Изобретение относится к области вооружения, а именно к ракетной технике, в частности к ракетам, регулярно вращающимся по углу крена, например со стартом из ствольной установки.
Известен способ измерения угла крена ракеты, регулярно вращающейся по углу крена, и датчик угла крена ракеты, его реализующий, приведенные в системе наведения управляемого снаряда [описание патента России №2217692 от 08.10.01 г., МКИ7 F42B 15/01], выбранные в качестве прототипа. Способ измерения угла крена ракеты, регулярно вращающейся по углу крена, при котором на частоте вращения ракеты периодически закрывают и открывают световой поток между светодиодом и фотодиодом, в которой формируют по углу крена импульсы с периодом повторения, соответствующим величине угла 360°, и скважностью, близкой к меандру, при этом измеряют время с момента разарретирования гироскопа и длительности предыдущих импульсов с логическим единичным уровнем (ti), в соответствии с которыми регулируют длительности последующих импульсов с логическим единичным уровнем (ti+1), где i=1, 2, 3 и т.д.
Известный датчик угла крена, который реализует этот способ, содержит последовательно соединенные гироскоп инерциальный с оптронным датчиком, компаратор и устройство сдвига фазы, при этом вход гироскопа инерциального с оптронным датчиком и второй вход устройства сдвига фазы подключены к часовому механизму (таймеру).
Далее (по тексту) гироскоп инерциальный с оптронным датчиком угла крена в соответствии с выполняемой функцией назван гироскопическим датчиком угла крена.
Известное техническое решение компенсирует фазовый уход оси гироскопа на всем промежутке полета ракеты. Однако время функционирования гироскопического датчика угла крена ограничено, что соответственно ограничивает дальность полета ракеты.
Следовательно, недостатком известного технического решения является то, что оно обладает ограниченным временем функционирования, уменьшающим дальность управляемого полета ракеты.
Задачей предлагаемой группы изобретений является исключение ограничения времени его функционирования, что не ограничивает величину дальности управляемого полета ракеты.
Поставленная задача решается за счет того, что в способе измерения угла крена ракеты, регулярно вращающейся по углу крена, включающем измерение угла крена гироскопическим датчиком угла крена и преобразование его в сигнал, близкий к меандру, с периодом повторения, соответствующим 360°, который формируют на выходе устройства измерения угла крена ракеты, новым является то, что дополнительно используют на ракете датчик магнитного поля Земли, сигнал которого с периодом повторения, соответствующим 360°, в соответствии с его полярностью преобразуют в прямоугольные колебания, в первоначальный заданный момент времени t1 исключают первый импульс прямоугольных колебаний и, начиная с выбранных фронтов нарастания или спада второго, измеряют длительности временных интервалов между ними, запоминают каждую измеренную величину предыдущего временного интервала Ti до времени окончания счета последующего Ti+1, где i=2, 3, 4 и т.д., измеряют длительность временного интервала Δt между выбранным фронтом второго импульса прямоугольных колебаний и ближайшего отстающего от него аналогичного фронта сигнала, близкого к меандру, вычисляют коэффициент N=Δt/T2 и запоминают его до конца полета ракеты, формируют импульсы длительностями τi+1=N·Ti, отсчитываемыми от выбранных фронтов импульсов прямоугольных колебаний, начиная с третьего, измеряют временные интервалы 

Датчик угла крена ракеты, реализующий способ измерения угла крена ракеты, регулярно вращающейся по углу крена, содержит таймер и последовательно соединенные гироскопический датчик угла крена и первый компаратор, новым является то, что он снабжен электронным переключателем, измерителем временных интервалов, последовательно соединенными датчиком магнитного поля Земли и вторым компаратором, а также последовательно соединенными устройством установки, измерителем временной задержки и формирователем корректированного сигнала, при этом выход устройства установки соединен с первым входом измерителя временных интервалов, второй и третий входы которого соединены с выходами соответственно второго компаратора и таймера, второй вход измерителя временной задержки соединен с первым выходом измерителя временных интервалов, второй, третий, четвертый и пятый выходы которого соединены соответственно со вторым, третьим, четвертым и пятым входами формирователя корректированного сигнала, выход первого компаратора соединен с третьим входом измерителя временной задержки и первым коммутируемым входом электронного переключателя, второй коммутируемый вход которого соединен с выходом формирователя корректированного сигнала, управляющий вход электронного переключателя соединен с выходом задатчика времени переключения.
При этом измеритель временных интервалов содержит последовательно соединенные первую, вторую и третью задержки, выход которой соединен с S входом первого RS триггера, а также трехвходовую логическую схему И, выход которой соединен с С входом первого счетчика импульсов, инвертированный выход которого соединен с первым входом трехвходовой логической схемы И, а также первый и второй регистры, первую, вторую и третью логические схемы И, второй и третий счетчики импульсов, при этом выход первой логической схемы И соединен с С входом первого D триггера, инвертированный выход которого соединен с его D входом, а неинвертированный выход соединен через четвертую задержку с первым входом первой логической схемы исключающее ИЛИ, второй вход которой соединен с выходом первого D триггера, выход первой задержки соединен с входом С второго регистра и первым входом второй логической схемы И, выход второй задержки соединен с R входом второго счетчика импульсов, выход первого RS триггера соединен с первым входом третьей логической схемы И, выход которой соединен с С входом второго счетчика импульсов, вход С первого регистра соединен с неинвертированным выходом третьего счетчика импульсов, инвертированный выход которого соединен со вторым входом второй логической схемы И, выход которой соединен с С входом третьего счетчика импульсов, второй вход третьей логической схемы И соединен с выходом синхронизатора, при этом объединенные вместе R входы первого и третьего счетчиков импульсов являются первым входом измерителя временных интервалов, вторым входом которого являются второй вход трехвходовой логической схемы И и второй вход первой логической схемы И, третий вход трехвходовой логической схемы И являются третьим входом измерителя временных интервалов, первым выходом которого является неинвертированный выход первого счетчика импульсов, соединенный с первым входом первой логической схемы И, выходы первого и второго регистров являются соответственно вторым и третьим выходами измерителя временных интервалов, четвертым выходом которого является выход второго счетчика импульсов, соединенный с D входами первого и второго регистров, а выход первой логической схемы исключающее ИЛИ, соединенный с R входом первого RS триггера и входом первой задержки, является пятым выходом измерителя временных интервалов.
Измеритель временной задержки содержит последовательно соединенные пятую задержку, вторую логическую схему исключающее ИЛИ и четвертую логическую схему И, а также второй D триггер, инвертированный выход которого соединен с его D входом, а неинвертированный - со вторым входом второй логической схемы исключающее ИЛИ и входом пятой задержки, выход четвертой логической схемы И соединен со вторым входом первой логической схемы ИЛИ, выход которой соединен с R входом третьего D триггера, соединенного D входом с источником логической единицы, выход третьего D триггера соединен с первым входом пятой логической схемы И, второй вход которой соединен с выходом синхронизатора, а выход - с С входом четвертого счетчика импульсов, при этом первый вход первой логической семы ИЛИ, соединенный с R входом четвертого счетчика импульсов, является первым входом измерителя временной задержки, вторым входом которого является С вход третьего D триггера, соединенный со вторым входом четвертой логической схемы И, вход С второго D триггера является третьим входом измерителя временной задержки, выходом которого является выход четвертого счетчика импульсов.
