Изобретение относится к области сканирующей зондовой микроскопии. Оно может быть использовано для приведения зонда сканирующего зондового микроскопа в рабочеее положение, особенно в сложных акустических и механических условиях, например, для проведения последующих измерений размеров нанообъектов и рельефа поверхностей, имеющих перепад высот наноразмера.
Известен способ подвода, использующий непрерывную работу двигателя подвода при замкнутой цепи обратной связи и полностью выдвинутом сканере [1]. Двигатели подвода останавливаются, и подвод прекращается в момент, когда сканер, управляемый цепью обратной связи, оказывается втянутым примерно наполовину.
Недостаток этого способа заключается в том, что после приближения острия зонда к образцу продолжается работа двигателей подвода. Кроме того, выбор рабочей точки цепи обратной связи производят эмпирическим образом заранее. Это приводит к увеличению степени разрушительного воздействия на образец и острие зонда, уменьшению точности последующих измерений и ухудшению их воспроизводимости.
Известен также способ подвода зонда к образцу для сканирующего зондового микроскопа (СЗМ), в процессе которого происходит чередование этапов работы двигателя подвода с полностью втянутым сканером и этапов выдвижения сканера с неработающим двигателем до тех пор, пока на одном из этапов выдвижения сканера острие зонда не окажется вблизи образца [2]. Выдвижением сканера управляет цепь обратной связи с заранее выбранной рабочей точкой. Этот способ выбран в качестве прототипа предложенного решения.
Недостаток этого способа заключается в том, что выбор рабочей точки цепи обратной связи производят заранее эмпирическим образом, что приводит к увеличению степени разрушительного воздействия на образец и острие зонда, уменьшению точности последующих измерений и ухудшению их воспроизводимости.
Технический результат предлагаемого изобретения заключается в уменьшении степени разрушительного воздействия на образец и острие зонда, уменьшении погрешности последующих измерений и улучшении их воспроизводимости.
Указанный технический результат достигается тем, что в способе подвода зонда к образцу для сканирующего зондового микроскопа, в процессе которого происходит чередование этапов работы двигателя подвода с полностью втянутым сканером и этапов выдвижения сканера с неработающим двигателем до тех пор, пока на одном из этапов выдвижения сканера острие зонда не окажется вблизи образца, на этапах выдвижения сканера сканером управляет цепь обратной связи, рабочая точка цепи обратной связи на каждом этапе выдвижения сканера постепенно изменяется, начиная с величины входного сигнала цепи обратной связи в момент начала этого этапа, таким образом, чтобы обратная связь, выдвигая сканер, начиная с полностью втянутого состояния, отрабатывала эти изменения до тех пор, пока сканер не окажется полностью выдвинутым или острие зонда не окажется вблизи образца.
Существует также вариант, в котором близость острия зонда к образцу определяется по резкому уменьшению скорости выдвижения сканера.
Существует также вариант, в котором в качестве зонда используют силовой зондовый датчик с оптической системой регистрации, на протяжении процесса подвода происходит возбуждение колебаний консоли зондового датчика, и близость острия зонда к образцу определяется по резкому скачку сигнала фазы колебаний.
Существует также вариант, в котором первый этап работы двигателей подвода не прекращается до тех пор, пока входной сигнал цепи обратной связи не изменится на заданную заранее величину вследствие взаимодействия острия зонда с образцом.
Существует также вариант, в котором скорость изменения рабочей точки цепи обратной связи на этапах выдвижения сканера регулируется таким образом, чтобы скорость выдвижения сканера была максимальной, и сигнал ошибки рассогласования не превышал заданной величины.
Существует также вариант, в котором после того, как острие зонда оказывается вблизи образца, продолжает подстраиваться рабочая точка цепи обратной связи.
Существует также вариант, в котором по скорости выдвижения сканера в последний момент перед прекращением подвода происходит автоматическое определение угла наклона кривой входной сигнал обратной связи от расстояния острие зонда - образец.
Существует также вариант, в котором после того, как острие зонда оказывается вблизи образца, продолжает подстраиваться рабочая точка цепи обратной связи, и во время подстраивания рабочей точки цепи обратной связи достаточная близость острия зонда к образцу определяется по резкому уменьшению скорости выдвижения сканера.
Существует так же вариант, в котором после того, как острие зонда оказывается вблизи образца, продолжает подстраиваться рабочая точка цепи обратной связи, и в качестве зонда используют силовой зондовый датчик с оптической системой регистрации, происходит возбуждение колебаний консоли силового зондового датчика, а во время подстраивания рабочей точки цепи обратной связи достаточная близость острия зонда к образцу определяется по резкому скачку сигнала фазы колебаний.
Существует так же вариант, в котором по скорости выдвижения сканера в последний момент перед прекращением подвода происходит автоматическое определение угла наклона кривой входной сигнал обратной связи от расстояния острие зонда - образец и по углу наклона кривой входной сигнал обратной связи от расстояния острие зонда - образец происходит автоматическая калибровка входного сигнала цепи обратной связи.
