Изобретение относится к области радиотехники и может быть использовано в системах радиомониторинга, в том числе радиолокации, для повышения эффективности отождествления радиосигналов с источниками радиоизлучения (ИРИ) в многоцелевой обстановке.
Повышение вероятности правильного отождествления сигналов к одному и тому же ИРИ, точности определения результирующих параметров сигналов и координат ИРИ обеспечивается за счет определения с заданной вероятностью размеров многомерного строба отождествления на основе учета как дисперсий измеряемых параметров – координат состояния обнаруженных и сопровождаемых ИРИ, так и корреляции между измеряемыми параметрами, с последующим определением результирующих параметров радиосигналов и координат ИРИ в масштабе времени, близком к реальному.
Известен способ отождествления пеленгов источников радиоизлучений по их радиотехническим характеристикам [Кваснов А.В. Способ отождествления источников радиоизлучений по их радиотехническим характеристикам двухпозиционными пассивными радиоэлектронными средствами. Патент РФ №2656370, G01S 3/72], заключающийся в том, что для принятого сигнала от ИРИ создается формуляр цели, где записывается информация о величине радиотехнического параметра и пеленге, на котором обнаружен объект. После этого производится совместная обработка формуляров цели, полученных на разных позициях пассивными радиоэлектронными средствами. Отождествление пеленгов ИРИ производится путем сличения формуляров, принятых от двух разнесенных радиоэлектронных средств по их радиотехническим характеристикам. Для этого используются две выборки одного из радиотехнических параметров, полученных за время наблюдения объекта первой и второй пассивными станциями. Отождествление осуществляется на основании t-критерия Стьюдента, позволяющего проверять равенства средних значений в двух выборках. В результате устанавливается факт принадлежности одного источника радиоизлучения двум наблюдающим станциям, либо утверждается, что наблюдаются две различные станции. Процедура повторяется для всех пар обнаруженных ИРИ первым и вторым радиоэлектронным средством.
Данный способ предполагает наличие многократных измерений радиотехнических параметров сигналов ИРИ и вычислений средних, и дисперсий их измерений по выборке конечного объема. Однако во многих практических ситуациях в системах радиомониторинга имеется необходимость в отождествлении во времени результатов однократных измерений нескольких параметров, что не может быть реализовано с помощью указанного способа. С уменьшением измеренных параметров показатели достоверности отождествления ухудшаются, кроме того, способ предполагает неизменность во времени истинных значений измеряемых параметров в течение всей серии измерений, что также является ограничением применимости способа.
Наиболее близким по технической сущности к предлагаемому является способ стробового отождествления сигналов с источниками радиоизлучений [В.С. Верба, А.В. Васильев, В.Б. Гребенников, А.А. Косогор, Е.Л. Логвиненко, В.И. Меркулов, А.Г. Тетеруков. Способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке. Патент РФ №2557784, G01S 5/06], принятый за прототип.
Способ-прототип включает следующие операции.
1. Формирование вектора оценок n координат состояния обнаруженных и сопровождаемых ИРИ на текущий k-й момент времени,

Оценки координат состояния всех обнаруженных ИРИ являются известными и получены на k-й момент времени по результатам предыдущих измерений.
2. Для каждого j-го ИРИ формируют вектор приращения координат состояния ИРИ, равный разности текущего измеренного в k-й момент времени вектора координат состояния 


Сигналы ИРИ поступают на станцию радиотехнической разведки (СРТР) в общем случае не одновременно, а результаты измерений определяются моделью:

k – номер дискрета времени,


За время, равное 

3. Определение размеров строба, гарантирующих требуемую достоверность отождествления пеленгов. Размер строба 

где 


4. Принятие решения об отождествлении сигнала с j-м ИРИ при условии выполнения неравенства во всем n координатам:

Если условие (4) не выполняется хотя бы по одной из n координат, то проверяется выполнение этого условия для следующего экземпляра сопровождаемого ИРИ в соответствии с выражением:

Если условие (4) не выполняется, то проверяется выполнение этого условия для следующего экземпляра сопровождаемого ИРИ.
Результат отождествления представляется в виде вектора:


Если условие не выполняется ни для одного из обнаруженных (сопровождаемых) ИРИ, то принимается решение об обнаружении нового ИРИ, т.е. j*=N+1.
Недостатки способа-прототипа заключаются в следующем.
Отождествление выполняется по стробам векторов признаков, включающих координаты ИРИ. При этом компоненты вектора считаются не коррелированы, а отождествление основано на независимой проверке выполнения неравенства (4) для каждой компоненты вектора признаков. Однако, в общем случае среди измеряемых параметров сигнала и координат ИРИ имеются взаимно коррелированные параметры.
В частности, коррелированными измеряемыми параметрами ИРИ являются X-и Y-компоненты координат местоположения ИРИ. Корреляция между данными параметрами обусловлена реализованным способом определения координат ИРИ. В случае триангуляционного способа матрица корреляции X-и Y-компонент координат ИРИ является недиагональной матрицей, а ее элементы зависят как от параметров взаимного расположения ИРИ и пунктов пеленгования, так и от дисперсий ошибок пеленгования в каждом из пунктов. В случае разностно-дальномерного способа элементы матрицы корреляции X-и Y-компонент координат ИРИ зависят как от параметров взаимного расположения ИРИ и пунктов синхронного приема радиосигналов, так и от дисперсий ошибок измерения разностей времен прихода сигналов между пунктами. Из-за корреляции между измеряемыми параметрами размеры строба отождествления должны определяться исходя из матрицы корреляции параметров по критерию обеспечения требуемой вероятности правильного отождествления. В прототипе используется строб отождествления вида многомерного гиперпрямоугольника (фигуры, обобщающей понятие «прямоугольник», на случай многомерного пространства), при котором область отождествления по X-и Y-компонентам координат ИРИ является прямоугольной. Однако, наличие корреляции между этими компонентами обуславливает эллиптичность данной области, параметры ориентации которой определяются параметрами взаимного расположения ИРИ и пунктов измерения параметров положения ИРИ (пеленгов на ИРИ, задержек времени прихода радиосигнала), а величины полуосей определяются требуемой вероятностью отождествления по данным параметрам, исходя из дисперсий измерения параметров положения.
Представление строба в виде гиперпрямоугольника ввиду игнорирования тем самым наличия корреляционных связей между измеряемыми параметрами в общем случае приводит к ошибкам в определении формы и размера строба. Возможны ситуации, когда при использовании согласно прототипу гиперпрямоугольного строба, отождествления результата измерения с ИРИ не произойдет, однако при использовании строба более корректной формы с соответствующей коррекцией правила отождествления результаты измерений будут отождествлены с ИРИ. Указанные недостатки определяют снижение вероятности правильного отождествления результатов измерений с ИРИ, и в целом, приводят к снижению показателей эффективности радиомониторинга в многоцелевой обстановке.
Задачей, на решение которой направлено предлагаемый способ, является повышение эффективности стробового отождествления сигналов с источниками радиоизлучения в системах радиомониторинга.
Для решения поставленной задачи в способе стробового отождествления сигналов с источниками радиоизлучения (ИРИ) в многоцелевой обстановке, включающий формирование по результатам предыдущих измерений вектора оценок n координат состояния обнаруженных и сопровождаемых ИРИ на текущий k-й момент времени, формирование для каждого j-го ИРИ вектора приращения координат состояния ИРИ, принятие решения об отождествлении сигнала с j-м ИРИ при условии выполнения неравенства, в противном случае – проверку выполнение этого условия для следующего экземпляра сопровождаемого ИРИ, в случае не выполнения условия ни для одного из ИРИ – принятие решения об обнаружении нового ИРИ, представление результата отождествления в виде вектора, отличающийся тем, что формируют величину 

где 

гарантирующего требуемую достоверность отождествления и соответствующего нахождению вектора приращения координат состояния ИРИ в пределах строба вида многомерного эллипсоида, учитывающего корректным образом наличие корреляции между измеряемыми параметрами, где 

n – количество измеряемых параметров, 
Повышение вероятности правильного отождествления сигналов к одному и тому же ИРИ, точности определения результирующих параметров сигналов и координат ИРИ обеспечивается за счет определения с заданной вероятностью размеров многомерного строба отождествления на основе учета как дисперсий измеряемых параметров – координат состояния обнаруженных и сопровождаемых ИРИ, так и корреляции между измеряемыми параметрами, с последующим определением результирующих параметров радиосигналов и координат ИРИ в масштабе времени, близком к реальному.
Предлагаемый способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке включает следующие операции.
Предполагается, что оценки координат состояния всех обнаруженных ИРИ

являются известными и получены на k-й момент времени по результатам предыдущих измерений для каждого j-го ИРИ, 
Вектор истинных значений измеряемых параметров в k-й момент времени зависит от истинных значений вектора в (k-1)-й момент времени, вектора скорости изменения истинных значений параметров
и интервала времени между измерениями 

Приращение вектора оценки координат:

или

где 

В большинстве практических ситуаций адекватным является гауссовская модель ошибок измерений, в рамках которой векторы шумов измерений являются центрированными, 




Тогда для разности векторов 



Шумы измерений в различные моменты времени можно считать статистически независимыми, что для гауссовских величин означает их некоррелированность, т.е. 

Здесь, как и в прототипе, отметим, что численные значения матрицы 
вытекающему из соотношения (6) при вычислении производной методом конечных разностей:
Для неподвижных и малоподвижных ИРИ (изменение координат которых за интервал времени между последовательными измерениями обуславливает изменение истинных значений измеряемых параметров на порядок меньше погрешности их измерения) матрицу 
Вектор приращения координат состояния j-го ИРИ удовлетворяет неравенству

или

где
n – количество измеряемых параметров,
Размеры строба 

Решение об отождествлении сигнала с j-м ИРИ принимается при условии выполнения неравенства (10).
Если условие (10) не выполняется, то проверяется выполнение этого условия для следующего экземпляра сопровождаемого ИРИ.
С целью уменьшения вычислительных затрат, в частном случае, когда из n измеряемых параметров коррелированными являются только первые m,m<n, размеры строба для коррелированных параметров можно определять по формуле (12); для некоррелированных параметров – по формуле (2). В этом случае принимается решение об отождествлении сигнала с ИРИ, если для всех коррелированных параметров с порядковыми номерами 


где 


Результат отождествления представляется в виде вектора:

Таким образом, способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке осуществляется следующим образом:
1. Формируется вектор оценок n координат состояния обнаруженных и сопровождаемых ИРИ на текущий k-й момент времени,

Оценки координат состояния всех обнаруженных ИРИ являются известными и получены на k-й момент времени по результатам предыдущих измерений.
2. Для каждого j-го ИРИ формируют вектор приращения координат состояния ИРИ, равный разности текущего измеренного в k-й момент времени вектора координат состояния 

3. Формируют величину 

где 

4. Принимают решение об отождествлении сигнала с j-м ИРИ при условии выполнения неравенства (10):
гарантирующего требуемую достоверность отождествления и соответствующего нахождению вектора приращения координат состояния ИРИ в пределах строба вида многомерного эллипсоида, учитывающего корректным образом наличие корреляции между измеряемыми параметрами, где
n– количество измеряемых параметров,
Если условие (10) не выполняется, то проверяется выполнение этого условия для следующего экземпляра обнаруженных (сопровождаемых) ИРИ в соответствии с выражением:

Результат отождествления представляется в виде вектора:

Если условие (10) не выполняется ни для одного из обнаруженных (сопровождаемых) ИРИ, то принимается решение об обнаружении нового ИРИ, т.е. j*=N+1.
Предлагаемый способ стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке лишен перечисленных выше недостатков способа-прототипа. Заявляемый способ основан на учете корреляции между измеряемыми параметрами при определении формы и размеров строба. Наличие корреляции между измеряемыми параметрами обуславливает эллиптичность соответствующей этим параметрами области строба. В частности, в случае отождествления координат ИРИ, измеренных триангуляционным либо разностно-дальномерным способом, параметры ориентации эллиптической области строба определяются параметрами взаимного расположения ИРИ и пунктов измерения параметров положения ИРИ (пеленгов на ИРИ либо задержек времени прихода радиосигнала), а величины полуосей определяются требуемой вероятностью отождествления по данным параметрам исходя из дисперсий измерения параметров положения.
Предлагаемый способ справедлив для случая многомерного вектора измеряемых параметров с произвольной матрицей корреляции. В случае, если часть измеряемых параметров являются некоррелированными, с целью снижения вычислительных затрат возможна раздельная проверка попадания измеренных значений некоррелированных параметров между границами строба (вдоль осей параметров многомерного пространства) одновременно с совместной проверкой попадания значений остальных коррелированных параметров, представленных в виде вектора, внутрь области многомерного эллипсоида. Решение об отождествлении принимается лишь в том случае, когда все некоррелированные параметры находятся внутри границ строба вдоль осей данных параметров, и когда вектор коррелированных параметров находится внутри соответствующего многомерного эллипсоида.
Представление строба в виде многомерного эллипсоида, в отличие от вида гиперпрямоугольника, позволяет корректным образом учитывать наличие корреляции между измеряемыми параметрами, определяет в сравнении с прототипом в случае коррелированных измеренных параметров повышение вероятности правильного отождествления результатов измерений с ИРИ, и приводит к повышению показателей эффективности радиомониторинга в целом в многоцелевой обстановке.
Предлагаемый способ обеспечивает стробовое отождествление сигналов с источниками радиоизлучения в многоцелевой обстановке в общем случае наличия корреляции между измеряемыми параметрами, необходимость чего реализуется, в частности, в большинстве практических ситуаций при измерениях координат ИРИ триангуляционным, разностно-дальномерным и комбинированными способами.
В качестве примера рассмотрим случай стробового отождествления результатов определения координат неподвижного ИРИ триангуляционным способом. В этом случае вектор измеряемых параметров содержит две компоненты – X- и Y- компоненты оценок координат местоположения ИРИ. Строб, определяемый неравенством (10) является эллипсом. Точки границы строба удовлетворяют уравнению:

