Изобретение относится к приборостроению и предназначено для использования в средствах поверки и градуировки линейных акселерометров.
известны способы определения ам- 5 плитудно-частотной характеристики (АЧХ) акселерометров с применением вращающихся, либо качающихся в гравитационном поле Земли платформ C1D.10
Недостатком этих способов является наличие погрешности определения АЧХ из-за неточного знания положегшя центра масс чувствительного элемента акселерометра.15
Известен способ определения АЧХ акселерометра, включающий воспроизведение линейных гармонических ускорений путем задания угловых колебаний акселерометру в гравитацион- 20 ном поле Земли с заданной частотой
,. , .
и амплитудой, измерение амплитуд выходного сигнала акселерометра и угловых колебаний, вычисление поправки к ускорению и АЧХ С27.
При применении этого способа |Врзникает существенная погрешность |из-за неточного знания расстояния Меязду осью колебаний и центром масс чувствительного элемента акселеромет-30 ра (эквивалентно величине R + г, в С23) из-за большой погрешности указания положения центра масс в технической документации на акселерометр .35
Целью изобретения является повыщение точности определения АЧХ.
Указанная цель достигается тем, что согласно способу определения АЧХ акселерометра, включающему 40 воспроизведение линейных гармонических ускорений путем задания угловьк колебаний акселерометру в гравитационном поле Земли с заданной частотой и амплитудой, измерение ам- 45 плитуд выходного сигнала акселерометра и угловых колебаний, вычисление поправки к ускорению и амплитудно-частотной характеристики,прёдвдрительно изменяют частоту колебаний 50 акселерометра, фиксируют величину частоты, при которой значение выходного гармонического сигнала акселерометра обращается в нуль, а расстояние . между осью угловых колебаний 55 и центром чувствительного элемента акселерометра, от которого зависит поправка, вычисляют по формуле
- ускорение свободного падения;
- частота при нулевом выходном сигнале.
На акселерометр, качающийся в гравитационном поле Земли, действует ускорение с амплитудой
, (1Г
где % - амплитуда угловых колебаний
Из формулы (1) следует, что в.оздействующее на акселерометр ускорени состоит из двух составляющих: пропорциональной углу колебаний акселерометра и зависящей от частоты колебаний и величиныЕ,
Первая составляющая известна, так как известна амплитуда угловых колебаний. Вторая составляющая должна быть вычислена в виде поправки, дпя вычисления которой необходимо знать частоту колебаний и величину t . Частота колебаний обычно известна с высокой степенью точности,а величина С требует уточнения.
Если предварительно плавно изменять частоту uJ и зафиксировать величину частоты х)о при которой значение воздействующего ускорения обращается в нуль, то из формулы (1) получим
(2) f.--°
-
Учитьшая, что вькодной сигнал акселерометра пропорционален воздействующему ускорению, достаточно зафиксировать значение частоты при котором выходной сигнал акселерометра обращается в нулЬ.
