ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к захватному устройству для грузоперемещающих транспортных средств.
В частности, данное изобретение преимущественно применимо для перемещения гидравлических цилиндров землеройных машин.
Более подробно, данное изобретение преимущественно применимо для перемещения гидравлических цилиндров землеройных машин, эксплуатируемых в шахтах и/или открытых карьерах и т.п.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В данной области техники для перемещения огромных количеств земли и/или камней используются землеройные машины значительных размеров.
Эти машины обычно представляют собой гусеничные экскаваторы, содержащие ковш или грейфер, соединенный с остальной частью машины при помощи раздвижной шарнирной стрелы. Указанная стрела выполнена из нескольких частей, которые перемещаются при помощи соответствующих гидравлических приводов.
Приводы имеют значительные габариты и вес, пропорциональные габаритам и весу машин. Например, привод, используемый для перемещения шарнирной стрелы таких землеройных машин, может иметь длину несколько метров и диаметр порядка десятков сантиметров.
Кроме того, приводы могут быть расположены в явно труднодоступных местах и могут быть ориентированы в различных направлениях.
Периодически приводы известных землеройных машин необходимо демонтировать для выполнения операций по их плановой чистке и/или обслуживанию.
Машины работают в очень запыленной окружающей среде, и часто происходит проникновение земли или других загрязнений в приводы, что быстро приводит к сокращению функциональных возможностей.
Операции по демонтажу приводов чрезвычайно сложны и опасны.
Фактически, в первую очередь необходимо поддерживать приводы с обеспечением возможности их удаления из машины полностью безопасным образом. Эту операцию обычно выполняют путем крепления приводов к подъемному механизму при помощи тросов или ремней.
После этого специально обученные рабочие удаляют механические и гидравлические соединения, выполненные между машиной и приводами.
Когда приводы полностью отделены от машины, их отводят от нее при помощи подъемного механизма.
Очевидно, что этот процесс является очень медленным и трудоемким вследствие необходимости прочного закрепления приводов, которые, как указано выше, являются чрезвычайно громоздкими и тяжелыми.
Кроме того, описанные операции по демонтажу приводов представляют довольно значительный риск с точки зрения безопасности рабочих.
