Область техники
Изобретение относится к области автоматики и систем автоматического управления и регулирования. В частности к электроприводам, включающим в свой состав механическую передачу и предназначенным для прецизионной отработки низких угловых скоростей.
Уровень техники
На сегодняшний день существует несколько типов электроприводов, предназначенных для отработки угловых, в том числе и малых, скоростей.
Для реализации «классического» скоростного электропривода используется тахогенератор. Однако тахогенераторы имеют нелинейную характеристику в области малых скоростей и подвержены электромагнитным помехам, что может привести к некачественному регулированию или неустойчивой работе электропривода, так как величина полезного выходного сигнала может быть сравнима с величиной уровня шума [1].
Скоростной контур регулирования электропривода можно организовать, используя оптический датчик угла с высокой разрешающей способностью (23-26 разрядов в двоичном цифровом коде). Высокая разрядность таких датчиков позволяет использовать их для прецизионной оценки угловой скорости объекта управления и исключить необходимость применения тахогенераторов. Поэтому во многих задачах управления прослеживается тенденция к использованию в системе одного вида датчика обратной связи - углового [2]. Однако, большие габариты и масса оптических датчиков делает затруднительным их использование в системах, к габаритно-массовым характеристикам которых предъявляются жесткие требования.
Известен электропривод, в котором используется способ замыкания контура регулирования, основанный на сравнении проинтегрированной заданной угловой скорости и текущего значения углового положения объекта управления [1, 3]. Преимуществом данного электропривода является возможность отработки угловой скорости объекта управления, в том числе и малой, без использования датчика углового положения с высокой разрешающей способностью.
Недостатком данного электропривода является то, что чувствительность электропривода определяется чувствительностью датчика углового положения. При необходимости повышения чувствительности отработки задаваемой угловой скорости, в свою очередь, требуется повышение разрядности датчика углового положения, что отрицательно сказывается на экономических и габаритно-массовых параметрах электропривода.
Известен электропривод, содержащий датчик углового положения, расположенный на оси ротора двигателя [4]. При замыкании контура регулирования, основанного на сравнении проинтегрированной заданной угловой скорости, приведенной к ротору двигателя, и текущего значения углового положения ротора двигателя, можно получить повышение чувствительности отработки задаваемой угловой скорости. Недостатком такого электропривода является наличие не охваченных контуром регулирования части элементов конструкции - механической передачи и объекта управления. Вследствие этого, в создаваемую угловую скорость вращения объекта управления будет вноситься погрешность, обуславливаемая нежесткостью конструкции элементов электропривода, люфтом и несоосностью механической передачи.
Целью предлагаемого изобретения является повышение качества отработки и регулирования малых значений задаваемых угловых скоростей объекта управления путем компенсации погрешности, вносимой несоосностью механической передачи, в случае, когда контур обратной связи замкнут по угловому положению ротора двигателя.
Сущность изобретения
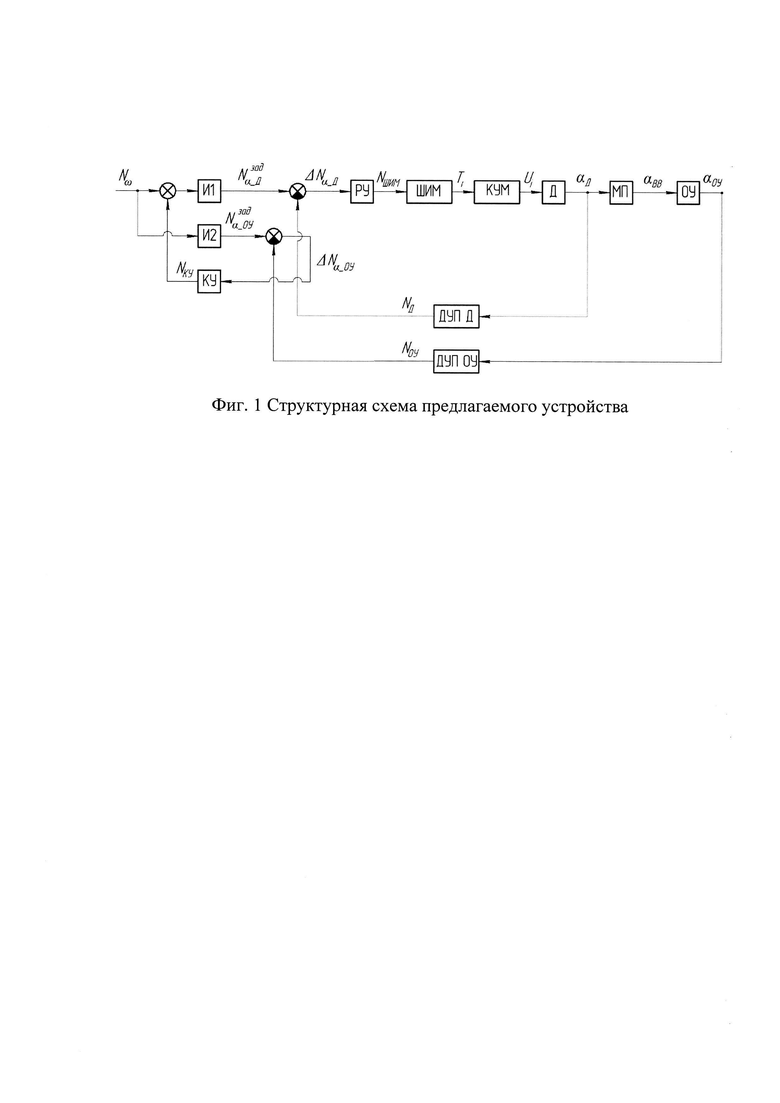
В предлагаемом устройстве размещаются два датчика углового положения - по осям вращения объекта управления и ротора двигателя. Структурная схема предлагаемого электропривода представлена на фиг. 1, где И1 и И2 - интеграторы угловой скорости по осям вращения ротора двигателя и объекта управления, соответственно; РУ - регулятор углового положения; ШИМ - широтно-импульсный модулятор; КУМ - ключевой усилитель мощности; Д - двигатель; МП - механическая передача; ОУ - объект управления; ДУП ОУ - датчик углового положения объекта управления; ДУП Д - датчик углового положения ротора двигателя; КУ - корректирующее устройство; Nω - задаваемый код угловой скорости объекта управления;  - расчетный код углового положения объекта управления;
