Изобретение относится к области радиотехники и представляет собой дальномер высокой точности.
Высотомеры малых высот, построенные по схеме измерения частоты биений, сигналов с частотной модуляцией - зондирующего и отраженного, отличаются простой технической реализацией, однако обладают существенным недостатком - так называемой «дискретной ошибкой», определяемой девиацией частоты модуляции Δω и носящей методологический характер.
За прототип берется типовая структура ЧМ-дальномера [1], блок-схема которой представлена на фиг.1 и состоит из следующих блоков: частотный модулятор 1, генератор несущей 2, смеситель 3, фильтр низких частот 4, блок измерения частоты (усредняющий счетчик) 5, передающая антенна 6, приемная антенна 7.
Определение дальности до цели при использовании частотной модуляции основано на приращении частоты передатчика за время прохождения сигнала до цели и обратно. Работа ЧМ-дальномера осуществляется следующим образом:
При отражении сигнала x1(t)=A1cos[Ф(t)] от поверхности, до которой измеряется расстояние, в приемник поступит сигнал с задержкой фазы на величину τ=2R/c: x2(t)=A2cos[Ф(t-τ)]. Сигнал с генератора 2 через передающую антенну 7 излучается в пространство, а также попадает на вход смесителя 3. На выходе смесителя 3 будет получен сигнал:
z(t,τ)=Acos[Ф(t)-Ф(t-τ)]+Acos[Ф(t)+Ф(t-τ)];
прохождение сигнала через фильтр 4 выделит низкочастотный сигнал биений:

где  - полная фаза колебания,
- полная фаза колебания,
a  - закон изменения несущей частоты,
- закон изменения несущей частоты,
на практике используются различные виды периодической модуляции частоты, например симметричный и несимметричный пилообразные законы или синусоидальные, ключевыми характеристиками модуляциями являются закон модуляции φ(t), девиация частоты (полоса качания) Δf и период модуляции TM [1].
Для малых высот (несколько десятков метров) разность фаз пропорциональна дальности:

При высотах до 100 м величина τ составляет порядка 10-7 сек и такое приближение является достаточно точным, то есть сигнал биений определен следующим выражением:

Как известно [1], дальность до цели связана с частотой сигнала биений следующим соотношением:

В то же время частота биений (по методу усредняющего счета) будет равна подсчитанному числу переходов через ноль совершенных сигналом биений за период модуляции:

Тогда выражение для дальности имеет вид:

Таким образом, дальность будет точно измеряться лишь на конкретных расстояниях, в остальных случаях, будет иметь место так называемая дискретная ошибка, ее значение можно получить как минимально измеряемую дальность [1] (N=1):

По мнению авторов, наличие ошибки, значение которой определяется только шириной спектра зондирующего сигнала, является существенным недостатком, так как нельзя неограниченно расширять полосу, занимаемую излучаемым сигналом. Типовые значения «полосы качания» на данный момент не превосходят 500 МГц, что соответствует методической ошибке измерения дальности ΔR=15 см. Как следствие, возникает необходимость использовать дополнительные методы «сглаживания ошибки дискретности».
Существует способ сглаживания ошибки дискретности, основанный на весовом спектральном анализе [2]. Сущность способа заключается в следующем:
Спектр сигнала биений вычисляется с помощью дискретного преобразования Фурье (ДПФ):

