Изобретение относится к области вторичной цифровой обработки радиолокационных сигналов и может быть использовано для распознавания характера полета пары самолетов, летящих в сомкнутом боевом порядке, по принципу «стационарный полет пары (при различных дистанциях между самолетами пары) - маневр в паре (например, разгон, торможение с различными параметрами) - маневр составом пары (например, «разворот», «змейка» с различными параметрами).
Известен способ сопровождения группы самолетов, заключающийся в отслеживании их центроида и боковых траекторий, распознавании на основе сравнения переменных состояния центральной и боковых траекторий отделяющихся целей от группы [1].
Недостатком данного способа сопровождения группы самолетов являются его ограниченные функциональные возможности, не позволяющие распознать характер полета, в частности, пары самолетов, летящих в сомкнутом боевом порядке, по принципу «стационарный полет пары» - маневр самолетов в составе пары - маневр составом пары».
Известен способ сопровождения воздушных целей, основанный на процедуре оптимальной многомерной линейной дискретной калмановской фильтрации, описываемой выражениями [2]
где  - номер такта работы калмановского фильтра;
- номер такта работы калмановского фильтра;
K - общее количество тактов работы калмановского фильтра;
Р-(k+1) и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Ф(k) - переходная матрица состояния;
Q(k+l) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов;
I - единичная матрица;
 - вектор текущих и экстраполированных оценок доплеровских частот;
- вектор текущих и экстраполированных оценок доплеровских частот;
Н(k) - матрица наблюдения;
Y(k) - вектор наблюдения отсчетов доплеровских частот;
Z(k+l) - матрица невязок измерения;
Ψ(k+1) - матрица априорных ошибок фильтрации;
"-1" - операция вычисления обратной матрицы;
"т" - операция транспонирования матрицы.
Недостатком данного способа являются его ограниченные функциональные возможности, не позволяющие распознать характер полета пары самолетов, летящих в сомкнутом боевом порядке, по принципу «стационарный полет пары» - маневр самолетов в составе пары - маневр составом пары».
Цель изобретения - распознать характер полета пары самолетов, летящих в сомкнутом боевом порядке, по принципу «стационарный полет пары» - маневр самолетов в составе пары - маневр составом пары».
Для достижения цели в способе сопровождения воздушных целей, заключающемся в вычислении процедуры оптимальной многомерной линейной дискретной калмановской фильтрации в соответствии с выражениями (1)-(6), дополнительно по входным отсчетам доплеровских частот, формируемых на основе динамических моделей различного характера полета самолета из состава их пары (стационарный полет самолетов с его параметрами, маневр самолетов в составе пары с его параметрами, маневр самолетов составом пары с его параметрами), одновременно осуществляется процедура оптимальной многомерной линейной дискретной калмановской фильтрации (1)-(6) в каждом оптимальном фильтре ОФj их матрицы-строки (где  J - количество вариантов динамики полета самолета в сомкнутом боевом порядке) при различных априорных данных, принятых при фильтрации в каждом ОФj их матрицы-строки относительно j-го варианта динамики его полета в виде соответствующих динамических моделей, аналогичных динамическим моделям при формировании отсчетов доплеровских частот, подаваемых на входы соответствующих оптимальных фильтров ОФj.
J - количество вариантов динамики полета самолета в сомкнутом боевом порядке) при различных априорных данных, принятых при фильтрации в каждом ОФj их матрицы-строки относительно j-го варианта динамики его полета в виде соответствующих динамических моделей, аналогичных динамическим моделям при формировании отсчетов доплеровских частот, подаваемых на входы соответствующих оптимальных фильтров ОФj.
Для каждого оптимального фильтра их матрицы-строки производится вычисление соответствующих значений  в соответствии с выражением
в соответствии с выражением

По вычисленным значениям  в течение K тактов работы всех оптимальных фильтров их матрицы-строки, подаваемых одновременно на j-е входы двух идентичных нейронных сетей, осуществляется их обучение.
