Изобретение относится к измельчительному оборудованию - валковым дробилкам, предназначенным для переработки губчатого титана и губчатого циркония, и может быть использовано в технологических линиях предприятий цветной металлургии, горнорудной, нерудной и строительной отраслей промышленности для переработки материалов, имеющих твердую структуру, при дроблении которых на валках дробилки возникают распорные усилия до 400 т.
Известен валковый измельчитель, предназначенный для измельчения известняка, цементного клинкера, руд черных и цветных металлов, патент Российской Федерации №2031710, кл. В02С 4/28, заявл. 07.05.1992 г., опубл. 27.03.1995 г. Валковый измельчитель содержит опорную раму, неподвижный и подвижный валки, каждый из которых через соответствующие подшипниковые корпуса установлен в соединенных друг с другом балкой рычагах, шарнирно связанных с опорной рамой, и силовой элемент упругого воздействия на валки. Подвижный валок с рычагами и балкой зафиксирован в рабочем положении с помощью П-образной стойки, охватывающей балку и жестко закрепленной на опорной раме. Балка прижата к стойке с помощью силового элемента упругого воздействия на валки, выполненного в виде пружинного блока, состоящего из сдвоенного пакета стянутых общими шпильками пружин, при этом один из пакетов расположен под балкой, другой - над стойкой. Усилие затяжки пружин обеспечивает требуемое рабочее усилие между валками. Привод вращения каждого валка осуществляется, например, от электродвигателя через планетарный редуктор (в патенте не изображен). Этот измельчитель по функции своей работы относится к категории пресс-валковых измельчителей, когда дробимый материал подвергается достаточно большому прессовому сжатию валками.
Недостатком конструкции данного валкового измельчителя является невозможность обеспечения требуемого размера фракции материала из-за непостоянства зазора между валками. Это возникает из-за того, что в процессе дробления способом прессования невозможно получить величину заданного зазора между валками путем поджатия подвижного валка к неподвижному только плечом рычага, на который воздействует пружинный блок. При спрессовывании материала или при попадании между валками недробимой фракции материала зазор между валками будет меняться.
Другим недостатком конструкции валкового измельчителя является создание предварительного сжатия пружин под усилием их затяжки. Это приводит к появлению в шпильках (как минимум в их резьбовой части) сил кручения, которые, добавляясь к необходимым силам растяжения, требуют увеличения габаритных размеров и жесткости шпилек. Поэтому такая затяжка шпилек при усилиях, достигающих порядка десятка тонн, в условиях эксплуатации дробилки на производстве практически трудно выполнима - необходимо для этих целей наличие спецоснастки.
Еще одним недостатком конструкции рассматриваемого валкового измельчителя является то, что он не обеспечивает задержку недробимых фракций и остановку процесса дробления для исключения их попадания в измельченный материал.
Известная валковая дробилка содержит опорную раму, камеру резания с загрузочным бункером, размещенные в камере резания в соответствующих подшипниковых корпусах параллельно друг другу неподвижный и подвижный валки, установленные на предусмотренных на опорной раме стационарной и поворотной площадках соответственно, и силовые элементы упругого воздействия на валки. При этом поворотная площадка закреплена на опорной раме шарнирным соединением, эксцентрично расположенным относительно стационарной площадки и тем самым обеспечивающим сближение неподвижного и подвижного валков друг к другу. Перемещение поворотной площадки относительно стационарной для регулировки зазора между валками при настройке осуществляют автономным силовым гидравлическим приводом, оборудованным подъемником и сервомотором. Силовые элементы упругого воздействия на валки выполнены в виде пружин, которые поджимают подвижный валок к неподвижному и обеспечивают постоянный контакт поверхности валков с материалом в процессе его дробления.
Основным недостатком конструкции данной валковой дробилки является то, что силовые элементы упругого воздействия на валки настраиваются на противодействие силам резания только определенной величины, связанной со структурой материала определенной твердости. При попадании же между валками недробимого материала силовые элементы уже не удерживают его между валками и пропускают в конечный продукт.
Другим существенным недостатком конструкции рассматриваемой валковой дробилки является то, что усилия дробления материала через подвижный валок воздействуют на пружины и всегда равны усилиям пружины. А для удержания подвижного валка в исходном положении необходимо создание усилиями пружин силы, равной или превышающей усилие дробления материала, что в данной конструкции невозможно. Для дробления особо твердых материалов таких, например, как титановая или циркониевая губка, потребуется значительное увеличение габаритных размеров и количества пружин в силовых элементах упругого воздействия на валки дробилки, то есть необходима переоснастка дробилки новыми конструктивными элементами.