где матрица корреляции 









Укрупненная блок-схема одного из возможных вариантов устройства для реализации предлагаемого способа представлена на фиг. 1, где обозначено:
1 – n-канальный измеритель параметров принимаемых сигналов (И);
2 – устройство сравнения (УС);
3 – бортовая вычислительная система (БВС).
Устройство содержит последовательно соединенные n-канальный измеритель параметров принимаемых сигналов 1, бортовую вычислительную систему 2 и устройство сравнения 3. Вход n-канального измерителя параметров принимаемых сигналов 1 является входом устройства. Второй вход БВС 2 является входом для сигнала текущей оценки координат состояния j-го ИРИ, третий вход БВС 2 – для данных от навигационной системы; четвертый вход БВС 2 подсоединен к выходу устройства сравнения 3, который является выходом всего устройства.
Устройство для реализации заявляемого способа работает следующим образом.
Принимаемые сигналы поступают на измеритель И 1, формирующий в каждый k-й момент времени вектор состояния 





По результатам сравнения в случае выполнения неравенства (10) принимается решение о принадлежности принятых сигналов j*-му ИРИ, либо об обнаружении нового ИРИ с порядковым номером j=N+1. Если условие (10) не выполняется, то проверяется выполнение этого условия для следующего обнаруженного (сопровождаемого) ИРИ.
Если условие (10) не выполняется ни для одного из обнаруженных (сопровождаемых) ИРИ, то принимается решение об обнаружении нового ИРИ, т.е. j*=N+1.
Реализация описанного выше способа позволяет повысить достоверность отождествления сигналов в многоцелевой обстановке и тем самым обеспечивает качественное определение местоположения обнаруживаемых ИРИ и их надежное сопровождение.
Сравнение показателей эффективности предлагаемого способа стробового отождествления сигналов с источниками радиоизлучения в многоцелевой обстановке и способа-прототипа.
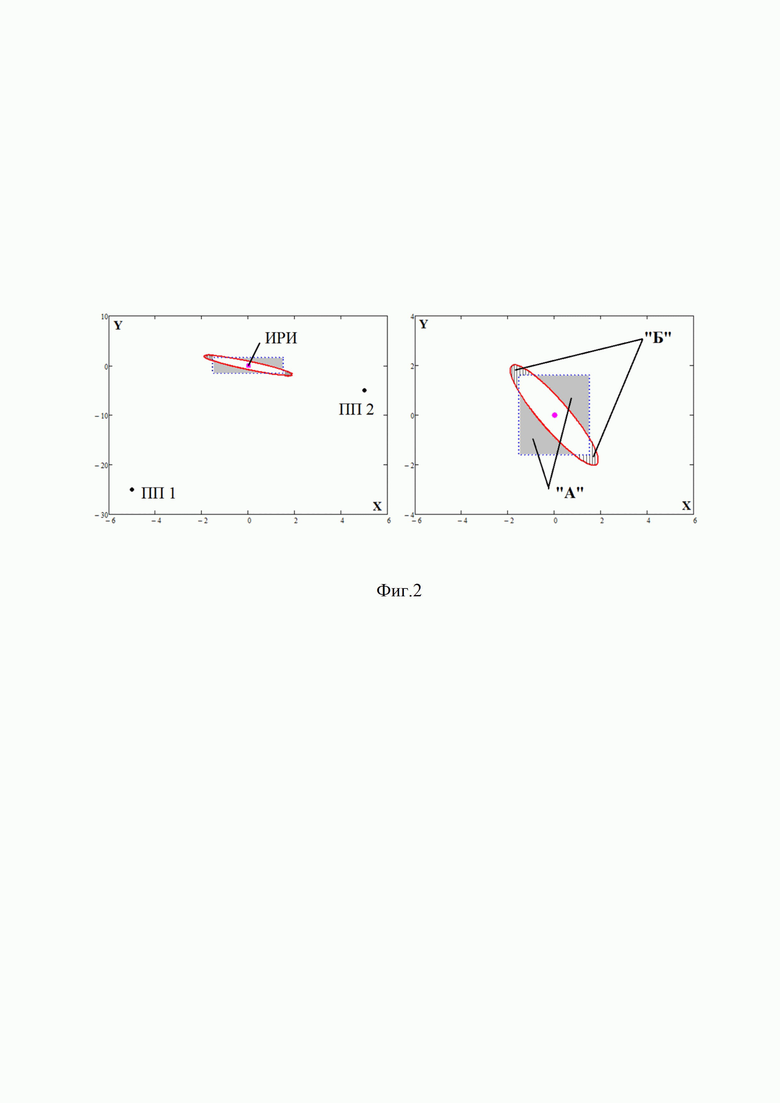
Моделирование предлагаемого способа проведено в программе Matchad. В качестве примера на фиг. 2 изображен прямоугольный строб отождествления, соответствующий способу-прототипу, и эллиптический строб, соответствующий предлагаемому способу. ИРИ находился в точке (0, 0) [км], пункты пеленгования – в точках (-5, -25) [км] и (5, -5) [км]. Заданная вероятность отождествления принималась равной 0,95. Предполагалось, что корреляционная матрица ошибок измерения азимутов является диагональной, 

Сплошным серым цветом выделена область «А» строба прототипа, при попадании в которую результатов измерений координат ИРИ, согласно способу-прототипу, принимаются «ложные» решения об отождествлении. Данные решения являются «ложными», так как из-за наличия корреляции между измерениями они не обеспечивают заданную вероятность отождествления, ограниченную эллипсом.
Штрихами выделена область «Б» строба предлагаемого способа, выходящая за пределы строба прототипа, при попадании в которую результатов измерений координат ИРИ, согласно способу-прототипу решения об отождествлении не принимаются. Однако данная область содержится внутри строба предлагаемого способа и исключение попадающих в нее результатов является ошибочным, что приводит к ложному исключению измерений координат ИРИ.
При использовании предлагаемого способа в обоих рассматриваемых случаях «ложные» решения об отождествлении исключаются, что подтверждает повышение эффективности отождествления предлагаемым способом относительно прототипа.
Следует отметить, что эллиптичная форма строба характерна так же для случая однопунктного определения координат наземного ИРИ с летно-подъемного средства при одновременном совместном пеленговании по азимуту и углу места.
Это определяет целесообразность использования предлагаемого способа отождествления при определении координат указанным способом.
Достигаемый технический результат – повышение вероятности правильного отождествления сигналов к одному и тому же ИРИ, точности определения результирующих параметров сигналов и координат ИРИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| Способ комплексирования пеленга и координат источника радиоизлучения | 2022 |
|
RU2799498C1 |
| Способ обнаружения и азимутального пеленгования наземных источников радиоизлучения с летно-подъемного средства | 2020 |
|
RU2732505C1 |
| Способ определения координат источников радиосигналов с взаимно перекрывающимися спектрами | 2024 |
|
RU2834966C1 |
| Способ пространственного отождествления пеленгов с наземными источниками радиоизлучения | 2020 |
|
RU2731682C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИХ РАДИОТЕХНИЧЕСКИМ ХАРАКТЕРИСТИКАМ ДВУХПОЗИЦИОННЫМИ ПАССИВНЫМИ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ | 2017 |
|
RU2656370C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИХ РАДИОТЕХНИЧЕСКИМ ХАРАКТЕРИСТИКАМ | 2023 |
|
RU2817619C1 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |

Изобретение относится к области радиотехники и может быть использовано в системах радиомониторинга, в том числе радиолокации, для повышения эффективности отождествления радиосигналов с источниками радиоизлучения (ИРИ) в многоцелевой обстановке. Технический результат – повышение вероятности правильного отождествления сигналов к одному и тому же ИРИ, точности определения результирующих параметров сигналов и координат ИРИ. В заявленном способе проводят определение с заданной вероятностью размеров многомерного строба отождествления на основе учета как дисперсий измеряемых параметров – координат состояния обнаруженных и сопровождаемых ИРИ, так и корреляции между измеряемыми параметрами с последующим определением результирующих параметров радиосигналов и координат ИРИ в масштабе времени, близком к реальному. 2 ил.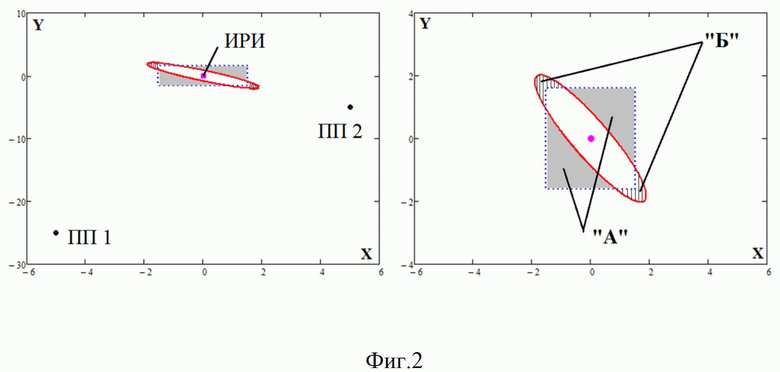
Способ стробового отождествления сигналов с источниками радиоизлучения (ИРИ) в многоцелевой обстановке, включающий формирование по результатам предыдущих измерений вектора оценок n координат состояния обнаруженных и сопровождаемых ИРИ на текущий k-й момент времени, формирование для каждого j-го ИРИ вектора приращения координат состояния ИРИ, проверку условия отождествления вектора состояния с j-м ИРИ, принятие решения об отождествлении при выполнении условия, в противном случае – проверку выполнения условия отождествления для следующего экземпляра сопровождаемого ИРИ, в случае не выполнения условия ни для одного из ИРИ – принятие решения об обнаружении нового ИРИ, представление результата отождествления в виде вектора, отличающийся тем, что формируют величину  по формуле
по формуле
 ,
,
где  – вектор приращения координат состояния j-го ИРИ в k-й момент времени;
– вектор приращения координат состояния j-го ИРИ в k-й момент времени;
 – матрица корреляции вектора ошибок измерения параметров j-го ИРИ;
– матрица корреляции вектора ошибок измерения параметров j-го ИРИ;
 – матрица корреляции производной параметров j-го ИРИ;
– матрица корреляции производной параметров j-го ИРИ;
 – дискрет времени;
– дискрет времени;
 – оператор транспонирования;
– оператор транспонирования;
 – оператор обратной матрицы;
– оператор обратной матрицы;
и принимают решение об отождествлении сигнала с j-м ИРИ при выполнении условия
 ,
,
соответствующего нахождению вектора приращения координат состояния ИРИ в пределах строба вида многомерного эллипсоида, учитывающего наличие корреляции между измеряемыми параметрами, где  определяется в соответствии с формулой
определяется в соответствии с формулой
 ,
,
где n – количество измеряемых параметров;
 – гамма-функция;
– гамма-функция;
 – неполная гамма-функция.
– неполная гамма-функция.
| СПОСОБ СТРОБОВОГО ОТОЖДЕСТВЛЕНИЯ СИГНАЛОВ С ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ В МНОГОЦЕЛЕВОЙ ОБСТАНОВКЕ | 2014 |
|
RU2557784C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИХ РАДИОТЕХНИЧЕСКИМ ХАРАКТЕРИСТИКАМ ДВУХПОЗИЦИОННЫМИ ПАССИВНЫМИ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ | 2017 |
|
RU2656370C1 |
| Способ межпозиционного отождествления результатов измерений и определения координат воздушных целей в многопозиционной радиолокационной системе | 2019 |
|
RU2713193C1 |
| АДАПТИВНЫЙ СПОСОБ ПРОСТРАНСТВЕННОГО ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ С НАЗЕМНЫМИ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2686481C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2562616C1 |
| СПОСОБ ОТОЖДЕСТВЛЕНИЯ ПЕЛЕНГОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ В УГЛОМЕРНЫХ ДВУХПОЗИЦИОННЫХ ПАССИВНЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2004 |
|
RU2253126C1 |
| WO 2011042725 A2, 14.04.2011 | |||
| WO 2005045455 A2, 19.05.2005 | |||
| US 8730091 B2, 20.05.2014 | |||
| JP 2010266228 A, 25.11.2010. | |||

