Область техники
Изобретение относится к комплексным автоматизированным системам управления посадкой летательных аппаратов и может быть использовано для осуществления безопасной посадки самолета или вертолета в условиях плохой видимости.
Уровень техники
Известна система автоматической посадки летательных аппаратов (ЛА) в условиях плохой видимости [1], содержащая бортовую навигационную аппаратуру на ЛА, спутниковую радионавигационную систему (ГЛОНАСС) и наземное навигационное оборудование, включающее в себя n приемопередатчиков (n≥3), расположенных в зоне взлетно-посадочной полосы (ВПП), при этом входы приемопередатчиков сопряжены с спутниковой радионавигационной системой, а выходы - с бортовой навигационной аппаратурой.
Недостатками известной системы являются недостаточная точность (порядка нескольких метров) [2] определения координат ЛА относительно реальной ВПП и невозможность использования собственного опыта пилотов при посадке.
Известна комплексная система управления полетом и посадкой ЛА (самолета) [3], содержащая бортовую навигационную аппаратуру самолета и внешнюю навигационную систему, каналы связи которой сопряжены с соответствующими каналами связи бортовой навигационной аппаратуры, включающей в себя блок вычисления двумерных (2D) либо трехмерных (3D) координат самолета по показаниям навигационных датчиков (сенсоров), генератор электронной 2D либо 3D карты местности и многофункциональный дисплей с возможностью 2D и 3D отображения, вход которого соединен с выходом генератора электронной 2D либо 3D карты местности, вход которого соединен с выходом блока вычисления 2D либо 3D координат самолета.
В известной системе с помощью многофункционального 2D/3D дисплея, отображающего в том числе показания ряда навигационных приборов, экипаж визуально контролирует расположение самолета в 2D/3D координатах на фоне электронной 2D/3D карты местности. В процессе полета и при посадке самолета использование 3D отображения позволяет улучшить различимость позиций символа самолета относительно изображения ВПП.
Однако здесь экипаж наблюдает на многофункциональном дисплее не реальные внекабинную обстановку и ВПП, поскольку наблюдаемое изображение формируется генератором электронной карты местности по электронной географической базе данных, при этом положение символа самолета в двух или трех координатах вычисляется объединением показаний ряда навигационных датчиков, например приемников глобальной навигационной системы (GPS), датчиков положения (position sensors) типа антенн, датчиков направления (heading sensors) типа компасов или гироскопов, датчиков высоты (altitude) в виде радиолокаторов и сигналов приемопередатчиков управления воздушным движением (air traffic control). Точность такого опосредованного позиционирования символа самолета в 3D пространстве зависит в первую очередь от точности работы таких навигационных датчиков, которая, в свою очередь, сильно зависит от реальной ситуации в внекабинном пространстве, например, от расстояния до ВПП. При управлении посадкой самолета только по электронной 3D карте местности невозможно достаточно точно определить абсолютные 3D координаты самолета относительно реальной ВПП, особенно при минимальных расстояниях до нее, поскольку точность самой электронной 3D карты местности и точность ее электронной привязки к реальной ВПП в этом случае должны быть выверены до долей метра, что проблематично из-за недостаточной для этого точности радионавигационных средств.
Следовательно, в известной системе при осуществлении посадки ЛА в плохих условиях видимости имеет место недостаточно точная визуальная ориентация пилота по наблюдаемому на экране дисплея искусственному изображению положения ЛА относительно реальной ВПП.
Задачей изобретения является улучшение точности визуальной ориентации пилота (экипажа) в реальной внекабинной обстановке (относительно поверхности реальной ВПП) при посадке ЛА в плохих условиях видимости.