Еще одним недостатком валковой дробилки является то, что система взаимодействия всех механизмов ее конструкции медлительна в работе и не предусматривает контроль за получением размера заданной фракции материала после дробления и исключение попадания недробимых включений материала в конечный продукт.
Из известных валковых дробилок наиболее близкой по технической сущности является валковая дробилка, описанная в патенте США №5060874, кл. В02С 1/08, заявл. 10.12.90 г., опубл. 29.10.91 г. Валковая дробилка содержит опорную раму, камеру резания с загрузочным бункером, размещенные в камере резания параллельно друг другу неподвижный и подвижный валки, установленные в неподвижных и подвижных подшипниковых корпусах соответственно, и силовые элементы упругого воздействия на валки. Перемещение подвижного валка осуществляют путем воздействия на каждый его подшипниковый корпус винтового домкрата, набора подвижных шарнирных продольных рычагов, расположенных между винтовым домкратом и подшипниковым корпусом, и силового элемента упругого воздействия на валки в виде вертикального пружинного блока, с которым соединен правый рычаг набора. При превышении усилий дробления, например от проходящего между валками дробилки недробимого материала, подвижный валок перемещается вправо, при этом угол между левым и правым рычагами из каждого набора подвижных шарнирных продольных рычагов и горизонталью увеличивается. Увеличивается также усилие сжатия пружин вертикальных пружинных блоков, а ставший большим зазор между валками дробилки заполняется измельчаемым материалом. Система механизмов конструкции, включающая подвижный валок, наборы подвижных шарнирных продольных рычагов, пружины вертикальных пружинных блоков, займет уже другое положение. В исходном положении устойчивость системы механизмов обеспечивается тем, что усилие сжатия вертикальных пружинных блоков через наборы рычагов удерживает подвижный валок, то есть это усилие, как минимум, должно быть пропорционально равно усилию дробления материала или иметь большую величину.
Недостатком вышеуказанной системы при работе известной валковой дробилки является то, что и в другом положении система может находиться в состоянии равновесия, несмотря на то, что усилие сжатия в пружинах вертикальных пружинных блоков увеличилось. При этом усилие сопротивления дроблению от материала, заполнившего увеличившийся зазор между валками, осталось практически постоянным. Для гарантированного возврата системы - подвижного валка в исходное положение потребуется установка в вертикальные пружинные блоки пружин с большим усилием, обеспечивающих усилие сжатия, превышающее усилие, которое может удерживать систему в равновесном состоянии при другом ее положении. Это создает определенные сложности при обеспечении работоспособности данной системы механизмов. Кроме того, эта система инерционна в работе, в результате чего происходит медленное возвращение подвижного валка дробилки в исходное положение после перегрузки, например, при попадании между валками недробимых включений материала.
Еще одним недостатком известной валковой дробилки является то, что ее конструкция не обеспечивает контроль над проведением процесса дробления и получением заданной фракции материала, не задерживая при этом недробимые включения и не останавливая процесс дробления для их удаления из зоны измельчения.
Задачей настоящего изобретения является расширение технологических возможностей валковой дробилки для резания губчатого титана и повышение эффективности работы за счет стабильного проведения в ней процесса измельчения материалов различной твердости и исключения попадания в конечный продукт измельченного материала недробимых включений.
Поставленная задача достигается тем, что валковая дробилка для резания губчатого титана, содержащая опорную раму, камеру резания с загрузочным бункером, размещенные в камере резания параллельно друг другу неподвижный и подвижный валки, установленные в неподвижных и подвижных подшипниковых корпусах соответственно, и силовые элементы упругого воздействия на валки, согласно изобретению снабжена сменными вставками, расположенными между неподвижными и подвижными подшипниковыми корпусами валков, неподвижный и подвижный валки на посадочных местах их центральной части снабжены зубчатыми дисками, неподвижные и подвижные корпуса валков установлены на опорной раме с обеих сторон камеры резания, закреплены на ней крепежными элементами и стянуты между собой в верхней и нижней частях своих внешних боковых стенок сквозными горизонтальными стяжками с крепежными элементами, наружная боковая сторона каждого неподвижного подшипникового корпуса снабжена кронштейном с шарнирно закрепленным на нем захватом, выполненным в виде соединенных между собой осью с возможностью раздвижения относительно друг друга двуплечих рычагов с вертикальными опорными плечами, развернутыми вверх и вниз в противоположные стороны, и горизонтальными плечами с консольными хвостовиками, которые имеют контактирующие планки с цилиндрической наружной и прямоугольной внутренней поверхностями для размещения между ними съемного ручного гидравлического домкрата, в консольных хвостовиках горизонтальных плеч двуплечих рычагов смонтированы силовые элементы упругого воздействия на сквозные горизонтальные стяжки и подвижный валок, а каждый подвижный подшипниковый корпус выполнен с продольными пазами в основании и размещенными сверху основания с зазором прижимными планками, кроме того, валковая дробилка снабжена датчиками контроля положения горизонтальных плечей двуплечих рычагов захватов. Каждый силовой элемент упругого воздействия на валки выполнен в виде набора пакетов тарельчатых пружин, смонтированных сверху и снизу консольных хвостовиков горизонтальных плечей двуплечих рычагов захвата на общей вертикальной гильзе, расположенной в отверстиях консольных хвостовиков с зазором и зафиксированной на общей вертикальной оси крепежными элементами. Элементы датчика контроля положения горизонтальных плечей каждого захвата размещены один над другим на лицевых сторонах горизонтальных плечей.
Предложенная конструкция валковой дробилки позволяет расширить ее технологические возможности и повысить эффективность работы за счет обеспечения стабильного проведения в ней процесса измельчения губчатого титана и губчатого циркония различной твердости, других материалов со структурой большой твердости, а также исключить попадание в конечный продукт измельченого материала недробимых включений.
Это достигается благодаря взаимодействию системы механизмов, выполненной в виде неподвижного и подвижного валков, установленных в неподвижных и подвижных подшипниковых корпусах, стянутых между собой сквозными горизонтальными стяжками, расположенных между неподвижными и подвижными подшипниковыми корпусами сменных вставок, захватов с силовыми элементами упругого воздействия на валки и датчиков контроля положения горизонтальных плечей двуплечих рычагов захвата, а также благодаря предварительному нагружению пакетов тарельчатых пружин с помощью съемного гидравлического домкрата, что обеспечивает:
- стабильность процесса дробления с получением требуемой фракции материала с выдержкой заданного зазора между зубчатыми дисками валков дробилки, которая достигается тем, что вышеуказанная система механизмов противодействует своими усилиями распорным усилиям до 400 т, возникающим при резании материалов между зубчатыми дисками валков дробилки, а также контролирует заданный зазор и превышение заданных допустимых распорных усилий, например, при попадании между зубчатыми дисками валков недробимых включений,
- устойчивость положения подвижного валка только в исходном положении при дроблении материала заданной фракционной крупности,
- отключение привода дробилки и остановку вращения зубчатых дисков валков при попадании в материал недробимых включений,
- удаление недробимых включений из зоны резания материала за счет реверса зубчатых дисков,
- быстрое восстановление процесса дробления материала после снятия перегрузки с привода и быстрое возвращение подвижного валка в исходное положение,