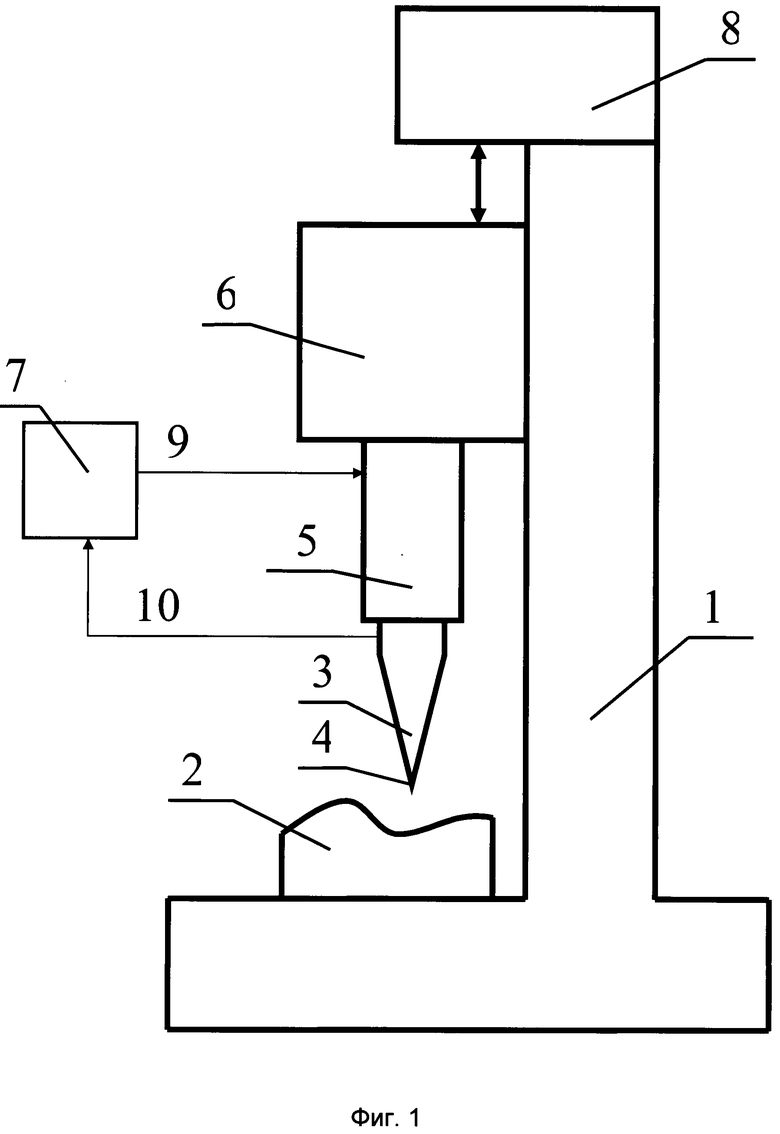
На фиг.1 изображен в общем виде сканирующий зондовый микроскоп.
На фиг.2 изображено в общем виде устройство для реализации предлагаемого способа подвода зонда к образцу для сканирующего зондового микроскопа.
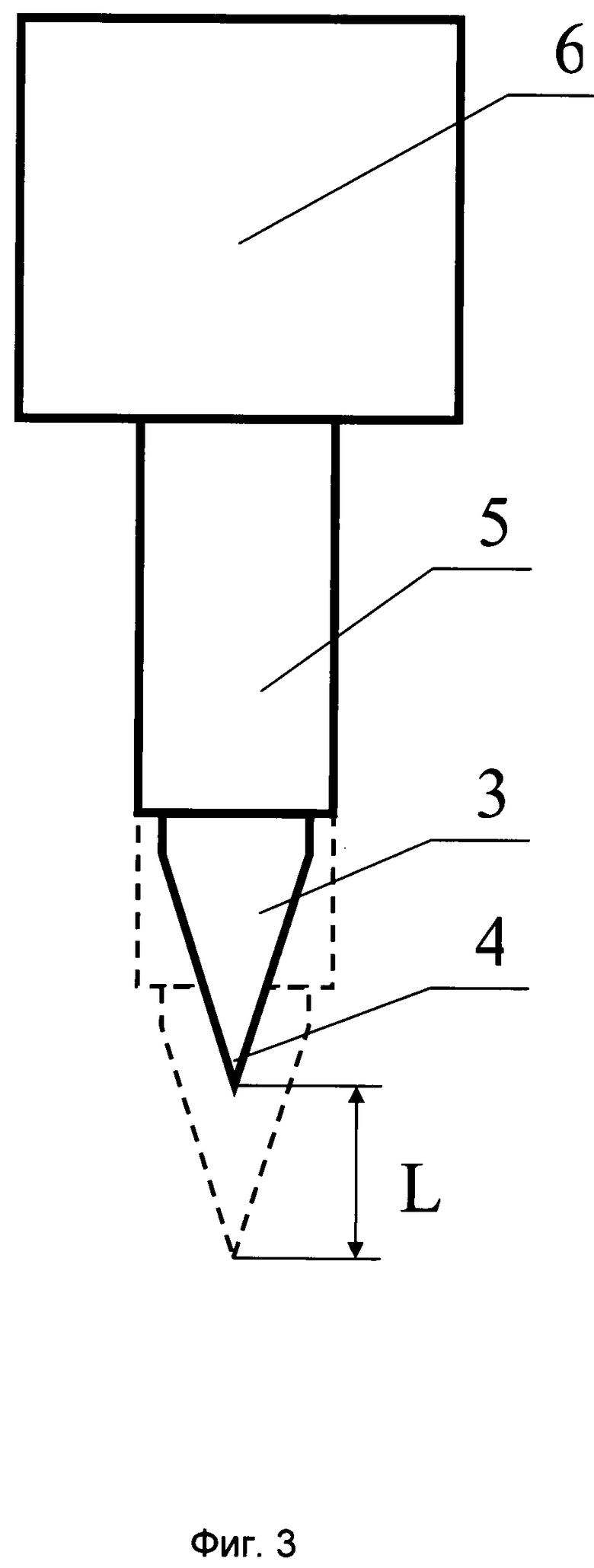
На Фиг.3 показан процесс перемещения зонда сканером.