В связи с этим техническая задача данного изобретения заключается в создании захватного устройства для грузоперемещающих транспортных средств, которое не имеет вышеописанных недостатков.
В частности, целью данного изобретения является создание захватного устройства для грузоперемещающих транспортных средств, которое обеспечивает возможность быстрого и простого захвата и перемещения грузов.
Еще одной целью является создание захватного устройства для грузоперемещающих транспортных средств, которое обеспечивает возможность безопасного захвата и перемещения грузов.
Более подробно, целью данного изобретения является создание захватного устройства для грузоперемещающих транспортных средств, которое обеспечивает возможность быстрого, простого и безопасного перемещения гидравлических приводов землеройных машин, эксплуатируемых в шахтах и/или открытых карьерах.
В данном изобретении вышеуказанные техническая задача и цели достигаются с помощью захватного устройства для грузоперемещающих транспортных средств, которое имеет технические характеристики, изложенные в одном или более пунктах прилагаемой формулы изобретения.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Дополнительные характеристики и преимущества данного изобретения станут очевидны из последующего неограничивающего описания предпочтительного, но не исключительного варианта выполнения захватного устройства для грузоперемещающих транспортных средств, изображенного на прилагаемых чертежах, на которых:
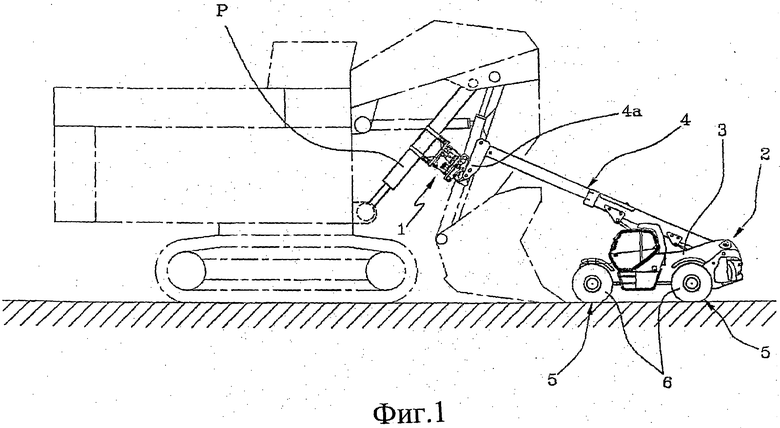
фиг.1 изображает вид сбоку грузоперемещающего транспортного средства, содержащего захватное устройство, показанное на фиг.2,
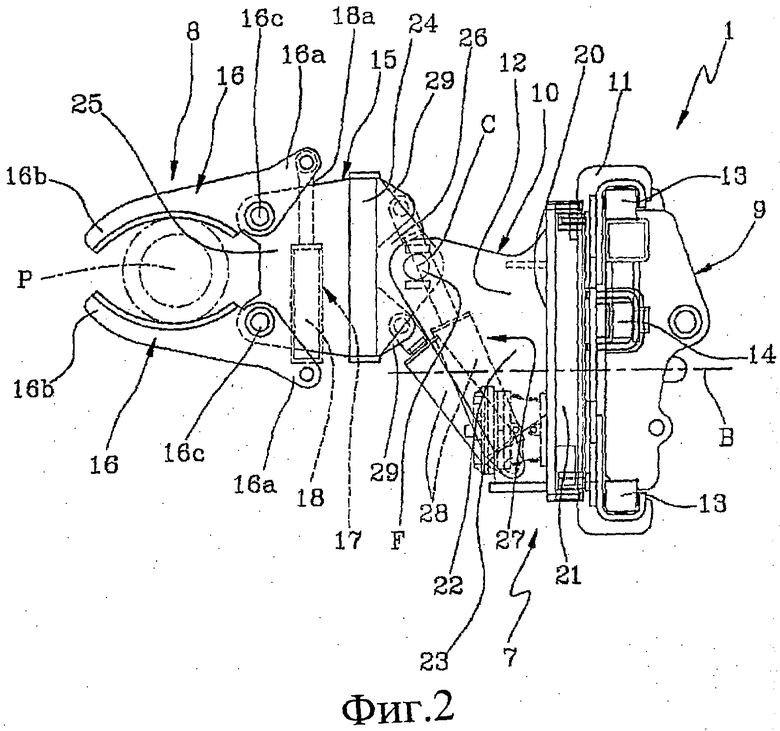
фиг.2 изображает вид сбоку предложенного захватного устройства для грузоперемещающих транспортных средств,
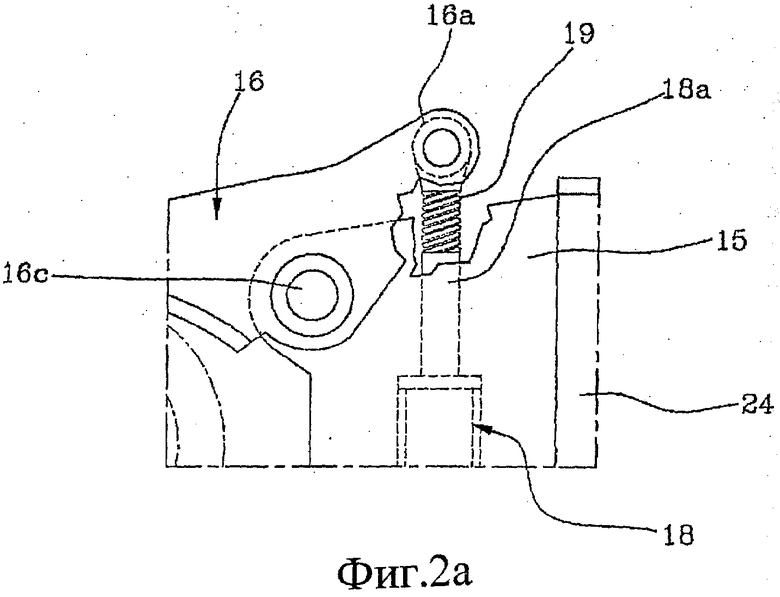
фиг.2а изображает увеличенный фрагмент фиг.2, и
фиг.3 изображает вид сверху захватного устройства для грузоперемещающего транспортного средства, показанного на фиг. 1.
В соответствии с чертежами номером 1 позиции обозначено в целом захватное устройство для грузоперемещающих транспортных средств.
На фиг.1 захватное устройство 1 функционально соединено с грузоперемещающим транспортным средством 2.
Более подробно, транспортное средство 2 содержит раму 3 и подвижную телескопическую стрелу 4, прикрепленную к раме 3 указанного средства 2 и предназначенную для поддержания груза заданного веса.