- надежность работы шестерен неподвижного ведущего и подвижного ведомого валков за счет контроля толщиной сменных вставок межцентрового расстояния между шестернями.
Для пояснения изобретения ниже приводится конкретный пример выполнения изобретения со ссылкой на прилагаемые чертежи, на которых:
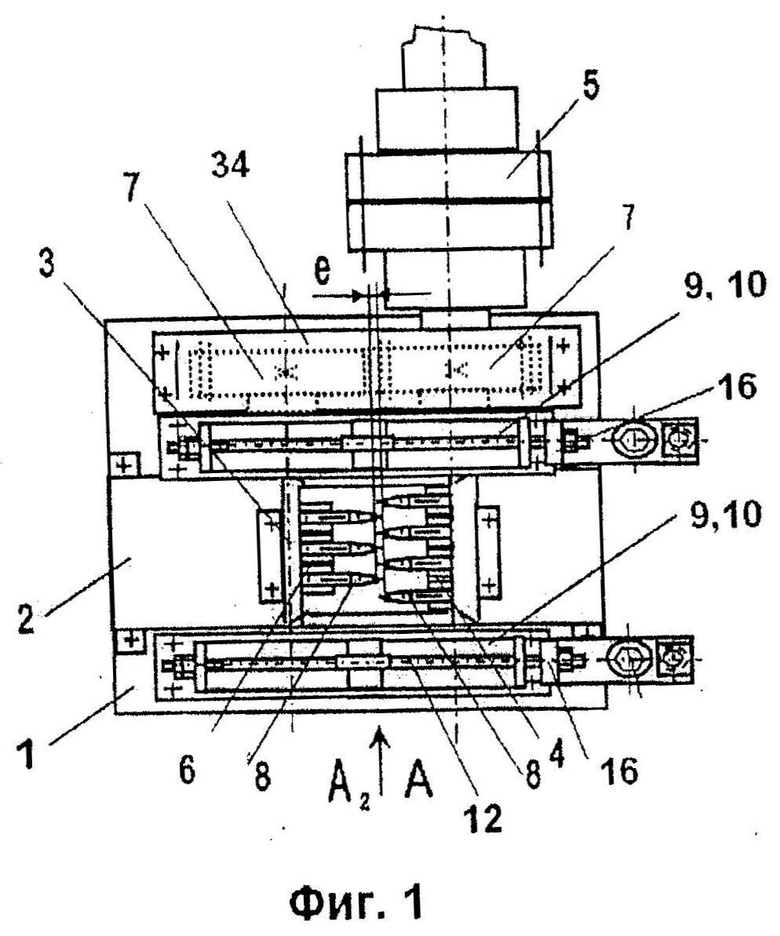
на фиг.1 изображена валковая дробилка для резания губчатого титана, вид в плане,
на фиг.2 - то же, вид по стрелке А, фронтальный вид,
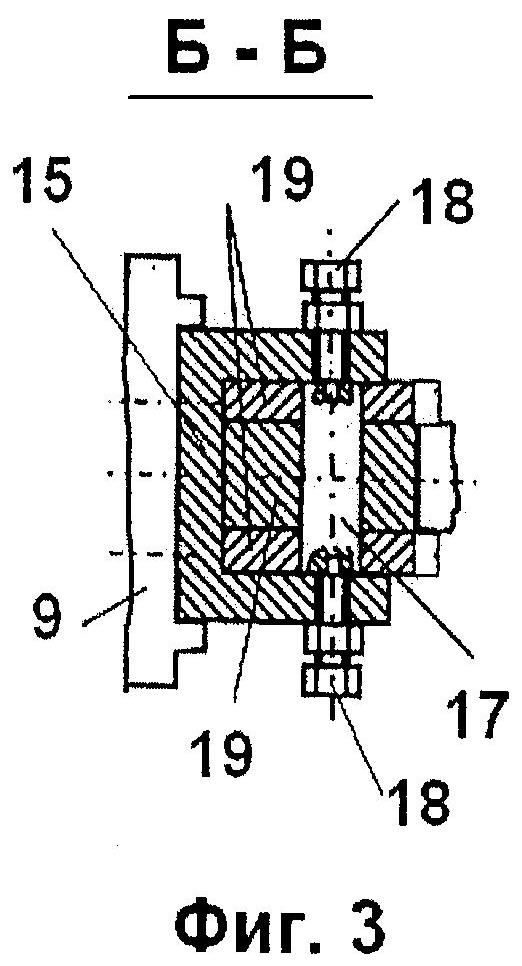
на фиг.3 - то же, разрез Б-Б на фиг 2, изображено место подсоединения одного из захватов к кронштейну, размещенному на наружной боковой стороне неподвижного подшипникового корпуса,
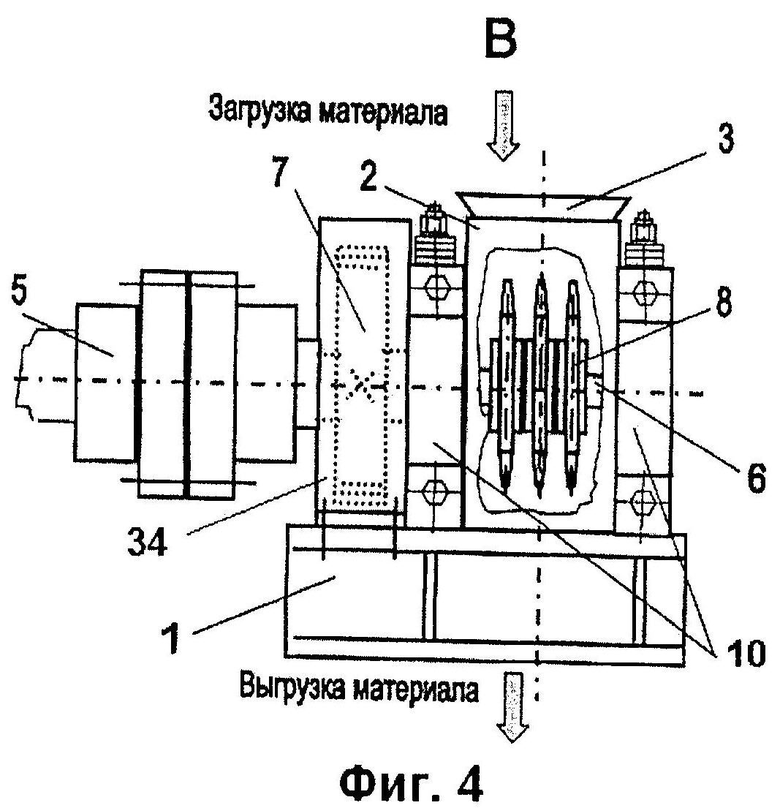
на фиг.4 - то же, вид по стрелке В на фиг.2, вид сбоку,
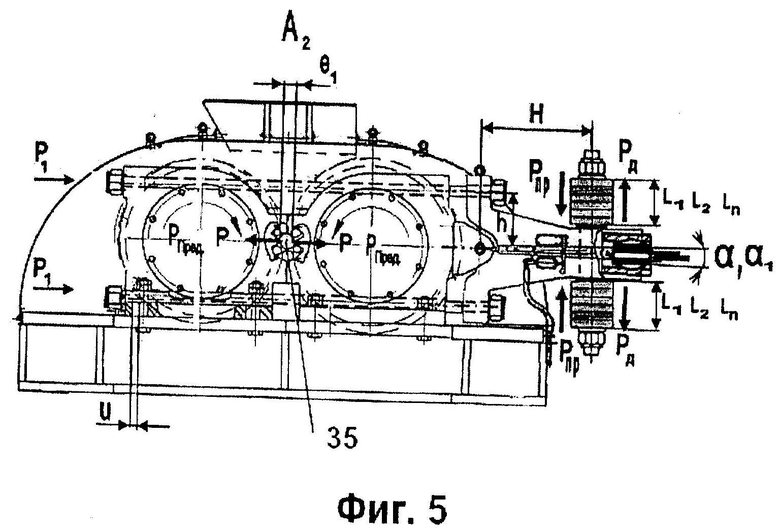
на фиг.5 - то же, вид по стрелке А2 на фиг.1, изображена схема сил нагружения сквозных горизонтальных стяжек и одного из подвижных подшипниковых корпусов от силового элемента упругого воздействия захвата на подвижный валок.
Валковая дробилка для резания губчатого титана содержит опорную раму 1 и камеру резания 2 с загрузочным бункером 3. В камере резания 1 параллельно друг другу смонтированы неподвижный ведущий валок 4, связанный с выходной муфтой 5 привода, и подвижный ведомый валок 6, взаимодействующий с неподвижным ведущим валком 4 через шестерни 7. Вращение неподвижного ведущего валка 4 осуществляется, например, от электродвигателя через редуктор и выходную муфту редуктора (привод дробилки не изображен).
Неподвижный 4 и подвижный 6 валки на посадочных местах их центральной части имеют зубчатые диски 8 и установлены в неподвижных 9 и подвижных 10 корпусах соответственно. Подшипниковые корпуса 9 и 10 расположены на опорной раме 1 с обеих сторон камеры резания 2, закреплены на ней крепежными элементами 11 рамы 1 и стянуты между собой в верхней и нижней частях своих внешних боковых стенок сквозными горизонтальными стяжками 12 с крепежными элементами 13.
