(54) УСТРОЙСТВО СИНХРОНИЗАЦИИ МЕХАНИЗМОВ ПЕРЕДВИЖЕНИЯ КРАНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для синхронизации механизмов передвижения крана | 1984 |
|
SU1253939A1 |
| Устройство синхронизации механиз-MOB пЕРЕдВижЕНия KPAHA | 1978 |
|
SU798021A1 |
| Устройство для управления гидроприводами механизмов передвижения крана мостового типа | 1980 |
|
SU901241A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| Устройство синхронизации механизмов передвижения крана | 1973 |
|
SU483337A1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| Устройство для синхронизации механизмов передвижения опор крана | 1982 |
|
SU1039856A1 |
| Стенд для испытания двух взаимосвязанных электроприводов | 1980 |
|
SU957137A1 |
| Устройство для определения положения опоры крана относительно подкранового пути | 1981 |
|
SU971775A1 |
| Устройство для синхронизации механизмов передвижения крана | 1978 |
|
SU763238A1 |
I
Изобретение относится к подъемно-транспортному машиностроению, а именно к устройствам для ограничения перекоса опор крана и может быть использовано для синхронизации механизмов передвижения крана.
Известно устройство синхронизации механизмов передвижения крана, содержащее сельсин-датчики и сельсин-приемники, связанные соответственно с колесами механизмов передвижения и системой управления приводами механизмов передвижения 1.
Известно также устройство синхрониза-v ции механизмов передвижения крана, содержащее сельсил-датчик и сельсин-приемник, роторы которых кинематически связаны с колесами механизмов передвижения и электрически соединены с дифференциальным сельсином, причём статор сельсин-датчика подключен к источнику питания, а статор сельсин-приемника через фазочувствительный выпрямитель подсоединен к системе управления приводами механизмов передвижения, а также датчики контрольных позиций, расположенные с двух сторон вдоль подкранового пути, датчики перекоса, подключенные к блоку коммутации, и электромеханический блок коррекции 2.
Недостатком известных устройств является сравнительно низкая надежность.
Цель изобретения - повыщение надежности устройства.
Указанная цель достигается тем, что электромеханический блок коррекции выполнен из сельсин-датчиков, роторы которых кинематически связаны с механическим тормозом имеющим электропривод, и с ротором упомянутого дифференциального сельсИна и электрически соединены через соответствующие дифференциальные корректирующие сельсины с роторами сельсин датчиков, кинематически связанных с колесами механизмов передвижения, а статоры сельсин-приемников и сельсин-датчиков электромеханического блока коррекции подключены к источнику питания, причем роторы дифференциальных корректирующих сельсинов соединены с тормозами, при этом электроприводы упомянутых механических тормозов электрически связаны с блоком коммутации.
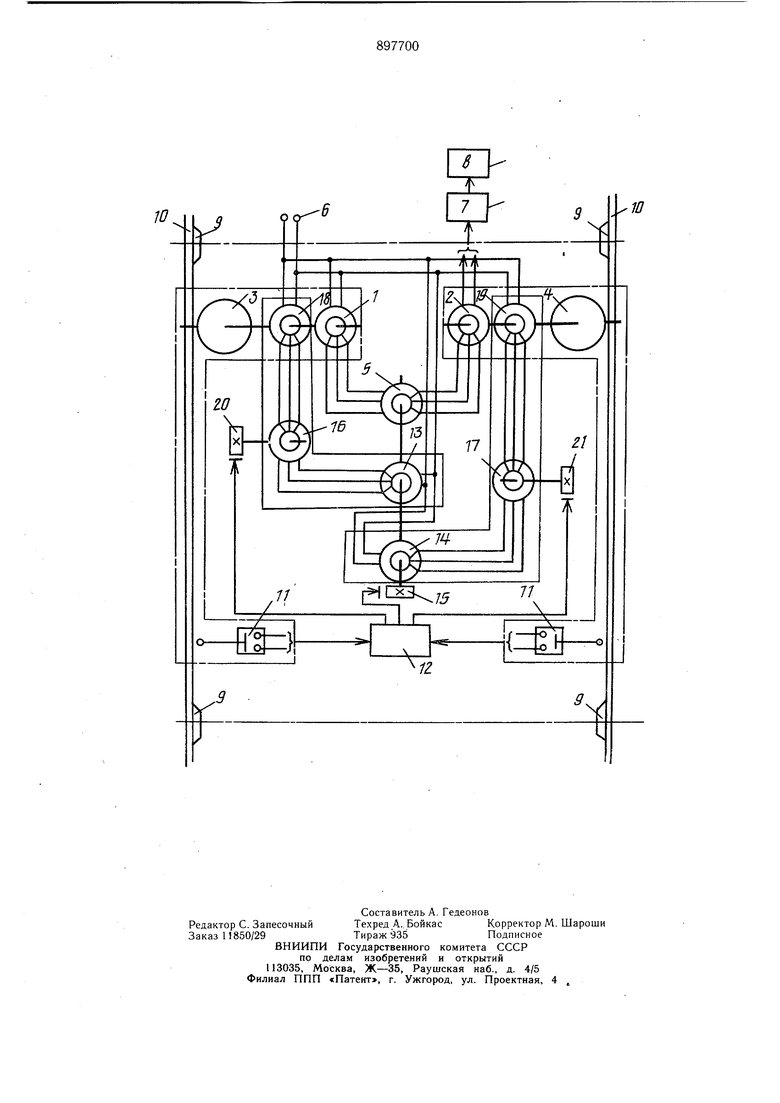
На чертеже изображена схема устройства. Устройство синхронизации механизмов пе редвижения крана содержит сельсин-датчик 1и сельсин-приемник 2, роторы которых кинематически связаны с колесами 3, 4 механизмов передвижения и электрически соединены с дифференциальным сельсином 5, причем статор сельсин-датчика 1 подключен к источнику питания 6, а статор сельсин-приемника 2 через фазочувствительный выпрямитель 7 подсоединен к системе 8 управления приводами механизмов передвижения. Датчики 9 контрольных позиций расположены с двух сторон вдоль подкранового пути 10. Датчики 11 перекоса подключены к блоку 12 коммутации. Электромеханический блок коррекции состоит из сельсин-приемников 13, 14, роторы которых кинематически связаны с механическим тормозом 15, имеющим электропривод, и с ротором сельсина 5 и электрически соединены через соответствующие дифференциальные корректирующие сельсины 16, 17 с роторами сельсин-датчиков 18, 19, кинематически связанных с колесами 3, 4, а статоры сельсинов-датчиков 18, 19 подключены к источнику питания 6. Роторы сельсинов 16, 17 соединены с тормозами 20, 21. Электроприводы тормозов 15, 20,. 