Объектом настоящего изобретения является линейный приводной механизм, содержащий шариковый винт, позволяющий преобразовать вращательное движение в поступательное движение.
Настоящее изобретение относится к области производства механических линейных приводных механизмов и, более конкретно, механизмов, сконструированных для приведения в действие под влиянием импульса от электродвигателя (электромеханический приводной механизм).
Уже известен электромеханический приводной механизм, позволяющий преодолеть недостатки гидравлических и пневматических приводных механизмов, которые обычно состоят из силовых цилиндров, требующих внешних источников текучей среды, а также являются сложными в управлении и недостаточно точными.
Такой электромеханический приводной механизм, как правило, имеет систему шариковый винт/гайка, а также электродвигатель, сконструированный для приведения указанной гайки во вращение, при этом вращение вызывает поступательное движение винта.
В частности, документ ЕР-1,523,630 раскрывает электромеханический приводной механизм, содержащий внешний цилиндрический корпус, с внутренней стороны которого выполнена, по меньшей мере, одна винтовая дорожка качения, предназначенная для направления шариков, которые содержит этот приводной механизм, и придания этому внешнему цилиндрическому корпусу структуры винта.
Этот приводной механизм также содержит внутренний цилиндрический корпус, который выполнен с возможностью поступательного движения внутри внешнего цилиндрического корпуса и имеет внутри электродвигатель для приведения во вращение вала, имеющего одну ось с двумя цилиндрическими корпусами.
Приводной механизм также содержит гайку, которая выполнена с возможностью поступательного движения и вращения внутри цилиндрического корпуса и установлена без возможности вращения на указанном валу для того, чтобы она могла приводиться во вращение последним под действием импульса от двигателя. Эта гайка имеет, с одной стороны, винтовой канал качения, который проходит вокруг этой гайки и содержит два конца, и, с другой стороны, зону рециркуляции, соединяющую два конца этого канала качения. Фактически такая гайка состоит из множества выстроенных в линию элементов, которые имеют цилиндрическую форму и каждый из которых имеет, по меньшей мере, одну скошенную кромку. Скошенные кромки двух размещенных друг за другом элементов определяют канал качения для шариков приводного механизма.
Эта предпочтительная конструкция такого приводного механизма позволяет получить преимущество от диаметра циркуляции центра шариков, который больше, чем диаметр обычных приводных механизмов, и использовать шарики, диаметр которых также больше. Это способствует значительному снижению напряжения Герца, приложенного этими шариками к разным участкам дорожки качения для одинакового приводящего усилия, по сравнению с напряжением, приложенным в случае стандартного приводного механизма. В результате внешний цилиндрический корпус подвергается во время обычной работы приводного механизма уменьшенным напряжениям, что преимущественно позволяет изготавливать такой корпус из пластика, в частности, посредством литья.
Однако такой приводной механизм имеет недостатки, поскольку он подвержен статическим напряжениям, которые выше, чем динамические напряжения, приложенные во время приведения в действие обычным приводным механизмом и обусловленные, в частности, воздействием, которому подвергается этот приводной механизм. В результате под воздействием такой статической нагрузки шарики с большей нагрузкой давят на дорожку качения и повреждают ее.
Целью настоящего изобретения является преодоление недостатков приводных механизмов, известных из уровня техники.
Для этого изобретение относится к линейному приводному механизму, содержащему:
- внешний цилиндрический корпус, проходящий вдоль оси и содержащий с внутренней стороны, по меньшей мере, одну винтовую дорожку качения;
- внутренний цилиндрический корпус, который может совершать поступательное движение внутри внешнего цилиндрического корпуса, соосного с ним, и который вмещает внутри двигатель для приведения во вращение вала, который имеет общую ось с цилиндрическими корпусами;
- по меньшей мере, одну гайку, которая установлена на этом валу и может совершать вращательное и поступательное движение внутри внешнего цилиндрического корпуса и содержит, с одной стороны, по меньшей мере, один винтовой канал качения, который проходит вокруг этой гайки и содержит два конца, и, с другой стороны, зону рециркуляции, соединяющую два конца указанного канала качения;
- шарики, расположенные между каналом качения, по меньшей мере, одной гайки и дорожкой качения внешнего цилиндрического корпуса и в зоне рециркуляции такой гайки.
В соответствии с изобретением этот приводной механизм содержит:
- по меньшей мере, один опорный механизм, который, с одной стороны, состоит из опоры в целом цилиндрической формы, выполненной как одно целое, прикрепленной к валу и содержащей, по меньшей мере, одну винтовую резьбу, проходящую вокруг этой опоры, и, с другой стороны, сконструирован так, чтобы опираться на дорожку качения внешнего цилиндрического корпуса вдоль, по меньшей мере, одной линии контакта;
- по меньшей мере, одно устройство управления для этого опорного механизма, причем это устройство управления содержит, с одной стороны, механизм для установки гайки или гаек на вал без возможности вращения и с возможностью совершения поступательного движения и, с другой стороны, в осевом направлении и на каждой стороне такой гайки, по меньшей мере, один механизм для приложения предварительного напряжения на такую гайку, при этом это устройство управления сконструировано, с одной стороны, для удержания такого опорного механизма в нерабочем опорном положении, в котором существует зазор между этим опорным механизмом и дорожкой качения, и, с другой стороны, для приведения опорного механизма в рабочее опорное положение на дорожке качения, что происходит под воздействием приложенного к приводному механизму осевого напряжения, большего, чем пороговое напряжение.
Дополнительное отличие относится к тому, что механизм для приложения предварительного напряжения состоит из эластичного элемента, сжатого с соответствующей стороны пороговым напряжением.
Наконец, еще одно отличие заключается в том, что гайка или гайки этого приводного механизма имеют, по меньшей мере, два кулачка:
- в целом цилиндрической формы;
- выровненные в осевом направлении;
- и каждый из которых содержит, по меньшей мере, одну скошенную кромку, изготовленную для определения винтового канала качения вокруг этой гайки, и механически обработанный участок, изготовленный для определения зоны рециркуляции для шариков.