в течение K тактов работы всех оптимальных фильтров их матрицы-строки, подаваемых одновременно на j-е входы двух идентичных нейронных сетей, осуществляется их обучение.
При принятии решения путем пороговой обработки амплитудно-частотного спектра радиолокационного сигнала, отраженного от пары самолетов, формируются два отсчета доплеровских частот, которые поступают на объединенные входы соответственно оптимальных фильтров ОФ1j их первой матрицы-строки и объединенные входы оптимальных фильтров ОФ2j их второй матрицы-строки, функционирующих в соответствии с процедурой (1)-(6) при тех же априорных данных, принятых при фильтрации в каждом ОФ1j и ОФ2j соответствующих их матриц-строк относительно j-го варианта динамики полета самолета в виде соответствующих динамических моделей, что и при обучении нейронных сетей для различных j-x вариантов динамики полета самолетов (стационарный полет самолетов с его параметрами, маневр самолетов в составе пары с его параметрами, маневр самолетов составом пары с его параметрами).
Для каждого оптимального фильтра ОФ1j и ОФ2j соответствующей матрицы-строки за K тактов их работы производится вычисление соответствующих оценок  в соответствии с выражениями
в соответствии с выражениями
По вычисленным оценкам  поступающими параллельно на соответствующие j-e входы соответствующих нейронных сетей, осуществляется принятие решения о характере полета каждого самолета пары. При этом архитектура каждой нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из первого входного слоя нейронной сети, на j-e входы которого последовательно подаются соответствующие значения
поступающими параллельно на соответствующие j-e входы соответствующих нейронных сетей, осуществляется принятие решения о характере полета каждого самолета пары. При этом архитектура каждой нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из первого входного слоя нейронной сети, на j-e входы которого последовательно подаются соответствующие значения  - при обучении нейронных сетей и оценки
- при обучении нейронных сетей и оценки  - при принятии решения о характере полета каждого самолета группы, второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации, третьего выходного слоя сети, на j-x выходах которого формируются соответствующие оценки значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары, максимальные значения которых на выходе каждой нейронной сети, будут соответствовать результирующей оценке вероятности правильного распознавания характера полета соответствующего самолета из состава их пары.
- при принятии решения о характере полета каждого самолета группы, второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации, третьего выходного слоя сети, на j-x выходах которого формируются соответствующие оценки значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары, максимальные значения которых на выходе каждой нейронной сети, будут соответствовать результирующей оценке вероятности правильного распознавания характера полета соответствующего самолета из состава их пары.
Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Формирование отсчетов доплеровских частот на основе динамических моделей различного характера полета самолета из состава их пары.
2. Осуществление процедур оптимальной многомерной линейной дискретной калмановской фильтрации (1)-(6) входных отсчетов доплеровских частот, формируемых на основе динамических моделей различного характера полета самолета из состава их пары, в каждом оптимальном фильтре ОФj их матрицы-строки (где  J - количество вариантов динамики полета самолета в сомкнутом боевом порядке) при различных априорных данных, принятых при фильтрации в каждом ОФj их матрицы-строки относительно j-го варианта динамики его полета в виде соответствующих динамических моделей, аналогичных динамическим моделям при формировании отсчетов доплеровских частот, подаваемых на входы соответствующих оптимальных фильтров ОФj.
J - количество вариантов динамики полета самолета в сомкнутом боевом порядке) при различных априорных данных, принятых при фильтрации в каждом ОФj их матрицы-строки относительно j-го варианта динамики его полета в виде соответствующих динамических моделей, аналогичных динамическим моделям при формировании отсчетов доплеровских частот, подаваемых на входы соответствующих оптимальных фильтров ОФj.
3. Одновременное обучение двух идентичных нейронных сетей по вычисленным за K тактов работы всех оптимальных фильтров значениям  в соответствии с выражением (7) в каждом оптимальном фильтре их матрицы-строки.
