Изобретение относится к авиационной технике, а именно к технике летающих роботов и технике авиамоделизма.
Известен роторный крылолет (1), представляющий собой летательный аппарат с несколькими роторными крыльями. Недостатками известного аппарата являются сложность самого роторного крыла и его системы управления.
Наиболее близким по технической сущности к заявляемому летательному аппарату является выбранный в качестве прототипа воздушный аппарат с вращающимися крыльями (2), содержащий две пары вращающихся крыльев относительно горизонтальной оси, передаточную шестерню, причем крепление крыльев имеет соответствующие зубцы и выступы, а к корпусу аппарата крепятся устройства поворота крыльев.
Воздушный аппарат осуществляет полет за счет подъемной силы, создаваемой вращающимися крыльями, а маневрирует посредством изменения наклона вращающегося крыла в необходимый момент и на заданный угол.
Недостатком известного аппарата является механическое управление поворотом крыла посредством высокого и низкого ограничителей, что является сложным и создающим вибрации. Принципиально сложно управление с заданной точностью и в необходимый момент таким механизмом, что сказывается на его маневренности и возможности осуществления любой траектории полета. Полностью механическая система аппарата не может обеспечить высокую надежность.
Технической задачей настоящего изобретения является создание летательного аппарата с упрощенной механической конструкцией, снижение вибраций, снятие всех ограничений на положение фюзеляжа при полете и траекторию движения.