К раме присоединены специальные движущие средства 5, обеспечивающие возможность перемещения транспортного средства 2 по рабочей площадке.
В изображенном варианте выполнения движущие средства 5 содержат двигатель (не показан) и колеса 6. Как вариант, средства 5 содержат гусеничные цепи для более легкого перемещения машины.
В частности, устройство 1 соединено со стрелой 4 транспортного средства 2.
Захватное устройство 1 содержит несущую конструкцию 7, выполненную с возможностью разъемного соединения с опорной стрелой 4 транспортного средства 2, и зажим 8, соединенный с указанной конструкцией 7 и предназначенный для взаимодействия, по меньшей мере, с поддерживаемым и/или перемещаемым объектом Р.
В описанном варианте выполнения поддерживаемый и/или перемещаемый объект Р представляет собой, например, гидравлический цилиндр землеройной машины, эксплуатируемой в шахтах и/или открытых карьерах и т.п.
Более подробно, конструкция 7 содержит соединительный узел 9, который жестко прикреплен к свободному концу 4а стрелы 4.
Несущая конструкция 7 содержит каретку 10, соединенную с узлом 9 с возможностью скольжения и выполненную с возможностью поступательного перемещения относительно него вдоль направления А перемещения. Зажим 8 поддерживается на каретке с возможностью перемещения вдоль указанного направления А.
Каретка 10 содержит салазки 11, соединенные с узлом 9 с возможностью скольжения, и несущий корпус 12, соединенный с указанными салазками с возможностью поворота вокруг оси В поворота. Более подробно, зажим 8 поддерживается корпусом 12 каретки 10. Таким образом, зажим 8 может поворачиваться относительно салазок 11 вокруг оси В.
Соединительный узел 9 содержит две прямые параллельные направляющие 13, по которым скользят салазки 11 каретки 10. Направляющие 13 расположены параллельно направлению А перемещения.
Кроме того, между кареткой 10 и узлом 9 несущей конструкции 7 расположены специальные средства 14 для перемещения. В частности, указанные средства 14 расположены между узлом 9 и салазками 11 и воздействуют на них с обеспечением перемещения каретки 10 и, следовательно, корпуса 12 и зажима 8.
Несущий корпус 12 каретки 10 содержит основную пластину 20, расположенную перпендикулярно оси В поворота и соединенную с опорным сцепным колесом 21, размещенным на узле 9. От пластины 20 отходит пара пластин 22, расположенных перпендикулярно пластине 20 и параллельно друг другу. Как станет более понятно из дальнейшего описания, зажим 8 соединен с корпусом 12 при помощи пластин 22 для обеспечения возможности поворота несущего корпуса 12, к каретке 10 присоединен специальный двигатель 23. Указанный двигатель 23, жестко прикрепленный к корпусу 12, расположен между пластинами 22 корпуса 12. Двигатель 23 может быть электрическим или гидравлическим.
Более подробно, зажим 8 присоединен к несущему корпусу 12 с возможностью поворота, так что он может совершать колебания по отношению корпуса 12 относительно оси С колебаний, проходящей перпендикулярно оси В поворота.
Зажим 8 содержит основной корпус 15, прикрепленный к несущему корпусу 12 каретки 10 с возможностью совершения колебаний, и пару захватных элементов 16, присоединенную к основному корпусу 15 с возможностью поворота. В частности, корпус 15 соединен с пластинами 22 несущего корпуса 12 каретки 10.
В соответствии с предпочтительным вариантом выполнения зажим 8 содержит две пары захватных элементов 16, соединенных попарно и выполненных с возможностью перемещения с взаимным сближением и/или удалением между рабочим положением, в котором элементы 16 находятся в контакте с объектом Р и взаимодействуют с ним с обеспечением его поддерживания и/или перемещения, и нерабочим положением, в котором они не взаимодействуют с объектом Р.
Пары захватных элементов 16 расположены в параллельных плоскостях с заданным разнесением. Таким образом, зажим 8 может захватывать объект Р в по меньшей мере двух отдельных и разнесенных точках с обеспечением захватывания объекта Р и маневрирования им устойчивым и надежным образом.
Элементы 16 имеют вытянутую и изогнутую форму и имеют соответствующие концы 16а, расположенные проксимально к основному корпусу 15, и концы 16b, отстоящие от корпуса 15.
Элементы 16 шарнирно прикреплены к корпусу 15 в соответствующих точках 16с поворота, расположенных между проксимальными концами 16а и дистальными концами 16b элементов 16.