.Затем АЧХ Н (и)) определяют как отношение амплитуд вькодного сигнала акселерометра Ujn и воздействующего ускоре.ния, вычисляемого по формуле (1) при различных значениях .частот колебаний
(3)
Ufr,
cj) :
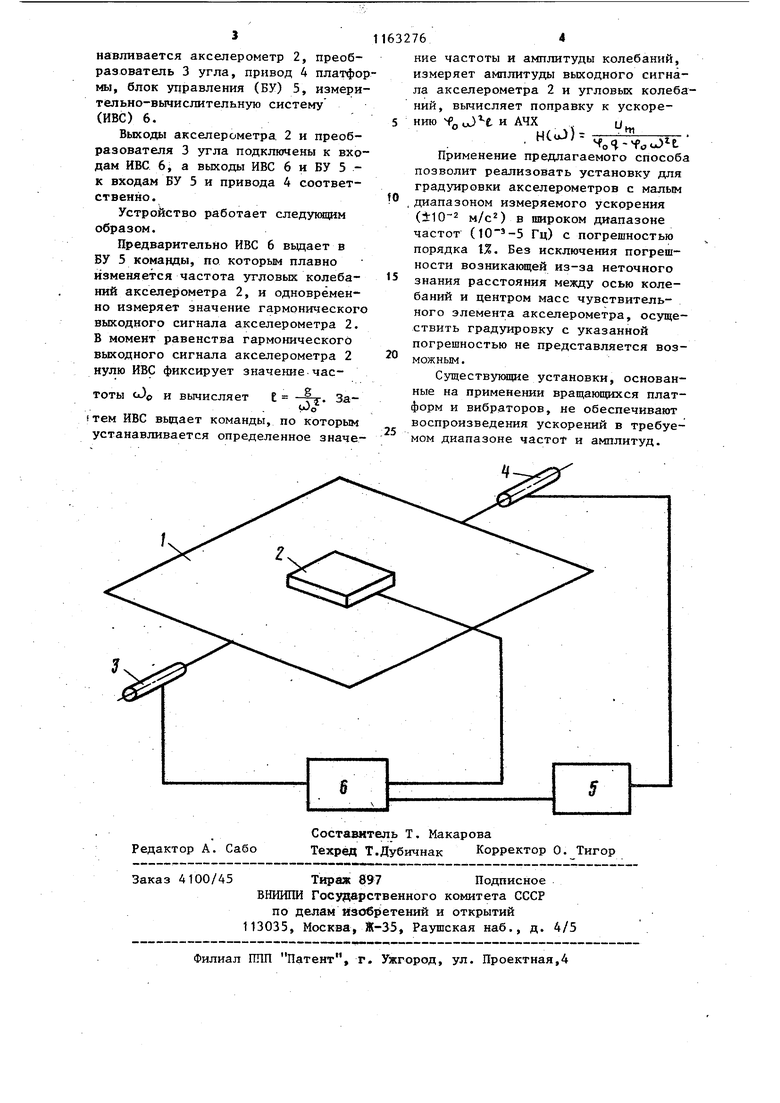
На чертеже приведена принципиальная схема устройства для реализаций предлагаемого способа.
Устройство содержит горизонтальную платформу 1, на которую уста
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки линейных акселерометров | 1984 |
|
SU1312489A1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| СПОСОБ ГРАДУИРОВКИ ПЪЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА НА НИЗКИХ ЧАСТОТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2519833C2 |
| Способ абсолютных измерений гравитационного поля на подвижном объекте | 2019 |
|
RU2704545C1 |
| Бесплатформенная инерциальная навигационная система для высокоскоростного маневренного объекта | 2017 |
|
RU2674572C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550161C1 |
| Способ градуировки низкочастотных линейных акселерометров | 1987 |
|
SU1540494A1 |
СПОСОБ ОПРЕДЕЛЕЕЩЯ АМППИТУДНО-ЧАСТОТНОЙ ХАРАКТЕРИСТИШ АКСЕЛЕРОМЕТРА, включающий воспрои;зведе- . ние линейных гармонических ускоре- t НИИ путем задания угловых колебаний акселерометру в гравитационнсм поле Зв№Ш с заданной частотой и амплитудой, измерение амплитуд выходного сигнала акселерометра и угловых колебаний, вычисление iпоправки к ускорению и амплитудночастотной характеристики, о т л ичающийся тем, что, с целью повышения точности, предварительно изменяют частоту колебаний акселерометра, фиксируют величину частоты, при которой значение выз одного гармонического сигнала акселерометра обращается в нуль, а расстояние t между осью угловых колебаний и центром чувствительного элемента акселерометра, от которого зависит поправка, вычисляют по формуле (Л I и/о где { - ускорение свободного падения, и)- частота при нулевом выходном сигнале.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Низкочастотные линейные акселерометры | |||
| Методы и средства поверки и градзпировки | |||
| М., Изд-во стандартов, 1979 | |||
| с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для воспроизведения постоянных и низкочастотных гармонических линейных ускорений | 1978 |
|
SU731383A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
