(54) ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО
ТИПА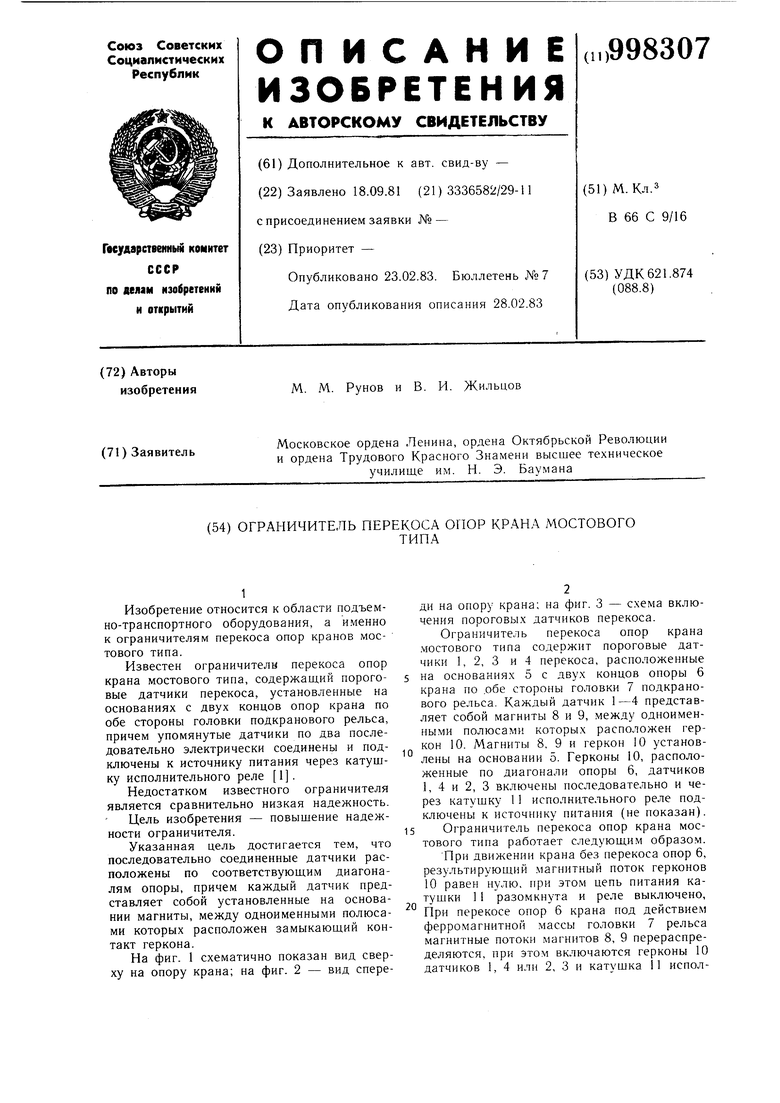
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| УСТРОЙСТВО ДЛЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ МОСТОВОГО КРАНА | 2009 |
|
RU2405735C1 |
| ОГРАНИЧИТЕЛЬ ПЕРЕКОСА ОПОР КРАНА МОСТОВОГО ТИПА | 1993 |
|
RU2061645C1 |
| Ограничитель перекоса мостового крана | 1977 |
|
SU691381A1 |
| Ограничитель перекоса крана | 1976 |
|
SU557044A1 |
| Привод механизма перемещения опор мостового крана | 1985 |
|
SU1321661A1 |
| Устройство для определения положения опоры крана относительно подкранового пути | 1981 |
|
SU971775A1 |
| Устройство для регулирования уровня воды в канале | 1983 |
|
SU1095144A1 |
| Устройство для приема сигналов автоматической локомотивной сигнализации | 1978 |
|
SU745755A1 |
| Ограничитель перекоса опор крана мостового типа | 1981 |
|
SU948843A1 |
1
Изобретение относится к области подъемно-транспортного оборудования, а и.менно к ограничителям перекоса опор кранов мостового типа.
Известен ограничители перекоса опор крана мостового типа, содержащий пороговые датчики перекоса, установленные на основаниях с двух концов опор крана по обе стороны головки подкранового рельса, причем упомянутые датчики по два последовательно электрически соединены и подключены к источнику питания через катушку исполнительного реле 1.
Недостатком известного ограничителя является сравнительно низкая надежность.
Цель изобретения - повышение надежности ограничителя.
Указанная цель достигается тем, что последовательно соединенные датчики расположены по соответствующим диагоналям опоры, причем каждый датчик представляет собой установленные на основании магниты, между одноименными полюсами которых расположен замыкающий контакт геркона.