Зажим 8 дополнительно содержит активирующие средства 17, действующее на захватные элементы 16 с обеспечением их перемещения между рабочим и нерабочим положениями.
В предпочтительном варианте выполнения средства 17 содержат соответствующий гидравлический привод 18, присоединенный между концами 16а каждой пары захватных элементов 16 зажима 8.
Зажим 8 дополнительно содержит, по меньшей мере, упругий элемент 19, расположенный между каждым приводом 18, и по меньшей мере одним из захватных элементов 16 каждой пары. В частности, упругий элемент 19 расположен между концом 18а каждого привода 18 и проксимальным концом 16а одного из элементов 16 каждой пары. Например, упругий элемент 19 представляет собой пружину.
Элемент 19 преимущественно обеспечивает возможность ограничения передачи нежелательных воздействий от захватных элементов 16 к остальной части зажима 8.
Основной корпус 15 зажима 8 содержит плоскую пластину 24, от которой отходит пара пластин 25, проходящих перпендикулярно указанной пластине 24 и параллельно друг другу. Эти пластины 25 корпуса 15 зажима 8 шарнирно прикреплены к пластинам 22 несущего корпуса 12 каретки 10. Таким образом, корпус 15 зажима 8 может совершать колебания относительно оси С колебаний.
Основной корпус 15 зажима 8 дополнительно содержит две пары кронштейнов 26, которые проходят от плоской пластины 24 корпуса 15 перпендикулярно ей на стороне, противоположной пластинам 25.
Каждая пара захватных элементов 16 шарнирно прикреплена к соответствующей паре кронштейнов 26 в соответствующих точках 16с поворота.
Захватное устройство 1 дополнительно содержит двигательные средства 27, действующие на зажим 8 с обеспечением совершения им колебаний и приведения его в заданное положение относительно оси С.
В частности, средства 27 содержат, по меньшей мере, привод 28, расположенный между несущим корпусом 12 каретки 10 и основным корпусом 15 зажима 8.
Более подробно, средства 27 содержат два привода 28, действующих на корпус 15 зажима 8 в разных точках и в противоположных направлениях относительно точки Р поворота между основным корпусом 15 и несущим корпусом 12.
Более подробно, основной корпус 15 зажима 8 содержит две кулисы 29, которые проходят перпендикулярно плоской пластине 24 корпуса 15 и расположены с противоположной стороны от точки Р поворота.
Каждый привод 28, таким образом, соединен с соответствующей кулисой 29. В данной конфигурации при необходимости наклона зажима 8 на заданный угол оба привода 28 действуют на основной корпус 15 зажима 8, облегчая выполнение указанной операции.
Оба привода 28 размещены между пластинами 22 несущего корпуса 12.
Изобретение обеспечивает достижение поставленных целей и дает важные преимущества.
Предложенное захватное устройство обеспечивает возможность перемещения объектов чрезвычайно простым и безопасным способом.
Поскольку зажим может совершать как поступательное, так и поворотное перемещение, имеется возможность перемещения объектов в нескольких направлениях.
Что касается, в частности, землеройных машин, эксплуатируемых в шахтах и/или открытых карьерах, предложенное захватное устройство обеспечивает возможность надежного и безопасного перемещения гидравлических приводов данных машин.
Таким образом, операции, необходимые для демонтажа приводов для выполнения операций по их чистке и/или обслуживанию, существенно упрощаются и ускоряются.
Предложенное захватное устройство также обеспечивает возможность проведения указанных операций с высокой степенью безопасности для выполняющих их рабочих.