Раскрытие изобретения
Поставленная задача в системе, содержащей бортовую аппаратуру ЛА и внешнюю навигационную подсистему, каналы связи которой сопряжены с соответствующими каналами связи бортовой аппаратуры, включающей в себя процессорный блок для вычисления навигационных координат ЛА, генератор электронной карты местности и многофункциональный дисплей с функциями двумерного и трехмерного отображения, вход которого соединен с выходом генератора электронной карты местности, вход которого подключен к выходу процессорного блока, решается тем, что в систему дополнительно введен по крайней мере один оптоэлектронный модуль стереоскопического отображения, находящийся в составе бортовой аппаратуры и содержащий блок обработки бинокулярного изображения и бинокулярную видеокамеру, вход которой оптически сопряжен с зоной ВПП, а выход - с входом блока обработки бинокулярного изображения, выход которого подключен к второму входу многофункционального дисплея, при этом спектр чувствительности сенсора бинокулярной видеокамеры соответствует спектру прозрачности внекабинной оптической среды между ЛА и ВПП в условиях плохой видимости.
В конкретном варианте выполнения системы бинокулярная видеокамера выполнена в виде сдвоенной видеокамеры ночного видения или в виде сдвоенной тепловизионной видеокамеры дальнего инфракрасного (ИК) диапазона, а наземная навигационная аппаратура внешней навигационной подсистемы включает в себя ИК маяки, которые расположены в зоне ВПП и спектр излучения которых соответствует спектру чувствительности сенсора бинокулярной видеокамеры.
В частном варианте выполнения системы оптоэлектронный модуль выполнен с ортостереоскопическим отображением (ортоскопическим стереотображением), которое позволяет сохранить перспективу и пропорции рельефа реальной ВПП в наблюдаемом стереоизображении. В плохих условиях видимости при прямом наблюдении ортостереоскопического изображения ВПП с помощью многофункционального дисплея в сочетании с оперативным учетом пилотом показаний всех релевантных навигационных приборов пилот имеет возможность применить свой опыт посадки ЛА, наработанный за все годы обучения и профессиональной работы в условиях нормальной видимости ВПП из кабины ЛА. Ортоскопическое стереоизображение зоны ВПП содержит точную информацию о расстоянии до ВПП в величине бинокулярного параллакса, по которому зрение создает стереоизображение ЛА в сознании пилота. При таком прямом формировании и наблюдении стереоизображения реальной сцены пилот воспринимает точное изображение реальной ВПП, снятое видеокамерой в ИК диапазоне спектра (а не графически синтезированное отображение ВПП из электронной базы данных с электронной привязкой с помощью ряда навигационных приборов).
Тем самым достигается основной технический результат, состоящий в улучшение точности ориентации пилота во внекабинной визуальной обстановке. Наличие ИК маяков в зоне ВПП позволяет более четко идентифицировать ее положение в объемной сцене, восстанавливаемой в сознании пилота, поскольку изображения ИК маяков представлены яркими точками, 3D координаты которых в наблюдаемом пилотом стереоскопическом пространстве уверенно определяются его зрением.
В частном варианте выполнения системы блок обработки бинокулярного изображения включает в себя измеритель величины параллакса в бинокулярном изображении ИК маяка. Дополнительный технический результат состоит здесь в увеличении надежности определения текущего расстояния ЛА от ВПП за счет объективного (инструментального) определения точного расстояния в дополнение к его оценке зрением пилота.
Перечень чертежей
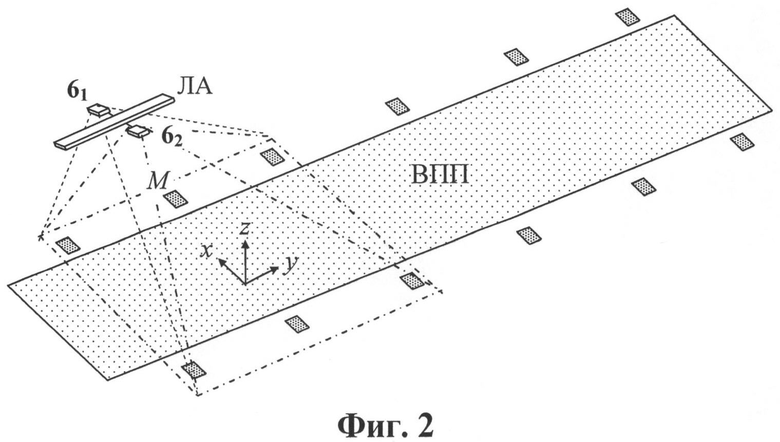
Фиг.1 - структурная схема комплексной системы управления посадкой ЛА.