Формирователь корректированного сигнала содержит последовательно соединенные делитель чисел, умножитель и первый цифровой компаратор, а также последовательно соединенные вторую логическую схему ИЛИ, шестую, седьмую и восьмую задержки, выход восьмой задержки соединен с S входом второго RS триггера, а выход седьмой задержки соединен с R входом пятого счетчика импульсов, выход шестой задержки соединен с С входом третьего регистра, выход второй логической схемы ИЛИ соединен с R входом второго RS триггера, выход которого соединен с первым входом шестой логической схемы И, второй вход которой соединен с выходом синхронизатора, а ее выход подключен к входу С пятого счетчика импульсов, выход третьего регистра соединен с первым входом второго цифрового компаратора, выход пятого счетчика импульсов соединен со вторым входом первого цифрового компаратора и подключен за исключением младшего разряда к D входу третьего регистра, выход QA=В первого цифрового компаратора соединен с первым входом второй логической схемы ИЛИ, второй вход которой соединен с выходом седьмой логической схемы И, выход QA>В первого цифрового компаратора соединен со вторым входом седьмой логической схемы И, при этом первый и второй входы делителя чисел являются соответственно первым и вторым входами формирователя корректированного сигнала, третьим и четвертым входами которого являются вторые входы соответственно умножителя чисел и первого цифрового компаратора, первый вход седьмой логической схемы И является пятым входом формирователя корректированного сигнала, выходом которого является выход второго цифрового компаратора.
Заявленный способ измерения угла крена на ракете, регулярно вращающейся по углу крена, реализуется следующим образом. После старта, например, на траектории полета ракеты (управляемого снаряда) измеряют ее угол крена гироскопическим датчиком угла крена, который преобразуют в сигнал, близкий к меандру, с периодом повторения, соответствующим углу крена ракеты 360°, формируемым на выходе устройства измерения угла крена ракеты.
Датчик магнитного поля Земли на ракете выдает электрический сигнал с периодом повторения, соответствующим 360°, амплитуда которого зависит от чувствительности конкретного датчика магнитного поля Земли, от расположения продольной оси ракеты относительно магнитного поля Земли и может быть смещена относительно нуля.
Таким образом, электрический сигнал вращения ракеты вокруг своей продольной оси, привязанный к магнитному полю Земли, имеет период повторения угла крена ракеты 360° и неизвестный начальный угол крена ракеты, который известен в сигнале, близком к меандру, с периодом повторения, соответствующим углу крена ракеты 360°.
В соответствии с полярностью электрического сигнала с датчика магнитного поля Земли его преобразуют в прямоугольные колебания. В первоначальный заданный момент времени t1 исключают первый импульс прямоугольных колебаний, например, с единичным логическим уровнем, что позволяет исключить первый неправильный (укороченный) импульс.
Начиная с выбранных фронтов нарастания или спада второго импульса прямоугольных колебаний измеряют длительности временных интервалов между ними, которые соответствуют угловым интервалам крена ракеты, равным 360°.
Запоминают каждую измеренную величину предыдущего временного интервала Ti до времени окончания счета последующей Ti+1, где i=2, 3, 4 и т.д.
Измеряют также величину длительности временного интервала Δt между выбранным фронтом второго импульса прямоугольных колебаний, т.е. нарастания либо спада и следующим за ним фронтом сигнала, близкого к меандру. При этом фронт сигнала (нарастание или спад), близкого к меандру, должен соответствовать выбранному фронту второго импульса прямоугольных колебаний. Величину Δt можно представить, например, в виде разового импульса длительностью Δt.
Вычисляют и запоминают до конца полета ракеты величину коэффициента N, равную

Таким образом, величина Δt равна величине опережения сигнала датчика магнитного поля Земли относительно отстающего сигнала гироскопического датчика угла крена ракеты на интервале T2, что соответствует величине разности фаз Δφ этих двух сигналов. Следовательно, сигнал с выхода датчика магнитного поля Земли требуется скорректировать, т.е. задержать его на время, соответствующее Δφ.
Поскольку длительность временных интервалов Ti+1 (в том числе и Т2) соответствует длительности углового интервала, равного 360°, то

при этом величина N согласно выражению 2 может иметь изменяться от 0 до 1.
Как следует из изложенного выше, при изменении угловой скорости вращения ракеты по углу крена (общий случай) Δφ=const, a Δt=var, т.к. каждому периоду вращения ракеты по углу крена Ti+1 соответствует своя (прямо пропорциональная этой величине) пересчитанная величина задержки Δt.
Таким образом, величина требуемой пересчитанной задержки (в цифре) для каждой Ti равна длительности соответствующего импульса τi+1 (моменту формирования его заднего фронта), отсчитываемого от выбранных фронтов импульсов прямоугольных колебаний:

Следовательно, длительности импульсов τi+1 (определяемые соответствующими задними фронтами) учитывают изменение величин длительностей интервалов T3, T4, T5, T6 и т.д. по предыдущим значениям. При этом само формирование импульсов длительностями τi+1 осуществляют, например, с помощью цифрового компаратора, при котором сравнивают предыдущую запомненную величину N·Ti с текущей (последующей линейно изменяемой с нулевого значения) величиной Ti+1 с выхода счетчика импульсов.
Измеряют временные интервалы

В заданный момент времени t2, формируют сигнал переключения, которым отключают сигнал угла крена ракеты, близкий к меандру, и подключают вместо него сигнал с длительностью импульсов 
Заданный момент времени t2 определяют исходя из продолжительности работы гироскопического датчика угла крена до момента времени, при котором он начинает вносить фазовую ошибку. Данную конкретную величину момента времени t2 выбирают после обработки статистических данных величин фазовых ошибок.