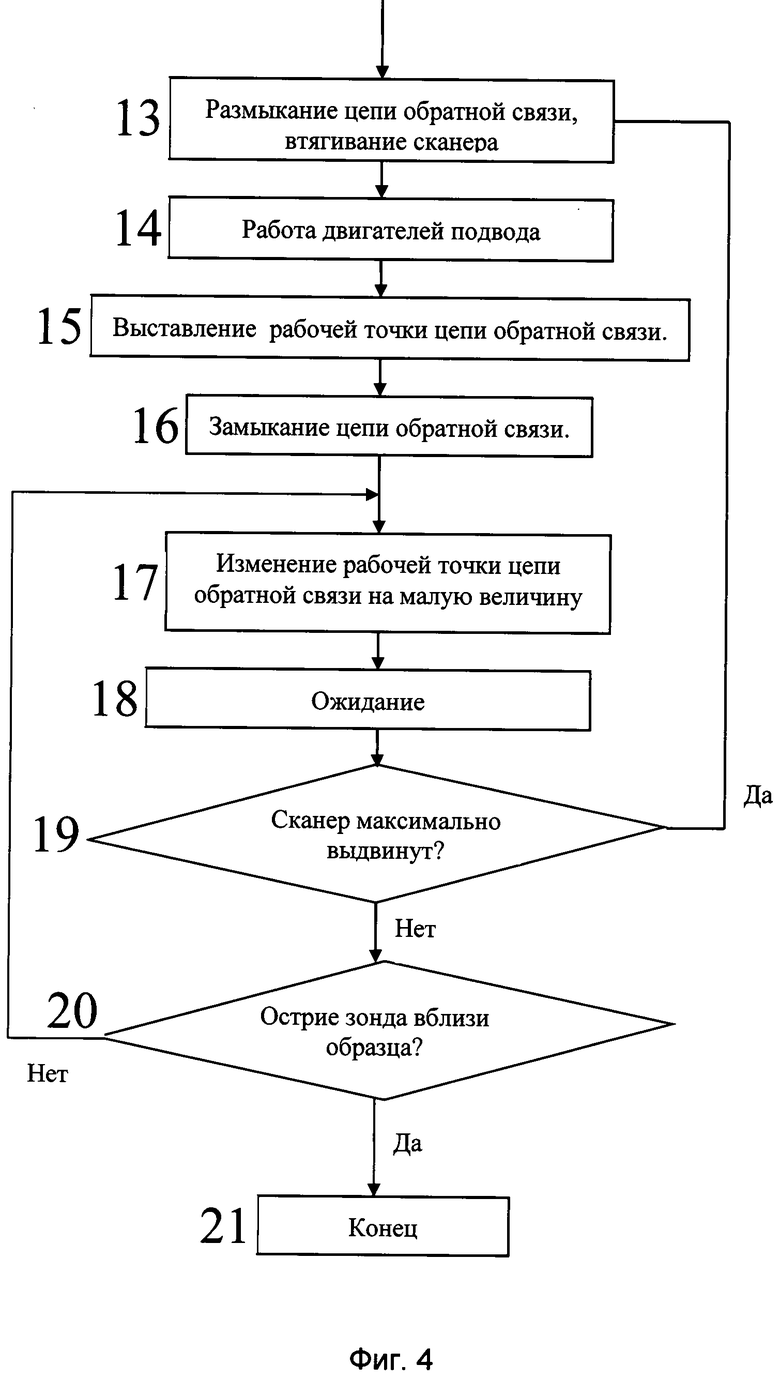
На Фиг.4 изображена схема алгоритма подвода сканирующего зондового микроскопа по предлагаемому способу.
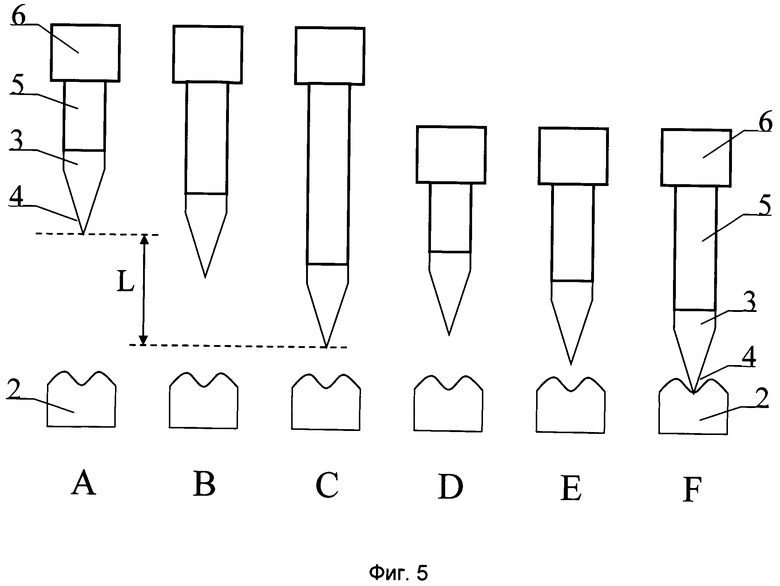
На Фиг.5 изображены положения измерительной головки, сканера и зонда на разных этапах выполнения подвода предлагаемым способом.
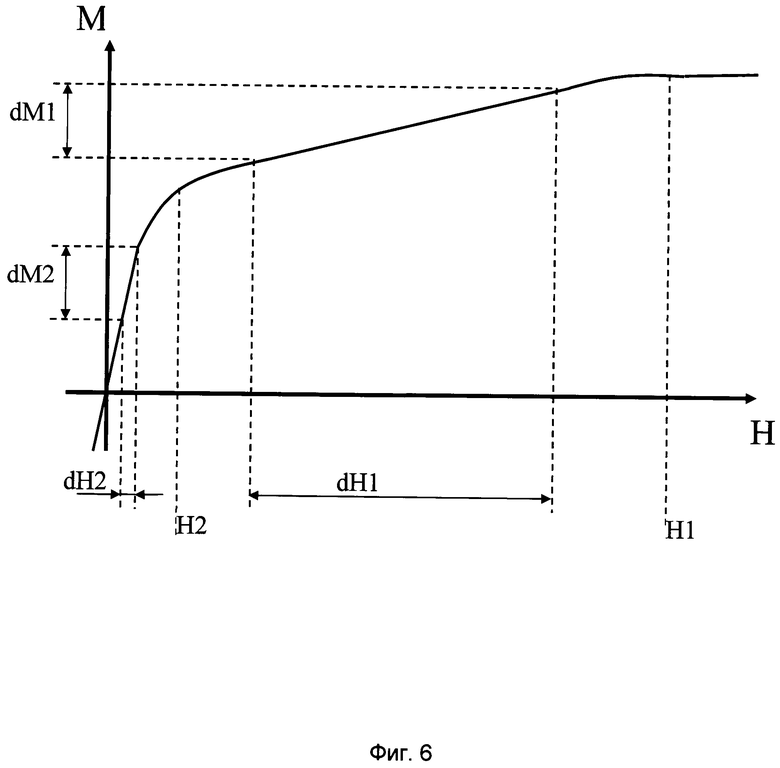
На Фиг.6 изображен пример кривой зависимости входной сигнал цепи обратной связи от расстояния острие зонда - образец.
