Изобретение относится к способам стрельбы управляемыми ракетами и может быть использовано в системах наведения (СН) с телеориентацией ракеты в луче лазера.
Изобретение предназначено для управления комплексом вооружения при поражении наземных или малоскоростных воздушных целей и может быть использовано, например, в противотанковых ракетных комплексах (ПТРК).
Одной из задач, решаемых при разработке СН управляемых ракет, является повышение точности их наведения.
Известен способ стрельбы управляемыми ракетами с отклонением оси луча относительно линии визирования цели (ЛВЦ) и их совмещением перед подлетом к цели (Патент RU №2126946 от 25.11.1997 г., МПК F41G 7/26). Программное изменение фокусного расстояния в оптической системе (прицеле), реализующей этот способ, обеспечивает постоянство линейного размера луча и величины превышения на всех дальностях полета ракеты, начиная с момента начала изменения фокусного расстояния.
Согласно этому способу стрельба в режиме с превышением может осуществляться на дальность не менее некоторого значения Dmin, которое определяется временем подъема ракеты и спуском с него. Перед запуском ракеты в электронной схеме прицела производится сравнение измеренной дальности до цели Dц с хранящимся в памяти значением дальности Dmin, допускающей введение превышения. При Dц>Dmin стрельба производится в режиме с превышением, а при Dц<Dmin - без превышения. Кроме того, в электронной схеме прицела устанавливается время начала снятия превышения в соответствии с измеренной дальностью до цели Dц.
Для обеспечения встреливания ракеты указанным способом на носителе должна быть реализована установка двух разных углов пуска между осью ракеты и осью луча в момент запуска ракеты для двух указанных режимов стрельбы.
Недостатком такого способа является невозможность обеспечения двух режимов стрельбы в случае жесткой конструкции пускового устройства.
Наиболее близким к предлагаемому является способ стрельбы ракетой, управляемой по лучу лазера, описанный в патенте RU №2516383 от 29.11.2012 г. МПК F41G 7/26, и выбранный в качестве прототипа. Данный способ включает измерение дальности до цели и ввод измеренного значения в наземную систему управления, установку начального превышения оси луча относительно линии визирования цели, запуск управляемой ракеты, подъем оси луча до начального превышения относительно линии визирования цели (ЛВЦ) после момента запуска ракеты, полет ракеты на начальном превышении до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с линией визирования цели.
Недостатком указанного способа является то, что при стрельбе в тепловизионном (ТПВ) канале (узкое и широкое поле зрения) он не обеспечивает режим автоматического сопровождения цели до конца полета, из-за потери образа цели и длительного режима инерционного сопровождения, что снижает точность стрельбы, особенно при стрельбе по целям, совершающим маневр. Потеря образа цели связана с тем, что расположение сопла в маршевой двигательной установке, под углом вращающейся в полете управляемой ракеты, увеличивает размер видимого в ТПВ канал визирования пятна в течение времени работы маршевой двигательной установки. При этом, радиус пятна в ТПВ канале от ракеты Rп может достигать 1,5…2,5 м.
Стрельба указанным способом обеспечивает постоянную величину превышения, а к концу полета расстояние между пятном ракеты и пятном цели уменьшается пропорционально дальности полета, что приводит к их периодическому объединению и потере образа цели к концу полета.
Очевидно, что для исключения срывов автосопровождения целесообразно иметь величину превышения Ymax, линейный размер которого увеличивается пропорционально полетной дальности, при этом обеспечивается постоянство расстояния между пятном ракеты и пятном цели в поле строба автомата сопровождения (АС) и последующее совмещение оси луча с ЛВЦ.
Указанное может быть реализовано, например, дополнительным смещением центра строба АС цели относительно оси (перекрестия) лазерного канала управления (ЛКУ) на величину Yac. соответствующую углу отклонения εас.
Задачей предлагаемого изобретения является повышение вероятности попадания в цель в режиме автосопровождения цели и снижение вероятности обнаружения противником факта облучения цели лазерным излучением, что в свою очередь уменьшает вероятность обнаружения позиции комплекса.
Указанная задача достигается способом стрельбы ракетой, управляемой по лучу лазера, включающим измерение дальности до цели и ввод измеренного значения в наземную систему управления, установку начального превышения оси луча относительно линии визирования цели, запуск управляемой ракеты, подъем оси луча до начального превышения относительно ЛВЦ после момента запуска ракеты, полет ракеты на начальном превышении до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с линией визирования цели, новым является то, что до пуска ракеты определяют скорость цели, рассчитывают величину дополнительного углового превышения луча и суммарного начального превышения путем сложения начального и дополнительного превышения, рассчитывают время начала уменьшения суммарного превышения в зависимости от дальности до цели и ее скорости, после пуска ракеты отклоняют луч относительно ЛВЦ на суммарное начальное превышение и удерживают его в заданном положении в течении времени, соответствующего рассчитанному времени начала уменьшения суммарного превышения, при этом от момента пуска ракеты до момента начала уменьшения суммарного превышения луч отклоняют в горизонтальной плоскости относительно ЛВЦ на величину дополнительного углового превышения в вертикальной плоскости.
При этом, дополнительная величина превышения принимается равной значению
где εас - дополнительная величина превышения, град.;
Rn - радиус наблюдаемого пятна от маршевой двигательной установки ракеты, м;
D' - дальность стрельбы с суммарным превышением, м - определяется как дальность стрельбы, уменьшенная на величину, определяемую средней скоростью ракеты и временем опускания с превышения на линию визирования цели.
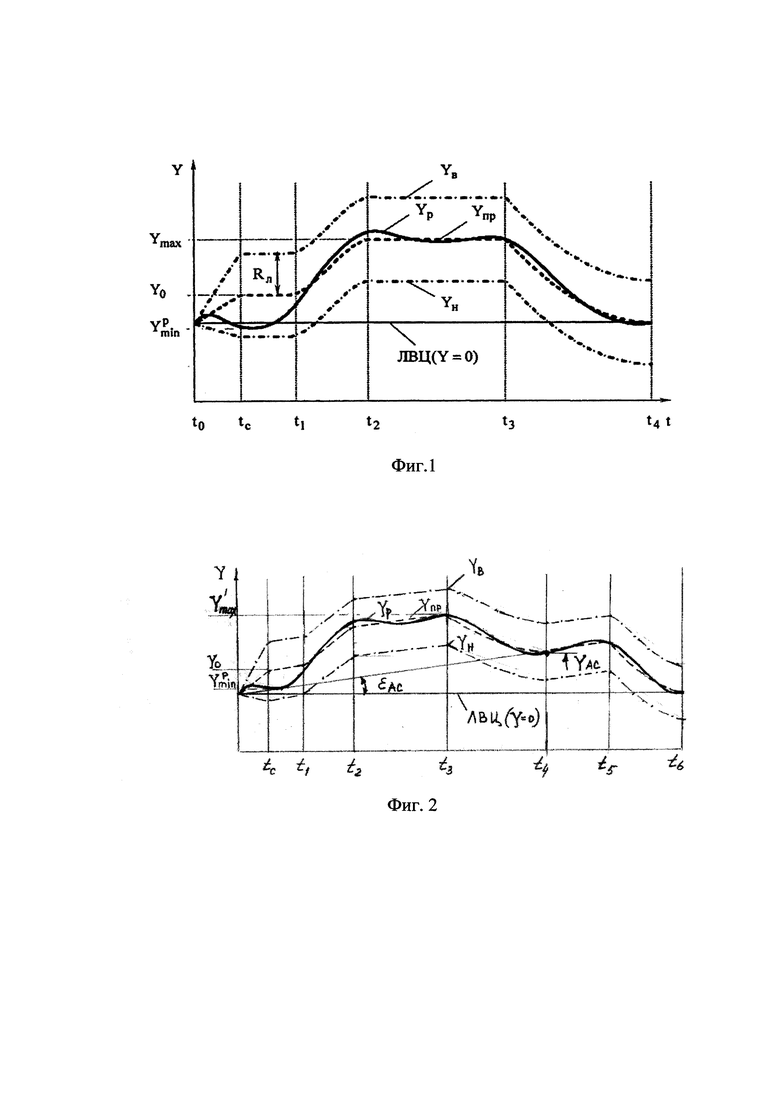
Изобретение поясняется графическим материалом, где на фиг. 1 представлена траектория полета ракеты в вертикальной плоскости по прототипу, а на фиг. 2 представлена траектория полета ракеты в вертикальной плоскости Yp с минимально возможным отклонением от ЛВЦ Ymin по предлагаемому способу, где обозначено:
Ymax - суммарное начальное превышение оси луча относительно линии визирования цели, м;
Ynp - величина превышения (положение оси луча), м;
Yв - верхняя граница луча, м;
Yн - нижняя граница луча, м;
Rл - радиус лазерного луча, м;
 - минимально возможное значение вертикального отклонения ракеты от линии визирования на этом участке полета, м;
- минимально возможное значение вертикального отклонения ракеты от линии визирования на этом участке полета, м;
Yp - траектория полета ракеты в вертикальной плоскости;
tc - момент начала сужения луча, с;
Yac - дополнительная величина превышения АС, м;
εас - угловая величина смещения центра строба АС относительно оси ЖУ, град.
