Предлагаемое изобретение относится к области судовождения - автоматическому управлению движением судна по заданному направлению с выявлением встречных объектов и расхождения с ними. Известно устройство (АС СССР №460535), обеспечивающее автоматическое удержание судна на заданном курсе. Стабилизация курса осуществляется по данным гирокомпаса, который является основным источником информации о направлении движения судна. Сигнал текущего курса и его производная поступают на вход вычислителя, на вход которого поступает также сигнал с датчика угла перекладки руля.
Известна также система автоматического управления движением судна (патент России №2248914, принятый в качестве прототипа). Автоматическое управление движением судна основано на использовании приемника спутниковой навигационной системы, блока заданного значения путевого угла и сумматора, на вход которого поступают сигналы: текущего путевого угла, заданного путевого угла, угловой скорости судна и угла перекладки руля, для формирования закона управления рулевым приводом судна. Выход сумматора подключен к входу рулевого привода.
Существенным недостатком рассмотренных выше систем автоматического управления движением судна является возможность столкновения с встречными объектами.
Для устранения отмеченного недостатка в предлагаемой аппаратуре автоматического управления движением судна обеспечивается выявление встречных судов, с которыми возможно столкновение. После выявления такого встречного объекта аппаратура определяет требуемую корректировку в направлении движения судна, при которой будет исключена возможность столкновения, и изменяет направление движения судна. Через время прохождения судном точки пересечения корректированных траекторий (или минимальной точки сближения с встречным объектом) отключается коррекция, и судно выводит к прежнему маршруту движения.
Для решения поставленной задачи в предлагаемую аппаратуру дополнительно вводят:
- блок программного управления,
- радар (выдающий сигналы вектора расстояния от судна до встречного объекта),
- вычислитель, в котором формируют сигналы текущей широты, долготы и вектор скорости движения встречного объекта, будущие траектории движения судна и встречного объекта и величину коррекции к заданному путевому углу.
Для формирования закона управления рулевым приводом к входу сумматора подключают блоки:
- приемник СНС,
- датчик угловой скорости судна,
- датчик угла руля,
- задатчик путевого угла,
- программного управления.
Выход сумматора подключают к рулевому приводу.
Целью предлагаемой аппаратуры является обеспечение автоматического расхождения судна с встречным объектом путем:
- определения в ограниченной акватории движения судна встречного объекта, с которым возможно столкновение,
- нахождение минимально возможной величины отклонения судна от заданного направления движения «ΔПУзд», при котором будет исключена возможность будущего столкновения с встречным объектом,
- автоматического перевода судна на новое направление движения ПУзд+ΔПУзд (с отключением задатчика путевого угла от сумматора),
- автоматическое отключение ПУзд+ΔПУзд и подключение задатчика путевого угла к сумматору после окончания режима расхождения для выхода судна в дальнейшем на заданную траекторию движения.
Рассмотрим, как реализуется поставленная цель в предложенной аппаратуре.
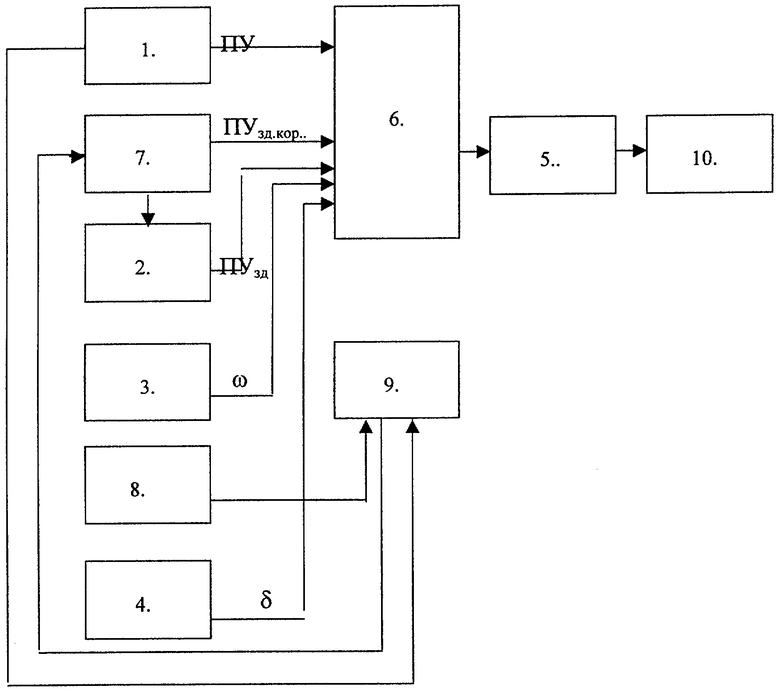
На чертеже представлена блок-схема аппаратуры автоматического расхождения судна со встречным объектом, содержащая приемник СНС 1, задатчик путевого угла ПУзд 2, датчик угловой скорости 3, датчик руля 4, рулевой привод 5, сумматор 6, блок программного управления 7, радар 8, вычислитель 9, объект управления 10 (судно).
В качестве возможного варианта реализации рассмотрим приемник СНС 1 типовой разработки НПО «Агат» или Красноярского завода, задатчик путевого угла 2 и датчик руля 4, преобразователи угла в напряжение с точностью не хуже 2%; датчик угловой скорости 3 типовой с чувствительностью не хуже 0.005 гр/сек; сумматор 6, блок программного управления 7 и вычислитель 9 могут реализовываться на микросхемах 140 уд 8 или на процессорах; рулевой привод 5 и радар 8 - штатное судовое оборудование.
Аппаратура работает следующим образом.
1. Из приемника СНС 1 сигнал текущего путевого угла судна «ПУ» поступает на первый вход сумматора 6. На второй-пятый входы сумматора 6 подключены выходы: задатчика 2 путевого угла «ПУзд», датчика 3 угловой скорости судна «ω», датчика 4 руля «δ» и блок 7 программного управления - корректировки заданного путевого угла «ПУзд+ΔПУзд». На выходе сумматора 6 вырабатывается скорость перекладки руля «d/dtδ», которая поступает на вход рулевого привода 5:

Ki=1,2,3 - постоянные коэффициенты регулирования.
В случае отсутствия встречного объекта ΔПУзд=0 судно будет двигаться с путевым углом, равным заданному значению ПУ=ПУзд.
2. При появлении встречного объекта с выхода радара 8 поступают на первый вход вычислителя 9 азимут встречного объекта «ψ» и расстояние от встречного объекта до судна «L», на второй вход вычислителя с выхода приемника СНС 1: курс судна φ, текущая широта и долгота судна «Фi», «λi» и путевой угол судна ПУсуд. В вычислителе 9 формируется текущая широта и долгота встречного объекта, вектор расстояния от судна до встречного объекта «Lоб.,суд.», путевой угол встречного объекта ПУоб. и скорость хода Vоб.:
а) текущая широта и долгота встречного объекта

где φ - текущий курс судна,
ψ - текущий азимут встречного объекта,
Lоб.,суд. - расстояние от судна до встречного объекта,
Фоб., λоб., (Фсуд., φсуд.) - текущая широта и долгота встречного объекта (и судна),
б) путевой угол встречного объекта:

где ПУоб. - текущий путевой угол встречного объекта,
Фоб.i-1, λоб.i-1 и Фoб.i, λоб.i - текущая широта и долгота встречного объекта в момент времени «t» и в следующий момент времени «t+Δt»,
в) скорость хода встречного объекта:

где Фоб.i-1, λоб.i-1 и Фoб.i, λоб.i - текущая широта и долгота встречного объекта в момент времени t и в следующий момент времени t+Δt,
Vоб. - скорость движения встречного объекта,
d/dt - символ дифференцирования.
3. Используя полученные по зависимостям (2-4) в вычислителе 9 текущую широту, долготу и вектор скорости встречного объекта и из приемника СНС 1 сигналы широты, долготы и скорости хода судна, формируем в вычислителе 9 траектории будущего движения судна и встречного объекта, по которым в ограниченной акватории λсуд.<λI<С определяют широту и долготу точки (Фn λn) пересечения отрезков траекторий будущего движения судна и встречного объекта:
где Фоб., Фсуд., λоб., λсуд. - текущие широты и долготы встречного объекта и судна.
4а) Если условие пересечения траекторий (5) в ограниченной акватории не имеет решения, в вычислителе 9 через интервал времени «Δt» вновь решают зависимости (2)-(4).
4б) Если условие (5) выполняется, в вычислителе 9 определяется условие одновременного будущего нахождения судна и встречного объекта вблизи точки пересечения двух траекторий (Фn, λn):