Приводной механизм в соответствии с настоящим изобретением содержит механизм, сконструированный так, чтобы опираться на дорожку качения внешнего цилиндрического корпуса и выполнять это вдоль, по меньшей мере, одной линии контакта. Опора этого типа преимущественно позволяет распределить нагрузки, воздействующие на эту дорожку качения в соответствии с линией контакта, и больше не ограничивает приложение этих нагрузок индивидуальными зонами, соответствующими точки контакта шарика с этой дорожкой качения.
Другое преимущество заключается в том, что приводной механизм содержит устройство управления, которое обеспечивает удержание этого опорного механизма в нерабочем положении, в котором этот опорный механизм не опирается на дорожку качения, и, таким образом, не препятствует приведению в действие, в то время когда этот приводной механизм находится в состоянии покоя, и в качестве части нормальной работы приводного механизма, а также когда к этому приводному механизму приложено осевое напряжение ниже порогового напряжения.
Напротив, устройство управления сконструировано для приведения опорного механизма в рабочее положение опоры на дорожку качения, только когда к этому приводному механизму приложено осевое напряжение выше порогового значения. Такая нагрузка соответствует, например, статической нагрузке, приложенной на приводной механизм и возникающей, в частности, от воздействия, которому был подвержен этот приводной механизм, посредством подвижного элемента, приведенного в действие этим приводным механизмом или посредством неподвижного элемента, связанного с этим приводным механизмом.
Другое преимущество заключается в том, что этот опорный механизм и это устройство управления состоят из элементов, которые имеют несложную конструкцию и просты в обслуживании, в частности с точки зрения их установки, проверки или замены.