где w(k) - оконная функция, используемая для снижения уровня боковых лепестков спектра.
Для определения частоты дальности производится средневзвешенная спектральная оценка:
Полученный номер гармоники ncp используется для расчета расстояния.
Здесь n1 и n2 - соответственно нижний и верхний номера обрабатываемых дискретных частот. В общем случае n1=0, n2=N/2, однако большей точности можно достигнуть если выбирать n1 и n2 исходя из значения предполагаемой дальности, так как в этом случае можно ограничить влияния боковых лепестков спектра сигнала, наличие которых уменьшает точность оценки, также это влияние уменьшается правильным выбором весовой функции.
Дальномеры, в которых частота дальности измеряется как центр тяжести спектра «взвешенного» периода сигнала биений, отличаются высокой точностью измерения расстояний, однако подобные устройства обладают общим существенным недостатком, заключающимся в том, что значения частоты дальности определяется не непрерывно, а через определенные интервалы времени, зависящие от длительности периода сигнала биений, а также от скорости вычисления спектра данного сигнала и его средневзвешенной оценки.
В основе же предлагаемого изобретения лежит метод измерения центра тяжести спектра, основанный на использовании «Способа оценки средней частоты широкополосных доплеровских сигналов», возможности которого позволяют устранить этот недостаток.
Этот способ [3] позволяет найти частоту сигнала, соответствующую центру тяжести спектра к концу интервала наблюдения по отсчетам сигнала биений во временной области, причем без непосредственного вычисления спектра сигнала. Выражение для средней частоты при этом составит:
где D1/2x(t) - дробная производная сигнала порядка 1/2;
x(t) - обрабатываемый сигнал;
T - интервал наблюдения.
В дискретном виде оценка средней частоты выглядит следующим образом:
где xi - отсчеты сигнала x(t), а yi - отсчеты его дробной производной порядка 1/2.
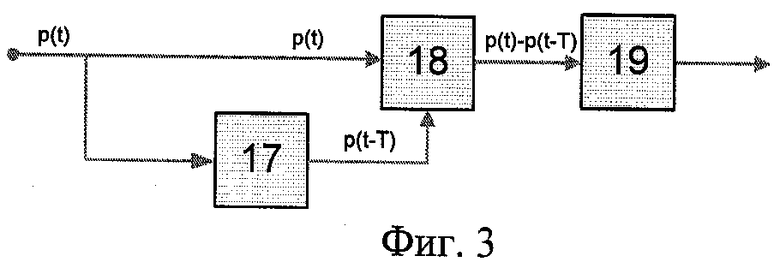
При этом операция дробного дифференцирования выполняется с помощью цифрового фильтра на основе аппроксимации дробных операторов, в результате чего значение частоты дальности можно обновлять непрерывно в случае аналоговой реализации или с каждым новым отсчетом при цифровой, что выгодно отличает устройство от рассмотренного выше аналога. Погрешность оценки частоты в этом случае зависит от погрешности аппроксимации дробно-дифференцирующих операторов. Предлагаемое изобретение представлено блок-схемой на фиг.2 и содержит частотный модулятор 1, генератор несущей 2, смеситель 3, передающую антенну 4, приемную антенну 5, фильтр низких частот 6, генератор весовой функции 7, смеситель 8, дробно-дифференцирующий фильтр порядка одна вторая 9, линию задержки 10, квадратичный преобразователь 11, квадратичный преобразователь 12, схему движущегося окна 13, фиг.3, схему движущегося окна 14, фиг.3, преобразователь вида А/В 15, индикатор 16, линию задержки на период сигнала биений 17, схему вычитания 18, индикатор 19.
Работа данной структуры вплоть до измерения частоты дальности полностью совпадает с принципами работы типовой структуры ЧМ-дальномера, представленной на фиг.1. Начиная же с фильтра низких частот, данная структура работает следующим образом: генератор 7, синхронизированный с модулятором 1, непрерывно генерирует сигнал периодической весовой функции w(t). Сигнал попадает на вход смесителя 8 и перемножается с сигналом биений s(t), результирующий сигнал x(t) попадает на вход дробно-диффернцирующего фильтра 9 и линии задержки 10, в результате формируются сигналы y1(t) и x1(t). Данные сигналы подаются на входы квадратичных преобразователей 11 и 12, выходные сигналы которых представляет собой  и
и  , данные сигналы попадают на схемы движущегося окна 13 и 14, отклик которых представляет собой интегралы от значений сигналов y2(t) и x2(t) на временном отрезке [t-T, t], где t - текущий момент времени, а T - период сигнала биений, отклики 13 и 14 попадают на входы преобразователя вида А/В 17; выходом этого элемента будет оценка центра тяжести спектра одного периода сигнала биений. Индикатор отображает полученную дальность.