Стрельба ракетой, управляемой по лучу лазера, по предлагаемому способу осуществляется следующим образом (Фиг. 2).
После измерения скорости Vц и дальности до цели Dц, в момент времени tИ и ввода измеренного значения в наземную систему управления, в прицел вводится значение минимальной дальности стрельбы D'min, в электронной схеме прицела определяется момент времени t3 аналогично известному способу, и устанавливается начальное превышение Y0 с учетом установленной дальности D'min.
Дополнительно в наземной системе управления приводами наведения производится установка фиксированного углового смещения центра оси луча лазерного канала управления на величину εас относительно линии визирования цели, обеспечивая суммарное превышение прицельного перекрестия - 
В наземной системе управления с учетом дальности и скорости цели производится расчет времени tnp начала опускания ракеты с превышения εас в соответствии с формулой:
 где
где
tnp - время начала опускания ракеты с превышения εас, с;
Dц - дальность до цели, м;
Vц - скорость цели, м/с;
Vp - средняя скорость ракеты, м/с,
tп - время производства выстрела, с;
tоп - время необходимое на опускание ракеты с превышения на линию визирования цели, с.
Производится запуск управляемой ракеты.
В течение времени от момента запуска ракеты t0 до момента t1 суммарное значение  сохраняют неизменным. Время t1 соответствует окончанию переходного процесса в системе наведения, которое с учетом возможных разбросов параметров системы наведения определяется как:
сохраняют неизменным. Время t1 соответствует окончанию переходного процесса в системе наведения, которое с учетом возможных разбросов параметров системы наведения определяется как:
Например, для ракеты с низкой начальной скоростью частота среза СН может составлять 0,25 Гц (0,25⋅2π рад/с); при этом t1=1,6…2,2 с.
Выполнение данного условия обеспечивает гарантированное нахождение ракеты в луче на участке переходного процесса (фиг. 2). После его окончания производят подъем превышения до максимального превышения  с момента времени t1 до момента времени t2 при максимально допустимой скорости подъема луча, которая устанавливается с учетом динамических свойств СН и конструктивных особенностей ее реализации в прицеле.
с момента времени t1 до момента времени t2 при максимально допустимой скорости подъема луча, которая устанавливается с учетом динамических свойств СН и конструктивных особенностей ее реализации в прицеле.
Дальнейший полет ракеты происходит на превышении с увеличением величины пропорционально полетной дальности до момента времени t3.
С момента времени t3 до момента времени t4 соответствующему дальности  производят снятие превышения ЛКУ до превышения Yac аналогично известным способам.
производят снятие превышения ЛКУ до превышения Yac аналогично известным способам.
Дальнейший полет ракеты происходит на превышении Yac с увеличением величины пропорционально полетной дальности, при этом обеспечивается постоянство расстояния между пятном ракеты и пятном цели и режим устойчивого автосопровождения.
При достижении времени t5 с помощью приводов наведения производят уменьшение превышения Yac до совпадения центра ЛКУ с ЛВЦ. tоп устанавливается с учетом динамических свойств СН и приводов наведения.
Наличие в наземной аппаратуре управления автомата сопровождения оснащенного приводами вертикального и горизонтального наведения позволяет применить указанный способ более оптимально. Для этого в указанном способе на время действия суммарного превышения в вертикальной плоскости εас относительно линии визирования цели дополнительно с помощью приводов наведения автоматизированной пусковой установки вводится боковое смещение точки наведения на аналогичную величину с соответствующим законом снятия бокового отклонения.
Обеспечение диагонального смещения точки наведения ЛКУ относительно линии визирования цели позволит исключить облучение цели и снизить вероятность обнаружения противником факта подсвета цели на стадии наведения ракеты на цель в СН, построенных на основе двух взаимно-перпендикулярных инжекционных лазерах, области излучения которых расположены перпендикулярно осям измеряемых координат, обладающих малой мгновенной площадью и короткой длительностью засветки местности в районе цели.
Указанные в способе новые операции реализуются с использованием пульта управления, автомата сопровождения цели, лазерного дальномера, телетепловизионного прицела, пусковой установки с приводами наведения.
Применение предлагаемого способа стрельбы ракетами, управляемыми по лучу лазера, позволяет повысить вероятность попадания в цель в режиме автосопровождения цели в тепловизионном и телевизионном канале за счет исключения перехода в длительный режим инерции из-за близкого расположения образа цели и ракеты на среднем и конечном участке полета.
Кроме того, данный способ позволит уменьшить вероятность обнаружения позиции комплекса и вероятность постановки помех за счет снижения вероятности обнаружения противником факта облучения цели лазерным излучением за счет облучения цели только в момент подлета ракеты к цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТРЕЛЬБЫ РАКЕТОЙ, УПРАВЛЯЕМОЙ ПО ЛУЧУ ЛАЗЕРА | 2012 |
|
RU2516383C1 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ, УПРАВЛЯЕМЫМ ПО ЛУЧУ ЛАЗЕРА, И ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ СНАРЯДА | 2015 |
|
RU2582308C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280232C1 |
| СПОСОБ СТРЕЛЬБЫ ПО ДВИЖУЩЕЙСЯ ЦЕЛИ ПРОТИВОТАНКОВОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ | 2014 |
|
RU2564051C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ И СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2219483C2 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
Изобретение относится к системам наведения ракет и может быть использовано в противотанковых ракетных комплексах. Технический результат - повышение вероятности попадания в цель в режиме автосопровождения цели и снижение вероятности обнаружения противником факта облучения цели лазерным излучением. По способу стрельбы ракетой, управляемой по лучу лазера, измеряют дальность до цели и определяют скорость цели. Осуществляют ввод значений дальности и скорости цели в наземную систему управления. Рассчитывают величину дополнительного углового превышения луча и суммарного начального превышения путем сложения начального и дополнительного превышения. Рассчитывают время начала уменьшения суммарного превышения в зависимости от дальности до цели и ее скорости. Запускают управляемую ракету. Осуществляют отклонение луча относительно ЛВЦ на суммарное начальное превышение и отклонение луча в горизонтальной плоскости относительно ЛВЦ на величину дополнительного углового превышения в вертикальной плоскости. Удерживают луч в заданном положении в течение времени, соответствующего рассчитанному времени начала уменьшения суммарного превышения. Осуществляют полет ракеты на суммарном начальном превышении до момента времени начала уменьшения суммарного превышения. После этого осуществляют совмещение оси луча с линией визирования цели. Дополнительную величину превышения принимают по аналитическому выражению. 1 з.п. ф-лы, 2 ил.
1. Способ стрельбы ракетой, управляемой по лучу лазера, включающий измерение дальности до цели и ввод измеренного значения в наземную систему управления, установку начального превышения оси луча относительно линии визирования цели, запуск управляемой ракеты, подъем оси луча до начального превышения относительно линии визирования цели - ЛВЦ после момента запуска ракеты, полет ракеты на начальном превышении до момента времени, установленного в наземной системе управления в соответствии с измеренной дальностью до цели, и совмещение оси луча с линией визирования цели, отличающийся тем, что до пуска ракеты определяют скорость цели, рассчитывают величину дополнительного углового превышения луча и суммарного начального превышения путем сложения начального и дополнительного превышения, рассчитывают время начала уменьшения суммарного превышения в зависимости от дальности до цели и ее скорости, после пуска ракеты отклоняют луч относительно ЛВЦ на суммарное начальное превышение и удерживают его в заданном положении в течение времени, соответствующего рассчитанному времени начала уменьшения суммарного превышения, при этом от момента пуска ракеты до момента начала уменьшения суммарного превышения луч отклоняют в горизонтальной плоскости относительно ЛВЦ на величину дополнительного углового превышения в вертикальной плоскости.
2. Способ стрельбы ракетой по п. 1, отличающийся тем, что дополнительную величину превышения принимают равной значению
где Rn - радиус наблюдаемого пятна от маршевой двигательной установки ракеты, м;
D' - дальность стрельбы с суммарным превышением, м, определяемая как дальность стрельбы, уменьшенная на величину, определяемую средней скоростью ракеты и временем опускания с превышения на линию визирования цели.
| СПОСОБ СТРЕЛЬБЫ РАКЕТОЙ, УПРАВЛЯЕМОЙ ПО ЛУЧУ ЛАЗЕРА | 2012 |
|
RU2516383C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2331036C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2008 |
|
RU2390717C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2362106C1 |
| US 5427328 A, 27.06.1995. | |||