в соответствии с выражением (7) в каждом оптимальном фильтре их матрицы-строки.
4. Формирование при принятии решения о характере полета пары самолетов двух отсчетов доплеровских частот путем пороговой обработки спектрального доплеровского портрета радиолокационного сигнала, которые поступают на объединенные входы соответственно оптимальных фильтров ОФ1j их первой матрицы-строки и объединенные входы оптимальных фильтров ОФ2j их второй матрицы-строки, функционирующих в соответствии с процедурой (1)-(6) при тех же априорных данных, принятых при фильтрации в каждом ОФ1j и ОФ2j соответствующих их матриц-строк относительно j-го варианта динамики его полета в виде соответствующих динамических моделей, что и при обучении нейронных сетей для различных j-x вариантов динамики полета самолетов и вычисление для каждого оптимального фильтра ОФ1j и ОФ2j соответствующей матрицы-строки за K тактов их работы соответствующих оценок  в соответствии с выражениями (8) и (9).
в соответствии с выражениями (8) и (9).
5. Принятие решения по вычисленным оценкам  и
и  поступающими параллельно на соответствующие j-e входы соответствующих нейронных сетей, о характере полета каждого самолета пары.
поступающими параллельно на соответствующие j-e входы соответствующих нейронных сетей, о характере полета каждого самолета пары.
6. Использование двух идентичных нейронных сетей при принятии решения о характере полета пары самолетов.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков в совокупности с известными позволит распознать характер полета пары самолетов, летящих в сомкнутом боевом порядке, по принципу «стационарный полет пары» - маневр самолетов в составе пары - маневр составом пары».
На фигуре приведена блок-схема, поясняющая предлагаемый способ распознавания характера полета пары самолетов при ее сопровождении на основе калмановской фильтрации и нейронной сети.
Предлагаемый способ распознавания характера полета пары самолетов при ее сопровождении на основе калмановской фильтрации и нейронной сети осуществляется следующим образом (фигура).
В вычислителе 1 на основе j-x (где  J - количество вариантов динамики полета самолета в сомкнутом боевом порядке) динамических моделей различного характера полета самолета из состава их пары (стационарный полет самолетов с его параметрами, маневр самолетов в составе пары с его параметрами, маневр самолетов составом пары с его параметрами) формируются соответствующие отчеты Fj доплеровских частот, которые одновременно поступают на входы соответствующих оптимальных фильтров 2j их блока 3 матрицы-строки. Каждый оптимальный фильтр 2j их блока 3 матрицы-строки функционирует в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрацией (1)-(6) при различных априорных данных, принятых при фильтрации в виде соответствующих динамических моделей, аналогичных динамическим моделям при формировании отсчетов Fj доплеровских частот.
J - количество вариантов динамики полета самолета в сомкнутом боевом порядке) динамических моделей различного характера полета самолета из состава их пары (стационарный полет самолетов с его параметрами, маневр самолетов в составе пары с его параметрами, маневр самолетов составом пары с его параметрами) формируются соответствующие отчеты Fj доплеровских частот, которые одновременно поступают на входы соответствующих оптимальных фильтров 2j их блока 3 матрицы-строки. Каждый оптимальный фильтр 2j их блока 3 матрицы-строки функционирует в соответствии с процедурой оптимальной многомерной линейной дискретной калмановской фильтрацией (1)-(6) при различных априорных данных, принятых при фильтрации в виде соответствующих динамических моделей, аналогичных динамическим моделям при формировании отсчетов Fj доплеровских частот.
В блоке 4 вычислителей для каждого оптимального фильтра 2j их матрицы-строки в соответствующих вычислителях 5j производится вычисление соответствующих значений  (где индекс «о» - обучение) в соответствии с выражением (7).
(где индекс «о» - обучение) в соответствии с выражением (7).
По вычисленным значениям  в течение K тактов работы всех оптимальных фильтров 2j блока 3 их матрицы-строки, подаваемых через коммутатор 6 одновременно на j-e входы двух идентичных нейронных сетей 7 и 8, осуществляется их обучение.
в течение K тактов работы всех оптимальных фильтров 2j блока 3 их матрицы-строки, подаваемых через коммутатор 6 одновременно на j-e входы двух идентичных нейронных сетей 7 и 8, осуществляется их обучение.
После обучения двух идентичных нейронных сетей 7 и 8 осуществляется принятие решения о характере полета каждого самолета пары следующим образом.
Радиолокационный сигнал S(t), отраженный от пары самолетов, летящих в сомкнутом БП, на промежуточной частоте поступает на вход блока 9 быстрого преобразования Фурье, на выходе которого формируется его амплитудно-частотный спектр S(ƒ). Путем его пороговой обработки в формирователе 10 формируются два отсчета доплеровских частот F1 и F2, которые поступают на объединенные входы соответственно оптимальных фильтров 111j блока 12 их первой матрицы-строки и объединенные входы оптимальных фильтров 132j блока 14 их второй матрицы-строки, функционирующих в соответствии с процедурой (1)-(6), при тех же априорных данных, принятых при фильтрации в каждом 111j и 132j соответствующих блоков 12 и 14 их матриц-строк относительно j-го варианта динамики полета самолета в виде соответствующих динамических моделей, что и при обучении нейронных сетей для различных j-x вариантов динамики полета целей.
В блоках 15 и 17 вычислителей для каждого оптимального фильтра 111j и 132j соответствующих блоков 12 и 14 матриц-строк за К тактов их работы в соответствующих вычислителях 161j и 182j производится вычисление соответствующих оценок  (где индекс «р» - распознавание) в соответствии с выражениями (8) и (9).
(где индекс «р» - распознавание) в соответствии с выражениями (8) и (9).
По вычисленным оценкам  поступающими параллельно через коммутатор 6 на соответствующие j-e входы соответствующих нейронных сетей 7 и 8, осуществляется принятие решения о характере полета каждого самолета пары.
поступающими параллельно через коммутатор 6 на соответствующие j-e входы соответствующих нейронных сетей 7 и 8, осуществляется принятие решения о характере полета каждого самолета пары.
Архитектура каждой нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из первого входного слоя нейронной сети, на j-e входы которого последовательно подаются соответствующие значения  - при обучении нейронных сетей и оценки
- при обучении нейронных сетей и оценки  - при принятии решения о характере полета каждого самолета группы, второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации, третьего выходного слоя сети, на j-x выходах которого формируются соответствующие оценки значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары, которые параллельно поступают на соответствующие входы блоков 19 и 20 определения максимального значения вероятности. На их выходах будут сформированы максимальные значения, которые соответствуют результирующей оценке вероятности правильного распознавания характера полета соответствующего самолета из состава их пары по принципу «стационарный полет - маневр в составе пары - маневр составом пары».
- при принятии решения о характере полета каждого самолета группы, второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации, третьего выходного слоя сети, на j-x выходах которого формируются соответствующие оценки значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары, которые параллельно поступают на соответствующие входы блоков 19 и 20 определения максимального значения вероятности. На их выходах будут сформированы максимальные значения, которые соответствуют результирующей оценке вероятности правильного распознавания характера полета соответствующего самолета из состава их пары по принципу «стационарный полет - маневр в составе пары - маневр составом пары».
В [3] приведены примеры динамических моделей с их численными значениями параметров стационарного полета пары самолетов при выдерживании ведомым самолетом (сзади летящим) заданной дистанции относительно ведущего (впереди летящего) самолета в сомкнутом боевом порядке.
В [4] приведены примеры динамических моделей с их численными значениями полета пары самолетов в сомкнутом боевом порядке при маневрировании в составе пары (ведущий самолет - стационарный полет, ведомый самолет - маневр типа «догон» с разгоном и торможением) и составом пары (ведущий и ведомый самолеты синхронно осуществляют маневры типа «разворот», «змейка»).
В [5] приведена архитектура каждой нейронной сети, которая представляет собой многослойную нейронную сеть прямого распространения, состоящую из первого входного слоя, второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации и третьего выходного слоя, на выходах которого формируются соответствующие оценки значений вероятностей распознавания.
Для оценки работоспособности предлагаемого способа было проведено его имитационное моделирование по радиолокационным сигналам, отраженным от реальной пары самолетов, летящих в сомкнутом боевом порядке и осуществляющих: стационарный полет при выдерживании ведомым самолетом различной заданной дистанции относительно ведущего самолета; маневр в паре типа «догон» ведомым самолетом относительно ведущего, который осуществлял стационарный полет; маневры составом пары типа «разворот» и «змейка». Данные реальные радиолокационные сигналы были зарегистрированы на промежуточной частоте с выхода линейной части приемника РЛС с фазированной антенной решеткой, функционирующей по импульсно-доплеровскому принципу обработки сигналов и работающей в сантиметровом диапазоне волн, в процессе проведения летно-экспериментальные исследований. Регистрация сигналов осуществлялась на удалении 80-100 км в переднюю полусферу.
Для формирования отсчетов доплеровских частот применялся алгоритм быстрого преобразования Фурье с эквивалентной полосой пропускания одного бина, равной 10 Гц.
В вычислителе 1, оптимальных фильтрах 2 ОФj блока 3 их матрицы-строки, 11 ОФj блока 12 их матрицы-строки и 13 ОФj блока 14 их матрицы-строки использовались одинаковые динамические модели, построенные в соответствии с [3, 4].
В результате имитационного моделирования установлено, что при отношениях сигнал/шум 14-24 дБ вероятность правильного распознавания характера полета пары самолетов, летящих в сомкнутом боевом порядке, составляет 0,92-0,95.
Таким образом, предлагаемое изобретение позволит распознать характер полета пары самолетов по принципу «стационарный полет - маневр в составе пары - маневр составом пары» при ее сопровождении.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. / Пер. с англ. - М.: Радио и связь, 1993, с. 246-248 (аналог).
2. Казаринов, Ю.М. Проектирование устройств фильтрации радиосигналов / Ю.М. Казаринов, А.И. Соколов, Ю.С. Юрченко // - Л.: изд. Ленинградского университета. - 1985. - стр. 150-151 (прототип).
3. Богданов, А.В. Методика построения динамических моделей радиальных скоростей и ускорений пары воздушных целей, летящих в сомкнутом боевом порядке / А.В. Богданов, О.В. Васильев, В.А. Голубенко, С.М. Маняшин, А.А. Филонов // Теория и системы управления, 2007. - №4.
4. Богданов, А.В. Методика построения динамических моделей радиальных скоростей и ускорений пары воздушных целей, летящих в сомкнутом боевом порядке, с учетом их маневра в паре и составом пары / А.В. Богданов, А.А. Филонов, А.Ю. Чистилин, В.И. Павлов, А.К. Ибрагим // Радиотехника, 2010. - №5.