где tсуд.=Lсуд./Vсуд.,
tоб.=Lоб./Vоб.,
Lсуд. - расстояние между текущим положением судна (Фсуд., λсуд.) и точкой пересечения траекторий (Фn,λn),
Lоб. - расстояние между текущим положением встречного объекта (Фоб., λоб.) и точкой пересечения траекторий (Фn,λn),
Vсуд., Voб. - скорость движения судна и встречного объекта,
tсуд., tоб. - расчетное время движения судна и встречного объекта от текущих широт и долгот судна и встречного объекта (Фсуд., Фоб., λсуд., λоб.) до точки пересечения траекторий (Фn, λn).
5а) Если условие (6) не выполняется, в вычислителе 9 через интервал времени «Δt» вновь решают зависимости (2)-(4) и т.д.
5б) Если условие (6) выполняется, в вычислителе 9 вырабатывается уставка ΔПУзд, которая суммируется с текущим путевым углом судна ПУсуд.=ПУзд (поступившим из приемника СНС 1). Затем в вычислителе 9 вырабатывается условие пересечения корректированной траектории движения судна и траектории движения встречного объекта:

где Фсуд.кор.i-Фсуд.=CtgПУсуд.кор.(λсуд.кор.i-λсуд.),
Фоб.кор.i-Фоб.=CtgПУоб.(λоб.кор.i-λоб.),
ПУсуд.кор.=(ПУзд+ΔПУзд)
6а) Если зависимость (5а) не имеет решения, из вычислителя 9 сигнал
ПУсуд.кор.=ПУсуд.+ΔПУзд
поступает в блок программного управления 7 и далее на пятый вход сумматора 6, при этом блок программного управления 7 отключает задатчик ПУзд 2 от сумматора 6. Судно начинает двигаться по скорректированному направлению ПУсуд.кор..
В вычислителе 9 формируется время Трасхож.:
Трасхож.=Lсуд.расх./Vсуд.
где L2 суд.расх.=(Фкор.n-Фсуд.)2+(λкор.n-λсуд.)2,
Lсуд.расх. - отрезок пути судна от текущей точки нахождения судна (Фсуд., λсуд.) до точки пересечения скорректированной траектории движения судна с траекторией движения встречного объекта (Фкор.n, λкор.n). Блок программного управления 7 через время Трасхож. по сигналу из вычислителя 9 отключается от сумматора 6 и к пятому входу сумматора 7 подключает задатчик ПУзд 2. Аппаратура автоматического расхождения судна со встречным объектом возвращается в начальное исходное состояние.
6б) Если зависимость (5а) имеет решение, в вычислителе 9 определяется выполнение условия одновременного будущего нахождения судна и встречного объекта в точке пересечения двух траекторий (Фn кор., λn кор.):

tсуд.кор., tоб.кор. - расчетное время движения судна и встречного объекта от текущих широт и долгот судна и встречного объекта (Фсуд., Фоб., λсуд., λоб.) до корректированной точки пересечения траекторий (Фn кор., λn кор.).
7а) Если условие (6а) не выполняется в вычислителе 9 через интервал времени «Δt», аппаратура автоматического расхождения судна со встречным объектом возвращается в исходное первоначальное состояние и вновь решаются зависимости (2)-(4) и т.д.
7б) Если условие (6а) выполняется, в вычислителе 9 вырабатывается уставка ΔПУзд1=2ΔПУзд, которая суммируется с текущим путевым углом судна ПУсуд. (поступившим из приемника СНС 1). Затем в вычислителе 9 вырабатывается условие пересечения вновь корректированной траектории движения судна и траектории движения встречного объекта:

8а) Если зависимость (5б) не имеет решения в вычислителе 9, сигнал
ПУсуд.кор.1=ПУсуд.+2ΔПУзд
поступает в блок программного управления 7 и далее на пятый вход сумматора 6. Программный блок 7 отключает задатчик 2 ПУзд от сумматора 7. Судно начинает двигаться по вновь скорректированному направлению ПУсуд.кор.1. В вычислителе 9 формируется время Трасхож.1.
Через время Трасхож.1 аппаратура расхождения судна со встречным объектом переходит в начальное исходное состояние.
8б) Если зависимость (5б) имеет решение в вычислителе 9, тогда определяется выполнение условия:

9а) Если условие (6б) не выполняется, то через интервал времени «Δt» вновь решают зависимости (2)-(4) и т.д.
9б) Если условие (6б) выполняется, в вычислителе 9 вырабатывается уставка ΔПУзд2=3ΔПУзд, которая суммируется с текущим путевым углом судна ПУсуд.. Затем в вычислителе 9 формируется условие:

10а) Если зависимость (5в) в заданной акватории не имеет решения в вычислителе 9, сигнал:
ПУсуд.кор.2=ПУсуд.+2ΔПУзд
поступает в блок программного управления 7 и судно начинает двигаться по вновь скорректированному направлению ПУсуд.кор.1. Через время Трасхож.2 аппаратура расхождения судна переходит в начальное исходное состояние.
10б) Если зависимость (5в) имеет решение, тогда определяется выполнение следующего условия (6в). При невыполнении условия (6в) аппаратура расхождения судна переходит в начальное исходное состояние, при выполнении условия (6в) формируется новое значение ПУсуд.кор.2 и циклы поиска безопасного направления движения судна продолжатся. После определения «n» корректированного направления движения судно выйдет на это направление и продолжит движение по этому направлению в течение «Трасхож.n». Далее аппаратура расхождения судна со встречным объектом вернется в начальное исходное состояние.
Проведенное моделирование подтвердило эффективность использования предложенной аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
| СПОСОБ ВЫБОРА ИСПОЛНИТЕЛЬНЫХ СРЕДСТВ В СИСТЕМЕ РАСХОЖДЕНИЯ СУДНА С ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2383463C1 |
| СПОСОБ РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМИ ОБЪЕКТАМИ | 2008 |
|
RU2364546C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2452655C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2465169C1 |
| СПОСОБ УПРАВЛЕНИЯ СБЛИЖЕНИЕМ КОРАБЛЯ С ПОДВИЖНОЙ ЦЕЛЬЮ | 2011 |
|
RU2467917C1 |
| СИСТЕМА ПРОГНОЗИРОВАНИЯ БЕЗОПАСНОГО РАСХОЖДЕНИЯ СУДОВ | 2020 |
|
RU2752725C1 |
| Система прогнозирования безопасного расхождения судов | 2022 |
|
RU2780081C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
Изобретение относится к области судовождения, а именно к автоматическому управлению движением судна по заданному направлению с выявлением встречных объектов и автоматического расхождения с ними. В предложенной аппаратуре используются приемник спутниковой навигационной системы, вычислитель, радар, рулевой привод, сумматор и блок программного управления. Из последнего сигнал коррекции заданного путевого угла вводится на вход сумматора в случае удовлетворения условия столкновения судна со встречным объектом, которое вырабатывается в вычислителе. Коррекция заданного путевого угла поступает в блок программного управления из вычислителя. Изобретение обеспечивает повышенную эффективность в исключении возможности столкновения судна со встречными объектами. 1 ил.
Аппаратура автоматического расхождения судна со встречным объектом, содержащая приемник спутниковой навигационной системы, вырабатывающий сигналы текущей широты и долготы судна, а также сигнал текущего путевого угла, задатчик путевого угла, датчик угловой скорости судна, датчик угла руля, выходы которых подключены соответственно к четырем входам сумматора, вырабатывающего сигнал скорости перекладки руля и соединенного с рулевым приводом, отличающаяся тем, что дополнительно содержит блок программного управления, вырабатывающий сигнал для корректировки заданного путевого угла при появлении встречного объекта и соединенный выходом с пятым входом сумматора, радар, вырабатывающий сигналы азимута встречного объекта и расстояния от встречного объекта до судна, и вычислитель, подключенный входами к радару и приемнику спутниковой навигационной системы, а выходом - к входу блока программного управления и выполненный с возможностью формирования траекторий будущего движения судна и встречного объекта, а также определения по ним широты и долготы точки пересечения отрезков траекторий будущего движения судна и встречного объекта.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 1991 |
|
RU2006956C1 |
| Приспособление для устранения пропотевания лент на шляпах | 1927 |
|
SU16879A1 |
| Авторулевой | 1973 |
|
SU460535A1 |