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для транспортирования и вертикальной саморазгрузки и самопогрузки емкости | 2022 |
|
RU2789920C1 |
| Трубомонтажная машина для сооружения линии нефтепродуктопроводов | 2022 |
|
RU2791635C1 |
| ГУСЕНИЧНАЯ ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2025560C1 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| Транспортное средство для погрузки и перевозки древесины | 1990 |
|
SU1772014A1 |
| Валочно-пакетирующая машина | 1975 |
|
SU657725A3 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ТОПЛИВНЫХ ЭЛЕМЕНТОВ, СООТВЕТСТВУЮЩИЕ ЗАЖИМ И ПОГРУЗОЧНО-РАЗГРУЗОЧНАЯ СИСТЕМА | 2009 |
|
RU2488902C2 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| РАБОЧЕЕ ОРУДИЕ | 1991 |
|
RU2046885C1 |
| Захватное устройство для пакетов плит | 1986 |
|
SU1463688A1 |
Изобретение относится к захватному устройству грузоперемещающих транспортных средств. Техническим результатом является обеспечение быстрого, простого и безопасного перемещения гидравлических приводов землеройных машин, эксплуатируемых в шахтах и карьерах. Предложено захватное устройство для грузоперемещающих транспортных средств, содержащее несущую конструкцию (7), выполненную с возможностью разъемного соединения с опорной стрелой грузоперемещающего транспортного средства, по меньшей мере один зажим (8), функционально соединенный с несущей конструкцией (7) и предназначенный для взаимодействия, по меньшей мере, с перемещаемым объектом (Р). Причем зажим (8) выполнен с возможностью поступательного перемещения вдоль направления (А) перемещения и с возможностью поворота вокруг оси (В), проходящей перпендикулярно указанному направлению (А). При этом несущая конструкция (7) содержит соединительный узел (9), выполненный с возможностью жесткого крепления к стреле, и каретку (10), соединенную с указанным узлом (9) с возможностью скольжения, поддерживающую зажим (8) с обеспечением его перемещения вдоль направления (А) перемещения и содержащую несущий корпус (12). Кроме того, соединительный узел (9) содержит две прямые и параллельные направляющие (13), по которым перемещается каретка (10) и которые расположены параллельно направлению (А) перемещения. Зажим (8) также содержит основной корпус (15), прикрепленный к несущему корпусу (12) с возможностью совершения колебаний, и активирующие средства, действующие между захватными элементами (16) с обеспечением их перемещения между рабочим и нерабочим положениями. Причем захватные элементы (16) прикреплены к основному корпусу (15) с возможностью поворота, имеют вытянутую форму и имеют соответствующие концы, расположенные проксимально к основному корпусу (15). А активирующие средства содержат гидравлический привод, действующий между указанными проксимальными концами. 2 н. и 6 з.п. ф-лы, 4 ил.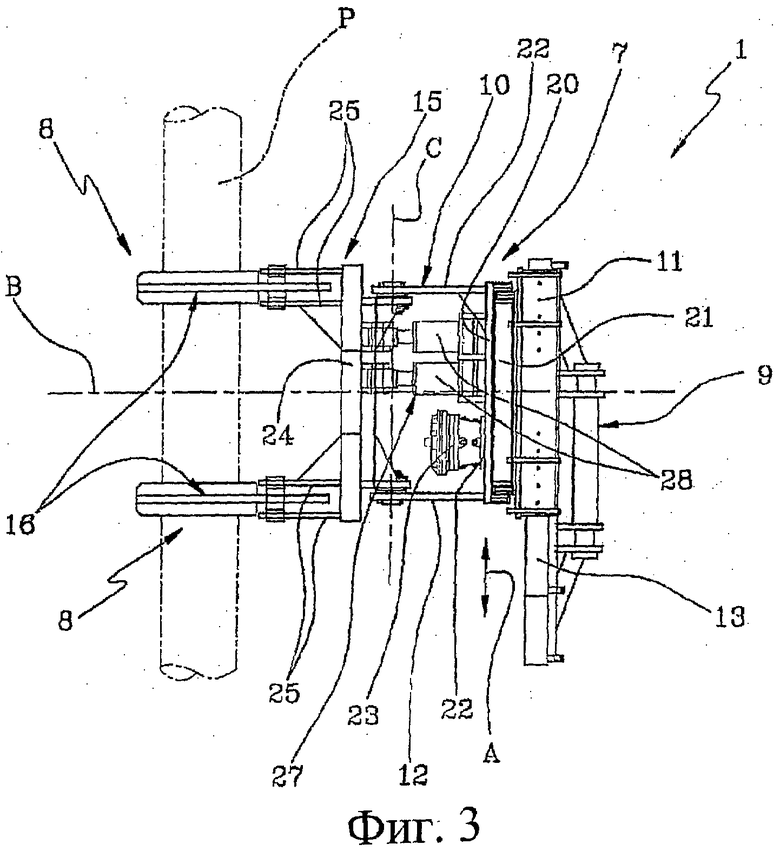
1. Захватное устройство для грузоперемещающих транспортных средств, содержащее
несущую конструкцию (7), выполненную с возможностью разъемного соединения с опорной стрелой (4) грузоперемещающего транспортного средства (2),
по меньшей мере один зажим (8), функционально соединенный с несущей конструкцией (7), предназначенный для взаимодействия, по меньшей мере, с перемещаемым объектом (Р) и содержащий по меньшей мере пару захватных элементов (16), выполненных с возможностью перемещения между рабочим положением, в котором указанные элементы (16) взаимодействуют с объектом (Р), и нерабочим положением, в котором элементы (16) не взаимодействуют с объектом (Р), причем зажим (8) выполнен с возможностью поступательного перемещения вдоль направления (А) перемещения и с возможностью поворота вокруг оси (В) поворота, проходящей перпендикулярно указанному направлению (А), а