C1 |
| ФИЗИЧЕСКАЯ МОДЕЛЬ ПРОСТРАНСТВЕННОЙ СИСТЕМЫ АКТИВНОЙ ВИБРОИЗОЛЯЦИИ И НАВЕДЕНИЯ | 2001 |
|
RU2224295C2 |
Изобретение относится к испытательной технике, а именно к тренажерным стендам для контроля и управления процессами тренировки и обучения экипажей летательных аппаратов. Технический результат - повышение точности воспроизведения стендом управляющих воздействий. Для достижения данного результата в систему дополнительно введены последовательно соединенные дифференциатор и усилитель. При этом выход усилителя подключен ко вторым управляющим входам управляемых усилителей-ограничителей, а вход дифференциатора соединен с выходом вычислительного устройства. 1 з.п. ф-лы, 2 ил.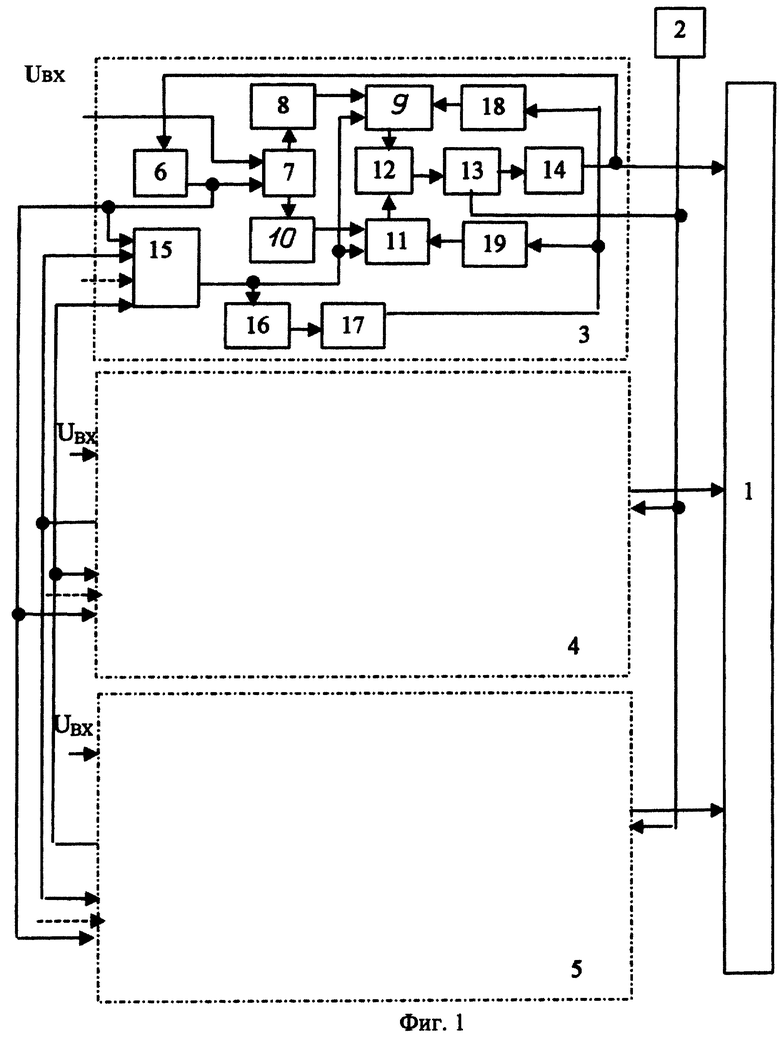
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| Ю.И.Чупраков | |||
| Гидропривод и средства гидроавтоматики | |||
| - М.: Машиностроение, 1979, с.140 | |||
| Прокофьев В.Н | |||
| и др | |||
| Проектирование и расчет автономных приводов | |||
| - М.: Машиностроение, 1978, с.198-204 | |||
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |
| Гидроавтомат управления маркерами | 1978 |
|
SU818516A1 |