Другие цели и преимущества настоящего изобретения будут очевидны из последующего описания на основании вариантов осуществления, которые приведены только лишь в качестве иллюстративных примеров и не несут ограничения.
Понимание настоящего описание будет облегчено посредством ссылок на прилагаемые графические материалы, на которых:
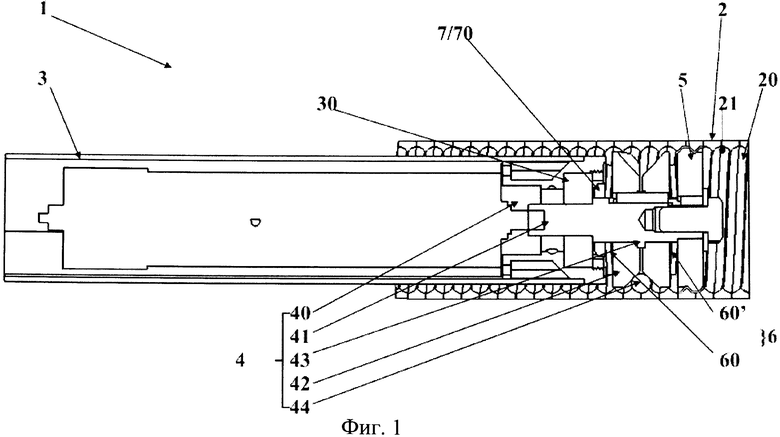
- Фигура 1 представляет собой общий вид и поперечное сечение приводного механизма в соответствии с настоящим изобретением;
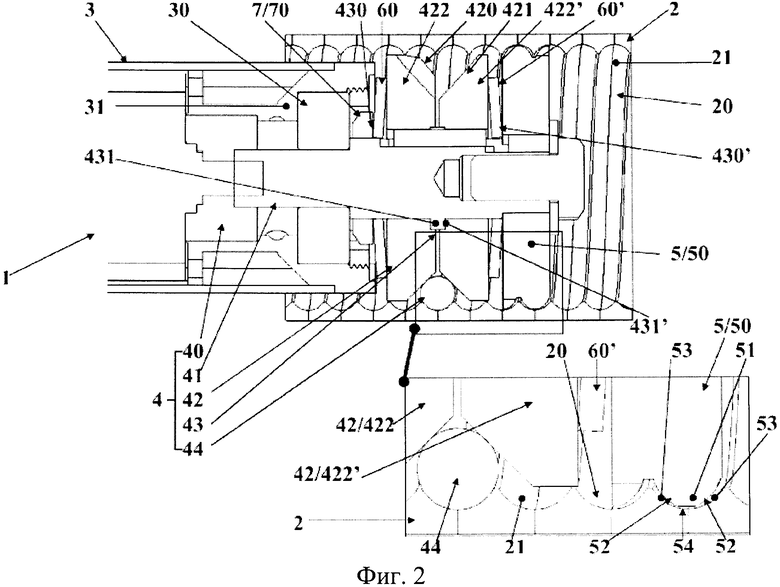
- Фигура 2 представляет собой схематическое подробное изображение приводного механизма, изображенного на фигуре 1, и изображение гайки, опорного механизма и первого варианта осуществления устройства управления, при этом опорный механизм находится в нерабочем опорном положении;
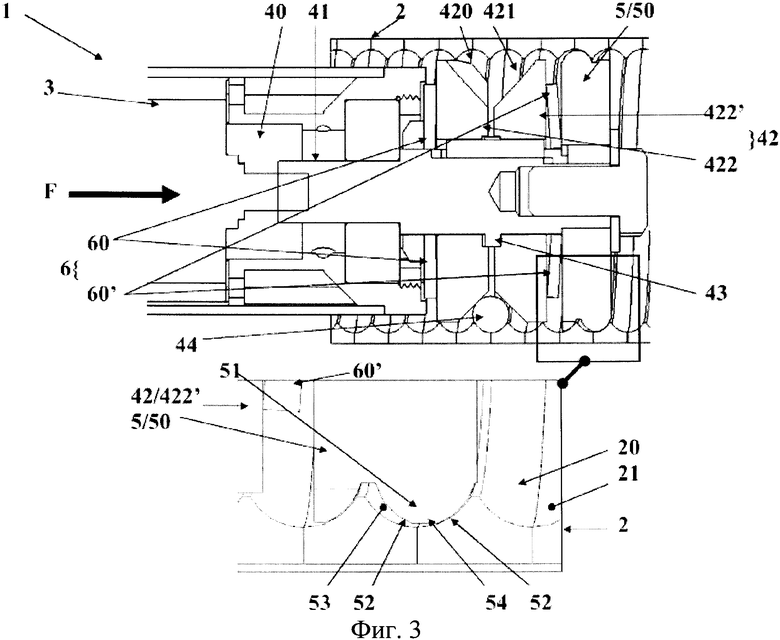
- Фигура 3 представляет собой изображение, которое является аналогом предыдущему и соответствует устройству управления и опорному механизму, принимающим рабочее опорное положение опорного механизма;
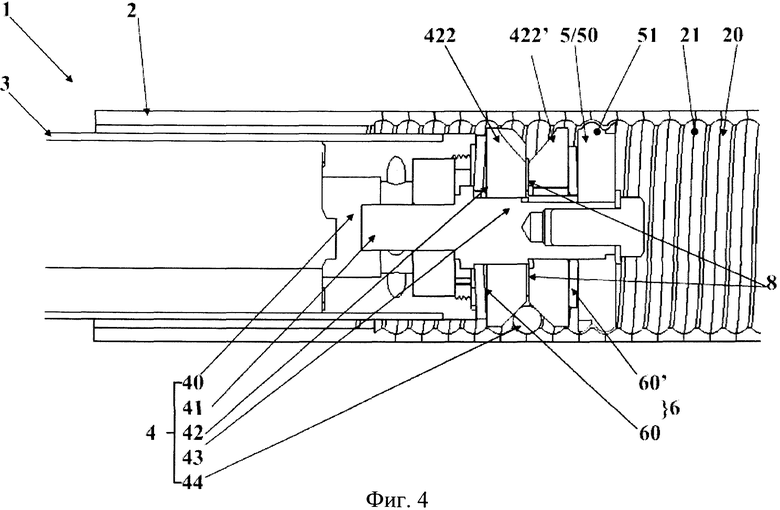
- Фигура 4 представляет собой схематическое подробное изображение приводного механизма и изображение гайки, опорного механизма и второго варианта осуществления устройства управления, при этом опорный механизм находится в нерабочем опорном положении;
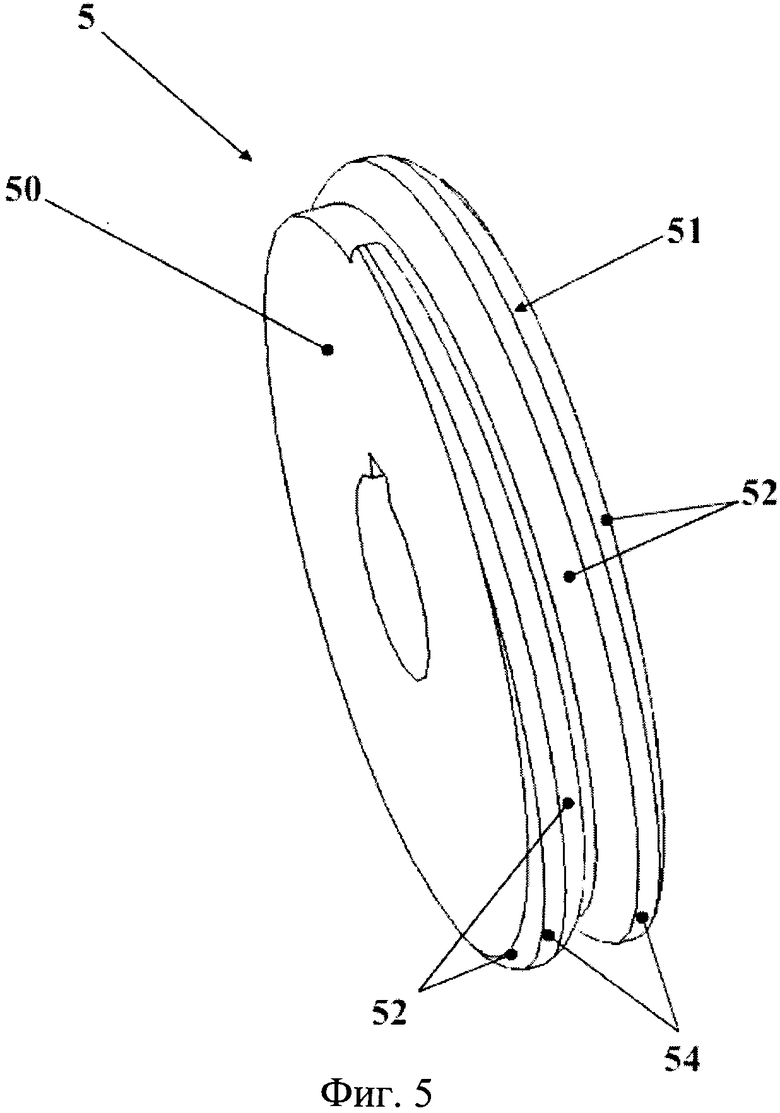
- Фигура 5 представляет собой схематическое подробное изображение опорного механизма в соответствии с изобретением.
Настоящее изобретение относится к области производства механических линейных приводных механизмов, которые содержат шариковый винт, позволяющий преобразовывать вращательное движение в поступательное движение.
Такой приводной механизм 1 содержит внешний цилиндрический корпус 2, проходящий вдоль оси и содержащий с внутренней стороны, по меньшей мере, одну винтовую дорожку качения 20, расположенную на внутренней стенке 21 указанного внешнего цилиндрического корпуса 2.
Фактически такая дорожка качения 20 может быть изготовлена посредством деформации этой внутренней стенки 21 или посредством литья в процессе изготовления цилиндрического корпуса 2. Другой вариант осуществления заключается в том, что эта дорожка качения 20 может быть задана посредством, по меньшей мере, одной винтовой резьбы (в частности, выполненной из высокопрочной стали), размещенной внутри внешнего цилиндрического корпуса 2 вплотную к внутренней стенке 21 корпуса 2.
Этот приводной механизм 1 также содержит внутренний цилиндрический корпус 3, при этом он тоже проходит вдоль оси, которая предпочтительно соответствует оси внешнего цилиндрического корпуса 2, так что эти цилиндрические корпуса (2; 3) имеют общую ось.
Фактически указанный внутренний цилиндрический корпус 3 проходит, по меньшей мере, частично, внутри внешнего цилиндрического корпуса 2. Приводной механизм 1 сконструирован таким образом, что эти цилиндрические корпуса (2; 3) установлены без возможности вращения, но могут двигаться поступательно, так, чтобы позволить внутреннему цилиндрическому корпусу 3 скользить относительно внешнего цилиндрического корпуса 2 и внутри корпуса 2, причем это происходит в продольном направлении этих цилиндрических корпусов (2; 3).
Приводной механизм 1 также содержит механизм 4, сконструированный для приведения в скольжение этих цилиндрических корпусов (2; 3) один 2 относительно другого 3.
Такой приводной механизм 4 содержит, с одной стороны, электродвигатель 40 со статором, который неподвижно установлен внутри внутреннего цилиндрического корпуса 3.
С другой стороны, этот приводной механизм 4 содержит приводной вал 41, вращающийся совместно с ротором электродвигателя 40 (прямо или через редуктор) для приведения его во вращение и проходящий по оси, предпочтительно соответствующей оси цилиндрических корпусов (2; 3).
Этот приводной вал 41 проходит, по меньшей мере частично, внутри внутреннего цилиндрического корпуса 3, в котором он направляется посредством, по меньшей мере, одного подшипника 30, в частности шарикового подшипника, который установлен внутри внутреннего цилиндрического корпуса 3, при этом внутреннее кольцо установлено без возможности вращения на валу 41, в то время как внешнее кольцо установлено без возможности вращения внутри внутреннего цилиндрического корпуса 3, в частности на внутренней стенке 31 последнего 3.
Как можно видеть на прилагаемых фигурах, этот приводной вал 41 также проходит за пределы этого внутреннего цилиндрического корпуса 3, а также внутри внешнего цилиндрического корпуса 2 приводного механизма 1.
Приводной механизм 4 также содержит, по меньшей мере, одну гайку 42, которая содержит, с одной стороны, по меньшей мере, один винтовой канал качения 420, который проходит вокруг этой гайки 42 и содержит два конца, и, с другой стороны, зону рециркуляции 421, соединяющую два конца указанного канала качения 420.
Кроме того, этот приводной механизм 4 содержит механизм 43 для установки такой гайки 42 на приводной вал 41 для закрепления без возможности вращения. Этот установочный механизм 43 далее позволит такой гайке 42 быть установленной так, чтобы иметь возможность вращаться и перемещаться поступательно внутри внешнего цилиндрического корпуса 2.
Наконец, этот приводной механизм 4 содержит множество шариков 44, расположенных между винтовым каналом качения 420, по меньшей мере, одной гайки 42 и дорожкой качения 20 внешнего цилиндрического корпуса 2 и в зоне рециркуляции 421 этой гайки 42.
Этот приводной механизм 4 сконструирован так, что электродвигатель 40 приводит во вращение приводной вал 41, который в свою очередь приводит во вращение, по меньшей мере, одну гайку 42. Такая гайка 42 под действием вращения приводит в движение шарики 44, которые перемещаются внутри винтового канала качения 420 этой гайки 42, а также внутри дорожки качения 20 внешнего цилиндрического корпуса 2, что вызывает скольжение внутреннего цилиндрического корпуса 3 относительно указанного внешнего цилиндрического корпуса 2.
В соответствии с изобретением этот приводной механизм 1 содержит, по меньшей мере, один механизм 5, связанный с валом 41 и сконструированный так, чтобы опираться на дорожку качения 20 внешнего цилиндрического корпуса 2 вдоль, по меньшей мере, одной линии контакта.
В связи с этим и как можно видеть на прилагаемых фигурах, этот опорный механизм 5 имеет форму в целом цилиндрической опоры 50, которая проходит вдоль оси, предпочтительно соответствующей оси цилиндрических корпусов (2; 3).
Такая опора 50 выполнена как одно целое и прикреплена (без возможности вращения и поступательного движения) к приводному валу 41, в частности к свободному концу этого вала 41, противоположному концу, взаимодействующему с электродвигателем 40.
Еще один отличительный признак этой опоры 50 заключается в том, что она содержит, по меньшей мере, одну винтовую резьбу 51, которая проходит вокруг этой опоры 50, в частности по кромке этой опоры 50.
Эта винтовая резьба 51 имеет шаг, который в целом равен шагу винтовой дорожки качения 20 внешнего цилиндрического корпуса 2.
Как можно видеть на прилагаемых фигурах, эта винтовая резьба 51 имеет профиль, который в значительной степени повторяет в целом полукруглую форму с радиусом, практически равным радиусу шариков 44.
Более точно, эта винтовая резьба 51 фактически имеет профиль, который повторяет форму двух дуг окружности 52, центры которых предпочтительно смещены относительно друг друга и радиусы которых в целом соответствуют радиусу шариков 44.
В связи с этим следует отметить, что центры окружностей этих двух дуг окружности 52 смещены по оси, более конкретно относительно оси, параллельной оси внешнего цилиндрического корпуса 2 и/или проходящей через центр шарика 44, перемещающегося по дорожке качения 20 этого внешнего цилиндрического корпуса 2.
Фактически смещение между центрами окружностей двух дуг окружности 52 в целом соответствует боковому зазору 53, определенному между резьбой 51 опоры 50 и дорожкой качения 20 внешнего цилиндрического корпуса 2.
Более конкретно, те части резьбы 51 опоры 50, которые ограничены двумя дугами окружности 52, могут опираться на дорожку качения 20 внешнего цилиндрического корпуса 2 (более конкретно, на стороны этой дорожки 20) и выполняют это вдоль, по меньшей мере, одной линии контакта.
В связи с этим следует отметить, что эта дорожка качения 20 имеет профиль, который повторяет форму полуокружности с радиусом, который в целом соответствует радиусу шариков 44, которые перемещаются по дорожке 20. Профиль этой дорожки качения 20, таким образом, также соответствует профилю двух дуг окружности 52 винтовой резьбы 51 опоры 50 так, что эта опора 50 может опираться на эту дорожку качения 20 вдоль линии контакта, имеющей некоторую ширину и которая фактически, более конкретно, является похожей на контактную полосу с шириной, которая в целом соответствует длине такой дуги окружности 52.
Другой отличительный признак винтовой резьбы 51 опоры 50 заключается в том, что вершина 54 этой резьбы 51 содержит, по меньшей мере, одну усеченную часть для того, чтобы предотвратить контакт этой вершины 54 с дорожкой качения 20 (более конкретно, с основанием дорожки качения 20) внешнего цилиндрического корпуса 2.
Что касается давления опорного механизма 5 на дорожку качения 20 внешнего цилиндрического корпуса 2, это фактически является результатом внешнего напряжения, воздействующего на приводной механизм 1 (в частности на внешний цилиндрический корпус 2 и/или на внутренний цилиндрический корпус 3 этого приводного механизма 1). Такое внешнее напряжение соответствует случайному напряжению (отличному от напряжения, воздействующего на этот приводной механизм 1 в качестве части его обычной работы по приведению в действие), состоящему более конкретно из статического напряжения, которое, в частности, является результатом нагрузки, которой подвергается этот приводной механизм 1.
В связи с этим следует отметить, что такое внешнее напряжение имеет осевую составляющую F, которая проходит в соответствии с осью прохождения цилиндрических корпусов (2; 3) и приводного вала 41.
В соответствии с изобретением приводной механизм 1 также содержит, по меньшей мере, одно устройство 6 для управления указанным выше опорным механизмом 5.
Это устройство управления 6 сконструировано с возможностью воздействия на такой опорный механизм 5 для принятия им рабочего положения опоры на дорожке качения 20 (вдоль, по меньшей мере, одной линии контакта, как описано выше), что происходит под воздействием приложенного к приводному механизму 1 осевого напряжения F, большего, чем пороговое напряжение Fs (фигура 3).
Это устройство управления 6 также сконструировано для удержания такого опорного механизма 5 в нерабочем опорном положении, в котором существует зазор 53 (на каждой стороне резьбы 51) между этим опорным механизмом 5 и дорожкой качения 20, что происходит в отсутствии любой нагрузки или при условии, если значение осевого напряжения F меньше, чем значение указанного порогового напряжения Fs (Фигуры 2 и 4).
Как указано выше, приводной механизм 4 содержит механизм 43 для установки, по меньшей мере, одной гайки 42 на приводной вал 41.
Фактически и в соответствии с конкретным отличительным признаком настоящего изобретения устройство управления 6 опорного механизма 5 состоит, по меньшей мере частично, из этого установочного механизма 43, который в соответствии с изобретением сконструирован так, чтобы обеспечить установку гайки или гаек 42 на вал 41 без возможности вращения и с возможностью совершения поступательного движения.
В связи с этим следует отметить, что, для того чтобы выполнить такой тип установки, этот установочный механизм 43 содержит, например, по меньшей мере один ключ, сконструированный так, чтобы взаимодействовать с канавкой, выполненной, по меньшей мере, на гайке 42 или также на валу 41, а также на опорном механизме 5 (фигура 5).
Другой отличительный признак заключается в том, что такой механизм 43 для установки гайки 42 содержит боковые стопоры (430, 430'), между которыми установлена с возможностью поступательного перемещения указанная гайка 42.
Фактически и как можно видеть на прилагаемых фигурах, по меньшей мере, один такой боковой стопор 430 может состоять из выступа, связанного с приводным валом 41. Такой выступ может быть определен возле корпуса вала 41 или, альтернативно, возле фиксирующей гайки 70 (более подробно описана ниже), установленной в осевом направлении на этом валу 41.
Более того, один из этих боковых стопоров 430' может состоять из указанного выше опорного механизма 5.
Предпочтительный вариант осуществления изобретения показан на прилагаемых фигурах, где соответствующий приводной механизм 1 содержит одиночную гайку 42, установленную на валу 41 с возможностью осуществлять поступательное движение между двумя боковыми стопорами (430, 430'). Кроме того, в этом варианте осуществления один 430' из этих боковых стопоров состоит из опорного механизма 5, при этом другой 430 состоит из гайки 7, связанной с валом 41.
Дополнительный признак изобретения заключается в том, что устройство управления 6 также содержит на каждой стороне, по меньшей мере, одной гайки 42, по меньшей мере, один механизм (60; 60') для приложения предварительного напряжения к такой гайке 42.
Фактически такой механизм предварительного напряжения (60; 60') установлен в осевом направлении и, более конкретно, в соответствии с осью внешнего цилиндрического корпуса 2 и внутреннего цилиндрического корпуса 3 относительно приводного вала 41.
В соответствии с вариантом осуществления изобретения, изображенным на прилагаемых фигурах, такой механизм (60; 60') для приложения предварительного напряжения расположен между боковым стопором (430; 430') и гайкой 42 приводного механизма 1. Более конкретно такой механизм предварительного напряжения (60; 60') опирается на указанный боковой стопор (430; 430') и на указанную гайку 42 и выполняет это для того, чтобы приложить указанное предварительное напряжение к указанной гайке 42.
Фактически предпочтительный вариант осуществления заключается в том, что механизм 60 для приложения предварительного напряжения состоит из эластичного элемента, сжатого напряжением, соответствующим пороговому напряжению Fs.
Такой эластичный элемент может состоять из пружины (более конкретно, винтовой пружины) или даже из (и предпочтительно) тарельчатой шайбы.
Таким образом, когда напряжение, приложенное к приводному механизму 1, меньше, чем пороговое напряжение Fs, вал 41 и гайка 42 занимают нерабочее опорное положение (Фигуры 2 и 4).
Однако, когда напряжение, приложенное к приводному механизму 1, превышает пороговое напряжение Fs, вал 41 будет немного смещаться относительно гайки 42, опирающейся на шарики 44, до тех пор пока избыточное напряжение (относительно порогового напряжения Fs) не сожмет механизм предварительного напряжения 60 на значение зазора 53 между опорным механизмом 5 и дорожкой качения 20.
Затем опорный механизм 5 упирается в дорожку качения 20, которая принимает усилие (фигура 3). Этот рабочий контакт происходит вдоль, по меньшей мере, одной линии контакта, представляющей собой область поверхности контакта, которая значительно больше, чем область точек контакта шариков 44 с дорожкой качения 20.
Более того, на эти шарики 44 действует только усилие, ограниченное пороговым напряжением Fs, с добавлением приращения усилия, необходимого для обеспечения перемещения вала 41 для того, чтобы опорный механизм 5 опирался на дорожку качения 20. Давление Герца, возникающее в точках контакта между шариками 44 и дорожкой качения 20, таким образом ограничено, в частности, по сравнению с давлением, приложенным опорным механизмом 5 на эту дорожку качения 20.
Большая часть напряжения, которое действует на приводной механизм 1, таким образом, приложена, по меньшей мере, на линии контакта между опорным механизмом 5 и дорожкой качения 20, что позволяет осуществить лучшее распределение этого напряжения в приводном механизме 1 (по сравнению с аналогичным напряжением, приложенным только через точки контакта, как в случае приводных механизмов, известных из уровня техники) и, следовательно, позволяет ограничить (или даже предотвратить) повреждение, которое может возникнуть в этом приводном механизме 1 в результате такого напряжения.
Дополнительный признак заключается в том, что приводной механизм 1 в соответствии с изобретением содержит механизм 7 для регулировки предварительного напряжения, приложенного механизмом предварительного напряжения (60; 60'), по меньшей мере, к одной гайке 42. Такой регулировочный механизм 7 содержит фиксирующую гайку 70, связанную с приводным валом 41 (в частности, установлена в осевом направлении на валу 41) и определяющую выступ, который образует указанный выше боковой стопор 430 и опирается на такой механизм предварительного напряжения 60.
Другой отличительный признак изобретения заключается в том, что гайка или гайки 42 приводного механизма 4 имеют особенности, которые были более подробно описаны в документе ЕР-1,523,630.
Фактически такая гайка 42 содержит, по меньшей мере, два кулачка (422, 422'), которые принимают в целом цилиндрическую форму и каждый из которых проходит вдоль оси, которая предпочтительно соответствует оси цилиндрического корпуса(2; 3).
Как можно видеть на прилагаемых фигурах, эти кулачки (422, 422') выровнены в осевом направлении с указанной осью и расположены один 422 против другого 422'.
Каждый из этих кулачков (422; 422') содержит, по меньшей мере, одну скошенную кромку, имеющую подходящую форму и изготовленную для определения винтового канала качения 420 вокруг гайки 42, образованного этими кулачками (420; 420').
Также каждый из кулачков (422; 422') имеет механически обработанный участок, выполненный для определения зоны рециркуляции 421 для шариков 44.
Отдельный вариант осуществления заключается в том, что гайка 42 приводного механизма 1 содержит фактически два кулачка (422; 422'), имеющих симметричную или даже (и предпочтительно) идентичную конструкцию.
Дополнительный признак изобретения заключается в том, что приводной механизм 1 (более конкретно, его установочный механизм 43) имеет несколько ограничительных стопоров (431; 431'), каждый из которых связан с кулачком (422; 422') гайки 42. Более конкретно, указанный кулачок (422; 422') удерживается в рабочем контакте механизмом (60; 60') для приложения предварительного напряжения по отношению к указанному ограничительному стопору (431; 431').
Таким образом, фигуры 1-3 показывают первый вариант осуществления изобретения (который более конкретно представляет собой симметрическое решение), где такой ограничительный стопор (431; 431') состоит из выступа, который определен на корпусе вала 41 и по отношению которого кулачок (422; 422') удерживается в рабочем контакте.
Фактически такое удержание обеспечивается для осевого напряжения, приложенного к механизму предварительного напряжения (60; 60'), связанному с кулачком (422; 422'), которое меньше или равно пороговому напряжению Fs. В частности и как может быть видно на фигурах 1 и 2, такое удержание обеспечивается, когда отсутствует напряжение, приложенное к такому механизму предварительного напряжения (60; 60').
Как можно видеть на прилагаемых фигурах 1-3, ограничительные стопоры (431; 431'), связанные с кулачками (422; 422') одной гайки 42, расположены между двумя кулачками (422; 422') этой гайки 42 или даже состоят из одного элемента (более конкретно, состоят из радиальной канавки), в котором определены два выступа, формирующие такие ограничительные стопоры (431; 431').
Фигура 4 показывает второй вариант осуществления (который более конкретно представляет собой дифференциальное решение), в котором ограничительный стопор (431; 431'), связанный с кулачком (422; 422') гайки 42, фактически состоит из другого кулачка (422'; 422), который содержит эта гайка 42 и по отношению которого (422'; 422) этот кулачок (422; 422') удерживается в рабочем контакте.
И здесь такое удержание обеспечивается для осевого напряжения, приложенного к механизму предварительного напряжения (60; 60'), связанному с кулачком (422; 422'), которое меньше или равно пороговому напряжению Fs. В частности и как может быть видно на фигуре 4, такое удержание обеспечивается, когда отсутствует напряжение, приложенное к такому механизму предварительного напряжения (60; 60').
Фактически каждый кулачок (422; 422') одной гайки 42 может упираться на другой кулачок (422'; 422) этой гайки 42, что происходит непосредственно или опосредованно.
В связи с этим и как можно видеть на фигуре 4, приводной механизм 1 в соответствии с изобретением может иметь помещенный между двумя кулачками (422; 422') одной гайки 42 промежуточный элемент 8, на который опираются каждый из этих двух кулачков (422; 422'), в частности, в ответ на импульс от механизма (60; 60') для приложения предварительного напряжения к этой гайке 42, и это приводит к тому, что один такой кулачок (422; 422') опосредованно опирается на другой (422'; 422).
Дополнительный признак изобретения заключается в том, что приводной механизм 1 также содержит механизм 8 для регулирования предварительного напряжения, приложенного этими кулачками (422; 422') к шарикам 44.
Фактически такой регулировочный механизм 8 более конкретно сконструирован для того, чтобы прикладывать основное предварительное напряжение к этим шарикам 42 через эти кулачки (422; 422').
Предпочтительный вариант осуществления заключается в том, что этот регулировочный механизм 8 расположен между двумя кулачками (422; 422') одной гайки и более конкретно состоит из указанного выше промежуточного элемента 8.
В соответствии с предпочтительным вариантом осуществления, этот регулировочный механизм 8 может состоять из шайбы, расположенной на приводном валу 41.
В частности, этот регулировочный механизм 8 может преимущественно быть сконструированным так, чтобы прикладывать одинаковое предварительное напряжение к шарикам 42 и выполнять это равномерно даже в случае износа. Для этого этот регулировочный механизм 8 может быть упругого типа и, таким образом, состоять из упругой шайбы.
Наконец, как часть этого второго варианта осуществления (дифференциального решения) и как можно видеть на фигуре 4, приводной вал 41, на котором расположены кулачки (422; 422'), по меньшей мере, одной гайки 42, предпочтительно является валом ступенчатого типа.
Кроме того, приводной вал 41 этого типа преимущественно позволяет выполнять легкую установку (и снятие) различных элементов, которые составляют приводной механизм 4, опорный механизм 5 и устройство управления 6, на внутреннем цилиндрическом корпусе 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115810C1 |
| Исполнительный механизмМЕХАНичЕСКОгО ТОРМОзА | 1978 |
|
SU799678A3 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2021 |
|
RU2836068C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2211344C1 |
| ПРИВОД С ПАССИВНОЙ БЛОКИРОВКОЙ | 2017 |
|
RU2714658C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2182241C2 |
| ПАТРОН ДЛЯ ЗАЖИМА ИНСТРУМЕНТА С ВОЗМОЖНОСТЬЮ ЕГО ОСВОБОЖДЕНИЯ | 1996 |
|
RU2125506C1 |
| УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ УПОРЯДОЧЕННОГО ДВИЖЕНИЯ СТОЛОВ-СПУТНИКОВ САМОХОДНОГО ТИПА | 1992 |
|
RU2080236C1 |
| ПЕРЕДАЧА И ПРИВОД ВСПОМОГАТЕЛЬНЫХ АГРЕГАТОВ С ПОСТОЯННОЙ СКОРОСТЬЮ | 2004 |
|
RU2315216C9 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ ШИН | 2020 |
|
RU2819633C1 |
Изобретение относится к линейному приводному механизму. Механизм содержит внешний цилиндрический корпус с внутренней винтовой дорожкой качения, внутренний цилиндрический корпус, приводной механизм, опорный механизм и устройство управления. Приводной механизм включает приводной вал с электродвигателем, гайку и механизм установки для гайки. Приводной механизм обеспечивает скольжение упомянутых цилиндрических корпусов друг относительно друга. Гайка установлена на приводном валу и совершает вращательное и поступательное движение внутри внешнего корпуса и содержит, с одной стороны, винтовой канал качения, проходящий вокруг гайки, а с другой стороны - зону рециркуляции. В зоне рециркуляции между каналом качения гайки и дорожкой качения расположены шарики. Опорный механизм состоит из опоры, связанной с валом, и опирается на дорожку качения, при этом вокруг опоры проходит винтовая резьба. Устройство управления для опорного механизма содержит механизм для приложения предварительного напряжения к гайке. Устройство управления сконструировано для удержания опорного механизма в нерабочем и рабочем положениях. В нерабочем положении существует зазор между опорным механизмом и дорожкой качения. Принятие рабочего положения на дорожке качения происходит под воздействием приложенного к приводному механизму осевого напряжения, большего, чем пороговое напряжение. Технический результат - повышение долговечности устройства. 13 з.п. ф-лы, 5 ил.
1. Линейный приводной механизм (1), содержащий:
- внешний цилиндрический корпус (2), проходящий вдоль оси и содержащий с внутренней стороны, по меньшей мере, одну винтовую дорожку качения (20);
- внутренний цилиндрический корпус (3), который может совершать поступательное движение внутри внешнего цилиндрического корпуса (2) на одной оси с корпусом (2) и который вмещает внутри двигатель (40) для приведения во вращение вала (41), который имеет общую ось с цилиндрическими корпусами (2; 3);
- по меньшей мере, одну гайку (42), которая установлена на этом валу (41) и может совершать вращательное и поступательное движение внутри внешнего цилиндрического корпуса (2), и содержит, с одной стороны, по меньшей мере, один винтовой канал качения (420), который проходит вокруг этой гайки (42) и содержит два конца, и, с другой стороны, зону рециркуляции (421), соединяющую два конца указанного канала качения (420);
- шарики (44), расположенные между каналом качения (420), по меньшей мере, одной гайки (42) и дорожкой качения (20) внешнего цилиндрического корпуса (2) и в зоне рециркуляции (421) такой гайки (42),
отличающийся тем, что приводной механизм (1) содержит:
- по меньшей мере, один опорный механизм (5), который, с одной стороны, состоит из опоры (50) в целом цилиндрической формы, выполненной как одно целое и прикрепленной к валу (41), и содержащей, по меньшей мере, одну винтовую резьбу (51), проходящую вокруг этой опоры (50), и, с другой стороны, сконструирован так, чтобы опираться на дорожку качения (20) внешнего цилиндрического корпуса (2) вдоль, по меньшей мере, одной линии контакта;
- по меньшей мере, одно устройство управления (6) для этого опорного механизма (5), причем это устройство управления (6) содержит, с одной стороны, механизм (43) для установки гайки или гаек (42) на вал (41) без возможности вращения и с возможностью совершения поступательного движения и, с другой стороны, в осевом направлении и на каждой стороне такой гайки (42), по меньшей мере, один механизм (60; 60') для приложения предварительного напряжения к такой гайке (42), при этом это устройство управления (6) сконструировано, с одной стороны, для удержания такого опорного механизма (5) в нерабочем опорном положении, в котором существует зазор (53) между этим опорным механизмом (5) и дорожкой качения (20), и, с другой стороны, для приведения опорного механизма (5) в рабочее опорное положение на дорожке качения (20), что происходит под воздействием приложенного к приводному механизму (1) осевого напряжения (F), большего, чем пороговое напряжение (Fs).
2. Линейный приводной механизм (1) по п.1, отличающийся тем, что винтовая резьба (51) имеет шаг, который в целом равен шагу винтовой дорожки качения (20) внешнего цилиндрического корпуса (2).
3. Линейный приводной механизм (1) по п.1, отличающийся тем, что винтовая резьба (51) имеет профиль, который в значительной степени повторяет в целом полукруглую форму (52) с радиусом, практически равным радиусу шариков (44).
4. Линейный приводной механизм (1) по п.1, отличающийся тем, что винтовая резьба (51) имеет профиль, который повторяет форму двух дуг окружности (52), центры которых смещены относительно друг друга и радиусы которых в целом соответствуют радиусам шариков (44).
5. Линейный приводной механизм по п.4, отличающийся тем, что смещение между центрами окружностей двух дуг окружностей (52) в целом соответствует боковому зазору (53) между резьбой (51) опоры (50) и дорожкой качения (20) внешнего цилиндрического корпуса (2).
6. Линейный приводной механизм (1) по любому из предыдущих пунктов, отличающийся тем, что вершина (54) резьбы (51) имеет, по меньшей мере, одну усеченную часть для того, чтобы предотвратить контакт этой вершины (54) с дорожкой качения (20) внешнего цилиндрического корпуса (2).
7. Линейный приводной механизм (1) по п.1, отличающийся тем, что механизм (43) для установки гайки (42) имеет боковые стопоры (430, 430'), между которыми установлена с возможностью поступательного перемещения указанная гайка (42), и тем, что механизм (60; 60') для приложения предварительного напряжения расположен между таким боковым стопором (430; 430') и гайкой (42).
8. Линейный приводной механизм (1) по п.1, отличающийся тем, что механизм (60; 60') для приложения предварительного напряжения состоит из эластичного элемента, сжатого напряжением, соответствующим пороговому напряжению (Fs).
9. Линейный приводной механизм (1) по п.1, отличающийся тем, что гайка или гайки (42) имеют, по меньшей мере, два кулачка (422; 422') в целом цилиндрической формы, выровненные в осевом направлении, и каждый из которых содержит, по меньшей мере, одну скошенную кромку, изготовленную для определения винтового канала качения (420) вокруг этой гайки (42), и механически обработанный участок, изготовленный для определения зоны рециркуляции (421) для шариков (44).
10. Линейный приводной механизм (1) по п.9, отличающийся тем, что приводной механизм (1) имеет множество ограничительных стопоров (431; 431'), каждый из которых связан с кулачком (422; 422') гайки (42), и тем, что каждый кулачок (422; 422') удерживается в рабочем контакте по отношению к такому ограничительному стопору (431; 431') механизмом (60; 60') для приложения предварительного напряжения.
11. Линейный приводной механизм (1) по п.10, отличающийся тем, что ограничительный стопор (431; 431') состоит из выступа, который выполнен на корпусе вала (41) и в отношении которого кулачок (422; 422') удерживается в рабочем контакте, что происходит вследствие осевого напряжения, приложенного к механизму предварительного напряжения (60; 60'), связанному с этим кулачком (422; 422'), которое меньше или равно пороговому напряжению (Fs).
12. Линейный приводной механизм (1) по п.10, отличающийся тем, что ограничительный стопор (431; 431'), связанный с кулачком (422; 422') гайки (42), состоит из другого кулачка (422'; 422), который содержит эта гайка (42) и по отношению которого (422'; 422) этот кулачок (422; 422') удерживается в рабочем контакте, что происходит вследствие осевого напряжения, приложенного к механизму предварительного напряжения (60; 60'), связанному с этим кулачком (422; 422'), которое меньше или равно пороговому напряжению (Fs).
13. Линейный приводной механизм (1) по п.12, отличающийся тем, что приводной механизм (1) содержит помещенный между двумя кулачками (422; 422') одной гайки (42) механизм (8) для регулирования предварительного напряжения, приложенного этими кулачками (422; 422') к шарикам (44).
14. Линейный приводной механизм (1) по одному из пп. 12 и 13, отличающийся тем, что вал (41), на котором расположены кулачки (422; 422'), по меньшей мере, одной гайки (42), является валом ступенчатого типа.
| Устройство для очистки труб круглого сечения | 2020 |
|
RU2756609C1 |
| US 2005268736 A1, 08.12.2005 | |||
| Самотормозящий шариковинтовой механизм | 1978 |
|
SU724852A1 |
| СПОСОБ ВЫПОЛНЕНИЯ АНТИФРИКЦИОННЫХ НАПЛАВОК | 2009 |
|
RU2427455C2 |