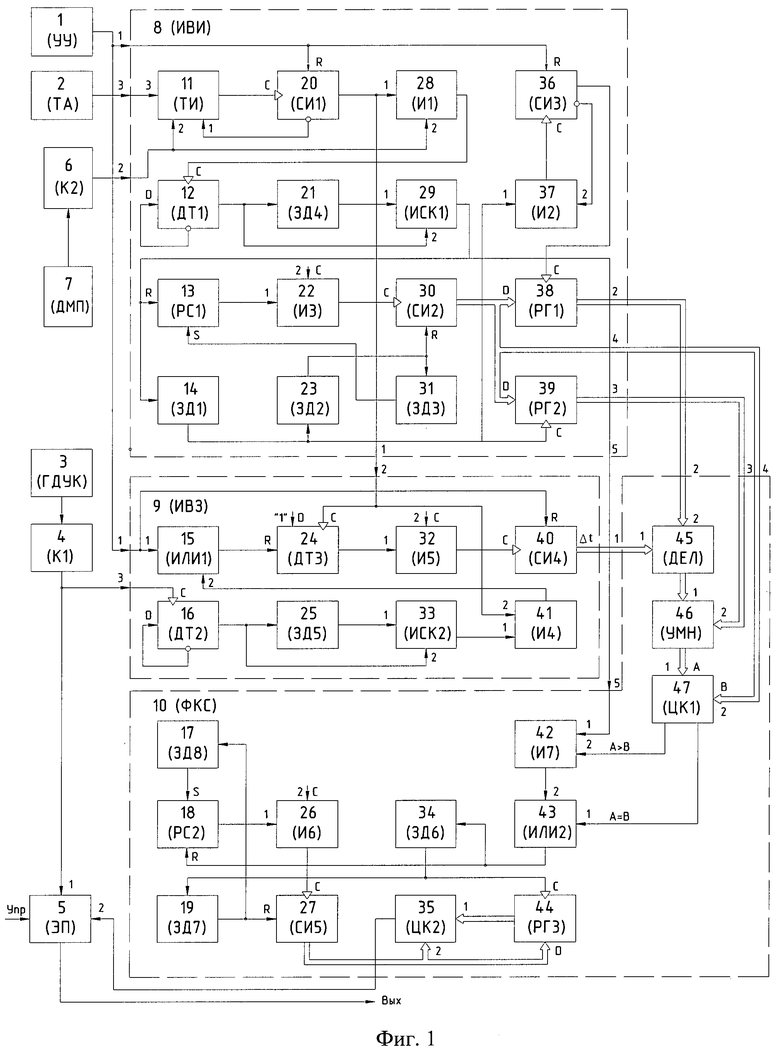
Предлагаемое изобретение поясняется чертежами, приведенными на фиг.1, 2 и 3. На фиг.1 представлена структурная электрическая схема датчика угла крена ракеты, регулярно вращающейся по углу крена, где 1 - устройство установки (УУ); 2 - таймер (ТА); 3 - гироскопический датчик угла крена (ГДУК); 4 и 6 - первый и второй компараторы соответственно (К1 и К2); 5 - электронный переключатель (ЭП); 7 - датчик магнитного поля Земли (ДМП); 8 - измеритель временных интервалов (ИВИ); 9 - измеритель величины задержки (ИВЗ); 10 - формирователь корректированного сигнала (ФКС); 11 - трехвходовая логическая схема И (ТИ); 12, 16 и 24 - первый, второй и третий D триггеры соответственно (ДТ1, ДТ2 и ДТ3); 13 и 18 - первый и второй RS триггеры соответственно (РС1 и РС2); 14, 23, 31, 21, 25, 34, 19 и 17 - первая, вторая, третья, четвертая, пятая, шестая, седьмая и восьмая задержки соответственно (ЗД1, ЗД2, ЗД3, ЗД4, ЗД5, ЗД6, ЗД7 и ЗД8); 15 и 43 - первая и вторая логические схемы ИЛИ (ИЛИ); 20, 30, 36, 40 и 27 - первый, второй, третий, четвертый и пятый счетчики импульсов соответственно (СИ1, СИ2, СИ3, СИ4 и СИ5); 28, 37, 22, 41, 32, 26 и 42 - первая, вторая, третья, четвертая, пятая, шестая и седьмая логические схемы И соответственно (И1, И2, И3, И4, И5, И6 и И7); 29, 33 - первая и вторая логические схемы исключающее ИЛИ (ИСК); 47 и 35 - первый и второй цифровые компараторы соответственно (ЦК1 и ЦК2); 38, 39 и 44 - первый, второй и третий регистры соответственно (РГ1, РГ2 и РГ3); 45 - делитель чисел (ДЕЛ); 46 - умножитель чисел (УМН).
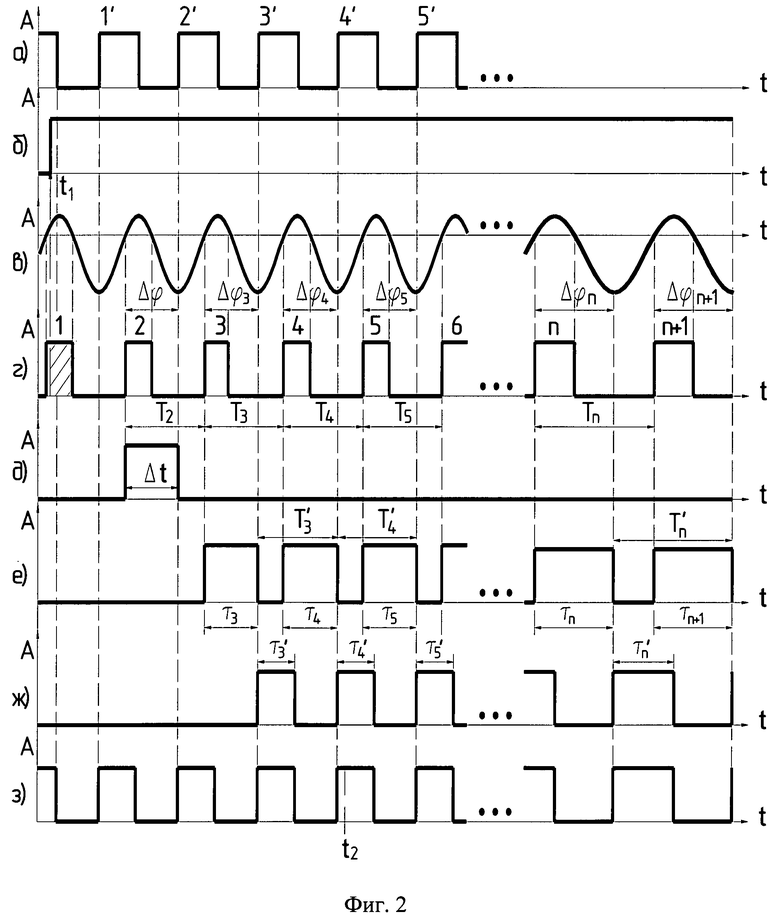
На фиг.2 приведены эпюры сигналов, где представлены: "а" - сигнал на выходе первого компаратора 4; "б" - сигнал на выходе таймера 2; "в" - сигнал на выходе датчика магнитного поля Земли 7; "г" - сигнал на выходе второго компаратора 6; "д" - сигнал на выходе третьего D триггера 24; "е" - сигнал на выходе QA>В первого цифрового компаратора 47; "ж" - сигнал на выходе второго цифрового компаратора 35; "з" - сигнал на выходе электронного ключа 5.