несущая конструкция (7) содержит соединительный узел (9), выполненный с возможностью жесткого прикрепления к стреле (4), и каретку (10), соединенную с указанным узлом (9) с возможностью скольжения, поддерживающую зажим (8) с обеспечением его перемещения вдоль направления (А) перемещения и содержащую несущий корпус (12), при этом соединительный узел (9) содержит две прямые и параллельные направляющие (13), по которым перемещается каретка (10) и которые расположены параллельно направлению (А) перемещения, отличающееся тем, что зажим (8) содержит основной корпус (15), прикрепленный к несущему корпусу (12) с возможностью совершения колебаний, и активирующие средства (17), действующие между захватными элементами (16) с обеспечением их перемещения между рабочим и нерабочим положениями, причем захватные элементы (16) прикреплены к основному корпусу (15) с возможностью поворота, имеют вытянутую форму и имеют соответствующие концы (16а), расположенные проксимально к основному корпусу (15), а активирующие средства (17) содержат гидравлический привод (18), действующий между указанными проксимальными концами (16а).
2. Захватное устройство по п.1, отличающееся тем, что к несущему корпусу (12) присоединены салазки (11), соединенные с несущим корпусом (12) с возможностью поворота и соединенные с соединительным узлом (9) с возможностью скольжения, при этом несущий корпус (12) выполнен с возможностью поворота вокруг оси (В) поворота относительно салазок (11) с обеспечением поворота зажима (8).
3. Захватное устройство по п.1, отличающееся тем, что оно содержит средства (14) для перемещения каретки (10), которые расположены между соединительным узлом (9) и несущим корпусом (12).
4. Захватное устройство по п.1, отличающееся тем, что зажим (8) содержит по меньшей мере один упругий элемент (19), расположенный между приводом (18) и захватным элементом (16).
5. Захватное устройство по любому из предыдущих пунктов, отличающееся тем, что оно содержит две пары захватных элементов (16), расположенных попарно в параллельных и разнесенных плоскостях.
6. Захватное устройство по п.1, отличающееся тем, что оно содержит двигательные средства (27), соединенные с несущим корпусом (12) и действующие на основной корпус (15) зажима (8) с обеспечением приведения зажима (8) в заданное положение относительно оси (С) колебаний.
7. Захватное устройство по п.2, отличающееся тем, что несущий корпус (12) содержит пластину (20), которая соединена с опорным сцепным колесом (21) салазок (11) с возможностью поворота, и две пластины (22), которые параллельны друг другу и соединены с пластиной (20).
8. Грузоперемещающее транспортное средство, содержащее
раму (3),
движущие средства (5), функционально присоединенные к раме (3) для обеспечения возможности ее перемещения,
по меньшей мере одну опорную стрелу (4), функционально присоединенную к раме (3) и предназначенную для поддержания заданной нагрузки,
по меньшей мере одно захватное устройство (1), соединенное со стрелой (4) и предназначенное для взаимодействия, по меньшей мере, с перемещаемым объектом (Р),
отличающееся тем, что захватное устройство (1) выполнено по любому из пп.1-7.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| RU 2002054 C1, 30.10.1993 | |||
| Устройство для погрузки и разгрузки груза | 1983 |
|
SU1253950A2 |
| ВАЛОМНО-ПОГРУЗОЧНАЯ СТРЕЛА | 0 |
|
SU170239A1 |
| 1971 |
|
SU409684A1 | |
| Рабочее оборудование экскаватора | 1985 |
|
SU1293282A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДБИВКИ ТРУБОПРОВОДА ГРУНТОМ ИЗ ОТВАЛА, ОБОРУДОВАНИЕ ДЛЯ УПЛОТНЕНИЯ ГРУНТА ПОД ТРУБОПРОВОДОМ И ГРУНТОУПЛОТНЯЮЩИЙ МЕХАНИЗМ | 1998 |
|
RU2135699C1 |
| FR 2848200 A1, 11.06.2004 | |||
| WO 2005123564 A1, 29.12.2005 | |||