Поставленная задача решается за счет того, что летательный аппарат, состоящий из фюзеляжа с посадочным шасси, причем внутри вдоль оси фюзеляжа установлен двигатель с соосными редукторами с каждой стороны, обеспечивающие синхронизированное противоположно вращательное движение осей, расположенных друг в друге, с установленными креплениями плоскостей на их концах, например четырех, причем в эти крепления встроены механизмы поворота плоскостей, дополнительно содержит механизмы поворота, например шаговые двигатели, обеспечивающие поворот плоскостей, вращающихся в вертикальной плоскости так, что часть цикла плоскости при движении вниз повернута горизонтально и образует подъемную силу, а часть цикла при движении вверх повернута вертикально и не препятствует образованию подъемной силы других плоскостей. Т.о. реализуется способ полета летательного аппарата на горизонтальном отрезке, содержащий принцип объединения движения машущего крыла в вертикальной плоскости махолета с вращательным движением ротора вертолета. При этом вертикально вращающиеся плоскости синхронно разворачиваются на своей оси механизмами поворота в заданные моменты времени под воздействием системы управления, создавая подъемную силу необходимой величины и тягу в выбранном направлении. Оси плоскостей попарно расположены в механизмах поворота на нескольких противоположно вращающихся (для компенсации раскручивания аппарата) креплениях.