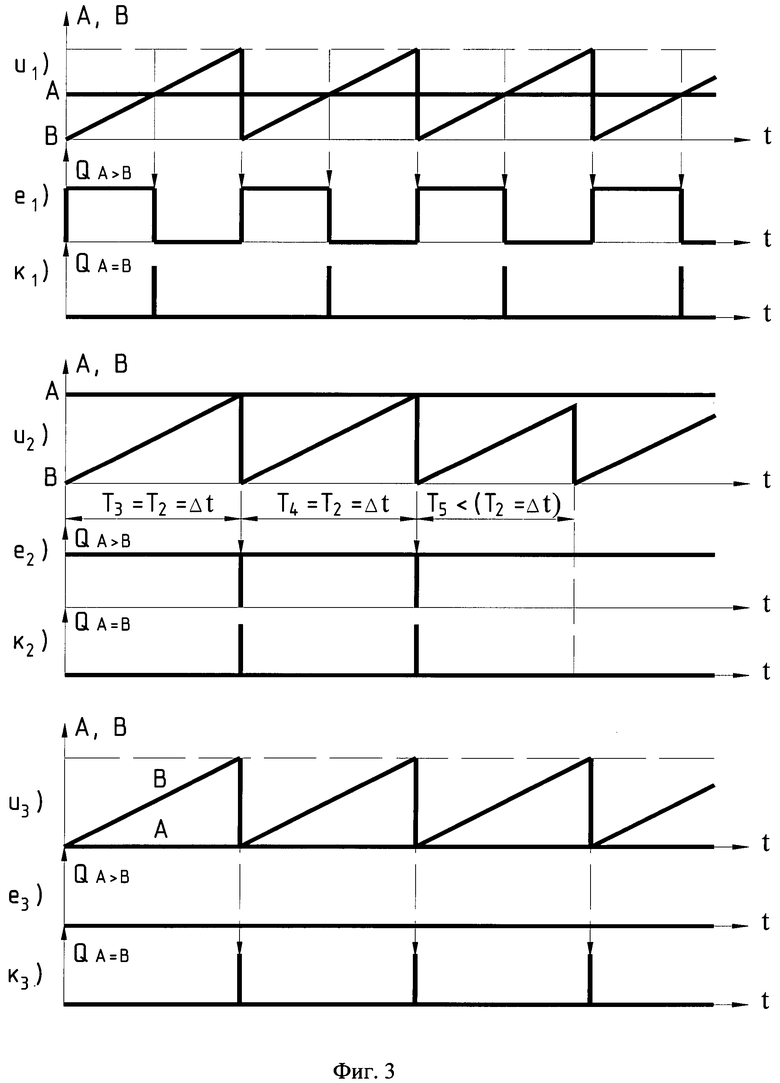
На фиг.3 приведены эпюры сигналов соответственно для трех возможных вариантах, где представлены: "и1", "и2" и "и3" - сигналы на входах А (первом) и В (втором) первого цифрового компаратора 47; "e1", "е2" и "е3" - сигналы на выходе QA>В первого цифрового компаратора 47; "к1", "к2" и "к3" - сигналы на выходе QA=В первого цифрового компаратора 47.
В датчике угла крена ракеты последовательно соединены гироскопический датчик угла крена 3 и первый компаратор 4. Последовательно соединены датчик магнитного поля Земли 7 и второй компаратор 6, а также последовательно соединены устройство установки 1, измеритель временной задержки 9 и формирователь корректирующего сигнала 10. Выход устройства установки 1 соединен с первым входом измерителя временных интервалов 8. Второй и третий входы измерителя временных интервалов 8 соединены с выходами соответственно второго компаратора 6 и таймера 2. Второй вход измерителя временной задержки 9 соединен с первым выходом измерителя временных интервалов 8, второй, третий, четвертый и пятый выходы которого соединены с входами соответственно второго, третьего, четвертого и пятого формирователя корректированного сигнала 10. Выход первого компаратора 4 соединен с третьим входом измерителя временной задержки 9 и первым коммутируемым входом электронного переключателя 5, второй коммутируемый вход которого соединен с выходом формирователя корректированного сигнала 10. Управляющий вход электронного переключателя 5 соединен с выходом задатчика времени переключения.
Таймер 2, выполняющий функцию часового механизма [Патент России №2217692], может быть выполнен, например, как последовательно соединенные RC интегрирующая цепочка и компаратор, второй вход которого соединен с выходом делителя напряжения, выполненного на двух резисторах. На входы делителя напряжения и интегрирующей цепочки подается напряжение с момента старта ракеты. Датчик магнитного поля Земли 6, например магниточувствительный датчик KMZ 51 фирмы "Philips".
Гироскопический датчик угла крена 3 и первый компаратор 4 могут быть выполнены, как в прототипе [Патент России №2217692 от 08.10.01 г., МКИ7 F42B 15/01]. Второй компаратор 6 может быть выполнен так же, как и первый, с той лишь разницей, что порог срабатывания его равен нулю или с гистерезисом около нуля. Электронный переключатель 5, например мультиплексор на микросхеме 564 КП1. Устройство установки 1 может быть выполнено, как известное устройство [Патент России №2220401 от 17.04.02 г., МКИ7 F42B 15/01].
Трехвходовая логическая схемы И 11 соответственно трехвходовая логическая схема И на микросхеме, например, 564 серии. Первый 13 и второй 18 RS триггеры, например микросхемы 564 ТМ2. Первая 14, вторая 23, третья 31, четвертая 21, пятая 25, шестая 34, седьмая 19 и восьмая 17 задержки могут быть выполнены, например, как два последовательно соединенных ждущих мультивибратора, второй из которых срабатывает по заднему фронту импульса с выхода первого. Первая 15 и вторая 43 логические схемы ИЛИ двухвходовые, например, на микросхемах серии 564.
Первый 20 и третий 36 счетчики импульсов, например, выполнены на микросхеме 564 ИЕ10, при этом каждый из них выполнен как два последовательно включенных одноразрядных счетчика импульсов, первый из которых срабатывает по фронту нарастания, а второй по фронту спада, причем для получения инвертированного сигнала к выходу второго одноразрядного счетчика подключают инвертирующую логическую схему. Второй 30, четвертый 40 и пятый 27 счетчики импульсов срабатывают по фронту нарастания и выполнены, например, на микросхеме 564 ИЕ10.
Первая 28, вторая 37, третья 22, четвертая 41, пятая 32, шестая 26 и седьмая 42 логические схемы И - это двухвходовые логические схемы И, например, микросхемы 564 серии. Логические схемы исключающее ИЛИ 29 и 33, например, соответствующие микросхемы 564 серии.
Первый 47 и второй 35 цифровые компараторы выполнены, например, на микросхеме К561ИП2 [В.Л.Шило. "Популярные цифровые микросхемы", Москва, Радио и связь, 1987 г., стр.270-273, рис.2.67], которые имеют три фиксированных состояния: QA>В, QA<В и QA=В, каждому из которых соответствует единичный логический уровень на одном из трех его выходах, при этом соответственно А и В цифровые сигналы на первом и втором его входах.
Регистры первый 38, второй 39 и третий 44, например микросхемы 564ИР9. Делитель чисел 45 и умножитель чисел 46 выполнены, например, как программно запоминающие устройства на микросхемах 556РТ7, адреса строк и столбцов которых являются соответственно первым и вторым цифровыми входами для двоичных чисел.
Сигналы С, подаваемые на соответствующие входы логических схем, поступают с автогенератора стабильной частоты (синхронизатора), который не приведен на фиг.1 для ее упрощения. Сигнал на управляющий вход электронного ключа 5 подается с задатчика времени переключения, выполненного, например, как таймер 2, который также не приведен на фиг.1.
Заявленное устройство, приведенное на фиг.1, работает следующим образом. После выхода бортового источника питания на рабочий режим устройство установки 1 формирует разовый импульс, который поступает на первый вход измерителя временных интервалов 8, а именно на R входы первого 20 и третьего 36 счетчиков импульсов и устанавливает на их выходах нулевые логические уровни.
Гироскопический датчик угла крена 3 формирует сигнал, который поступает на вход первого компаратора 4, на выходе которого формируется сигнал, близкий к меандру (эпюра "а" на фиг.2). Этот сигнал поступает на первый коммутируемый вход электронного переключателя 5, на вход управления которого поступает в исходном состоянии с задатчика времени переключения (на фиг.1 не приведен), например, нулевой логический уровень, его пропускающий.
Таким образом, на выходе датчика угла крена ракеты, регулярно вращающейся по углу крена, существует сигнал, близкий к меандру, фронты нарастания и спада которого соответствуют 0° и 180° (эпюра "а" на фиг.2).
При вращении ракеты по углу крена датчик магнитного поля Земли 7 измеряет величину магнитного поля, и на его выходе формируется электрический сигнал (эпюра "в" на фиг.2). Амплитуда этого сигнала зависит от чувствительности конкретного датчика магнитного поля Земли, от расположения продольной оси ракеты относительно магнитного поля Земли и может быть смещена относительно нуля. Сигнал с выхода датчика магнитного поля Земли 7 поступает на вход второго компаратора 6. На его выходе формируется логический сигнал, уровни которого соответствуют положительному и отрицательному значениям сигнала с выхода датчика магнитного поля Земли 7. Сигнал с выхода второго компаратора 6 поступает на второй вход измерителя временных интервалов 8, входом которого является второй вход трехвходовой логической схемы И 11.
Сигнал с выхода таймера 2 поступает на третий вход измерителя временных интервалов 8, а именно на третий вход трехвходовой логической схемы И 11. В исходном состоянии сигнал с выхода таймера 2 имеет нулевой логический уровень (эпюра "б" на фиг.2), который запрещает прохождения сигналов на выход трехвходовой логической схемы И 11. В первоначальный момент времени t1 на выходе таймера 2 формируется единичный логический уровень, который разрешат прохождение импульсов со второго входа трехвходовой логической схемы И 11 (эпюра "г" на фиг.2) на ее выход, т.к. на ее первом входе присутствует логическая единица. Причем первый импульс прямоугольных колебаний пройдет (в данном случае) не весь, а только его заштрихованная часть, начинающаяся с фронта нарастания в момент времени t1.
Этот сигнал поступает на счетный вход (вход С) первого счетчика импульсов 20. На первом (младшем) разряде первого счетчика импульсов (первой его части) 20 сформируется импульс с единичным логическим уровнем, начинающийся с момента появления фронта нарастания первого импульса прямоугольных колебаний, а заканчивающегося фронтом нарастания его второго импульса (эпюра "г" на фиг.2), поступающий на вход второй части первого счетчика импульсов 20, срабатывающего по фронту спада. Таким образом, на неинвертированном выходе первого счетчика импульсов (второй его части) 20 сформируется разовый перепад логических уровней из нулевого в единичный в момент наличия фронта нарастания второго импульса прямоугольных колебаний. Этот инвертированный перепад (из единичного уровня в нулевой), поступающий на первый вход трехвходовой логической схемы 11, нулевым логическим уровнем запретит прохождение импульсов с ее выхода на счетный вход первого счетчика импульсов 20 до конца полета ракеты.
Перепад логических уровней из нулевого в единичный с неинвертированного выхода первого счетчика импульсов 20 поступает на первый вход первой логической схемы И 28, на второй вход которой поступают импульсы прямоугольных колебаний с выхода второго компаратора 6. На выходе первой логической схемы И сформируется последовательность импульсов прямоугольных колебаний, начинающаяся со второго импульса (эпюра "г" на фиг.2).
Этот сигнал с выхода первой логической схемы И 28 (его фронты нарастания) поступает на вход С (вход записи) первого D триггера 12 и осуществляет деление частоты импульсов на два. При этом на его выходе формируются поочередно разнополярные импульсы (с единичными и нулевыми логическими уровнями), длительности которых равны Ti, где i=2, 3, 4 и т.д. Эти импульсы поступают через четвертую задержку 21 на первый вход первой логической схемы исключающее ИЛИ 29, на второй вход которой поступает не задержанный сигнал с выхода первого D триггера 12. На выходе первой логической схемы исключающее ИЛИ 29 сформируются импульсы с единичными логическими уровнями, следующие с интервалом Ti и имеющие длительность, равную времени задержки.
Сигнал с выхода первой логической схемы исключающее ИЛИ 29 поступает на R вход первого RS триггера 13 и выставляет на его выходе нулевой логический уровень, который поступает на первый вход третьей логической схемы И 22 и запрещает прохождение импульсов с синхронизатора (с ее второго входа) на ее выход. Одновременно импульсный сигнал с выхода первой логической схемы исключающее ИЛИ 29 поступает на вход первой задержки 14, а с ее выхода - на вход С (вход записи) второго регистра 39, в который по входу D записывается информация (величина двоичного числа) с выхода второго счетчика импульсов 30. Причем, как отмечалось выше, в данный момент времени на счетный вход (вход С) второго счетчика импульсов 30 импульсы с выхода второй логической схемы И 22 не поступают, и он находится в состоянии хранения величины Ti. Импульсный сигнал с выхода первой задержки 14 поступает на вход второй задержки 23, с выхода которой он поступает на R вход второго счетчика импульсов 30 и устанавливает на его выходных разрядах нулевые логические уровни. Кроме того, импульсный сигнал с выхода второй задержки 23 поступает на вход третьей задержки 31, с выхода которой он поступает на S вход первого RS триггера 13 и выставляет на его выходе единичный логический уровень, который разрешает прохождение импульсов со второго входа третьей логической схемы И 22 на вход С второго счетчика импульсов 30.
Второй счетчик импульсов 30 начинает считать количество импульсов, поступающих на его вход С до момента поступления следующего импульса на R входе первого RS триггера 13. После чего процесс счета многократно повторяется. При этом данный процесс начинается с момента появления фронта нарастания второго импульса (эпюра "г" на фиг.2), который записывает во второй регистр 39 случайную величину двоичного числа с выхода второго счетчика импульсов 30. Данная запомненная начальная величина случайного двоичного числа не используется при измерении временных интервалов, поскольку отсчет измеряемых временных интервалов начинают с T2.
Сигнал с выхода первой задержки 14, представляющий импульсы, поступающие на вход записи второго регистра 39, также поступает на первый вход второй логической схемы 37, на второй вход которой поступает в исходном состоянии единичный логический уровень с инвертированного выхода третьего счетчика импульсов 36, который пропускает только первый и второй импульсы с первого входа второй логической схемы И 37 на счетный вход третьего счетчика импульсов 36.
На выходе третьего счетчика импульсов 36 сформируется разовый скачок логического уровня из нулевого состояния в единичное, при котором сформированный фронт нарастания совпадает с фронтом нарастания импульса записи, записывающим величину длительности T2 в первый регистр 38.
Таким образом, разовый скачок напряжения с выхода третьего счетчика импульсов 36 (совместно с второй логической схемой И 37, функционирующие аналогично, как и в первом счетчике импульсов 20 с третьевходовой логической схемой И 11), поступает на вход записи первого регистра 38 и записывает в него только величину длительности T2 в двоичном коде, которая сохраняется до конца полета ракеты.
После выхода бортового источника питания на рабочий режим устройство установки 1 формирует разовый импульс, который поступает также на первый вход измерителя временной задержки 9, а именно на первый вход первой логической схемы ИЛИ 15, с выхода которой - на R вход третьего D триггера 24 и устанавливает на его выходе нулевой логический уровень. Кроме того, разовый импульс с выхода устройства установки 1 поступает на R вход четвертого счетчика импульсов 40 и устанавливает его выходные разряды в нулевое логическое состояние. В момент прихода разового скачка напряжения из нулевого уровня в единичный с первого выхода измерителя временного интервала 8 (с выхода первого счетчика импульсов 20) на вход С третьего D триггера 24 (второй вход измерителя временной задержки 9) на выходе третьего D триггера 24 изменится логический уровень из нулевого в единичный.
Сигнал, близкий к меандру, с выхода первого компаратора 4 поступает на третий вход измерителя величины задержки 9, а именно на С вход второго D триггера 16, который срабатывает по фронтам нарастания данного сигнала. При этом на его выходе формируются импульсы поочередно с единичными и нулевыми уровнями, длительности которых равны временным интервалам между фронтами нарастания соседних импульсов (эпюра "а" на фиг.2), т.е. между 1' и 2', 2' и 3' и т.д.
Эти импульсы поступают через пятую задержку 25 на первый вход второй логической схемы исключающее ИЛИ 33, на второй вход которой поступает не задержанный сигнал. На выходе второй логической схемы исключающее ИЛИ 33 сформируются импульсы с единичными логическими уровнями, имеющие длительность, равную времени задержки, каждый из которых соответствует передним фронтам импульсов 1', 2', 3' и т.д.
Импульсный сигнал с выхода второй логической схемы исключающее ИЛИ 33 поступает на первый вход четвертой логической схемы И 41, на второй вход которой поступает разовый перепад напряжения из нулевого уровня в единичный, соответствующий моменту формирования фронта нарастания второго импульса (эпюра "г" на фиг.2) со второго входа измерителя временной задержки 9 (первый выход измерителя временных интервалов 8). На выходе четвертой логической схемы И 41 выделятся импульсы, соответствующие фронтам импульсов 2', 3' 4' и т.д. (эпюра "а" на фиг.2), которые поступают на второй вход первой логической схемы ИЛИ 15. Первый из них с выхода первой логической схемы ИЛИ 15, поступающий на R вход третьего D триггера 24, установит на его выходе нулевой логический уровень.
Таким образом, на выходе третьего D триггера 24 сформируется одиночный импульс длительностью Δt (эпюра "д" на фиг.2), величина которой соответствует разности фаз Δφ (эпюра "в" на фиг.2), на величину которой фронт нарастания импульса 2 опережает фронт нарастания импульса 2'. Этот одиночный импульс с выхода третьего D триггера 24 поступает на первый вход пятой логической схемы И 32, на второй вход которой поступает импульсный сигнал (с синхронизатора) с частотой F. На выходе пятой логической схемы И 32 формируется пачка импульсов длительностью Δt, поступающая на четвертый счетный вход (вход С) счетчика импульсов 40, который был установлен ранее в нулевое состояние. Четвертый счетчик импульсов 40 считает количество импульсов и по окончанию счета сохраняет на выходе до конца полета ракеты двоичное число, величина которого соответствует величине Δt.
Запомненное двоичное число в четвертом счетчике импульсов 40 с его выхода через выход измерителя величины задержки 9 подается на первый вход формирователя корректированного сигнала 10, являющегося первым входом делителя чисел 45, на второй вход которого подается двоичное число с выхода первого регистра 38 (со второго выхода измерителя временных интервалов 8 через второй вход формирователя корректированного сигнала 10). В делителе чисел 45 делится величина задержки Δt (двоичное число) на двоичное число длительности временного интервала T2. Образуемый результат деления Δt/T2=N остается неизменным до конца полета ракеты так же, как и два числа на соответствующих входах делителя чисел 45.
Далее число N с выхода делителя чисел 45 поступает на первый вход умножителя чисел 46, на второй вход которого поступают поочередно двоичные числа, соответствующие Ti с выхода второго регистра 39 (с третьего выхода измерителя временных интервалов 8 через третий вход формирователя корректированного сигнала 9). На выходе умножителя чисел 46 образуются двоичные числа, равные N·Ti.
Двоичное число с выхода умножителя чисел 46 поступает на первый вход (вход А) первого цифрового компаратора 47. На второй вход (В) которого поступает изменяемое (увеличивающееся с нуля) число с выхода второго счетчика импульсов 30 измерителя временных интервалов 8 (через четвертый его выход на четвертый вход формирователя корректирующего сигнала 10), приведенные в аналоговом виде на эпюрах "и1", "и2" и "и3" фиг.3 (при различных величинах соответственно сигналов А и В).
Таким образом, величина предыдущего запомненного двоичного числа Ti сравнивается с текущей величиной двоичного числа, линейно увеличивающегося с нулевого значения до величины, соответствующей длительности Ti+1. При Ti>Ti+1 (A>В) на выходе QA>В первого цифрового компаратора 47 формируется единичный логический уровень, а при Ti<Ti+1 (А<В) - нулевой (эпюра "е" на фиг.2, а также "e1" на фиг.3). На выходе QA=В первого цифрового компаратора 47 формируются импульсы с единичным логическим уровнем (эпюры "к1", "к2" и "к3" на фиг.3) кроме случая, приведенного в конце эпюр "е2" и "к2" на фиг.3 и который требуется устранить. Это следует из того, что в данном случае отсутствует сигнал, несущий информацию о величине временной задержки.
В связи с изложенным, сигнал с выхода QA=В первого цифрового компаратора 47 поступает на первый вход второй логической схемы ИЛИ 43, на второй вход которой поступает сигнал с выхода седьмой логической схемы И 42. Импульсный сигнал с выхода первой логической схемы исключающее ИЛИ 29 (с пятого выхода измерителя временного интервала 8) поступает на пятый вход формирователя корректированного сигнала 10, а с него на первый вход седьмой логической схемы И 42. На второй вход седьмой логической схемы И 42 поступает сигнал с выхода QA>В первого цифрового компаратора 47.
Таким образом, в моменты наличия импульсов с единичным логическим уровнем на первом входе седьмой логической схемы И 42 (формируемых первой логической исключающее ИЛИ 29 в момент остановки счета импульсов во втором счетчике импульсов 30, т.е. до момента записи информации во второй регистр 39) на ее втором входе будет нулевой логический уровень (эпюры "e1" и "е3" фиг.3). При этом сигнал на выходе седьмой логической схемы И 42 будет отсутствовать.
Аналогично и для сигналов, приведенных на эпюре "и2" фиг.3, за исключением ее окончания, где приведен пример нарастания сигнала на выходе второго счетчика импульсов 30 при, например, T5<(T2=Δt). В этом случае на выходе QA>В первого компаратора 47 будет логическая единица, и импульс с единичным логическим уровнем с первого входа седьмой логической схемы И 42 (с выхода первой логической схемы исключающее ИЛИ 29) пройдет на ее выход. При этом будет сформирован импульсный сигнал, отсутствующий на первом входе второй логической схемы ИЛИ 43, который пройдет на ее выход.
Следовательно, первый цифровой компаратор 47 на выходе QA>В (эпюры "е" на фиг.2, а также "e1" на фиг.3) формирует импульсы τi+1, равные по длительности N·Ti, начало которых совпадает с фронтом нарастания сигнала на выходе второго компаратора 6, а конец совпадает с фронтом нарастания сигнала на выходе первого компаратора 4 (эпюра "а" на фиг.2) до момента времени ограничивающим функционирование гироскопического датчика угла крена 3 (эпюры "е" на фиг.2). При этом задние фронты импульсов τi+1 с единичными логическими уровнями совпадают с импульсами, формируемыми на выходе второй логической схемы ИЛИ 43. Причем разные длительности временных интервалов τ3, τ4, τ5, τ6, τ7 и т.д. (эпюра "е" на фиг.2) соответствуют одинаковым угловым интервалам Δφ3, Δφ4, Δφ5, Δφ6, Δφ7 и т.д. (эпюра "в" на фиг.2).
Сигнал, соответствующий фронтам спада, с выхода второй логической схемы ИЛИ 43 поступает на R вход второго RS триггера 18 и выставляет на его выходе нулевой логический уровень, который поступает на первый вход шестой логической схемы И 26 и запрещает прохождение импульсов с ее второго входа (с выхода синхронизатора) на выход. Одновременно импульсный сигнал с выхода второй логической схемы ИЛИ 43 поступает на вход шестой задержки 34, а с ее выхода - на вход С (вход записи) третьего регистра 44, в который по входу D записывает информацию (величину двоичного числа) с выхода пятого счетчика импульсов 27.
Импульсный сигнал с выхода шестой задержки 34 поступает также на вход седьмой задержки 19, с выхода которой - на R вход пятого счетчика импульсов 27 и устанавливает на его выходных разрядах нулевые логические уровни. Кроме того, импульсный сигнал с выхода седьмой задержки 19 поступает на вход восьмой задержки 17, с выхода которой он поступает на S вход второго RS триггера 18 и выставляет на его выходе единичный логический уровень, который разрешает прохождение импульсов со второго входа шестой логической схемы И 26 на вход С пятого счетчика импульсов 27. После чего процессы счета и записи повторяются вновь.
Таким образом, на выходе пятого счетчика импульсов 27 формируется в двоичном коде записываемая (перезаписываемая) в третий регистр 44 величина следования временных интервалов 
Следовательно, записанная величина длительности временного интервала в третьем регистре 44 является ½ величины предыдущей его длительности. Эта величина в двоичном коде поступает на первый вход второго цифрового компаратора 35, на второй вход которого поступает двоичное число с выхода пятого счетчика импульсов 27, являющееся текущей величиной последующего временного интервала, начинающегося с нуля.
До превышения величины последующего временного интервала запомненной величины в регистре 44, на выходе второго цифрового компаратора 35 формируется единичный логический уровень τ4', τ5', τ6' и т.д. (эпюра "ж" на фиг.2), а после превышения - нулевой. Данный скорректированный сигнал по запаздыванию (фазе) и скважности на момент его коррекции повторяет по начальной фазе и скважности сигнал, близкий к меандру.
Этот корректированный сигнал поступает на второй коммутируемый вход электронного ключа 5, который отключает сигнал угла крена ракеты, близкий к меандру, и подключает сигнал с длительностью импульсов
Величину заданного времени срабатывания t2 определяет продолжительность работы гироскопического датчика угла крена 3 до момента времени, когда он начинает вносить фазовую ошибку, связанную с уходом оси гироскопа относительно ее первоначального положения на момент разарретирования. Данную конкретную величину выбирают при обработке статистических данных величин фазовых ошибок.
Следовательно, предлагаемая группа изобретений способ измерения угла крена ракеты, регулярно вращающейся по углу крена, и датчик угла крена ракеты для его осуществления не ограничивает время работы и дальность полета управляемой ракеты.