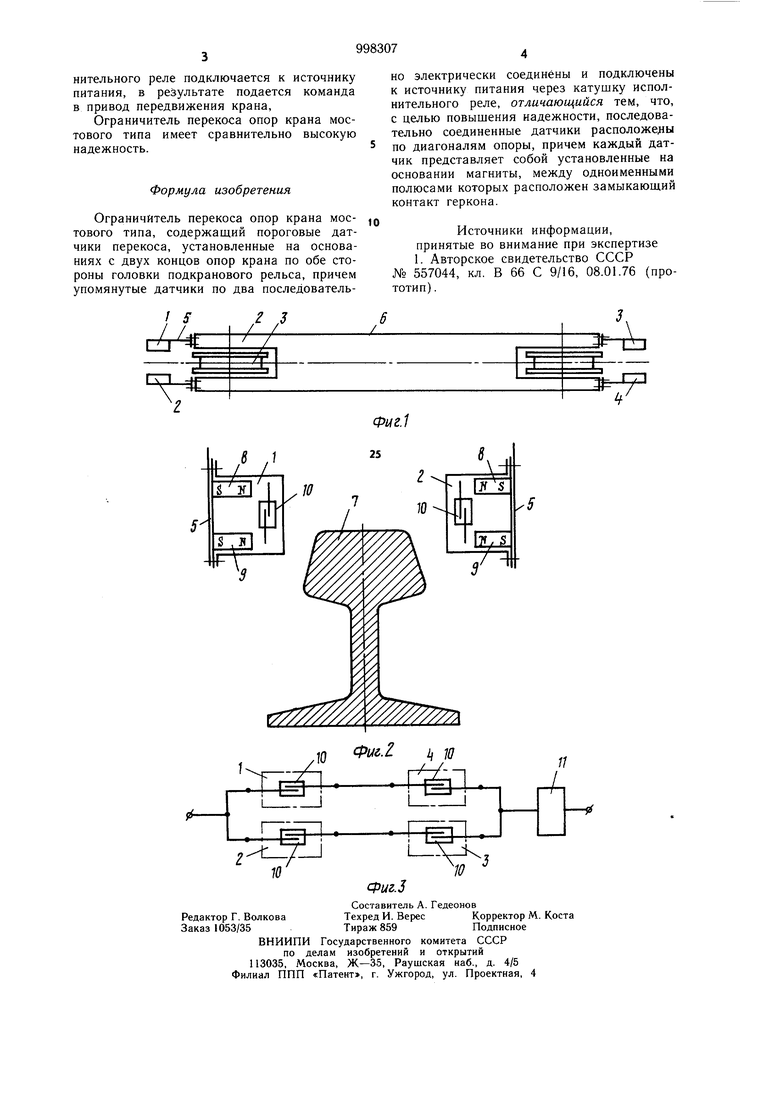
На фиг. 1 схематично показан вид сверху на опору крана; на фиг. 2 - вид спереди на опору крана; на фиг. 3 - схема включения пороговых датчиков перекоса.
Ограничитель перекоса опор крана .мостового типа содержит пороговые датчики 1, 2, 3 и 4 перекоса, расположенные 5 на основаниях 5 с двух концов опоры 6 крана по .обе стороны головки 7 подкранового рельса. Каждый датчик 1-4 представляет собой магниты 8 и 9, между одноименными полюсами которых расположен геркон 10. Магниты 8, 9 и геркон 10 установ10лены на основании 5. Герконы 10, расположенные по диагонали опоры 6, датчиков 1, 4 и 2, 3 включены последовательно и через катушку 1 исполнительного реле подключены к источнику питания (не показан).
Ограничитель перекоса опор крана мос15тового типа работает следующим образом.
При движении крана без перекоса опор 6, результирующий магнитный поток герконов 10 равен нулю, при этом цепь питания катушки 1 1 разомкнута и реле выключено.
20 При перекосе опор 6 крана под действием ферромагнитной массы головки 7 рельса магнитные потоки магнитов 8, 9 перераспределяются, при этом включаются герконы 10 датчиков 1, 4 или 2, 3 и катушка 11 исполнительного реле подключается к источнику питания, в результате подается команда в привод передвижения крана,
Ограничитель перекоса опор крана мостового типа имеет сравнительно высокую надежность.
Формула изобретения
Ограничитель перекоса опор крана мостового типа, содержащий пороговые датчики перекоса, установленные на основаниях с двух концов опор крана по обе стороны головки подкранового рельса, причем упомянутые датчики по два последовательно электрически соединены и подключены к источнику питания через катушку исполнительного реле, отличающийся тем, что, с целью повышения надежности, последовательно соединенные датчики расположены по диагоналям опоры, причем каждый датчик представляет собой установленные на основании магниты, между одноименными полюсами которых расположен замыкающий контакт геркона.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 557044, кл. В 66 С 9/16, 08.01.76 (прототип).