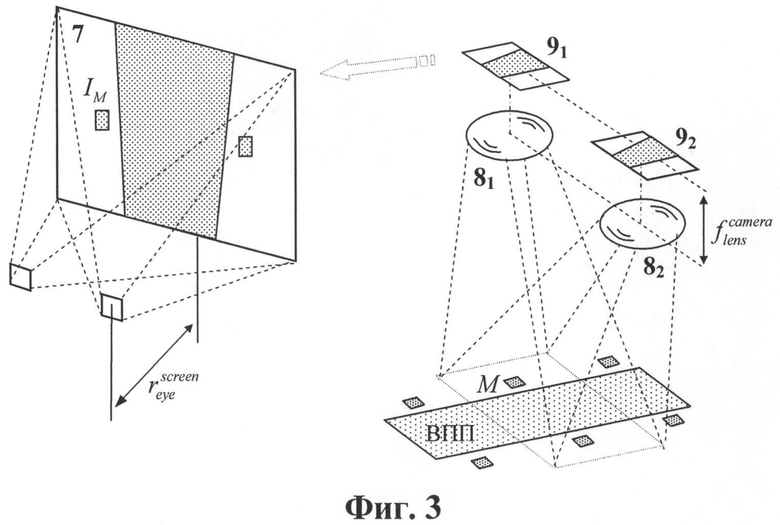
Фиг.2 - оптическая схема стереовидеосъема зоны ВПП.
Фиг.3 - оптическая схема ортостереоскопического отображения зоны ВПП.
Фиг.4 - бинокулярный параллакс в изображении ПК маяка.
Осуществление изобретения
Комплексная система управления посадкой ЛА (фиг. 1) содержит бортовую аппаратуру ЛА и внешнюю навигационную систему, соответствующие каналы связи которых сопряжены между собой, при этом бортовая аппаратура содержит совокупность 1 навигационных датчиков, процессорный блок 2 вычисления навигационных координат ЛА, генератор 3 электронной карты местности и многофункциональный дисплей 4 с функциями двумерного и трехмерного отображения, первый вход которого соединен с выходом генератора 3 электронной карты местности, вход которого соединен с выходом процессорного блока 2, вход которого соединен с выходом совокупности 1 навигационных датчиков, а также оптоэлектронный модуль ортостереоскопического отображения, содержащий блок 5 обработки бинокулярного изображения и бинокулярную видеокамеру 6, вход которой (входы двух соответствующих моноскопических видеокамер 61 и 62) оптически сопряжен с зоной ВПП, а выход бинокулярной видеокамеры 6 соединен с входом блока 5 обработки бинокулярного изображения, выход которого подключен к второму входу многофункционального дисплея 4, при этом спектральная чувствительность бинокулярной видеокамеры 6 соответствует ближнему и/или дальнему инфракрасному диапазону (соответствует спектру прозрачности внекабинной среды между ЛА и ВПП в условиях плохой видимости).
В конкретном варианте осуществления системы наземная навигационная аппаратура внешней навигационной подсистемы включает в себя совокупность ИК маяков, расположенных в зоне ВПП, при этом спектр излучения ИК маяков соответствует спектру чувствительности сенсоров 91 и 92 бинокулярной видеокамеры 6, которая выполнена в виде сдвоенной видеокамеры ночного видения или сдвоенной тепловизионной видеокамеры дальнего ИК диапазона с длиной волны от 8 до 14 микрометров. На фиг. 1 показан ИК маяк М, ближайший к ЛА в зоне видеосъема в текущий момент посадки.
В примере конкретного выполнения бинокулярной видеокамеры 6 две раздельные моноскопические видеокамеры 61 и 62 установлены на фюзеляже или крыльях ЛА (фиг. 2) и обеспечивают в процессе его посадки видеосъем текущей зоны ВПП.
В одном примере конкретного выполнения многофункциональный дисплей 4 включает в себя стереоскопический видеопроектор, выход которого оптически сопряжен с лобовым стеклом кабины летательного аппарата.
В другом примере конкретного выполнения многофункциональный дисплей 4 включает в себя нашлемный стереоскопический индикатор, первый и второй выходы которого соответствуют левому и правому окнам наблюдения стереоизображения.
Ортостереоскопическое отображение ЗD сцены реального мира сохраняет неискаженными ее перспективу и рельеф [4] за счет сохранения в наблюдаемой виртуальной 3D сцене угловых соотношений между наблюдаемыми объектами 3D сцены реального мира. Условие соответствия углов в виртуальной и реальной 3D сценах обеспечивается (фиг. 3) выполнением соотношения

где



Масштабный коэффициент
В частном варианте осуществления системы блок 5 обработки бинокулярного изображения включает в себя измеритель величины р параллакса в бинокулярном изображении ИК маяка (фиг. 4), который соответствует расстоянию между левым и правым ракурсами 

Наряду с этим наземное навигационное оборудование комплексной системы посадки ЛА включает в себя, например, дальнюю и ближнюю приводные радиостанции, внешняя навигационная подсистема - систему глобальной спутниковой навигации (ГЛОНАСС/GРS), а бортовая навигационная аппаратура ЛА - высотомер на основе частотной модуляции радиосигнала и приемники сигналов приводных радиостанций.
Система работает следующим образом на примере посадки самолета. На дальней (около 50 км) дистанции до ВПП экипаж осуществляет заход на заданный маршрут посадки, руководствуясь наблюдаемым (с помощью многофункционального дисплея) движением символа самолета по маршруту, проложенному на электронной карте местности с помощью системы глобальной спутниковой навигации (ГЛОНАСС/GРS). На средней дистанции (около 10 км) при получении сигнала дальней приводной радиостанции включается программа полета по заданной глиссаде, используя данные по высоте самолета от бортового высотомера с частотной модуляцией радиосигнала, при этом выдерживается положение символа самолета как между верхней и нижней границей глиссады, отображаемой на фоне электронной карты местности, так и азимут курса относительно осевой линии ВПП. На ближней дистанции (около 1 км) при получении сигнала ближней приводной радиостанции первый пилот в условиях плохой видимости осуществляет посадку самолета на ВПП, руководствуясь наблюдаемым ортостереоскопическим изображением реальной ВПП, формируемым с помощью многофункционального дисплея по видеосигналу от бинокулярной видеокамеры 6, воспринимающей изображение реальной ВПП в ближнем и/или дальнем ИК диапазоне спектра. При этом экипаж принимает во внимание показания всех остальных навигационных приборов.
Тем самым посадка ЛА даже в условиях плохой видимости осуществляется экипажем с полным использованием его профессионального опыта по посадке ЛА, соответствующего наблюдению реальных ВПП в нормальных условиях видимости. При осуществлении посадки ЛА с использованием наблюдаемого (с помощью многофункционального дисплея) ортостереоскопического изображения реальной ВПП обеспечиваются привычные для экипажа (пилота) перспектива и пространственный рельеф ВПП, повторяющие перспективу и пространственный рельеф реальной ВПП, которые в условиях нормальной видимости напрямую воспринимались бы пилотом из кабины.
При работе частного варианта системы, включающем в себя измеритель величины параллакса р в бинокулярном изображении ИК маяка, инструментально точно определятся приближение величины р к тому значению, которое соответствует максимально близкому расположению ЛА к ВПП (контакту его шасси с ВПП). Такой инструментальный контроль приближения ЛА к ВПП является объективным дополнением к визуальному контролю пилотом расстояния до ВПП, что дополнительно повышает надежность работы системы посадки. Можно настроить стереоскопическую подсистему отображения так, чтобы в тот момент, когда шасси ЛА коснется ВПП, ИК маяки отображались точно в плоскости экрана многофункционального дисплея, что будет соответствовать нулевому значение р = 0 параллакса в изображении текущего ближайшего ИК маяка М. (Соответствующая начальная настройка оптоэлектронного модуля 6 ортоскопического стереоотображения осуществляется, в частности, выбором расстояния между двумя видеокамерами 61 и 62). До момента контакта шасси с ВПП текущий ближайший ИК маяк М будет отображаться в заэкранном пространстве (в пространстве за экраном 7 многофункционального дисплея), а по мере приближения ЛА к ВПП стереоизображение маяка М приближается к плоскости экрана 7.
Аналогично по ортостереоскопическому изображению ВПП осуществляется посадка вертолета с использованием соответствующего набора навигационных приборов в составе комплексной системы посадки. При этом по ортостереоскопическому стереоизображению возможен также визуальный контроль реального положения перемещаемых вертолетом грузов относительно посадочной площадки в условиях плохой видимости.
Конкретно сдвоенные бинокулярные видеокамеры, работающие в области ИК спектра, выполнены, например, в виде стандартных (моноскопических) инфракрасных видеокамер или тепловизоров телевизионного типа.
Предпочтительным вариантом выполнения многофункционального дисплея являются безочковый (автостереоскопический) дисплей с электронным переключением 2D/3D) отображения [5].
Трехмерность наблюдаемого пилотом изображения позволяет улучшить различимость ВПП в условиях плохой видимости особенно при наличии любых случайных шумов, в том числе - тепловых шумов, возникающих, в частности, из-за недостаточной чувствительности сенсоров видеокамер при слабом ИК излучении от наблюдаемых объектов реальной сцен. В наблюдаемом трехмерном стереоскопическом изображении (виртуальном трехмерном пространстве) шумовые составляющие изображения практически равномерно рассеиваются по всему объему виртуального трехмерного пространства в силу стохастического характера шума, а энергия полезного сигнала (изображения ВПП) сосредотачивается, концентрируется в определенных областях виртуального трехмерного пространства, которые соответствуют по расположению тем областям реального пространства, где находится реальная ВПП. Если бы использовалось моноскопическое (2D) изображение ВПП, то на него напрямую (в одной и той же плоскости 2D экрана) накладывалось бы изображение тепловых шумов сенсора 2D видеокамеры, что привело бы к ухудшению различимости ВПП в таком 2D изображении по сравнению с ее наблюдением в стереоскопическом трехмерном изображении в соответствии с изобретением.
Измерение величины параллакса в бинокулярном изображении с помощью блока обработки бинокулярного изображения позволяет также автоматизировать процесс посадки (без необходимости в принятии пилотом субъективного решения о наступлении контакта с поверхностью ВПП в процессе визуального контроля пилотом этого контакта), поскольку регистрация (блоком обработки бинокулярного изображения без участия пилота) нулевого значения параллакса для изображения ИК маяков ВПП означает наличие физического контакта шасси летательного аппарата с реальной ВПП, по факту которого может быть автоматически выполнен соответствующий маневр летательного аппарата.
Промышленная применимость
В целом путь реализации задачи изобретения отвечает современным тенденциям использования при посадке ЛА всепогодных автоматизированных систем [6], включая компьютерное моделирование условий захода на посадку [7, 8], в том числе совместное использование радиолокационных и спутниковых данных [9], а также использование 3D изображений [10-16] для достижения максимальной информативности и функциональности навигационных систем ЛА.
В результате решения задачи изобретения улучшается точность ориентации пилота (экипажа) при посадке, наблюдающего внекабинное 3D пространства с помощью ПК видеокамер независимо от показаний других навигационных приборов при параллельном учете пилотом этих показаний вместо осуществляемых в известных технических решениях вычислениях на базе показаний навигационных приборов, дающих менее точную ориентацию экипажа при посадке.
Литература
[1] Rowson S.V., Stull C.A., VanderDierendonck G.R. GPS differential landing system. - Патент США №6067484, МКИ G06F 19/00, опублик. 23.05.2000.
[2] Урлилич Ю.М., Дворкин В.В., Марков С.С., Поваляев Е.А. Система высокоточной автоматической посадки летательных аппаратов. - Патент РФ №2287838, МКИ G01S 1/00, заявл. 24.12.2004.
[3] Simon G.M. Aircraft traffic awareness system and methods. - Патент США №8185301, МКИ G05D 1/02, опублик. 22.05.2012 (прототип).
[4] Валюс Н.А. Оптические принципы воспроизведения пространственных изображений: - В кн. Стереоскопия, Москва, Изд. АН СССР, 1962.
[5] Lee В., Park J.-H. Overview of 3D/2D switchable liquid crystal display technologies. - Proc. SPIE, 2010, v.7618, p.761806.
[6] Завалишин О.Н. Комплексированный универсальный всепогодный способ определения местоположения и посадки воздушного судна и устройство для его осуществления. - Патент РФ №2441203, МКИ G01C 21/24, заявл. 29.09.2010.
[7] Лаказ И., Фукар В., Менорваль Ж.-А. Способ и устройство, способствующие управлению полетом самолета при заходе на посадку. - Патент РФ №2351898, МКИ G01C 23/00, заявл. 03.05.2006.
[8] Гальперин Т.В., Лапин Б.А., Сулейманов Р.Н. Комплексная система посадки летательных аппаратов и способ захода на посадку. - Патент РФ №2341774, МКИ G01C 23/00, заявл. 21.11.2006.
[9] Александров В.В. Способ управления самолетом при заходе на посадку. - Патент РФ №2267747, МКИ G01C 21/26, заявл. 07.05.2004.
[10] McCusker P. D. Method and system for the cursor-aided manipulation of flight plans in 2D and 3D displays. - Патент США №8073578, МКИ Go6G 7/72, опублик. 06.12.2011.
[11] Seah K.A. Head-up display/synthetic vision system predicted flight path depiction. - Патент США №8089375, МКИ G01C 21/08, опублик. 06.12.2011.
[12] VanderSpek J. Flight guidance and navigation display for a helicopter. - Патент США №8155805, МКИ G06F 7/70, опублик. 10.04.2012.
[13] Schmidt H., Chen Т., Lee A. System and method for advanced 3D visualization for mobile navigation units. - Патент США №6885939, МКИ G01C 21/26, опублик. 26.04.2005.
[14] Markinton V., Laine F., Renault E. System for piloting an aircraft. - Международная пат.заявка PCT/FR07/00037, МКИ G08G 5/02, опублик. 19.07.2007.
[15] Zimmerman K.A., Albert G.J., Lance D.W. System, module and method for creating a varying FOV image presented on a HUD combiner unit. - Патент США №7961117, МКИ G01C 21/00, опублик. 04.06.2011.
[16] Petillon J.-P. Secure interactive 3D navigation method and device. - Патент США №7346437, МКИ G01C 23/00, опублик. 18.03.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕРЕОСКОПИЧЕСКИЙ ИНДИКАТОР С ОТОБРАЖЕНИЕМ ТРЕХМЕРНОЙ ИНФОРМАЦИИ СКВОЗЬ ЛОБОВОЕ СТЕКЛО ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2610620C1 |
| НАШЛЕМНОЕ УСТРОЙСТВО ДЛЯ ОТОБРАЖЕНИЯ ОПЕРАТИВНОЙ ИНФОРМАЦИИ И ОКРУЖАЮЩЕЙ ОБСТАНОВКИ С ЗАЩИТОЙ ОТ ВЫСОКОЙ ВНЕШНЕЙ ЗАСВЕТКИ | 2012 |
|
RU2494443C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| СПОСОБ УПРАВЛЕНИЯ БОРТОВЫМ ОБОРУДОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2828758C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2004 |
|
RU2264953C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОСТРАНСТВЕННОЙ ИНФОРМАЦИИ | 2016 |
|
RU2619049C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ПОСАДКИ И УСТРОЙСТВО КИРИЛЛОВА ВИЗУАЛЬНОГО ОБЕСПЕЧЕНИЯ ВЗЛЕТА ИЛИ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2475424C1 |
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| Способ воспроизведения условий полета при помощи использования технологии виртуальной реальности на настольном пилотажном стенде для проведения эргономических исследований по информационно-управляющему полю пилотажной кабины | 2022 |
|
RU2793663C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2285933C1 |

Изобретение относится к комплексным автоматизированным системам управления посадкой летательных аппаратов и может быть использовано для осуществления безопасной посадки самолета или вертолета в условиях плохой видимости. Комплексная система содержит бортовую аппаратуру летательного аппарата и внешнюю навигационную подсистему. Бортовая аппаратура включает в себя процессорный блок для вычисления навигационных координат летательного аппарата, генератор электронной карты местности и многофункциональный дисплей с функциями двумерного и трехмерного отображения, оптоэлектронный модуль ортостереоскопического отображения. Оптоэлектронный модуль ортостереоскопического отображения содержит блок обработки бинокулярного изображения и бинокулярную видеокамеру с спектральной чувствительностью в ближнем и/или дальнем инфракрасном диапазоне. Вход бинокулярной видеокамеры оптически сопряжен с зоной взлетно-посадочной полосы либо площадки. Выход бинокулярной видеокамеры соединен с входом блока обработки бинокулярного изображения, выход которого подключен к второму входу многофункционального дисплея. Технический результат заключается в улучшении точности ориентации пилота в внекабинной визуальной обстановке. 4 з.п. ф-лы, 4 ил.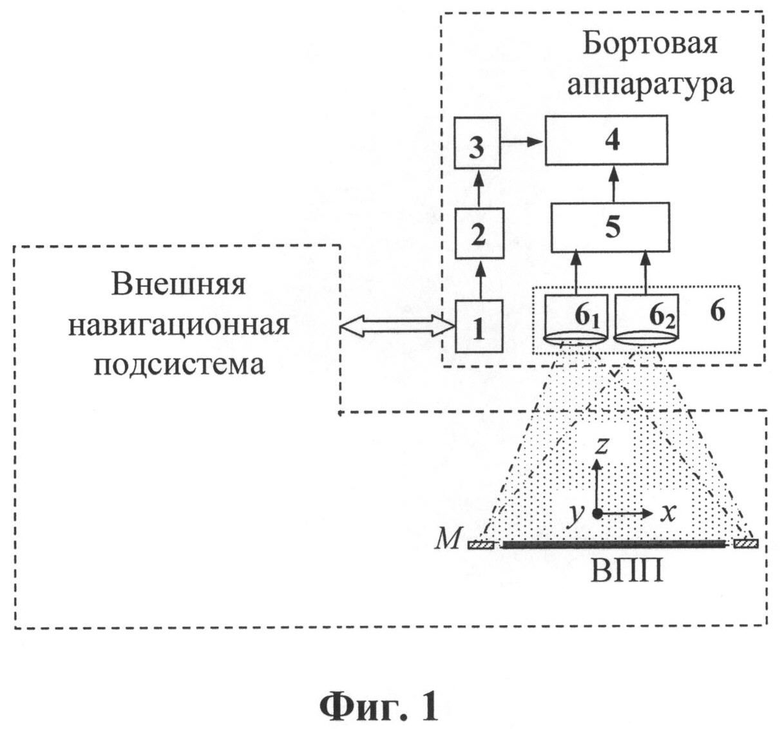
1. Комплексная система посадки летательного аппарата, содержащая бортовую аппаратуру летательного аппарата и внешнюю навигационную подсистему, каналы связи которой сопряжены с соответствующими каналами связи бортовой аппаратуры, включающей в себя процессорный блок для вычисления навигационных координат летательного аппарата, генератор электронной карты местности и многофункциональный дисплей с функциями двумерного и трехмерного отображения, первый вход которого соединен с выходом генератора электронной карты местности, вход которого соединен с выходом процессорного блока, отличающаяся тем, что в систему дополнительно введен по крайней мере один оптоэлектронный модуль ортостереоскопического отображения, находящийся в составе бортовой аппаратуры и содержащий блок обработки бинокулярного изображения и бинокулярную видеокамеру с спектральной чувствительностью в ближнем и/или дальнем инфракрасном диапазоне, соответствующей спектру прозрачности внекабинной оптической среды между летательным аппаратом и взлетно-посадочной полосой либо площадкой в условиях плохой видимости, при этом вход бинокулярной видеокамеры оптически сопряжен с зоной взлетно-посадочной полосы либо площадки, а выход бинокулярной видеокамеры соединен с входом блока обработки бинокулярного изображения, выход которого подключен к второму входу многофункционального дисплея.
2. Система по п. 1, отличающаяся тем, что блок обработки бинокулярного изображения включает в себя измеритель величины параллакса в бинокулярном изображении.
3. Система по п.1 или 2, отличающаяся тем, что наземное навигационное оборудование внешней навигационной подсистемы включает в себя инфракрасные маяки, которые расположены в зоне взлетно-посадочной полосы либо площадки и спектр излучения которых соответствует спектру чувствительности сенсора бинокулярной видеокамеры.
4. Система по п.1 или 2, отличающаяся тем, что многофункциональный дисплей включает в себя стереовидеопроектор, выход которого оптически сопряжен с лобовым стеклом кабины летательного аппарата.
5. Система по п.1 или 2, отличающаяся тем, что многофункциональный дисплей включает в себя нашлемный стереоскопический индикатор, первый и второй выходы которого соответствуют левому и правому окнам наблюдения стереоизображения.
| US 8185301 B1, , 22.05.2012 | |||
| WO 2011123455 A1, 06.10.2011 | |||
| СПОСОБ ФОРМИРОВАНИЯ И НАБЛЮДЕНИЯ СТЕРЕОИЗОБРАЖЕНИЙ С МАКСИМАЛЬНЫМ ПРОСТРАНСТВЕННЫМ РАЗРЕШЕНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2008 |
|
RU2408163C2 |
| СИСТЕМА КОНТРОЛЯ ВЗЛЕТА ИЛИ ПОСАДКИ САМОЛЕТА | 2001 |
|
RU2192368C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ | 2001 |
|
RU2184683C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОРТОСТЕРЕОСКОПИЧЕСКОГО ИЗОБРАЖЕНИЯ | 1991 |
|
RU2093970C1 |
| US 6067484 A, 23.05.2000; | |||
| СИСТЕМА ВЫСОКОТОЧНОЙ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2287838C2 |
| КОМПЛЕКСИРОВАННЫЙ УНИВЕРСАЛЬНЫЙ ВСЕПОГОДНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ПОСАДКИ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2441203C1 |
| СПОСОБ И УСТРОЙСТВО, СПОСОБСТВУЮЩИЕ УПРАВЛЕНИЮ ПОЛЕТОМ САМОЛЕТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2006 |
|
RU2351898C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2006 |
|
RU2341774C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| US 8073578 В1, 06.12.2011 | |||