, данные сигналы попадают на схемы движущегося окна 13 и 14, отклик которых представляет собой интегралы от значений сигналов y2(t) и x2(t) на временном отрезке [t-T, t], где t - текущий момент времени, а T - период сигнала биений, отклики 13 и 14 попадают на входы преобразователя вида А/В 17; выходом этого элемента будет оценка центра тяжести спектра одного периода сигнала биений. Индикатор отображает полученную дальность.
Источники информации
1. Филькенштейн М.И. Основы радиолокации - Москва, Радио и связь. - 1983 г.
2. Атаянц Б.А., Паршин B.C. Измерение частоты гармонического сигнала, принимаемого на фоне аддитивного белого шума, по его короткой реализации // Измерительная техника. - 2004. - №6. С.42. (прототип).
3. Патент 2114440 РФ, МКИ G01F 23/284. Способ оценки средней частоты широкополосных доплеровских сигналов. / В.Д.Захарченко №97114261/28; Заявл. 20.08.97; Опубл. 10.02.98, Бюл. №18 (II).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ЧМ-ДАЛЬНОМЕРА МАСШТАБИРОВАНИЕМ ФАЗЫ СИГНАЛА БИЕНИЙ | 2010 |
|
RU2426070C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2486540C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| Радиолокационная станция для мониторинга ледовой обстановки | 2018 |
|
RU2699766C1 |
| Интерферометрический гомодинный радиолокатор | 2018 |
|
RU2689397C1 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2016 |
|
RU2625567C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ РАССТОЯНИЯ | 2012 |
|
RU2535927C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОФИЗИЧЕСКИХ ПАРАМЕТРОВ ЗОНДИРУЕМОГО МАТЕРИАЛА И РАССТОЯНИЯ ДО НЕГО (ВАРИАНТЫ), УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ КАЛИБРОВКИ ЭТОГО УСТРОЙСТВА | 2003 |
|
RU2234688C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И РАДИОДАЛЬНОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩИХ РАДИОВОЛН | 2010 |
|
RU2434242C1 |
ЧМ-дальномер непрерывного слежения с дробно-дифференцирующим фильтром. Изобретение относится к области радиотехники и представляет собой дальномер высокой точности. Техническим результатом является способность ЧМ-дальномера с высокой точностью измерять расстояние, при этом измерение дальности должно проводиться непрерывно в течение наблюдения, без задержки на обработку. Поставленная цель достигается тем, что блок измерения частоты дальности содержит в себе смеситель, соединенный входами с фильтром низких частот и с генератором сигнала весовой функции, который в свою очередь подключен к модулятору, при этом смеситель также подключен выходом к дробно-дифференцирующему фильтру порядка одна вторая и к компенсационной линии задержки, причем фильтр и линия задержки соединены своими выходами со входами соответствующих квадратичных преобразователей, выходы которых соединены со входами соответственных схем движущегося окна, отклик которых подается на входы преобразователя вида А/В, выход которого соединен с индикатором. 3 ил.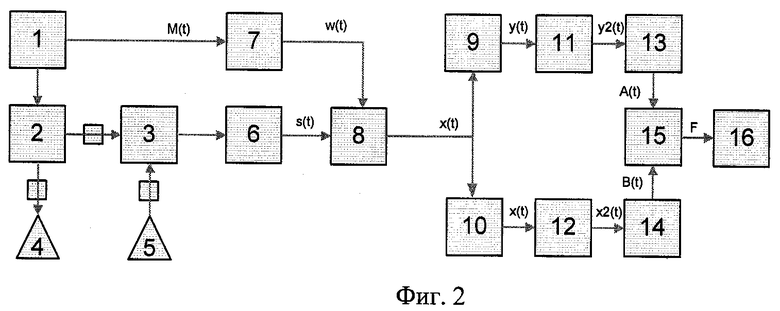
ЧМ-дальномер непрерывного слежения, состоящий из частотного модулятора, генератора несущей, смесителя, фильтра низких частот, блока измерения частоты, передающей и приемной антенны, отличающийся тем, что блок измерения частоты дальности содержит в себе смеситель, соединенный входами с фильтром низких частот и с генератором сигнала весовой функции, который в свою очередь подключен к модулятору, при этом смеситель также подключен выходом ко входу дробно-дифференцирующего фильтра порядка одна вторая и к компенсационной линии задержки, причем фильтр и линия задержки соединены своими выходами со входами соответствующих квадратичных преобразователей, выходы которых соединены со входами соответственных схем движущегося окна, а их выходы подключены к входам преобразователя вида А/В, выход которого соединен с индикатором.
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| РАДИОЛОКАТОР | 2000 |
|
RU2178185C2 |
| DE 3808972 A1, 05.10.1989 | |||
| Переносной станок для обработки наружных поверхностей вращения деталей | 1983 |
|
SU1115866A1 |