Валковая дробилка снабжена также сменными вставками 14, расположенными между неподвижными 9 и подвижными 10 подшипниковыми корпусами валков 4, 6, определяющими заданный зазор между зубчатыми дисками 8 валков и контролирующими заданное межцентровое расстояние между шестернями 7 неподвижного ведущего валка 4 и подвижного ведомого валка 6.
Наружная боковая сторона каждого неподвижного подшипникового корпуса 9 снабжена кронштейном 15 с шарнирно закрепленным на нем захватом 16, выполненным в виде соединенных между собой осью 17 с фиксаторами 18 с возможностью раздвижения относительно друг друга двуплечих рычагов 19 с вертикальными опорными плечами 20, развернутыми вверх и вниз в противоположные стороны, и горизонтальными плечами 21 с консольными хвостовиками 22, на которых расположены контактирующие планки 23 с цилиндрической наружной и прямоугольной внутренней поверхностями для размещения между ними съемного ручного гидравлического домкрата 24.
В консольных хвостовиках 22 горизонтальных плеч 21 двуплечих рычагов 19 захватов 16 смонтированы силовые элементы 25 упругого воздействия на подвижные валки 6 через опорные плечи 20 рычагов 19 и сквозные горизонтальные стяжки 12.
Каждый подвижный подшипниковый корпус 10 выполнен с продольными пазами 26 в основании и размещенными сверху основания с зазором прижимными планками 27.
Валковая дробилка снабжена также датчиками 28 контроля положения горизонтальных плечей 21 двуплечих рычагов 19 захватов 16. Элементы датчика 28 контроля положения горизонтальных плечей каждого захвата 16 размещены один над другим на лицевых сторонах горизонтальных плечей 21.
Каждый силовой элемент 25 упругого воздействия на валки выполнен в виде набора пакетов 29 тарельчатых пружин (с возможностью размещения в пакетах достаточного количества пружин), смонтированных сверху и снизу консольных хвостовиков 22 горизонтальных плечей 21 двуплечих рычагов 19 захвата 16 на общей вертикальной гильзе 30, расположенной в отверстиях 31 консольных хвостовиков 22 с зазором и зафиксированной на общей вертикальной оси 32 крепежными элементами 33.
Шестерни 7 неподвижного 4 и подвижного 5 валков закрыты кожухом 34, закрепленным на опорной раме 1 крепежными элементами 11.
Подготовку валковой дробилки к работе осуществляют следующим образом.
Опорную раму 1 валковой дробилки монтируют на ее посадочное место в технологической линии. Камеру резания 2 дробилки с загрузочным бункером 3 размещают под загрузочным питателем или конвейером технологической линии. Перед началом работы технологической линии в дробилке сначала производят настройку основных элементов конструкции захватов 16 на дробление материала заданной крупности и твердости.
Настройку производят следующим образом.
Между контактирующими планками 23 консольных хвостовиков 22 двуплечих рычагов 19 каждого из захватов 16 поочередно устанавливают съемный ручной гидравлический домкрат 24, который своим усилием РД воздействует через контактирующие планки 23 и консольные хвостовики 22 на верхние и нижние наборы пакетов 29 тарельчатых пружин силового элемента 25 и сжимает их на общей вертикальной гильзе 30 до необходимых, заданных технологией усилий сжатия дробимых материалов размеров L1, L2 или Ln.
Наборы пакетов тарельчатых пружин с учетом заданных по технологии настройки перегрузок набирают необходимые усилия Рпр., воздействующие на консольные хвостовики 22 горизонтальных плечей 21 двуплечих рычагов 19, и, соответственно, на сами рычаги, которые проворачиваются относительно друг друга на угол α вокруг оси 17. Возникающий при этом люфт между крепежными элементами 13 сквозных горизонтальных стяжек 12 и вертикальными опорными плечами 20 двуплечих рычагов 19 устраняется затяжкой крепежных элементов 13, а горизонтальные плечи 21 двуплечих рычагов 19 занимают исходное положение, обеспечивая этим необходимое компенсирующее усилие P1. После этого съемный ручной гидравлический домкрат 24 удаляют из контактирующих планок 23 захвата 16. Одновременно с этим двуплечие рычаги 19 опорными плечами 20 воздействуют на концы сквозных горизонтальных стяжек 12, которые своими крепежными элементами 13 прижимают подвижный подшипниковый корпус 10 к сменной вставке 14 и неподвижному подшипниковому корпусу 9 с усилием P1 и тем самым устанавливают заданную величину зазора «е» между зубчатыми дисками 8 неподвижного ведущего 4 и подвижного ведомого 6 валков дробилки. При этом подвижный подшипниковый корпус 10 продольными пазами 26 своего основания перемещается по опорной раме 1 и затем фиксируется на ней в вертикальной плоскости с зазором, установленным прижимными планками 27 и элементами крепления 11 опорной рамы.
Горизонтальное перемещение подвижного подшипникового корпуса 10 в крайние положения «влево» или «вправо» возможно на величину хода «U», ограниченного размерами продольных пазов 26 его основания.
Исходной считается установка каждого подвижного подшипникового корпуса 10 на опорной раме 1 слева от сменной вставки 14 при левом расположении крепежных элементов 11 опорной рамы 1.
Работу валковой дробилки осуществляют следующим образом.
С питателя или конвейера технологической линии в камеру резания 2 валковой дробилки через загрузочный бункер 3 подают материал для измельчения. Включают привод и через муфту 5 начинают вращаться неподвижный ведущий валок 4, связанный с ним через шестерни 7 подвижный ведомый валок 6 и, соответственно, зубчатые диски 8 валков, которые начинают резать и измельчать подаваемый в загрузочный бункер 3 материал.
Распорному усилию Р, возникающему между зубчатыми дисками 8 валков при измельчении материала, противодействуют компенсирующие усилия P1, которые определяются формулой
P1=Pпр.·H/h,
Где Рпр. - усилия от тарельчатых пружин,
Н - плечо приложения усилий от тарельчатых пружин Рпр.,
h - плечо приложения компенсирующих усилий P1,
и передаются, как было указано выше, двуплечими рычагами 19 зажимов 16 от наборов пакетов 29 тарельчатых пружин через сквозные горизонтальные стяжки 12 подвижным подшипниковым корпусам 10 вместе с подвижным ведомым валком 6 для их удержания на опорной раме в исходном положении и обеспечения резания материалов требуемой крупности и твердости.
При попадании между дисками 8 валков недробимых фракций материала 35 валковая дробилка работает следующим образом.
Подвижные подшипниковые корпуса 10 получают нагрузку от предельного распорного усилия Рпред., возникающего между зубчатыми дисками 8 неподвижного 4 и подвижного 6 валков. Это усилие через крепежные элементы 13 сквозных горизонтальных стяжек 12 и вертикальные опорные плечи 20 рычагов 19 раздвигает их горизонтальные плечи 21 на угол α1, а консольные хвостовики 22 горизонтальных плечей сжимают наборы пакетов тарельчатых пружин 29. При превышении заданного распорного усилия Р до величины Рпред. зазор между зубчатыми дисками 8 может увеличиться до величины «e1» и подвижные подшипниковые корпуса 10 вместе с подвижным валком 6 сместятся при этом влево. На увеличение зазора между зубчатыми дисками 8 валков реагирует датчик 28 контроля положения горизонтальных плечей 21. Датчик срабатывает, отключает привод 5 дробилки и дает команду на реверс вращения зубчатых дисков 8 валков 4, 6 в обратном направлении. Дробилка останавливается для выяснения причин и (или) удаления недробимого материала из зоны измельчения материала. Тем самым производится контроль качества состава материала уже на стадии резания.
После выполнения данной операции и снятия перегрузки с привода дробилка снова готова к работе. Это происходит в результате быстрого возвращения подвижных подшипниковых корпусов 10 вместе с подвижным валком 6 обратно в исходное положение и восстановления заданного сменными вставками 14 зазора «е». Это достигается благодаря тому, что увеличившихся сил от сжатия тарельчатых пружин 28 в пакетах 29 всегда достаточно для быстрого воздействия двуплечих рычагов 19 захватов 16 через сквозные горизонтальные стяжки 12 на подвижные подшипниковые корпуса вместе с подвижным валком, так как предварительное нагружение тарельчатых пружин с помощью съемного ручного гидравлического домкрата происходит с учетом возможных перегрузок.
Предложенная конструкция валковой дробилки по сравнению с известными валковыми дробилками позволяет расширить ее технологические возможности и повысить эффективность работы за счет обеспечения стабильного проведения в ней процесса измельчения губчатого титана и губчатого циркония различной твердости, других материалов со структурой большой твердости, а также исключить попадание в конечный продукт измельченого материала недробимых включений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАЛКОВАЯ ДРОБИЛКА | 2012 |
|
RU2488446C1 |
| Валковая дробилка | 1985 |
|
SU1294375A1 |
| Валковая мельница | 1981 |
|
SU975065A1 |
| Двухвалковая дробилка | 1979 |
|
SU902805A1 |
| ДРОБИЛКА ВАЛКОВАЯ | 2017 |
|
RU2700633C2 |
| ВАЛКОВАЯ ДРОБИЛКА | 2009 |
|
RU2403087C1 |
| ВАЛКОВЫЙ ИЗМЕЛЬЧИТЕЛЬ | 1992 |
|
RU2031710C1 |
| Валковая дробилка | 1990 |
|
SU1706692A1 |
| Среднеходная мельница | 1985 |
|
SU1301488A1 |
| Валковая дробилка | 1972 |
|
SU473517A1 |
Изобретение относится к валковым дробилкам для переработки губчатого титана и губчатого циркония. Валковая дробилка содержит опорную раму (1) и камеру резания с загрузочным бункером. В камере резания параллельно друг другу размещены неподвижный и подвижный валки с зубчатыми дисками, установленные соответственно в неподвижные (9) и подвижные (10) подшипниковые корпуса. Подшипниковые корпуса (9), (10) размещены на опорной раме (1) и стянуты сквозными горизонтальными стяжками (12). Между подшипниковыми корпусами (9), (10) расположены сменные вставки (14), определяющие зазор и контролирующие межцентровое расстояние. На наружной боковой стороне неподвижного подшипникового корпуса (9) размещен кронштейн (15) с шарнирно закрепленным на нем захватом (16). Каждый захват (16) выполнен в виде соединенных с возможностью раздвижения относительно друг друга рычагов, имеющих вертикальные опорные (20) и горизонтальные (21) плечи с консольными хвостовиками (22). На консольных хвостовиках (22) расположены контактирующие планки (23) для размещения съемного ручного гидравлического домкрата. В консольных хвостовиках (22) установлены силовые элементы (25) упругого воздействия на подвижные валки в виде набора пакетов тарельчатых пружин (29). Валковая дробилка снабжена датчиками контроля положения горизонтальных плечей двуплечих рычагов захватов. Изобретение расширяет технологические возможности валковой дробилки, позволяет повысить эффективность работы валковой дробилки за счет стабильного измельчения материалов различной твердости и исключения попадания недробимых включений в конечный продукт. 2 з.п. ф-лы, 5 ил.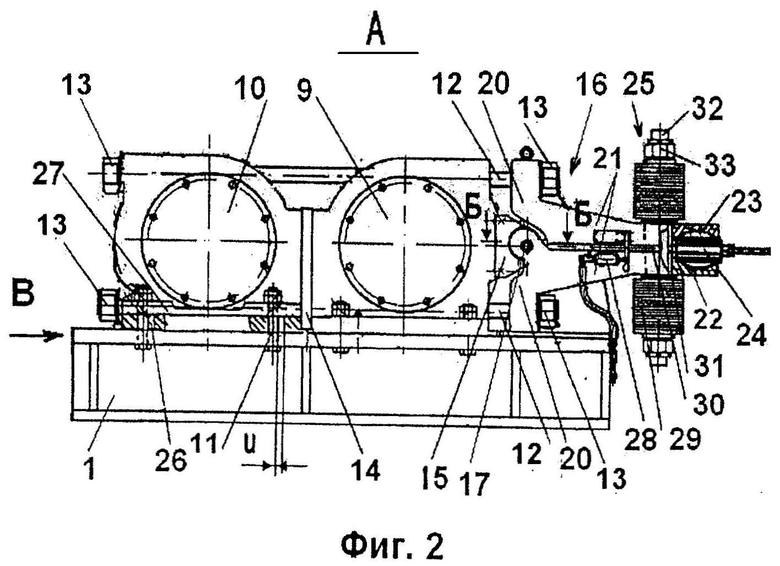
1. Валковая дробилка для резания губчатого титана, содержащая опорную раму, камеру резания с загрузочным бункером, размещенные в камере резания параллельно друг другу неподвижный и подвижный валки, установленные в неподвижных и подвижных подшипниковых корпусах соответственно, и силовые элементы упругого воздействия на валки, отличающаяся тем, что она снабжена сменными вставками, расположенными между неподвижными и подвижными подшипниковыми корпусами валков, неподвижный и подвижный валки на посадочных местах их центральной части снабжены зубчатыми дисками, неподвижные и подвижные корпуса валков установлены на опорной раме с обеих сторон камеры резания, закреплены на ней крепежными элементами и стянуты между собой в верхней и нижней частях своих внешних боковых стенок сквозными горизонтальными стяжками с крепежными элементами, наружная боковая сторона каждого неподвижного подшипникового корпуса снабжена кронштейном с шарнирно закрепленным на нем захватом, выполненным в виде соединенных между собой осью с возможностью раздвижения относительно друг друга двуплечих рычагов с вертикальными опорными плечами, развернутыми вверх и вниз в противоположные стороны, и горизонтальными плечами с консольными хвостовиками, которые имеют контактирующие планки с цилиндрической наружной и прямоугольной внутренней поверхностями для размещения между ними съемного ручного гидравлического домкрата, в консольных хвостовиках горизонтальных плеч двуплечих рычагов смонтированы силовые элементы упругого воздействия на сквозные горизонтальные стяжки и подвижный валок, а каждый подвижный подшипниковый корпус выполнен с продольными пазами в основании и размещенными сверху основания с зазором прижимными планками, кроме того, валковая дробилка снабжена датчиками контроля положения горизонтальных плечей двуплечих рычагов захватов.
2. Валковая дробилка по п.1, отличающаяся тем, что каждый силовой элемент упругого воздействия на валки выполнен в виде набора пакетов тарельчатых пружин, смонтированных сверху и снизу консольных хвостовиков горизонтальных плечей двуплечих рычагов захвата на общей вертикальной гильзе, расположенной в отверстиях консольных хвостовиков с зазором и зафиксированной на общей вертикальной оси крепежными элементами.
3. Валковая дробилка по п.1, отличающаяся тем, что элементы датчика контроля положения горизонтальных плечей каждого захвата размещены один над другим на лицевых сторонах горизонтальных плечей.
| US 5060874 A1, 29.10.1991 | |||
| 0 |
|
SU190241A1 | |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАБОЧЕГО ЗАЗОРА МЕЖДУ ВАЛЬЦАМИ МЕЛЬНИЧНОГО ВАЛЬЦОВОГО СТАНКА | 2003 |
|
RU2273519C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ГЕНЕТИЧЕСКИ ДЕТЕРМИНИРОВАННЫХ ЗАБОЛЕВАНИЙ ЧЕЛОВЕКА | 2006 |
|
RU2293990C1 |
| ВАЛКОВЫЙ ИЗМЕЛЬЧИТЕЛЬ | 1992 |
|
RU2031710C1 |
| ДРОБИЛКА ДЛЯ РЕЗАНИЯ БЛОКОВ ГУБЧАТОГО ТИТАНА | 2010 |
|
RU2428255C1 |

