Изобретение относится к способам стрельбы управляемыми ракетами и может быть использовано в системах наведения (СН) с телеориентацией ракеты в луче лазера.
Одной из задач, решаемых при разработке СН управляемых ракет, является повышение точности их наведения.
Известны способы стрельбы управляемыми ракетами, использующие метод наведения «по трем точкам» (Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М.: «Высшая школа», 1976, с.220), при котором ракета в процессе полета находится на линии, соединяющей пусковое устройство и цель, т.е. на линии визирования цели (ЛВЦ).
В ряде известных способов используется принцип телеориентации управляемой ракеты в лазерном луче, информационная ось которого совмещена с ЛВЦ (Патент США 5427328, НКИ 244-3.13, 12.02.85; Патент ФРГ 4137843, МКИ F41G 1/38, 19.05.93). Недостатком этих способов является:
ухудшение видимости цели и низкая помехозащищенность линии связи вследствие влияния дыма двигателя ракеты на процесс сопровождения цели и наведения ракеты;
высокая вероятность обнаружения комплекса вследствие того, что в процессе полета ракеты центр луча направлен на цель.
Указанных недостатков лишен способ, при котором стрельба производится с отклонением оси луча относительно ЛВЦ (с превышением над ЛВЦ) и их совмещением перед подлетом к цели (Патент RU 2126946, МКИ6 F41G 7/26, 25.11.97). Программное изменение фокусного расстояния в оптической системе (прицеле), реализующей этот способ, обеспечивает постоянство линейного размера луча и величины превышения на всех дальностях полета ракеты, начиная с момента начала изменения фокусного расстояния (начала сужения луча). До этого момента луч и превышение имеют постоянный начальный угловой размер, а их линейные размеры увеличиваются пропорционально полетной дальности.
Согласно этому способу стрельба в режиме с превышением может осуществляться на дальность не менее некоторого значения Dmin, которое определяется временем подъема ракеты на превышение и спуском с него. Перед запуском ракеты в электронной схеме прицела производится сравнение измеренной дальности до цели Dц с хранящимся в памяти значением дальности Dmin, допускающей введение превышения. При Dц>Dmin стрельба производится в режиме с превышением, а при Dц<Dmin - без превышения. Кроме того, в электронной схеме прицела устанавливается время начала снятия превышения в соответствии с измеренной дальностью до цели Dц.
В этом способе и реализующем его прицеле подъем превышения на максимальную величину производится перед запуском ракеты, т.е. в момент выстрела луч поднят вверх на максимальную величину.
Для обеспечения положительных качеств указанного способа величина превышения должна быть не менее высоты цели (высота объектов бронетанковой техники обычно составляет 2,0-2,5 м). Как правило, величина превышения устанавливается 3,0…5,0 м.
Радиус лазерного луча Rл (или его половинный размер при квадратном сечении) выбирается из условий:
обеспечения нахождения ракеты в луче в процессе полета;
обеспечения требуемых энергетических запасов СН на всех дальностях полета ракеты для повышения точности наведения,
т.е. луч должен быть, с одной стороны, достаточно широким, а с другой - достаточно узким (Динамическое проектирование систем управления автоматических маневренных летательных аппаратов; под редакцией Е.А.Федосова. М.: «Машиностроение», 1997, с.271). Обычно радиус лазерного луча составляет 1,5…3,0 м, например, в ПТРК «MAPATS», Израиль и «Red Arrow 9», Китай (Высокоточное оружие зарубежных стран. Том 1. ПТРК: обзорно-аналитический справочник. КБП, ГУП, Тула: «Бедретдинов и Ко», 2008, с.275, 278, 320), т.е. он меньше величины превышения.
Очевидно, что для обеспечения встреливания ракеты в луч соответственно указанному способу (с подъемом превышения на максимальную величину перед запуском ракеты) на носителе должна быть реализована установка двух разных углов пуска между осью ракеты и осью луча в момент запуска ракеты для двух указанных режимов стрельбы: с превышением и без превышения. Такая реализация возможна при наличии привода наведения пусковой направляющей (или ствола орудия, из которого производится запуск), на который поступает электрический сигнал с переключателя режима стрельбы для установки одного из двух значений угла пуска.
Недостатком такого способа является невозможность обеспечения двух режимов стрельбы в случае жесткой конструкции пускового устройства (например, малогабаритной переносной установки), где не предусмотрена возможность изменения угла пуска в зависимости от режима стрельбы.
С одной стороны, стрельба с единым углом пуска в двух режимах не обеспечивает встреливание ракеты в луч в одном из них. С другой стороны, работа только в режиме с превышением на все дальности увеличивает ближнюю дальность стрельбы (так называемую «мертвую зону» комплекса), поскольку стрельба на дальность менее Dmin при этом не обеспечивается.
Наиболее близким к предлагаемому является способ стрельбы ракетой, управляемой по лучу лазера, включающий измерение дальности до цели и ввод измеренного значения в наземную систему управления, установку начального превышения Y0 оси луча относительно линии визирования цели, запуск управляемой ракеты, подъем оси луча после запуска ракеты до максимального превышения Ymax относительно линии визирования цели, полет ракеты на максимальном превышении до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с линией визирования цели (Патент RU 2205347, МКИ7 F41G 7/00, 7/26, F42B 15/01, 30.05.2001).
Этот способ обеспечивает возможность стрельбы с единым углом пуска между осью ракеты и осью луча для двух режимов стрельбы: с превышением и без превышения.
Недостатком способа является низкая вероятность встреливания в луч ракет с низкой начальной скоростью (менее 100 м/с).
Встреливание в луч таких ракет характеризуется их большими отклонениями на участке переходного процесса вследствие влияния начальных возмущений по угловой скорости продольной оси ракеты, ветра, ускорения от действия силы тяжести и других факторов, а также значительной длительностью переходного процесса (выхода ракеты на ось луча).
Как известно, время переходного процесса tп в СН при ее аппроксимации апериодическим звеном первого порядка с постоянной времени Т определяется по зависимости (В.А.Бесекерский, Е.П.Попов. Теория систем автоматического регулирования. М.: «Наука», 1972, с.71):
tп=3T
или с учетом того, что 
Частота среза СН, в свою очередь, связана с аэродинамическими характеристиками ракеты и тем ниже, чем ниже ее скорость, что соответственно увеличивает длительность переходного процесса.
Поскольку согласно известному способу подъем оси луча до максимального превышения производится непосредственно после запуска ракеты, высока вероятность выхода ракеты из луча за его нижнюю границу в случае, если возмущающие факторы действуют в направлении отклонения ракеты вниз. Для ракет с низкой начальной скоростью это обусловлено ограничением максимальной команды вверх, что не позволяет осуществить требуемый маневр (подъем траектории).
Задачей предлагаемого изобретения является повышение точности стрельбы в режиме с превышением.
Поставленная задача решается за счет того, что по сравнению с известным способом стрельбы ракетой, управляемой по лучу лазера, включающим измерение дальности до цели и ввод измеренного значения в наземную систему управления, установку начального превышения Y0 оси луча относительно ЛВЦ, запуск управляемой ракеты, подъем оси луча до максимального превышения Ymax относительно ЛВЦ, полет ракеты на максимальном превышении до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с ЛВЦ, в предлагаемом способе в течение времени от момента запуска ракеты до момента 

где 
где Vп - максимально допустимая скорость подъема луча, м/с, превышение увеличивают до значения Ymax.
Изобретение поясняется следующим графическим материалом.