21 электрически связаны с блоком 12 коммутации. Устройство работает следующим образом. При движении крана без перекоса при прохождении контрольных позиций датчики 11 замыкаются одновременно, при этом электромеханический блок коррекции не влияет на работу сельсинов 1, 2, 5, тормоз 15 замкнут, тормоза 20, 21 расторможены. Напряжение и фаза на статоре сельсин-приемника 2зависят от угла поворота роторов сельсинов 1, 2 и колес 3, 4. Если кран подходит к датчику 9 контрольной позиции с перекосом и при отсутствии рассогласования колес 3, 4, то ошибка системы синхронизации компенсируется следующим образом. Допустим колесо 3 пришло к датчику 9 контрольной позиции раньше колеса 4. Замыкание одного датчика 11 приводит к изменению состояния блока 12, который размыкает в этом случае тормоз 15 и замыкает тормоз 20. Ротор дифференциального сельсина 16 затормаживается и синхронизирующий момент системы электрического вала вращает расторможенную тройку сельсина 5, 13, 14. Вращение сельсина 5 осуществляется в течение интервала времени от мо.мента замыкания одного датчика 11 до момента замыкания другого датчика 11, после чего блок 12 возвращается в исходное состояние. За время между включениями датчиков 11 сельсин 5 поворачивается на тот же угол, что и сельсин-датчик 19, т. е. на угол, пропорциональный пути рассогласования между опорами крана. Возникающий в результате поворота ротора дифференциального сельсина 5 сигнал синхронизации на выходе фазочувствительного выпрямителя 7 подается в систему 8 управления для коррекции движения опор крана. Таким образо.м, использование изобретения позволяет повысить надежность синхронизации механизмов передвижения опор крана. Формула изобретения Устройство синхронизации механизмов передвижения крана, содержащее сельсиндатчик и сельсин-приемник, роторы которых кинематически связаны с колесами механизмов передвижения и электрически соединены с дифференциальным сельсином, причем статор сельсин-датчика подключен к источнику питания, а статор сельсин-приемника через фазочувствительный выпря.митель подсоединен к системе управления приводами механиз.мов передвижения, а также датчики контрольных позиций, расположенные с двух сторон вдоль подкранового пути, датчики перекоса, подключенные к блоку ко.ммутации, и электромеханический блок коррекции, отличающееся гем, что, с целью повышения надежности, электромеханический блок коррекции выполнен из сельсин-датчиков, роторы которых кинематически связаны с механическим тормозом, имеющим электропривод, и с ротором упомянутого дифференциального сельсина и электрически соединены через соответствующие дифференциальные корректирующие сельсины с ротора.ми сельсин-приемников, кинематически связанных с колесами механизмов передвижения, а статор.ы сельсин-прие.мников и сельсин-датчиков электромеханического блока коррекции подключены к источнику питания, причем роторы дифференциальных корректирующих сельсинов соединены с тормозами, при этом электроприводы упомянутых механических тормозов электрически связаны с блоком коммутации. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 680978, кл. В 66 С 9/16, 1978. 2.Авторское свидетельство СССР по заявке № 2696036/11, кл. В 66 С 9/16, 14.i2.78 (прототип).