5. Татузов, А.Л. Нейронные сети в задачах радиолокации. - М.: Радиотехника, 2009.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ | 2006 |
|
RU2324952C1 |
| Способ всеракурсного распознавания в радиолокационной станции типового состава групповой воздушной цели при различных условиях полета и воздействии уводящих по скорости помех на основе калмановской фильтрации и нейронной сети | 2023 |
|
RU2816189C1 |
| Способ распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2786518C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ всеракурсного распознавания типового состава групповой воздушной цели из класса "самолеты с турбореактивными двигателями" на основе калмановской фильтрации и нейронных сетей | 2024 |
|
RU2835772C1 |
| Способ многопризнакого распознавания в многофункциональной радиолокационной станции класса летательного аппарата по принципу "самолет с турбореактивным двигателем - самолет с турбовинтовым двигателем - вертолет - ракета - беспилотный летательный аппарат" на основе совместного применения калмановской фильтрации и нейронной сети | 2024 |
|
RU2832712C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ ИЗ КЛАССА "САМОЛЁТ С ТУРБОРЕАКТИВНЫМ ДВИГАТЕЛЕМ" ПРИ ВОЗДЕЙСТВИИ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2015 |
|
RU2579353C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на вертолёт при различном характере его полёта | 2019 |
|
RU2726273C1 |
| Способ распознавания функционального назначения летательных аппаратов пары по принципу "ведущий-ведомый" | 2019 |
|
RU2726869C1 |
| ЦИФРОВОЙ БЛОК ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1998 |
|
RU2123709C1 |
Изобретение относится к области вторичной цифровой обработки радиолокационных сигналов и может быть использовано для распознавания характера полета пары самолетов, летящих в сомкнутом боевом порядке, по принципу «стационарный полет пары (при различных дистанциях между самолетами пары) - маневр в паре (например, разгон, торможение с различными параметрами) - маневр составом пары (например, «разворот», «змейка» с различными параметрами). Техническим результатом является создание способа для распознавания характера полета пары самолетов, летящих в сомкнутом боевом порядке, по принципу «стационарный полет пары - маневр самолетов в составе пары - маневр составом пары». В заявленном способе по входным отсчетам доплеровских частот, формируемых на основе динамических моделей различного характера полета самолета из состава их пары, осуществляют процедуру оптимальной многомерной линейной дискретной калмановской фильтрации в каждом оптимальном фильтре OФj их матрицы-строки (где 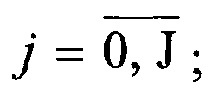 J - количество вариантов динамики полета самолета в сомкнутом боевом порядке) при различных априорных данных, принятых в виде соответствующих динамических моделей. Для каждого оптимального фильтра их матрицы-строки производится вычисление соответствующих оценок значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары. Вычисленные значения оценок в течение K тактов работы всех оптимальных фильтров их матрицы-строки подают одновременно на j-е входы двух идентичных нейронных сетей и осуществляют их обучение. Путем пороговой обработки амплитудно-частотного спектра радиолокационного сигнала, отраженного от пары самолетов, формируют два отсчета доплеровских частот, которые поступают на объединенные входы соответственно оптимальных фильтров OФ1j их первой матрицы-строки и объединенные входы оптимальных фильтров OФ2j их второй матрицы-строки. Далее для каждого оптимального фильтра OФ1j и OФ2j соответствующей матрицы-строки за K тактов их работы производится вычисление оценок значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары, которые поступают параллельно на соответствующие j-e входы соответствующих нейронных сетей и по которым осуществляют принятие решения о характере полета каждого самолета пары. 1 ил.
J - количество вариантов динамики полета самолета в сомкнутом боевом порядке) при различных априорных данных, принятых в виде соответствующих динамических моделей. Для каждого оптимального фильтра их матрицы-строки производится вычисление соответствующих оценок значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары. Вычисленные значения оценок в течение K тактов работы всех оптимальных фильтров их матрицы-строки подают одновременно на j-е входы двух идентичных нейронных сетей и осуществляют их обучение. Путем пороговой обработки амплитудно-частотного спектра радиолокационного сигнала, отраженного от пары самолетов, формируют два отсчета доплеровских частот, которые поступают на объединенные входы соответственно оптимальных фильтров OФ1j их первой матрицы-строки и объединенные входы оптимальных фильтров OФ2j их второй матрицы-строки. Далее для каждого оптимального фильтра OФ1j и OФ2j соответствующей матрицы-строки за K тактов их работы производится вычисление оценок значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары, которые поступают параллельно на соответствующие j-e входы соответствующих нейронных сетей и по которым осуществляют принятие решения о характере полета каждого самолета пары. 1 ил.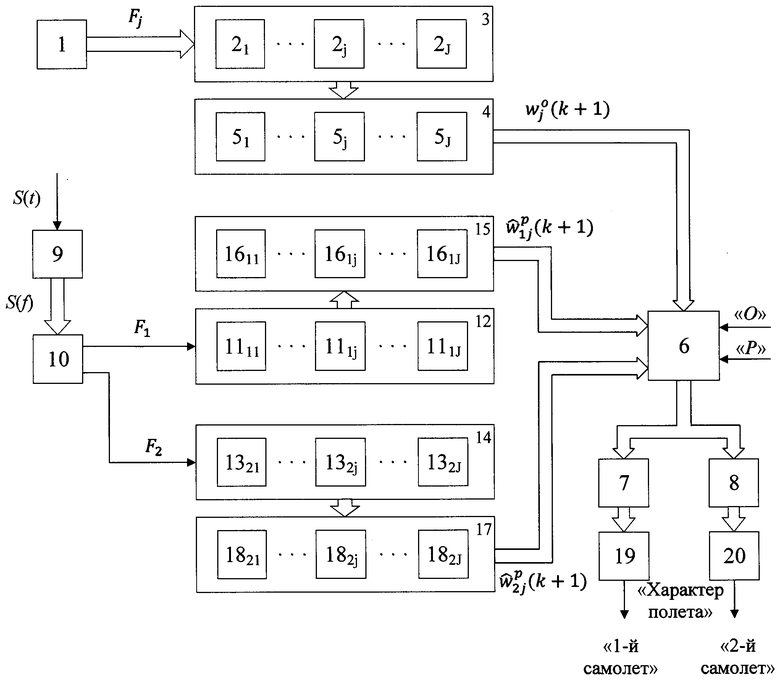
Способ распознавания характера полета пары самолетов при ее сопровождении на основе калмановской фильтрации и нейронной сети, заключающийся в вычислении процедуры оптимальной многомерной линейной дискретной калмановской фильтрации в соответствии с выражениями
где  - номер такта работы калмановского фильтра;
- номер такта работы калмановского фильтра;
K - общее количество тактов работы калмановского фильтра;
Р-(k+1) и Р(k+1) - ковариационные матрицы ошибок экстраполяции и фильтрации соответственно;
Φ(k) - переходная матрица состояния;
Q(k+1) и R(k+1) - ковариационные матрицы шумов возбуждения и наблюдения соответственно;
S(k+1) - матрица весовых коэффициентов;
I - единичная матрица;
 - вектор текущих и экстраполированных оценок доплеровских частот;
- вектор текущих и экстраполированных оценок доплеровских частот;
Н(k) - матрица наблюдения;
Y(k) - вектор наблюдения отсчетов доплеровских частот;
Z(k+1) - матрица невязок измерения;
Ψ(k+1) - матрица априорных ошибок фильтрации;
"-1"- операция вычисления обратной матрицы;
"т" - операция транспонирования матрицы,
отличающийся тем, что по входным отсчетам доплеровских частот, формируемых на основе динамических моделей различного характера полета самолета из состава их пары: стационарный полет самолетов с его параметрами; маневр самолетов в составе пары с его параметрами; маневр самолетов составом пары с его параметрами, одновременно осуществляется процедура оптимальной многомерной линейной дискретной калмановской фильтрации (1)-(6) в каждом оптимальном фильтре OФj их матрицы-строки, где  J - количество вариантов динамики полета самолета в сомкнутом боевом порядке, при различных априорных данных, принятых при фильтрации в каждом OФj их матрицы-строки относительно j-го варианта динамики его полета в виде соответствующих динамических моделей, аналогичных динамическим моделям при формировании отсчетов доплеровских частот, подаваемых на входы соответствующих оптимальных фильтров OФj, для каждого оптимального фильтра их матрицы-строки производится вычисление соответствующих значений
J - количество вариантов динамики полета самолета в сомкнутом боевом порядке, при различных априорных данных, принятых при фильтрации в каждом OФj их матрицы-строки относительно j-го варианта динамики его полета в виде соответствующих динамических моделей, аналогичных динамическим моделям при формировании отсчетов доплеровских частот, подаваемых на входы соответствующих оптимальных фильтров OФj, для каждого оптимального фильтра их матрицы-строки производится вычисление соответствующих значений  в соответствии с выражением
в соответствии с выражением

по вычисленным значениям в течение K тактов работы всех оптимальных фильтров их матрицы-строки, подаваемых одновременно на j-e входы двух идентичных нейронных сетей, осуществляется их обучение, при принятии решения путем пороговой обработки амплитудно-частотного спектра радиолокационного сигнала, отраженного от пары самолетов, формируются два отсчета доплеровских частот, которые поступают на объединенные входы соответственно оптимальных фильтров ОФ1j их первой матрицы-строки и объединенные входы оптимальных фильтров ОФ2j их второй матрицы-строки, функционирующих в соответствии с процедурой (1)-(6) при тех же априорных данных, принятых при фильтрации в каждом ОФ1j и ОФ2j соответствующих их матриц-строк относительно j-го варианта динамики его полета в виде соответствующих динамических моделей, что и при обучении нейронных сетей для различных j-x вариантов динамики полета целей, для каждого оптимального фильтра ОФ1j и ОФ2j соответствующей матрицы-строки за K тактов их работы производится вычисление соответствующих оценок  в соответствии с выражениями
в соответствии с выражениями
по вычисленным оценкам  поступающими параллельно на соответствующие j-e входы соответствующих нейронных сетей, осуществляется принятие решения о характере полета каждого самолета пары, при этом архитектура каждой нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из первого входного слоя нейронной сети, на j-e входы которого последовательно подаются соответствующие значения
поступающими параллельно на соответствующие j-e входы соответствующих нейронных сетей, осуществляется принятие решения о характере полета каждого самолета пары, при этом архитектура каждой нейронной сети представляет собой многослойную нейронную сеть прямого распространения, состоящую из первого входного слоя нейронной сети, на j-e входы которого последовательно подаются соответствующие значения  - при обучении нейронных сетей и оценки
- при обучении нейронных сетей и оценки  - при принятии решения о характере полета каждого самолета группы, второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации, третьего выходного слоя сети, на j-x выходах которого формируются соответствующие оценки значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары, максимальные значения которых на выходе каждой нейронной сети будут соответствовать результирующей оценке вероятности правильного распознавания характера полета соответствующего самолета из состава их пары по принципу «стационарный полет - маневр в составе пары - маневр составом пары».
- при принятии решения о характере полета каждого самолета группы, второго скрытого слоя нейронной сети в виде слоя с нелинейной функцией активации, третьего выходного слоя сети, на j-x выходах которого формируются соответствующие оценки значений вероятностей распознавания j-го варианта полета каждого самолета из состава их пары, максимальные значения которых на выходе каждой нейронной сети будут соответствовать результирующей оценке вероятности правильного распознавания характера полета соответствующего самолета из состава их пары по принципу «стационарный полет - маневр в составе пары - маневр составом пары».
| Способ обработки льняного луба | 1960 |
|
SU137988A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ | 2006 |
|
RU2324952C1 |
| Способ распознавания функционального назначения летательных аппаратов пары по принципу "ведущий-ведомый" | 2019 |
|
RU2726869C1 |
| СПОСОБ ПОМЕХОЗАЩИЩЕННОГО ОБНАРУЖЕНИЯ МАНЕВРА ВОЗДУШНОЙ ЦЕЛИ | 2008 |
|
RU2403590C2 |
| БОГДАНОВ А.В., ФИЛОНОВ А.А., ЧИСТИЛИН А.Ю., ПАВЛОВ В.И., ИБРАГИМ А.К | |||
| Методика построения динамических моделей радиальных скоростей и ускорений пары воздушных целей, летящих в сомкнутом боевом порядке, с учетом их маневра в паре и составом | |||