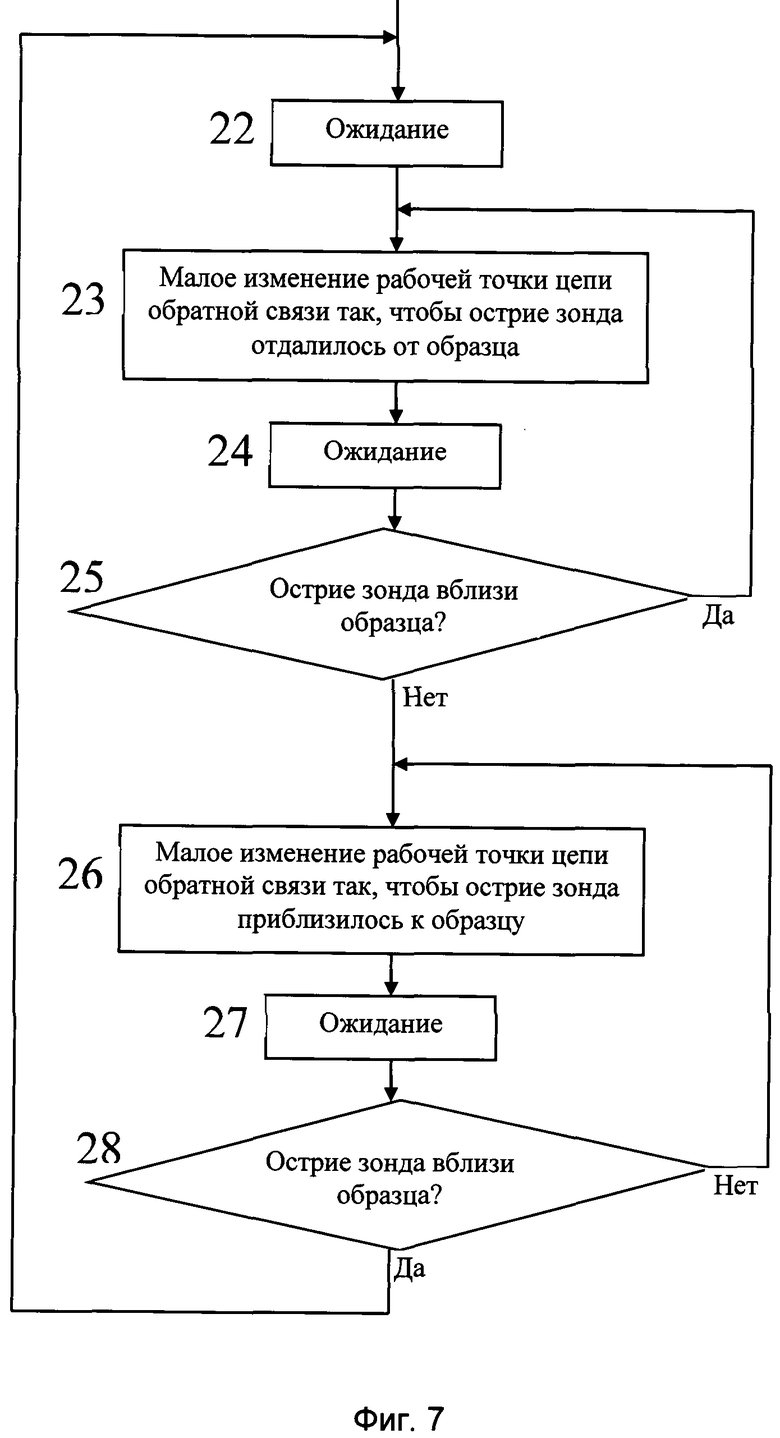
На Фиг.7 изображена схема работы алгоритма подстройки рабочей точки цепи обратной связи после выполнения предварительного подвода.
Сканирующий зондовый микроскоп включает в себя неподвижную платформу 1 с находящимся на ней образцом 2 (см. Фиг.1), зонд 3, острие зонда 4, сканер 5, измерительную головку 6, цепь обратной связи 7, двигатель подвода 8. Цепь обратной связи 7 формирует управляющий выдвижениями сканера 5 управляющий сигнал 9, На вход цепи обратной связи 7 поступает входной сигнал 10, формируемый зондом 3. Подробнее устройство СЗМ и его узлов можно узнать в [3, 4]. Чаще всего зонд 3 представляет собой либо токовый зонд с измерителем тока, либо силовой зондовый датчик с оптической системой регистрации. Токовой зонд обычно выполнен в виде токопроводящей проволоки. Силовой зондовый датчик обычно выполнен в виде чипа и гибкой консоли с закрепленным на конце острийным зондом, находящимся в непосредственном контакте с образцом 2 во время измерений, а оптическая система регистрации позволяет следить за изгибами консоли зондового датчика. (На схеме возможные устройства зонда 3 не показаны, подробнее их выполнение см. [5, 6]).
Устройство для реализации предлагаемого способа включает в себя также блок 11 управления подводом (см. Фиг.2), который управляет работой двигателей подвода 8 и устанавлявает рабочую точку 12 цепи обратной связи 7.
Сканер 5, изменяя свою длину, позволяет перемещать зонд 3 в диапазоне L допустимых длин сканера 5 (см. Фиг.3).
Алгоритм подвода сканирующего зондового микроскопа по предлагаемому способу удобно изображать в виде схемы Фиг.4. В прямоугольниках 13-18, 21 кратко описаны последовательно выполняемые действия алгоритма, в ромбах 19, 20 описаны условия ветвления алгоритма.
На Фиг.5 изображены положения измерительной головки 6, сканера 5 и зонда 3 на разных этапах выполнения подвода предлагаемым способом. Во время выполнения подвода предлагаемым способом этапы выдвижения сканера и перемещения измерительной головки происходят поочередно.
Зависимость входного сигнала 10 (Фиг.2) цепи обратной связи 7 от расстояния острие зонда 4 - образец 2 на большом расстоянии от образца Н>Н1 (см. Фиг.6) имеет вид горизонтальной зависимости. Для полуконтактного метода работы микроскопа входным сигналом 10 цепи обратной связи 7 чаще всего служит амплитуда М. Для сигнала амплитуды М, как и для многих других сигналов, использующихся в качестве входного сигнала 10 цепи обратной связи 7, зависимость от высоты при приближении к образцу становиться круче - dH2/dM2<dH1/dM1 (Фиг.6).
Алгоритм подстройки рабочей точки 12 цепи обратной связи 7 для подвода, где после того, как острие зонда оказывается вблизи образца, рабочая точка продолжает подстраиваться, реализован в виде непрерывного цикла действий 22-24, 26, 27 и условий 25, 28 (Фиг.7).
Способ подвода зонда к поверхности реализуется следующим образом. Образец 2 устанавливают на неподвижную платформу 1 (Фиг.2). Цепь обратной связи 7 размыкается, и сканер 5 полностью втягивается 13 (Фиг.4). После этого происходит работа 14 двигателей подвода 8, перемещающих измерительную головку 6 по направлению к образцу 2. Перемещение измерительной головки 6 происходит на расстояние, не превосходящее длину сканера 5, для того, чтобы заведомо не привести острие зонда 4 в касание с образцом и не повредить образец 2 и острие зонда 4. После этого выставляется 15 рабочая точка 12 цепи обратной связи 7, равная входному сигналу 10 цепи обратной связи 7 в данный момент. Таким образом, сигнал ошибки рассогласования оказывается равным нулю. После этого цепь обратной связи 7 замыкается 16 и начинается выполнение этапа выдвижения 17-20 сканера. Положение измерительной головки 6 и сканера 5 в этот момент изображено на Фиг.5А. После замыкания 16 обратной связи 7 происходит последовательные изменения 17 рабочей точки 12 цепи обратной связи 7 на малую величину, и ожидания 18, чтобы обратная связь 7 успела отработать изменение 17, до тех пор, пока сканер 5 не окажется выдвинут 19 на максимальную величину L. Положение сканера 4 в середине цикла его выдвижения 17-20 изображено на Фиг.5В. Выход из цикла 17-20 на Фиг.5А-5С происходит по условию 19 - сканер оказывается при каком-то значении рабочей точки 12 цепи обратной связи 7, полностью выдвинутым (Фиг.5С). После очередного выполнения подготовки 13 к работе двигателя, работы двигателя 14 и подготовки 15, 16 к очередному циклу 17-20 выдвижения сканера 5, измерительная головка 6 и сканер 5 оказываются в положении, изображенном на Фиг.5D. На Фиг.5 выполнение цикла 17-20 из-за близости образца 2 завершается по наступлению условия 20 близости острия зонда к образцу. Весь алгоритм подвода завершается 21, положение измерительной головки 6 и сканера 5 обеспечивают касание острием зонда 4 образца 2 Фиг.5F. На рассмотренном конкретном процессе 13-21 (Фиг.4) повода (Фиг.5) произошло два этапа выдвижения сканера 5 и 5А-С и 5D-F, закончившихся полным выдвижением L сканера 5 и касанием острием зонда 4 образца 2 соответственно. Количество выполняемых при подводе этапов выдвижения сканера 5 зависит от первоначального положения измерительной головки 6, образца 2 и диапазона длин сканера L (Фиг.5А). Последний, завершающий подвод этап выдвижения сканера 5 всегда окачивается касанием, Фиг.5F, острием зонда 4 образца 2. Все остальные этапы выдвижения, Фиг.5А-5С, сканера 5, если они присутствуют, всегда заканчиваются полностью выдвинутым положением 5С сканера 5.
В варианте, где близость острия зонда 4 к образцу 2 определяется по резкому уменьшению скорости выдвижения сканера 5, каждый раз в условии 20 (Фиг.5) измеряется длина сканера 5. Каждый раз, пока для цикла 17-20 не сработают условия выхода 19 или 20, длина сканера 5 будет увеличиваться. Когда острие зонда 4 окажется вблизи образца 2, скорость изменения длины сканера 5 резко упадет. Кривая входной сигнал 10 цепи обратной связи 7 от высоты (например, для случая, когда в роли входного сигнала 10 цепи обратной связи 7 выступает сигнал амплитуды М вынужденных колебаний консоли зондового датчика) (Фиг.6), поясняет сказанное. На то же самое изменение рабочей точки 12 цепи обратной связи 7 dM2=dM1 вблизи образца 2 будет происходить гораздо меньшее приближение острия зонда 4 к образцу 2 dH2<dH1 (а значит, и меньшее удлинение сканера 5, вследствие работы цепи обратной связи 7), чем вдали от него. Таким образом, при уменьшении удлинения dH2 ниже какого-то выбранного порогового значения в условии 20 определяется близость острия зонда 4 к образцу 2 и завершается цикл 17-20 выдвижения сканера, подвод заканчивается 21.
В варианте, в котором в качестве зонда 3 используют силовой зондовый датчик с оптической системой регистрации, на протяжении процесса подвода происходит возбуждение колебаний консоли силового зондового датчика, и близость острия зонда 4 к образцу 2 определяется по резкому скачку сигнала фазы колебаний, условие 20 работает следующим образом. При приближении острия зонда 4 к образцу 2 сигнал фазы претерпевает скачок (примерно Н=Н2, см. Фиг.6). Таким образом, условие 20 срабатывает, когда сигнал фазы с предыдущего выполнения цикла 17-20 изменяется больше какого-то порогового значения, подвод заканчивается 21.
В способе, отличающимся тем, что первый этап работы двигателей подвода 8 не прекращается до тех пор, пока входной сигнал 10 цепи обратной связи 7 не изменится на заданную заранее величину вследствие взаимодействия острия зонда 4 с образцом 2, работа 14 двигателей подвода 8, при первом выполнении, прекращается только тогда, когда входной сигнал 10 цепи обратной связи 7 начинает заметно изменяться по мере приближения к образцу (Н<Н1 Фиг.6).
В способе, где скорость изменения рабочей точки 12 цепи обратной связи 7 на этапах выдвижения сканера 5 регулируется таким образом, чтобы скорость выдвижения сканера 5 была максимальной и сигнал ошибки рассогласования не превышал заданной величины, ожидание 18 (Фиг.5) происходит следующим образом. В течение ожидания 18, после изменения рабочей точки 12 цепи обратной связи 7, с высокой частотой измеряется сигнал ошибки рассогласования. В момент уменьшения ошибки рассогласования ниже какого-то порогового значения ожидание 18 завершается.
В способе, где после того, как острие зонда 4 оказывается вблизи образца 2, продолжает подстраиваться рабочая точка 12 цепи обратной связи 7, процесс подвода действием 21 (Фиг.4) полностью не заканчивается. Действие 21 заканчивает только предварительный подвод зонда 4 к образцу 2. В течение всего последующего периода измерений, с некоторым временным интервалом, происходят этапы дополнительного подвода, которые корректируют рабочую точку 12 цепи обратной связи 7 таким образом, чтобы острие зонда 4 оставалось вблизи образца 2. В противном случае из-за меняющихся условий эксперимента (например, состояние поверхности образца 2, острия зонда 4, влажности воздуха) острие зонда 4 в какой-то момент измерений может оказаться в недостаточной близости к образцу 2. Поэтому возникает необходимость циклического выполнения действий 22-28 (Фиг.7). Время ожидания 22 выбирается таким образом, чтобы за это время в силу меняющихся условий эксперимента острие зонда 4 еще оставалось в допустимых диапазонах расстояний до образца 2. Каждый раз после ожидания 22 рабочая точка 12 цепи обратной связи 7 начинает постепенно изменяться в цикле 23-25 до тех пор, пока острие зонда 4 не отдалится 25 от образца 2. Время ожидания 24 выбирается таким образом, чтобы цепь обратной связи 7 успела отработать изменения 23 рабочей точки 10 цепи обратной связи 7. После этого происходит обратный процесс приближения острия зонда 4 к образцу 2 в цикле 26-28 (Фиг.7), до тех пор, пока острие зонда 4 не окажется 28 вблизи образца 2. После этого весь цикл 22-28 повторяется. При нормальной работе прибора и относительно стабильных условиях эксперимента время ожидания 22 составляет большую часть времени выполнения полного цикла 22-28 и на протяжении этого времени расстояние острие зонда 4 - образец 2 можно считать оптимальным.
В способе, где по скорости выдвижения сканера 5 в последний момент перед прекращением подвода происходит автоматическое определение угла наклона кривой входной сигнал 10 обратной связи 7 от расстояния острие зонда 4 - образец 2, в конце 21 подвода происходит следующее. Вычисляется угол наклона кривой вблизи образца artg(dM2/dH2) (Фиг.6), где dM2 - последнее изменение 17 рабочей точки 12 и dH2 - длина последнего выдвижения сканера 5 за время ожидания 18 перед завершением подвода 21.
В способе, где после того, как острие зонда 4 оказывается вблизи образца 2, продолжает подстраиваться рабочая точка 12 цепи обратной связи 7, и во время подстраивания рабочей точки 12 цепи обратной связи 7 достаточная близость острия зонда 4 к образцу 2 определяется по резкому уменьшению скорости выдвижения сканера 5, условия 21 и 24 срабатывают следующим образом. Острие зонда 4 считается вблизи образца 2 в случае, если отношение dM2/dH2 (Фиг.6) оказывается больше какого-то порогового значения, в противном случае острие зонда 4 считается находящимся вдали от образца 2.
В способе, где после того, как острие зонда 4 оказывается вблизи образца 2, продолжает подстраиваться рабочая точка 12 цепи обратной связи 7, и в качестве зонда 3 используют силовой зондовый датчик с оптической системой регистрации, происходит возбуждение колебаний консоли силового зондового датчика, а во время подстраивания рабочей точки 12 цепи обратной связи 7 достаточная близость острия зонда 4 к образцу 2 определяется по резкому скачку сигнала фазы колебаний, условия 25 и 28 (Фиг.7) срабатывают следующим образом. При приближении острия зонда 4 к образцу 2 сигнал фазы претерпевает скачок (примерно Н=Н2, см. Фиг.6). Таким образом, условия 25 и 28 срабатывают, когда сигнал фазы с предыдущего выполнения цикла (23-25 для условия 25, 26-28 для условия 28, Фиг.7) изменяется больше какого-то порогового значения.
В способе, где по скорости выдвижения сканера 5 в последний момент перед прекращением подвода происходит автоматическое определение угла наклона кривой входной сигнал 10 обратной связи 7 от расстояния острие зонда 4 - образец 2 и по углу наклона кривой входной сигнал 10 обратной связи 7 от расстояния острие зонда 4 - образец 2 происходит автоматическая калибровка входного сигнала 10 цепи обратной связи 7, действие 21 выполняется следующим образом. Вычисляется тангенс угола наклона кривой вблизи образца dM2/dH2 (Фиг.6), где dM2 - последнее изменение 17 рабочей точки и dH2 - величина последнего выдвижения сканера за время ожидания 18 перед завершением подвода 21. После этого, пользуясь приближением, в котором участок кривой вблизи образца 2 Н<Н2 (Фиг.6) считается линейным, происходит калибровка входного сигнала 10 цепи обратной связи 7. В итоге становится возможным измерять величину входного сигнала 10 цепи обратной связи 7 и сигнал ошибки рассогласования в единицах измерения длины.
ТЕХНИЧЕСКИЕ ЭФФЕКТЫ
Управление сканером на этапах выдвижения сканера цепью обратной связи и постепенное изменение рабочей точки цепи обратной связи на каждом этапе выдвижения сканера, начиная с величины входного сигнала цепи обратной связи в момент начала этого этапа, таким образом, чтобы обратная связь, выдвигая сканер, начиная с полностью втянутого состояния, отрабатывала эти изменения до тех пор, пока сканер не окажется полностью выдвинутым или острие зонда не окажется вблизи образца, позволяют подвести острие зонда к поверхности образца при оптимальном значении рабочей точки цепи обратной связи. Это позволяет уменьшить степень разрушительного воздействия на образец и зонд, уменьшить погрешность последующих измерений, улучшить их воспроизводимость.
Определение близости острия зонда к поверхности по резкому уменьшению скорости выдвижения сканера позволяют подвести острие зонда к поверхности образца при оптимальном значении рабочей точки цепи обратной связи. Это позволяет уменьшить степень разрушительного воздействия на образец и острие зонда, уменьшить погрешности последующих измерений, улучшить их воспроизводимость.
Использование силового зондового датчика с оптической системой регистрации и определение близости острия зонда к образцу по резкому скачку сигнала фазы колебаний позволяют подвести острие зонда к образцу при оптимальном значении рабочей точки цепи обратной связи. Это позволяет уменьшить степень разрушительного воздействия на поверхность и острие зонда, уменьшить погрешность последующих измерений, улучшить их воспроизводимость.
Прекращение первого этапа работы двигателей подвода только когда входной сигнал цепи обратной связи изменится на заданную заранее величину, вследствие взаимодействия острия зонда с образцом, позволяет сэкономить время на первоначальном этапе подвода, пока острие зонда еще находится на существенном удалении от образца. При выполнении подвода за фиксированное время такая экономия позволяет меньшими шагами менять рабочую точку цепи обратной связи на этапах выдвижения сканера. Таким образом, рабочая точка цепи обратной связи подбирается точнее. Это позволяет уменьшить степень разрушительного воздействия на поверхность и острие зонда, уменьшить погрешность последующих измерений, улучшить их воспроизводимость.
Регулирование скорости изменения рабочей точки цепи обратной связи на этапах выдвижения сканера таким образом, чтобы скорость выдвижения сканера была максимальной, и сигнал ошибки рассогласования не превышал заданной величины, при выполнении подвода за фиксированное время, позволяет меньшими шагами менять рабочую точку цепи обратной связи. Таким образом, рабочая точка цепи обратной связи подбирается точнее. Это позволяет уменьшить степень разрушительного воздействия на поверхность и острие зонда, уменьшить погрешность последующих измерений, улучшить их воспроизводимость.
Подстраивание рабочей точки цепи обратной связи посредством варьирования ее в некотором диапазоне после того, как острие зонда оказывается вблизи поверхности, позволяет сохранять острие зонда вблизи поверхности в течение всего периода измерений. Это позволяет уменьшить степень разрушительного воздействия на поверхность и зонд, уменьшить погрешности измерений, улучшить воспроизводимость измерений.
Автоматическое определение угла наклона кривой входной сигнал обратной связи от расстояния острие зонда - образец по скорости выдвижения сканера в последний момент перед прекращением подвода позволяет при последующих измерениях по отклонениям от нулевого значения сигнала ошибки рассогласования определять колебания расстояния зонд - образец. Это позволяет уменьшить степень разрушительного воздействия на поверхность и зонд, уменьшить погрешности измерений, улучшить воспроизводимость измерений.
Определение достаточной близости острия зонда к поверхности по резкому уменьшению скорости изменения длины сканера, в процессе подстраивания рабочей точки цепи обратной связи посредством варьирования ее в некотором диапазоне после того, как острие зонда оказывается вблизи поверхности, позволяет поддерживать оптимальным значение рабочей точки цепи обратной связи на протяжении всего периода измерений. Это позволяет уменьшить степень разрушительного воздействия на поверхность и зонд, уменьшить погрешности измерений, улучшить воспроизводимость измерений.
Определение достаточной близости острия зонда к поверхности по резкому скачку сигнала фазы колебаний, когда в качестве зондового датчика используют силовой зондовый датчик и происходит возбуждение колебаний консоли зондового датчика, позволяет поддерживать оптимальным значение рабочей точки цепи обратной связи на протяжении всего периода измерений. Это позволяет уменьшить степень разрушительного воздействия на поверхность и зонд, уменьшить погрешности измерений, улучшить воспроизводимость измерений.
Автоматическая калибровка входного сигнала цепи обратной связи по углу наклона кривой входной сигнал обратной связи от расстояния острие зонда - образец, определенному по скорости выдвижения сканера в последний момент перед прекращением подвода, позволяет, например, в случае измерений, когда роль зонда выполняет силовой зондовый датчик и происходит возбуждение колебаний консоли зондового датчика, определять реальную амплитуду и амплитуду свободных колебаний острия зонда. Это позволяет уменьшить степень разрушительного воздействия на поверхность и зонд, уменьшить погрешности измерений, улучшить воспроизводимость измерений.
ЛИТЕРАТУРА
1. Быков В.А. и др. Сканирующая зондовая микроскопия для науки и промышленности. // "Электроника: наука, технология, бизнес", №5.
2. Mininni; Paul I, Osborne; Jason R., Young; James M., Meyer; Charles R. Method and apparatus for rapid automatic engagement of a probe // US Pat 7665349 February 23, 2010.
3. Быков В.А. и др. "Сканирующий зондовый микроскоп" // Патент RU 2159454 С от 20.11.2000.
4. Быков В.А. "Сканирующий зондовый микроскоп" // Патент RU 2152063 С от 27.06.2000.
5. Abramovitch D., Andersson S., Pao L, Schitter G. "A tutorial on the Mechanisms, Dynamics, and Control of Atomic Force Microscopes" // Proceedings American Control Conference, New York, July 2007, pp.3488-3502.
6. Соколов Д.Ю. "Зонд на основе кварцевого резонатора для сканирующего зондового микроскопа" // Патент RU 2297054 С от 10.04.2007.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2011 |
|
RU2461839C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДЛЯ ДИНАМИЧЕСКОГО ЗОНДА | 2009 |
|
RU2518859C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ЗОНДА | 2009 |
|
RU2512674C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП И СПОСОБ ВЫЯВЛЕНИЯ БЛИЗОСТИ ЕГО ЗОНДОВ | 2010 |
|
RU2526295C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2003 |
|
RU2334214C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2009 |
|
RU2494406C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ В СКАНИРУЮЩЕЙ ЗОНДОВОЙ МИКРОСКОПИИ | 2017 |
|
RU2698953C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С НАНОТОМОМ | 2010 |
|
RU2427846C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ОПТИЧЕСКОЙ СПЕКТРОМЕТРИИ | 2015 |
|
RU2616854C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ПОЛУКОНТАКТНОГО РЕЖИМА С ФИКСИРОВАННЫМ ПИКОМ СИЛЫ ДЛЯ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ ОБРАЗЦА | 2011 |
|
RU2571446C2 |
Изобретение относится к области сканирующей зондовой микроскопии. Способ подвода зонда к образцу для сканирующего зондового микроскопа, предполагающий выполнение этапов, в процессе которых происходит чередование режима работы двигателя подвода с полностью втянутым сканером и режима выдвижения сканера с неработающим двигателем подвода до тех пор, пока на одном из этапов выдвижения сканера острие зонда не окажется вблизи образца. При этом на этапах выдвижения сканера сканером управляет цепь обратной связи, рабочая точка цепи обратной связи на каждом этапе выдвижения сканера постепенно изменяется, начиная с величины входного сигнала цепи обратной связи в момент начала этого этапа, таким образом, чтобы обратная связь, выдвигая сканер, начиная с полностью втянутого состояния, отрабатывала эти изменения до тех пор, пока сканер не окажется полностью выдвинутым или острие зонда не окажется вблизи образца. При этом в качестве зонда используют силовой зондовый датчик с оптической системой регистрации, на протяжении процесса подвода происходит возбуждение колебаний консоли силового зондового датчика, и близость острия зонда к образцу определяется по резкому скачку сигнала фазы колебаний. Технический результат - уменьшение степени разрушительного воздействия на исследуемый образец, повышение точности измерений. 9 з.п. ф-лы, 7 ил.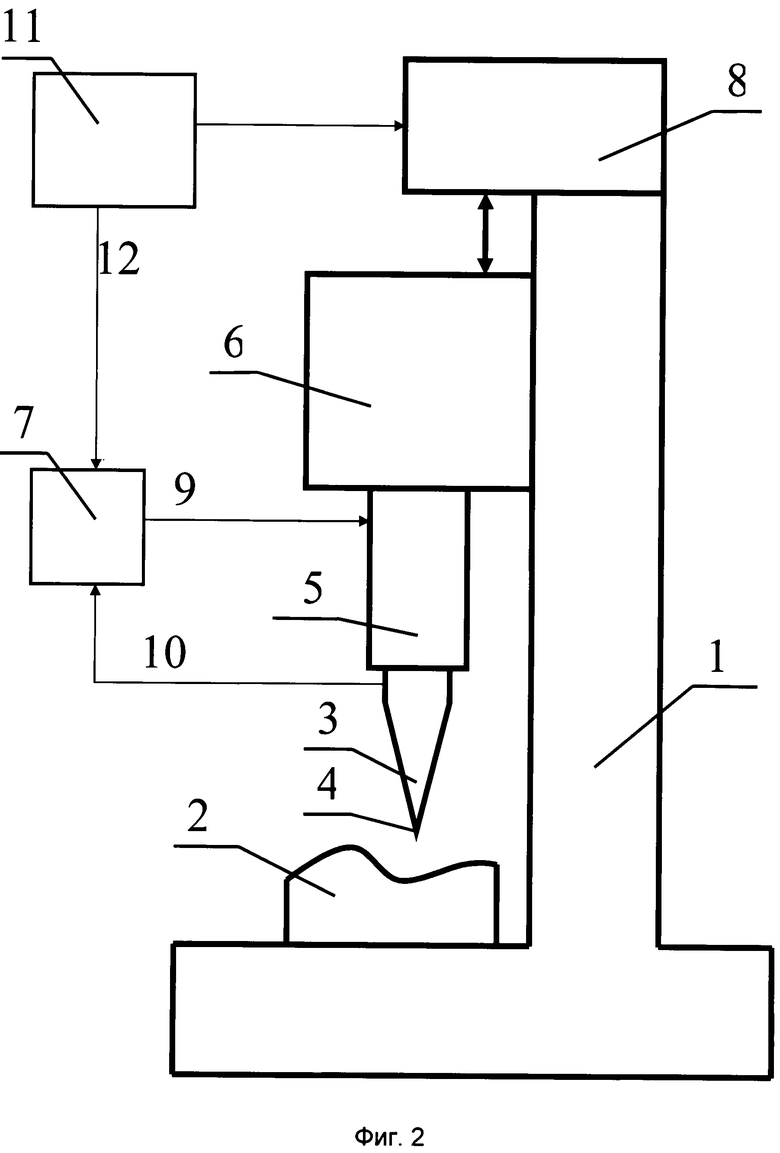
1. Способ подвода зонда к образцу для сканирующего зондового микроскопа, в процессе которого происходит чередование этапов работы двигателя подвода с полностью втянутым сканером и этапов выдвижения сканера с неработающим двигателем подвода до тех пор, пока на одном из этапов выдвижения сканера острие зонда не окажется вблизи образца, отличающийся тем, что на этапах выдвижения сканера сканером управляет цепь обратной связи, рабочая точка цепи обратной связи на каждом этапе выдвижения сканера постепенно изменяется, начиная с величины входного сигнала цепи обратной связи в момент начала этого этапа, таким образом, чтобы обратная связь, выдвигая сканер, начиная с полностью втянутого состояния, отрабатывала эти изменения до тех пор, пока сканер не окажется полностью выдвинутым или острие зонда не окажется вблизи образца.
2. Способ по п.1, отличающийся тем, что близость острия зонда к образцу определяется по резкому уменьшению скорости выдвижения сканера.
3. Способ по п.1, отличающийся тем, что в качестве зонда используют силовой зондовый датчик с оптической системой регистрации, на протяжении процесса подвода происходит возбуждение колебаний консоли силового зондового датчика, и близость острия зонда к образцу определяется по резкому скачку сигнала фазы колебаний.
4. Способ по п.1, отличающийся тем, что первый этап работы двигателей подвода не прекращается до тех пор, пока входной сигнал цепи обратной связи не изменится на заданную заранее величину, вследствие взаимодействия острия зонда с образцом.
5. Способ по п.1, отличающийся тем, что скорость изменения рабочей точки цепи обратной связи на этапах выдвижения сканера регулируется таким образом, чтобы скорость выдвижения сканера была максимальной, и сигнал ошибки рассогласования не превышал заданной величины.
6. Способ по п.1, отличающийся тем, что после того, как острие зонда оказывается вблизи образца, продолжает подстраиваться рабочая точка цепи обратной связи.
7. Способ по п.1, отличающийся тем, что по скорости выдвижения сканера в последний момент перед прекращением подвода происходит автоматическое определение угла наклона кривой входной сигнал обратной связи от расстояния острие зонда - образец.
8. Способ по п.6, отличающийся тем, что во время подстраивания рабочей точки цепи обратной связи достаточная близость острия зонда к образцу определяется по резкому уменьшению скорости выдвижения сканера.
9. Способ по п.6, отличающийся тем, что в качестве зонда используют силовой зондовый датчик с оптической системой регистрации, происходит возбуждение колебаний консоли силового зондового датчика, а во время подстраивания рабочей точки цепи обратной связи достаточная близость острия зонда к образцу определяется по резкому скачку сигнала фазы колебаний.
10. Способ по п.7, отличающийся тем, что по углу наклона кривой входной сигнал обратной связи от расстояния острие зонда - образец происходит автоматическая калибровка входного сигнала цепи обратной связи.
| US 7665349 В2, 23.02.2010 | |||
| В.Л | |||
| Миронов | |||
| Основы сканирующей зондовой микроскопии | |||
| - Российская академия наук | |||
| Институт физики микроструктур, 2004, с.8-9, фиг.1 | |||
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2003 |
|
RU2334214C2 |
| US 20110016592 A1, 20.01.2011 | |||
| US 7098678 B2, 29.08.2006 | |||
| US 6845655 B2, 25.01.2005 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ОБЛИЦОВКИ КУМУЛЯТИВНОГО ЗАРЯДА | 2003 |
|
RU2262001C2 |
| CN 1912573 A, 14.02.2007 | |||
| I.M | |||
| Malovichko | |||
| Phase | |||