Заявленный летательный аппарат поясняется чертежами, где
- на фиг.1 показан вид аппарата сбоку в разрезе;
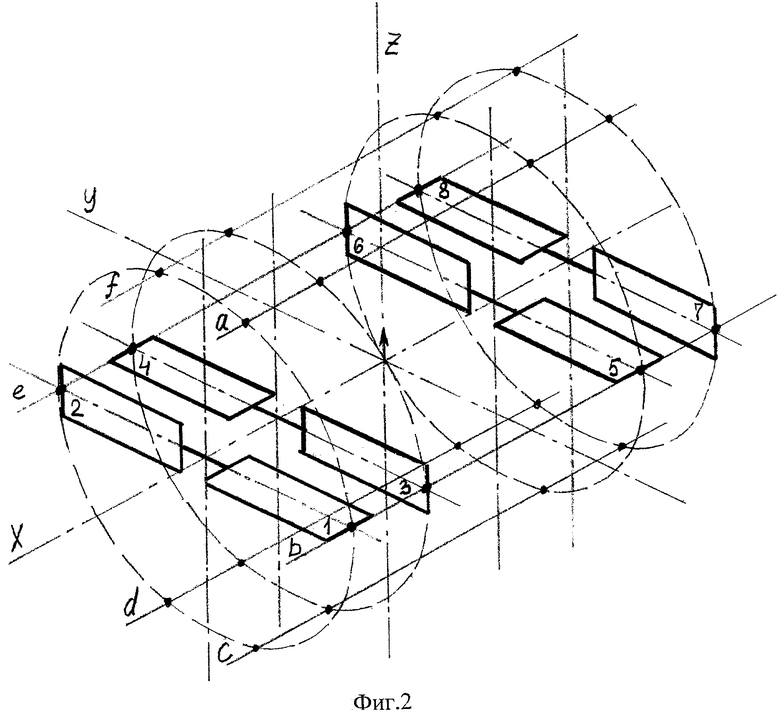
- на фиг.2 - вид в режиме вертикального взлета;
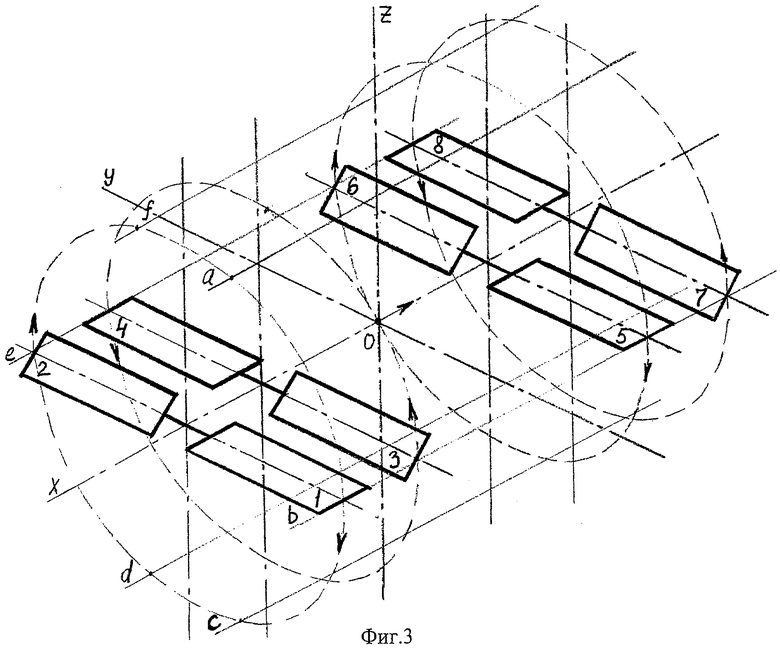
- на фиг.3 - вид в режиме горизонтального полета;
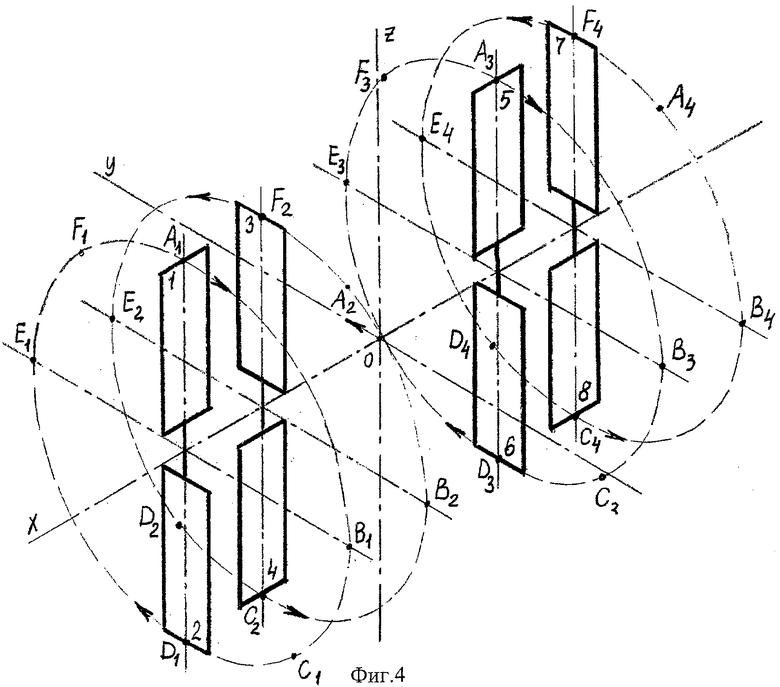
- на фиг.4 - вид в режиме горизонтального полета вбок;
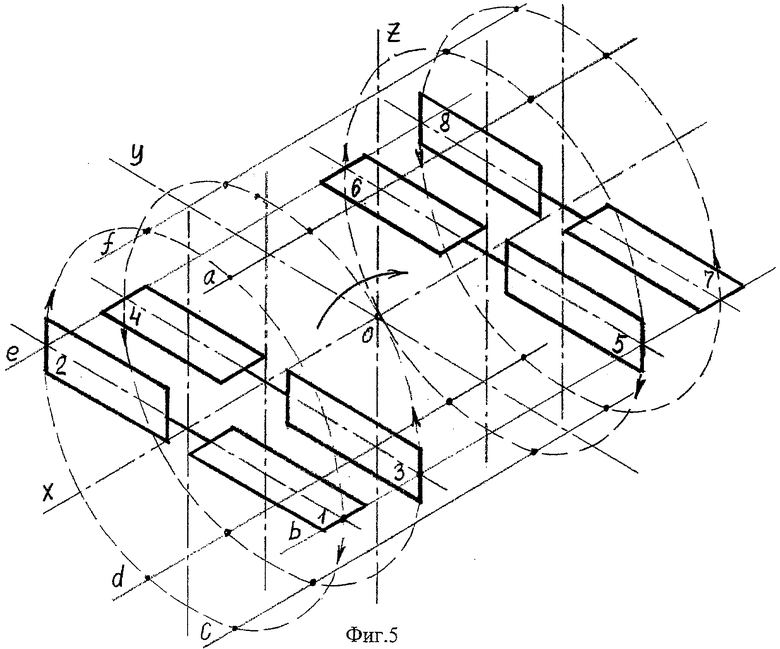
- на фиг.5 - вид в режиме вертикального разворота;
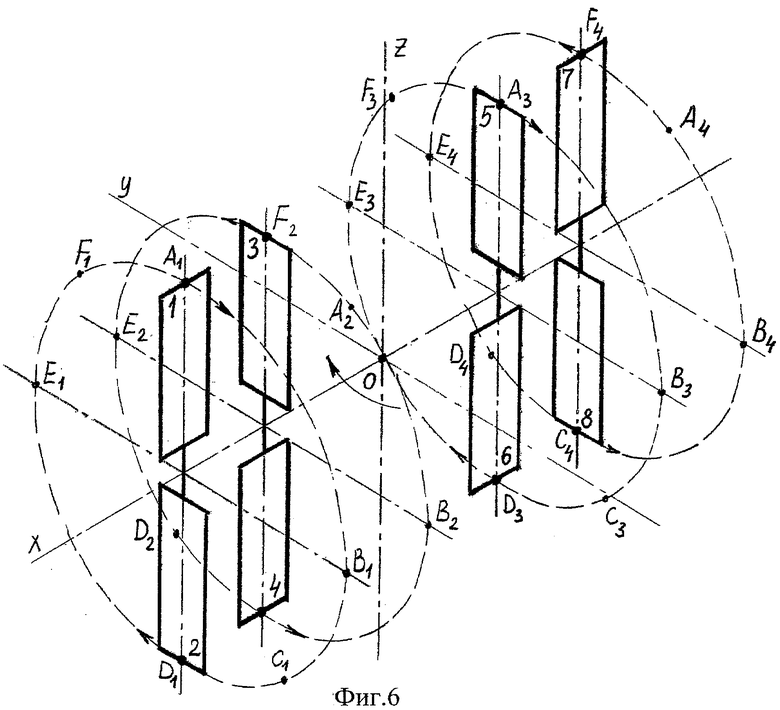
- на фиг.6 - вид в режиме горизонтального разворота.
Пример конкретной реализации.
Заявленный летательный аппарат (фиг.1) представляет собой фюзеляж 9 с посадочными шасси 10 и расположенным вдоль оси фюзеляжа в центре двигателем 1, на выходных валах которого размещены редукторы 2 с выходящими противоположно вращающимися соосными валами 3 внутри валов 4 с закрепленными на их концах креплениями 6 плоскостей. В этих креплениях 6 расположены несколько механизмов поворота 7, например два шаговых двигателя, на оси которых смонтированы плоскости 8. Для обеспечения жесткости на концах валов 4 внутри между ними и валами 3 вмонтированы подшипники 11, а подшипники 12 - снаружи с опорой на фюзеляж 9 через крепление 5 подшипника. Система управления 13 представляет собой бортовой спецкомпьютер, причем управление на механизмы поворота 7 плоскостей передается, например, через скользящие контакты.
Летательный аппарат функционирует следующим образом.
Двигатель 1 приводит во вращение входные валы, расположенные с обеих сторон редукторов 2, обеспечивающих на выходных соосных валах 3, 4 синхронно противоположно направленное вращение закрепленных на их концах креплений 6 плоскостей с механизмами поворота 7, на оси которых смонтированы плоскости 8. Положение плоскостей 8 задается механизмами поворота 7 от системы управления 13, в зависимости от необходимого режима полета согласно режиму полета аппарата, описанного ниже. Посадка аппарата осуществляется на шасси 10, смонтированных на фюзеляже 9 с расположением, например, во всех направлениях в количестве восьми, что позволяет произвести не только посадку на поверхность пола, но и потолок и стены комнаты при включенном двигателе.
Примеры режимов осуществления полета.
В режиме вертикального взлета аппарата по оси z (фиг.2) плоскости 1 и 5 создают подъемную силу в цикле движения вниз от оси а до с (максимум подъемной силы на пересечении с осью b), а плоскости 4 и 8 создают подъемную силу в цикле движения вниз от оси f до d (максимум подъемной силы на пересечении с осью е). Противоположные плоскости 2, 6 движутся вверх от оси d до f и плоскости 3 и 7 движутся вверх от оси с до а, развернувшись на 90° с минимальным сопротивлением воздуха. Сектора, от оси с до d и от f до а, являются зонами разворота плоскостей. Причем плоскости разворачиваются попарно в противоположных направлениях для компенсации возникающей тяги по оси х.
В режиме горизонтального полета аппарата вперед или назад по оси x (фиг.3) плоскости наклоняются, создавая необходимый угол атаки для горизонтальной тяги аппарата одним из трех способов. Первый способ - создание угла атаки движущимися плоскостями вверх (фиг.3) от оси с до а и от оси d до f. Второй - создание угла атаки движущимися плоскостями вниз. Третий - в моменты разворота плоскостей в одном направлении в зонах разворота плоскостей. Возможно одновременное применение нескольких способов создания тяги. Первый способ обеспечивает заявленному аппарату более высокую скорость, по сравнению с вертолетами и махолетами, за счет того, что вектор тяги при небольших углах атаки плоскости почти совпадает с направлением полета аппарата.
В режиме горизонтального полета аппарата в сторону, например влево, по оси у (фиг.4) в более ранней фазе в точке F1 плоскость 1 начинает разворот, и заканчивает его в верхней точке A1, двигаясь перпендикулярно оси у, обеспечивая тягу вдоль этой оси. Аналогично плоскости 4, 5 и 8 создают тягу вдоль оси у в том же направлении, обеспечивая перемещение аппарата. Плоскости 2, 3, 6 и 7 двигаются при этом, развернувшись с минимальным сопротивлением воздуха.
В режиме вертикального разворота аппарата вокруг оси у (фиг.5) плоскости 1, 2, 3 и 4 движутся так же, как при вертикальном взлете, а плоскости 5, 6, 7 и 8 - зеркально, что создает тягу на первой группе плоскостей в одну сторону, а на второй - в другую. Возникающее соскальзывание аппарата вдоль его оси может быть компенсировано дополнительной противоположно направленной тягой вдоль этой оси пропорционально углу наклона, создаваемой как в режиме горизонтального полета. Этим режимом заявленный способ полета превосходит способ полета вертолета.
В режиме горизонтального разворота аппарата вокруг оси z (фиг.6) плоскости 1, 2, 3 и 4 движутся так же, как при полете вбок, а плоскости 5, 6, 7 и 8 - зеркально, что создает тягу на первой группе плоскостей в одну сторону, а на второй - в другую.
Кроме основных режимов полета, описанных выше, существуют множество других, являющихся комбинацией нескольких перечисленных режимов.
Летательный аппарат может иметь на одном креплении плоскостей четыре плоскости для более стабильного полета без вертикальных периодических колебаний, а также другое количество креплений. Плоскости одного крепления могут быть установлены на одной оси с одним механизмом поворота, что сократит вдвое их количество, но при этом уменьшится маневренность аппарата.
Таким образом, предложенное техническое решение летательного аппарата при значительном упрощении механизма конструкции обеспечивает более высокую надежность, уменьшение вибраций и снятие всех ограничений на положение фюзеляжа и траекторию движения.
Источники информации
1. Патент Российской Федерации №2294862.
2. Патент Германии №3210946.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2502642C1 |
| Автомат перекоса многороторного летательного аппарата с жестким креплением лопастей и способ его работы | 2020 |
|
RU2749709C1 |
| Автомат перекоса однороторного летательного аппарата и способ его работы | 2020 |
|
RU2740039C1 |
| Летательный аппарат вертикального взлета и посадки и аэромеханический способ управления поворотом его подъемно-маршевых силовых установок | 2020 |
|
RU2753312C1 |
| ВЕРТОЛЕТ | 1993 |
|
RU2089455C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ - ДОРОЖНЫЙ | 1992 |
|
RU2046063C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ "САМПО" | 2014 |
|
RU2576108C2 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
Изобретение относится к авиационной технике, к летающим роботам и авиамоделизму. Летательный аппарат состоит из фюзеляжа с посадочным шасси, в котором вдоль оси фюзеляжа установлен двигатель с соосными редукторами с каждой стороны. Редукторы обеспечивают синхронизированное противоположно вращательное движение осей, расположенных одна в другой с установленными креплениями плоскостей на их концах. В крепления встроены механизмы поворота плоскостей. Механизмы поворота обеспечивают поворот плоскостей, вращающихся в вертикальной плоскости так, что часть цикла плоскости при движении вниз повернуты горизонтально и образуют подъемную силу, а часть цикла при движении вверх повернуты вертикально и не препятствуют образованию подъемной силы других плоскостей. Достигается улучшение летно-технических характеристик. 6 ил.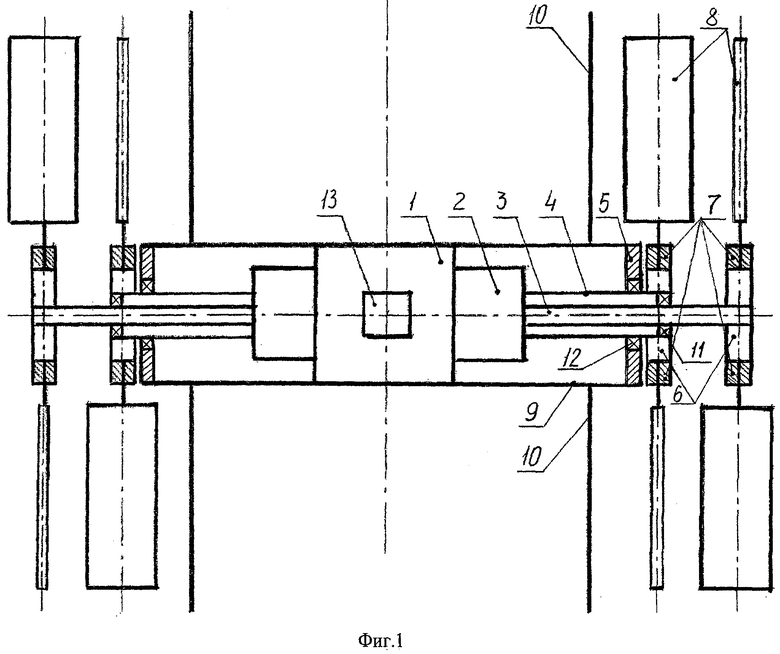
Летательный аппарат, состоящий из фюзеляжа с посадочным шасси, причем внутри вдоль оси фюзеляжа установлен двигатель с соосными редукторами с каждой стороны, обеспечивающими синхронизированное противоположно вращательное движение осей, расположенных одна в другой, с установленными креплениями плоскостей, например четырех, на их концах, причем в эти крепления встроены механизмы поворота плоскостей, отличающийся тем, что механизмы поворота, например шаговые двигатели, обеспечивают поворот плоскостей, вращающихся в вертикальной плоскости так, что часть цикла плоскости при движении вниз повернуты горизонтально и создают подъемную силу, а часть цикла при движении вверх повернуты вертикально и не препятствуют образованию подъемной силы другими плоскостями.
| РОТОРНЫЙ КРЫЛОЛЕТ | 2004 |
|
RU2294862C2 |
| DE 3210946 A1, 06.10.1983 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2001 |
|
RU2223199C2 |
| УЛЬТРАЗВУКОВОЙ СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ПОТОКА ГАЗОВОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2529635C1 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |