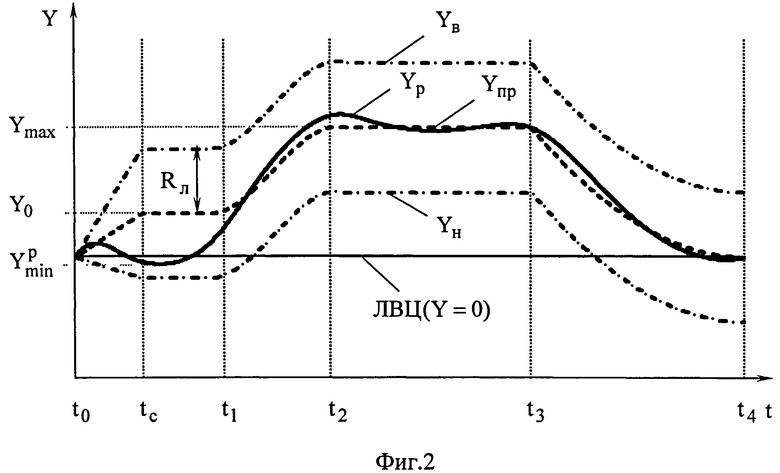
На фиг.1 представлена циклограмма работы СН в соответствии предлагаемым способом, где обозначено (помимо указанных выше обозначений):
tи - момент измерения дальности до цели;
t0 - момент запуска ракеты;
t3 - момент начала снятия превышения;
t4 - момент совмещения оси луча с ЛВЦ.
На фиг. 2 представлена траектория ракеты в вертикальной плоскости Yp с минимально возможным отклонением от ЛВЦ 
Yпр - величина превышения (т.е. положение оси луча);
Yв - верхняя граница луча;
Yн - нижняя граница луча;
tc - момент начала сужения луча.
Стрельба согласно предлагаемому способу осуществляется следующим образом (фиг.1). После измерения дальности до цели Dц в момент времени tи и ввода измеренного значения в наземную систему управления в ее электронной схеме определяется момент времени t3 аналогично известному способу. Затем устанавливается начальное превышение Y0 и производится запуск управляемой ракеты.
В течение времени от момента запуска ракеты t0 до момента t1 значение Y0 сохраняют неизменным. Время t1 соответствует окончанию переходного процесса в СН согласно зависимости (1), которое с учетом возможных разбросов параметров СН определяется как:
Например, для ракеты с низкой начальной скоростью частота среза СН может составлять 0,25 Гц (0,25·2π рад/с); при этом t1=1,6…2,2 с.
Выполнение условия (2) обеспечивает гарантированное нахождение ракеты в луче на участке переходного процесса (фиг.2). После его окончания производят подъем превышения до максимального значения Ymax с момента времени t1 до момента времени t2.
Минимально возможное время t2 обеспечивается по зависимости (3) при максимально допустимой скорости Vп подъема луча, которая устанавливается с учетом динамических свойств СН и конструктивных особенностей ее реализации в прицеле.
Снятие превышения производят аналогично известным способам.
Предлагаемый способ может быть реализован в СН, представленной в ближайшем аналоге (Патент RU 2205347, МКИ7 F41G 7/00, 7/26, F42B 15/01,30.05.2001).
Применение предлагаемого способа стрельбы ракетами, управляемыми по лучу лазера, позволяет повысить точность наведения на начальном участке полета при стрельбе в режиме с превышением за счет обеспечения постоянного начального превышения требуемой величины до окончания переходного процесса (выхода ракеты на ось луча).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стрельбы ракетой, управляемой по лучу лазера | 2018 |
|
RU2702458C1 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ, УПРАВЛЯЕМЫМ ПО ЛУЧУ ЛАЗЕРА, И ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ СНАРЯДА | 2015 |
|
RU2582308C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280232C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| Способ наведения управляемого снаряда, телеориентируемого в луче лазера (варианты) | 2015 |
|
RU2612054C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2406067C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
Изобретение относится к системам наведения ракет и может быть использовано в комплексах ПТУР и ЗУР. Способ стрельбы ракетой, управляемой по лучу лазера, включает измерение дальности до цели и ввод измеренного значения в наземную систему управления, установку начального превышения Y0 оси луча относительно линии визирования цели, запуск управляемой ракеты, подъем оси луча до максимального превышения Ymax относительно линии визирования цели, полет ракеты на максимальном превышении до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с линией визирования цели. При этом осуществляют последовательное изменение превышения: в течение времени от момента запуска ракеты до момента , где ωcp - частота среза системы управления ракетой, рад/с, начальное превышение Y0 сохраняют неизменным, причем его значение устанавливают по зависимости  , где
, где  - минимальное возможное значение вертикального отклонения ракеты от линии визирования на этом участке полета, м; Rл - радиус луча, м, а в течение времени от момента t1 до момента
- минимальное возможное значение вертикального отклонения ракеты от линии визирования на этом участке полета, м; Rл - радиус луча, м, а в течение времени от момента t1 до момента  , где Vп - максимально допустимая скорость подъема луча, м/с, превышение увеличивают до значения Ymax. Технический результат заключается в повышении точности стрельбы ракетой. 2 ил.
, где Vп - максимально допустимая скорость подъема луча, м/с, превышение увеличивают до значения Ymax. Технический результат заключается в повышении точности стрельбы ракетой. 2 ил.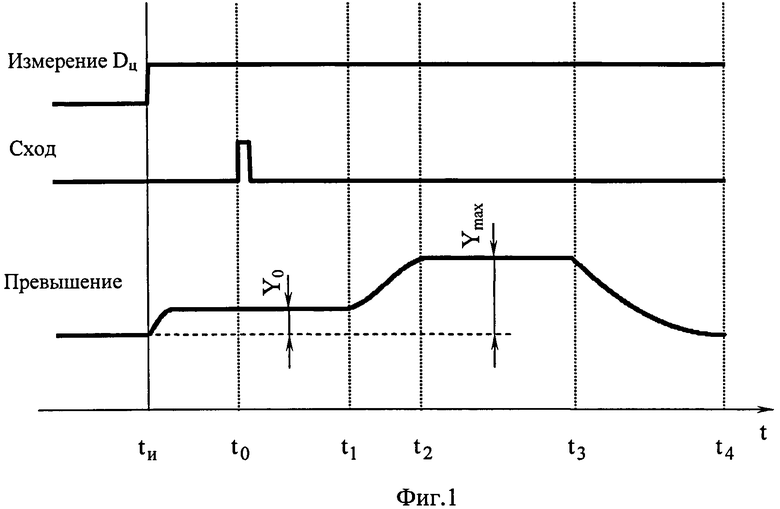
Способ стрельбы ракетой, управляемой по лучу лазера, включающий измерение дальности до цели и ввод измеренного значения в наземную систему управления, установку начального превышения Y0 оси луча относительно линии визирования цели, запуск управляемой ракеты, подъем оси луча до максимального превышения Ymax относительно линии визирования цели, полет ракеты на максимальном превышении до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с линией визирования цели, отличающийся тем, что в течение времени от момента запуска ракеты до момента , где ωcp - частота среза системы управления ракетой, рад/с, начальное превышение Y0 сохраняют неизменным, причем его значение устанавливают по зависимости
 ,
,
где  - минимальное возможное значение вертикального отклонения ракеты от линии визирования на этом участке полета, м;
- минимальное возможное значение вертикального отклонения ракеты от линии визирования на этом участке полета, м;
Rл - радиус луча, м,
а в течение времени от момента t1 до момента , где Vп - максимально допустимая скорость подъема луча, м/с, превышение увеличивают до значения Ymax.
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205347C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| СПОСОБ ПРОИЗВОДСТВА СПИЧЕК | 1925 |
|
SU13144A1 |
| Уплотнительное кольцо | 1941 |
|
SU66021A1 |
| US 7781709 B1, 24.08.2010 | |||