Группа изобретений относится к ракетной технике. В способе осуществляют измерение угла крена гироскопическим датчиком угла крена и преобразование его в сигнал, близкий к меандру, с периодом повторения, соответствующим 360°. Этот сигнал формируют на выходе устройства измерения угла крена ракеты. Сигнал датчика магнитного поля Земли на ракете с периодом повторения, соответствующим 360°, в соответствии с его полярностью преобразуют в прямоугольные колебания. В первоначальный заданный момент времени t1 исключают первый импульс прямоугольных колебаний и, начиная с выбранных фронтов нарастания или спада второго, измеряют длительности временных интервалов между ними. Запоминают каждую измеренную величину предыдущего временного интервала Ti до времени окончания счета последующего интервала Ti+1, где i=2, 3, 4 и т.д. Измеряют длительность временного интервала Δt между выбранным фронтом второго импульса прямоугольных колебаний и аналогичным фронтом ближайшего отстающего от него сигнала, близкого к меандру. Вычисляют коэффициент N=Δt/T2 и запоминают его до конца полета ракеты. Формируют импульсы длительностями τi+1=N·Ti, отсчитываемыми от выбранных фронтов импульсов прямоугольных колебаний, начиная с третьего. Измеряют временные интервалы 

1. Способ измерения угла крена ракеты, регулярно вращающейся по углу крена, включающий измерение угла крена гироскопическим датчиком угла крена и преобразование его в сигнал, близкий к меандру, с периодом повторения, соответствующим 360°, который формируют на выходе устройства измерения угла крена ракеты, отличающийся тем, что дополнительно используют на ракете датчик магнитного поля Земли, сигнал которого с периодом повторения, соответствующим 360°, в соответствии с его полярностью преобразуют в прямоугольные колебания, в первоначальный заданный момент времени t1 исключают первый импульс прямоугольных колебаний и, начиная с выбранных фронтов нарастания или спада второго, измеряют длительности временных интервалов между ними, запоминают каждую измеренную величину предыдущего временного интервала Ti до времени окончания счета последующего Ti+1, где i=2, 3, 4 и т.д., измеряют длительность временного интервала Δt между выбранным фронтом второго импульса прямоугольных колебаний и ближайшего отстающего от него аналогичного фронта сигнала, близкого к меандру, вычисляют коэффициент N=Δt/T2 и запоминают его до конца полета ракеты, формируют импульсы длительностями τi+1=N·Ti, отсчитываемыми от выбранных фронтов импульсов прямоугольных колебаний, начиная с третьего, измеряют временные интервалы 

2. Датчик угла крена ракеты, регулярно вращающейся по крену, содержащий таймер и последовательно соединенные гироскопический датчик угла крена и первый компаратор, отличающийся тем, что он снабжен электронным переключателем, измерителем временных интервалов, последовательно соединенными датчиком магнитного поля Земли и вторым компаратором, а также последовательно соединенными устройством установки, измерителем временной задержки и формирователем корректированного сигнала, при этом выход устройства установки соединен с первым входом измерителя временных интервалов, второй и третий входы которого соединены с выходами соответственно второго компаратора и таймера, второй вход измерителя временной задержки соединен с первым выходом измерителя временных интервалов, второй, третий, четвертый и пятый выходы которого соединены соответственно со вторым, третьим, четвертым и пятым входами формирователя корректированного сигнала, выход первого компаратора соединен с третьим входом измерителя временной задержки и первым коммутируемым входом электронного переключателя, второй коммутируемый вход которого соединен с выходом формирователя корректированного сигнала, управляющий вход электронного переключателя соединен с выходом задатчика времени переключения.
3. Датчик угла крена ракеты по п.2, отличающийся тем, что измеритель временных интервалов содержит последовательно соединенные первую, вторую и третью задержки, выход которой соединен с S входом первого RS триггера, а также трехвходовую логическую схему И, выход которой соединен с C входом первого счетчика импульсов, инвертированный выход которого соединен с первым входом трехвходовой логической схемы И, а также первый и второй регистры, первую, вторую и третью логические схемы И, второй и третий счетчики импульсов, при этом выход первой логической схемы И соединен с C входом первого D триггера, инвертированный выход которого соединен с его D входом, а не инвертированный выход соединен через четвертую задержку с первым входом первой логической схемы исключающее ИЛИ, второй вход которой соединен с выходом первого D триггера, выход первой задержки соединен с входом С второго регистра и первым входом второй логической схемы И, выход второй задержки соединен с R входом второго счетчика импульсов, выход первого RS триггера соединен с первым входом третьей логической схемы И, выход которой соединен с С входом второго счетчика импульсов, вход С первого регистра соединен с не инвертированным выходом третьего счетчика импульсов, инвертированный выход которого соединен со вторым входом второй логической схемы И, выход которой соединен с С входом третьего счетчика импульсов, второй вход третьей логической схемы И соединен с выходом синхронизатора, при этом объединенные вместе R входы первого и третьего счетчиков импульсов являются первым входом измерителя временных интервалов, вторым входом которого являются второй вход трехвходовой логической схемы И и второй вход первой логической схемы И, третий вход трехвходовой логической схемы И является третьим входом измерителя временных интервалов, первым выходом которого является не инвертированный выход первого счетчика импульсов, соединенный с первым входом первой логической схемы И, выходы первого и второго регистров являются соответственно вторым и третьим выходами измерителя временных интервалов, четвертым выходом которого является выход второго счетчика импульсов, соединенный с D входами первого и второго регистров, а выход первой логической схемы исключающее ИЛИ, соединенный с R входом первого RS триггера и входом первой задержки, является пятым выходом измерителя временных интервалов.
4. Датчик угла крена ракеты по п.2, отличающийся тем, что измеритель временной задержки содержит последовательно соединенные пятую задержку, вторую логическую схему исключающее ИЛИ и четвертую логическую схему И, а также второй D триггер, инвертированный выход которого соединен с его D входом, а не инвертированный - со вторым входом второй логической схемы исключающее ИЛИ и входом пятой задержки, выход четвертой логической схемы И соединен со вторым входом первой логической схемы ИЛИ, выход которой соединен с R входом третьего D триггера, соединенного D входом с источником логической единицы, выход третьего D триггера соединен с первым входом пятой логической схемы И, второй вход которой соединен с выходом синхронизатора, а выход - с С входом четвертого счетчика импульсов, при этом первый вход первой логической схемы ИЛИ, соединенный с R входом четвертого счетчика импульсов, является первым входом измерителя временной задержки, вторым входом которого является С вход третьего D триггера, соединенный со вторым входом четвертой логической схемы И, вход С второго D триггера является третьим входом измерителя временной задержки, выходом которого является выход четвертого счетчика импульсов.
5. Датчик угла крена ракеты по п.2, отличающийся тем, что формирователь корректированного сигнала содержит последовательно соединенные делитель чисел, умножитель и первый цифровой компаратор, а также последовательно соединенные вторую логическую схему ИЛИ, шестую, седьмую и восьмую задержки, выход восьмой задержки соединен с S входом второго RS триггера, а выход седьмой задержки соединен с R входом пятого счетчика импульсов, выход шестой задержки соединен с С входом третьего регистра, выход второй логической схемы ИЛИ соединен с R входом второго RS триггера, выход которого соединен с первым входом шестой логической схемы И, второй вход которой соединен с выходом синхронизатора, а ее выход подключен к входу С пятого счетчика импульсов, выход третьего регистра соединен с первым входом второго цифрового компаратора, выход пятого счетчика импульсов соединен со вторым входом первого цифрового компаратора и подключен за исключением младшего разряда к D входу третьего регистра, выход QA=B первого цифрового компаратора соединен с первым входом второй логической схемы ИЛИ, второй вход которой соединен с выходом седьмой логической схемы И, выход QA>B первого цифрового компаратора соединен со вторым входом седьмой логической схемы И, при этом первый и второй входы делителя чисел являются соответственно первым и вторым входами формирователя корректированного сигнала, третьим и четвертым входами которого являются вторые входы соответственно умножителя чисел и первого цифрового компаратора, первый вход седьмой логической схемы И является пятым входом формирователя корректированного сигнала, выходом которого является выход второго цифрового компаратора.
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТЫ, СИСТЕМА НАВЕДЕНИЯ И ПОЗИЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2406962C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ РАКЕТОЙ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242698C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ ИМПУЛЬСОВ НА РАКЕТЕ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И СИНУС-КОСИНУСНЫЙ ПРЕОБРАЗОВАТЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТОЙ | 2007 |
|
RU2351875C2 |
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |

