Изобретение относится к способам наведения управляемых снарядов и может быть использовано в системах наведения (СН) с телеориентацией снаряда в луче лазера.
Одной из задач, решаемых при разработке СН управляемых снарядов, является повышение точности их наведения.
Известны способы, использующие метод наведения «по трем точкам» (Кузовков Н.Т. Системы стабилизации летательных аппаратов (баллистических и зенитных ракет). М.: «Высшая школа», 1976, с. 220), при которых снаряд в процессе полета находится на линии, соединяющей пусковое устройство и цель, т.е. на линии визирования цели (ЛВЦ).
В ряде известных способов используется принцип телеориентации управляемого снаряда в лазерном луче (например, патент RU 2126946, МКИ 6 F41G 7/26, 25.11.97; патент RU 2126522, МКИ 6 F41G 7/26, F42B 15/00, 25.11.97; патент RU 2205347, МКИ 6 F41G 7/26, F42B 15/01, 30.05.2001). В оптических системах (прицелах), реализующих эти способы, обеспечивается постоянство линейного размера луча посредством программного изменения фокусного расстояния на всех дальностях полета снаряда, начиная с некоторого момента начала изменения фокусного расстояния (начала сужения луча). До этого момента луч имеет постоянный начальный угловой размер, а линейный размер увеличивается пропорционально полетной дальности. Оптическая система с переменным фокусным расстоянием имеет также название «панкратический объектив».
Радиус лазерного луча RЛ, (или его половинный размер при квадратном сечении) выбирается из условий:
обеспечения нахождения снаряда в луче в процессе полета;
обеспечения требуемых энергетических запасов СН на всех дальностях полета снаряда для повышения точности наведения, т.е. луч должен быть, с одной стороны, достаточно широким, а с другой -достаточно узким (Динамическое проектирование систем управления автоматических маневренных летательных аппаратов; под редакцией Е.А. Федосова. М.: «Машиностроение», 1997, с. 271).
Радиус лазерного луча может составлять 1,5…3,0 м, например, в ПТРК «MAPATS», Израиль и «Red Arrow 9», Китай (Высокоточное оружие зарубежных стран. Том 1. ПТРК: обзорно-аналитический справочник. КБП, ГУП, Тула, «Бедретдинов и Ко», 2008, с. 275, 278, 320).
Естественно, что луч с меньшим радиусом обеспечивает больший энергетический запас и, как показывает опыт отработки СН подобного класса, луч с радиусом порядка 1,5 м является достаточным для уверенного нахождения в нем снаряда с учетом динамических ошибок, возникающих при сопровождении движущейся цели (например, со среднеквадратическим отклонением не более 0,2 мрад).
Однако на начальном участке наведения могут быть отклонения значительно большей величины, особенно для снарядов с низкой начальной скоростью. Так, в вертикальной плоскости рассеивание снарядов вызвано преимущественно начальными возмущениями, выражающимися в появлении угловой скорости разворота оси снаряда (по углу тангажа) при выходе из контейнера (или ствола орудия). Ускорение от действия силы тяжести, как правило, компенсируют соответствующей командой.
В горизонтальной плоскости помимо указанных возмущений (угловой скорости разворота оси снаряда по углу рыскания) действует боковой ветер. Кроме того, при стрельбе с движущегося носителя или (и) по движущейся цели на начальном участке появляются дополнительные динамические ошибки.
Влияние этих факторов в неблагоприятном сочетании может вызвать выход снаряда из луча при его недостаточном размере.
Существуют способы и устройства, в которых динамические ошибки уменьшают за счет формирования дополнительных команд управления от измеренных с помощью датчиков величин бокового ветра (в общем случае - воздушной скорости) и угловой скорости вращения ЛВЦ (например, патент RU 2260763 МКИ 6 F41G 7/26, 02.12.2003). Такие датчики, как правило, устанавливают на крупногабаритных носителях (танк, БМП, боевой вертолет), но на малогабаритных переносных пусковых установках их использование затруднительно.
Коэффициент передачи в луче во всех указанных способах (так называемая крутизна пеленгационной характеристики луча) определяется его размером RЛ и составляет  [единиц команд/м] или
[единиц команд/м] или  [В/м], где Umax - выходной сигнал блока выделения координат бортовой аппаратуры управления снаряда, соответствующий нахождению снаряда на границе луча. При этом линейная зона изменения координат снаряда в поле управления соответствует полному размеру луча.
[В/м], где Umax - выходной сигнал блока выделения координат бортовой аппаратуры управления снаряда, соответствующий нахождению снаряда на границе луча. При этом линейная зона изменения координат снаряда в поле управления соответствует полному размеру луча.
Наиболее близким к предлагаемому является способ наведения управляемого снаряда, телеориентируемого в луче лазера, включающий формирование модулированного оптического поля управления с помощью двух инжекционных лазеров, излучающие области которых расположены перпендикулярно осям двух измеряемых координат снаряда, обеспечение постоянного линейного размера поля RЛ на полетной дальности снаряда путем изменения фокусного расстояния панкратического объектива и коррекцию по времени коэффициента передачи в поле управления (Патент RU 2280224, МКИ 7 F41G 3/00, 7/26, 15.12.2004).
Отличительной особенностью такого способа является возможность коррекции коэффициента передачи в луче независимо от его размера.
Недостатком указанных способов является обеспечение постоянного линейного размера луча на всей дальности полета снаряда, что в ряде случае не является оптимальным.
Задачей предлагаемого изобретения является повышение точности стрельбы путем выбора рационального размера луча на всей дальности полета снаряда.
В первом варианте предлагаемого способа поставленная задача решается за счет того, что по сравнению с известным способом наведения управляемого снаряда, телеориентируемого в луче лазера, включающим формирование модулированного оптического поля управления с помощью двух инжекционных лазеров, излучающие области которых расположены перпендикулярно осям двух измеряемых координат снаряда, и обеспечение постоянного линейного размера поля RЛ на полетной дальности снаряда путем изменения фокусного расстояния панкратического объектива, новым является то, что в течение времени от момента запуска снаряда до момента , где ωср - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (1,8÷2,3)RЛ, а с момента времени t1 уменьшают его к моменту времени
, где ωср - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (1,8÷2,3)RЛ, а с момента времени t1 уменьшают его к моменту времени  до величины RЛ посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива.
до величины RЛ посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива.
Во втором варианте предлагаемого способа поставленная задача решается за счет того, что по сравнению с известным способом наведения управляемого снаряда, телеориентируемого в луче лазера, включающим формирование модулированного оптического поля управления с помощью двух инжекционных лазеров, излучающие области которых расположены перпендикулярно осям двух измеряемых координат снаряда, обеспечение постоянного линейного размера поля RЛ на полетной дальности снаряда путем изменения фокусного расстояния панкратического объектива и коррекцию по времени коэффициента передачи в поле управления, новым является то, что в течение времени от момента запуска снаряда до момента  , где ωcp - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (3,0÷4,0)RЛ, а с момента времени t1 уменьшают его к моменту времени
, где ωcp - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (3,0÷4,0)RЛ, а с момента времени t1 уменьшают его к моменту времени  до величины RЛ посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива, при этом коррекцию по времени коэффициента передачи в поле управления на участке полета снаряда до момента времени t2 производят различной по каждой из двух измеряемых координат.
до величины RЛ посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива, при этом коррекцию по времени коэффициента передачи в поле управления на участке полета снаряда до момента времени t2 производят различной по каждой из двух измеряемых координат.
Сущность предлагаемых способов заключается в увеличении размера луча до потребных значений на начальном участке наведения снаряда, т.е. в течение переходного процесса, когда отклонения достигают максимальных значений, и дальнейшем плавном уменьшении размера до значения, приемлемого для основного участка полета.
Изобретение поясняется следующим графическим материалом.
На фиг. 1 представлены размер луча по первому варианту способа (штриховой линией) и по второму варианту способа (сплошной линией).
На фиг. 2 приведены размер луча по второму способу (сплошной линией) и линейные зоны в вертикальной (штриховой линией) и в горизонтальной плоскости (штрихпунктирной линией).
Как известно, время переходного процесса tп в СН при ее аппроксимации апериодическим звеном первого порядка с постоянной времени Т определяется по зависимости (В.А. Бесекерский, Е.П. Попов. Теория систем автоматического регулирования. М.: «Наука», 1972, с. 71):
tП=3 T
или с учетом того, что  , где ωср - частота среза СН, рад/с,
, где ωср - частота среза СН, рад/с,

Частота среза СН, в свою очередь, связана с аэродинамическими характеристиками снаряда и тем ниже, чем ниже его скорость, что соответственно увеличивает длительность переходного процесса.
Время t1 для обоих вариантов соответствует окончанию переходного процесса в СН согласно зависимости (1), которое с учетом возможных разбросов параметров СН определяется как:

Например, для снаряда с низкой начальной скоростью частота среза СН может составлять 0,25 Гц (0,25⋅2π рад/с); при этом t1=1,6…2,2 с.
Значение момента времени t2 в обоих вариантах устанавливают по критерию плавности изменения размера луча и по первому варианту оно приблизительно равно удвоенному значению t1, а по второму варианту - несколько больше с учетом большего изменения размера луча.
Значение размера поля на участке переходного процесса (1,8÷2,3)RЛ по первому варианту (фиг. 1) является достаточным при наличии на борту носителя указанных выше датчиков воздушной скорости и угловой скорости вращения ЛВЦ и передаче на борт снаряда команд, соответствующих измеренным величинам. При RЛ=1,5 м этот размер составит (2,7÷3,5) м.
При отсутствии датчиков (на переносной пусковой установке) размер поля на участке переходного процесса целесообразно увеличивать для гарантированного удержания снаряда в луче и устанавливать его равным (3,0÷4,0)RЛ в соответствии со вторым вариантом способа (фиг. 2). Такое значение выбрано методом математического моделирования при задании бокового ветра 15 м/с (стандартное требование к комплексам данного класса) в неблагоприятном сочетании с другими факторами. При RЛ=1,5 м этот размер составит (4,5÷6,0) м.
Указанное увеличение размера поля приводит к соответствующему снижению коэффициента передачи в луче. Такое снижение по первому варианту допустимо без какой-либо коррекции коэффициента передачи.
Снижение коэффициента передачи в (3,0÷4,0) раза по второму варианту требует его коррекции, при этом целесообразно производить коррекцию различной (фиг. 2) по каждой из двух измеряемых координат (т.е. различной в вертикальной и горизонтальной плоскостях).
Например, при общем размере луча (3,0÷4,0)RЛ оптимальные отклонения в вертикальной плоскости могут быть получены при линейной зоне поля управления, равной (1,8÷2,3)RЛ. От границы этой зоны до границы луча реализуется максимальная команда (выходной сигнал блока выделения координат бортовой аппаратуры управления снаряда имеет максимальное значение Umax).
В горизонтальной плоскости целесообразно устанавливать размер линейной зоны больше, чем в вертикальной, но меньше, чем размер луча, например, как показано на фиг. 2. Такое решение связано с одновременным обеспечением невыхода снаряда из луча и минимизации длительности переходного процесса (ближней зоны поражения цели) в случае воздействия максимального бокового ветра.
Предлагаемые варианты способа могут быть реализованы в оптическом прицеле СН, представленном в ближайшем аналоге (Патент RU 2280224, МКИ 7 F41G 3/00, 7/26, 15.12.2004). Увеличение размера поля достигается замедлением изменения фокусного расстояния на участке до момента времени t2.
Применение предлагаемых вариантов способа позволяет повысить точность наведения снаряда на начальном участке полета при обеспечении требуемого энергетического потенциала лазерного луча на дальнейшем участке наведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ, УПРАВЛЯЕМЫМ ПО ЛУЧУ ЛАЗЕРА, И ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ СНАРЯДА | 2015 |
|
RU2582308C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2280224C1 |
| Способ стрельбы ракетой, управляемой по лучу лазера | 2018 |
|
RU2702458C1 |
| СПОСОБ СТРЕЛЬБЫ РАКЕТОЙ, УПРАВЛЯЕМОЙ ПО ЛУЧУ ЛАЗЕРА | 2012 |
|
RU2516383C1 |
| СПОСОБ ОДНОВРЕМЕННОГО НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМЫХ В ЛУЧЕ УПРАВЛЕНИЯ РАКЕТ (ВАРИАНТЫ) И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479818C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260764C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ И ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2228505C2 |
| СПОСОБ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ, ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2006 |
|
RU2313055C1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2260763C2 |
| Устройство формирования оптического поля для телеориентирования управляемых объектов | 2019 |
|
RU2704675C1 |
Изобретение относится к области авиационного приборостроения систем наведения управляемых снарядов и может быть использовано в системах наведения (СН) с телеориентацией снаряда в луче лазера. Технический результат – расширение функциональных возможностей на основе обеспечения рационального размера поля управления на всем участке полета снаряда: увеличение размера луча до потребных значений на начальном участке наведения снаряда, когда его отклонения достигают максимальных значений, и дальнейшее плавное уменьшение размера до значения, приемлемого для основного участка полета, с возможностью коррекции коэффициента передачи в поле управления, различного в вертикальном и горизонтальном каналах. Для этого по сравнению с известным способом наведения управляемого снаряда, телеориентируемого в луче лазера, включающим формирование модулированного оптического поля управления с помощью двух инжекционных лазеров, излучающие области которых расположены перпендикулярно осям двух измеряемых координат снаряда, и обеспечение постоянного линейного размера поля RЛ на полетной дальности снаряда путем изменения фокусного расстояния панкратического объектива, новым является то, что в первом варианте предлагаемого способа в течение времени от момента запуска снаряда до момента  , где ωср - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (1,8÷2,3)RЛ, а с момента времени t1 уменьшают его к моменту времени
, где ωср - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (1,8÷2,3)RЛ, а с момента времени t1 уменьшают его к моменту времени  до величины RЛ посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива. Во втором варианте - по сравнению с известным способом наведения управляемого снаряда, телеориентируемого в луче лазера, включающим формирование модулированного оптического поля управления с помощью двух инжекционных лазеров, излучающие области которых расположены перпендикулярно осям двух измеряемых координат снаряда, обеспечение постоянного линейного размера поля RЛ на полетной дальности снаряда путем изменения фокусного расстояния панкратического объектива и коррекцию по времени коэффициента передачи в поле управления, новым является то, что в течение времени от момента запуска снаряда до момента
до величины RЛ посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива. Во втором варианте - по сравнению с известным способом наведения управляемого снаряда, телеориентируемого в луче лазера, включающим формирование модулированного оптического поля управления с помощью двух инжекционных лазеров, излучающие области которых расположены перпендикулярно осям двух измеряемых координат снаряда, обеспечение постоянного линейного размера поля RЛ на полетной дальности снаряда путем изменения фокусного расстояния панкратического объектива и коррекцию по времени коэффициента передачи в поле управления, новым является то, что в течение времени от момента запуска снаряда до момента  , где ωср - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (3,0÷4,0)RЛ, а с момента времени t1 уменьшают его к моменту времени
, где ωср - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (3,0÷4,0)RЛ, а с момента времени t1 уменьшают его к моменту времени  до величины RЛ посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива, при этом коррекцию по времени коэффициента передачи в поле управления на участке полета снаряда до момента времени t2 производят различной по каждой из двух измеряемых координат. Применение предлагаемых вариантов способа позволяет повысить точность наведения снаряда на начальном участке полета при обеспечении требуемого энергетического потенциала лазерного луча на дальнейшем участке наведения. 2 н.п. ф-лы, 2 ил.
до величины RЛ посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива, при этом коррекцию по времени коэффициента передачи в поле управления на участке полета снаряда до момента времени t2 производят различной по каждой из двух измеряемых координат. Применение предлагаемых вариантов способа позволяет повысить точность наведения снаряда на начальном участке полета при обеспечении требуемого энергетического потенциала лазерного луча на дальнейшем участке наведения. 2 н.п. ф-лы, 2 ил.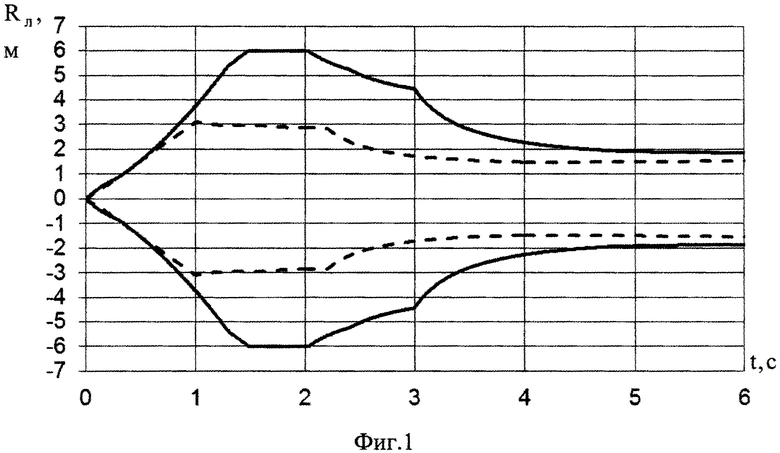
1. Способ наведения управляемого снаряда, телеориентируемого в луче лазера, включающий формирование модулированного оптического поля управления с помощью двух инжекционных лазеров, излучающие области которых расположены перпендикулярно осям двух измеряемых координат снаряда, и обеспечение постоянного линейного размера поля RЛ на полетной дальности снаряда путем изменения фокусного расстояния панкратического объектива, отличающийся тем, что в течение времени от момента запуска снаряда до момента  , где ωср - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (1,8÷2,3)Rл, а с момента времени t1 уменьшают его к моменту времени
, где ωср - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (1,8÷2,3)Rл, а с момента времени t1 уменьшают его к моменту времени  до величины Rл посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива.
до величины Rл посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива.
2. Способ наведения управляемого снаряда, телеориентируемого в луче лазера, включающий формирование модулированного оптического поля управления с помощью двух инжекционных лазеров, излучающие области которых расположены перпендикулярно осям двух измеряемых координат снаряда, обеспечение постоянного линейного размера поля Rл на полетной дальности снаряда путем изменения фокусного расстояния панкратического объектива и коррекцию по времени коэффициента передачи в поле управления, отличающийся тем, что в течение времени от момента запуска снаряда до момента , где ωср - частота среза системы управления снарядом, рад/с, увеличивают размер поля до величины (3,0÷4,0)Rл, а с момента времени t1 уменьшают его к моменту времени  до величины Rл посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива, при этом коррекцию по времени коэффициента передачи в поле управления на участке полета снаряда до момента времени t2 производят различной по каждой из двух измеряемых координат.
до величины Rл посредством дополнительного варьирования программы изменения фокусного расстояния панкратического объектива, при этом коррекцию по времени коэффициента передачи в поле управления на участке полета снаряда до момента времени t2 производят различной по каждой из двух измеряемых координат.
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМОЙ РАКЕТОЙ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2011 |
|
RU2468327C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| Кузовков Н.Т | |||
| Системы стабилизации летательных аппаратов (баллистических и зенитных ракет) | |||
| М., "Высшая школа", 1976, с | |||
| Ветряный много клапанный двигатель | 1921 |
|
SU220A1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| СПОСОБ КОРРЕКТИРОВАНИЯ ТРАЕКТОРИИ ПОЛЕТА УПРАВЛЯЕМОГО СНАРЯДА И СНАРЯД ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2509975C1 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ В ЛУЧЕ И СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2421680C2 |