- расчетный код углового положения объекта управления;  - расчетный код углового положения ротора двигателя; ΔNα_ОУ - сигнал рассогласования контура углового положения объекта управления; ΔNα_Д - сигнал рассогласования контура углового положения ротора двигателя; NШИМ - входное значение кода ШИМ; Ti - сигналы, управляющие работой ключевого усилителя мощности; Ui - напряжения, подаваемые на фазы двигателя; αД - значение углового положения ротора двигателя; αВВ - значение углового положения выходного вала электропривода; αОУ - значение углового положения объекта управления; NОУ - значение измеренного углового положения объекта управления; NД - значение измеренного углового положения ротора двигателя; NКУ - выходной сигнал корректирующего устройства.
- расчетный код углового положения ротора двигателя; ΔNα_ОУ - сигнал рассогласования контура углового положения объекта управления; ΔNα_Д - сигнал рассогласования контура углового положения ротора двигателя; NШИМ - входное значение кода ШИМ; Ti - сигналы, управляющие работой ключевого усилителя мощности; Ui - напряжения, подаваемые на фазы двигателя; αД - значение углового положения ротора двигателя; αВВ - значение углового положения выходного вала электропривода; αОУ - значение углового положения объекта управления; NОУ - значение измеренного углового положения объекта управления; NД - значение измеренного углового положения ротора двигателя; NКУ - выходной сигнал корректирующего устройства.
Интеграторы угловой скорости И1 и И2 принимают задаваемый сигнал угловой скорости объекта управления Nω и формируют на своих выходах расчетные коды углового положения ротора двигателя  и объекта управления
и объекта управления  Сигнал NД датчика углового положения ротора двигателя ДУП Д, жестко закрепленного на оси вращения ротора двигателя, поступает на устройство сравнения, в котором вычисляется сигнал рассогласования контура углового положения ротора двигателя ΔNα_Д посредством сравнения выходного сигнала
Сигнал NД датчика углового положения ротора двигателя ДУП Д, жестко закрепленного на оси вращения ротора двигателя, поступает на устройство сравнения, в котором вычисляется сигнал рассогласования контура углового положения ротора двигателя ΔNα_Д посредством сравнения выходного сигнала  интегратора И1 с выходным сигналом NД датчика углового положения ротора двигателя ДУП Д.
интегратора И1 с выходным сигналом NД датчика углового положения ротора двигателя ДУП Д.
Вычисленный устройством сравнения сигнал рассогласования контура углового положения ротора двигателя ΔNα_Д поступает на вход регулятора углового положения РУ, осуществляющего коррекцию поступившего на его вход сигнала рассогласования. Структура РУ определяется в зависимости от требований назначения конкретного электропривода и предъявляемых к нему технических требований. Выходной сигнал РУ NШИМ подается на вход широтно-импульсного модулятора ШИМ, формирующего сигналы управления Ti ключевым усилителем мощности КУМ. В свою очередь, КУМ формирует напряжения Ui для каждой фазы двигателя Д, который через механическую передачу МП связан с объектом управления ОУ.
На оси вращения объекта управления также жестко закреплен датчик углового положения ДУП ОУ, формирующий, в зависимости от углового положения объекта управления αОУ, сигнал NОУ. Данный сигнал поступает на устройство сравнения, в котором вычисляется сигнал рассогласования контура углового положения объекта управления ΔNα_ОУ посредством сравнения выходного сигнала  интегратора И2 с выходным сигналом NОУ датчика углового положения объекта управления ДУП ОУ.
интегратора И2 с выходным сигналом NОУ датчика углового положения объекта управления ДУП ОУ.
Вычисленный сигнал рассогласования ΔNα_ОУ поступает на вход корректирующего устройства КУ, оценивающего сигнал рассогласования ΔNα_ОУ и формирующего, в зависимости от его величины, выходной сигнал NКУ, с помощью которого осуществляется коррекция задаваемого сигнала угловой скорости объекта управления Nω.
Подобное построение системы управления электропривода позволяет существенно снизить погрешность отработки малых угловых скоростей объекта управления, вызванной наличием несоосности механической передачи, в случае, когда контур обратной связи замкнут по угловому положению ротора двигателя.
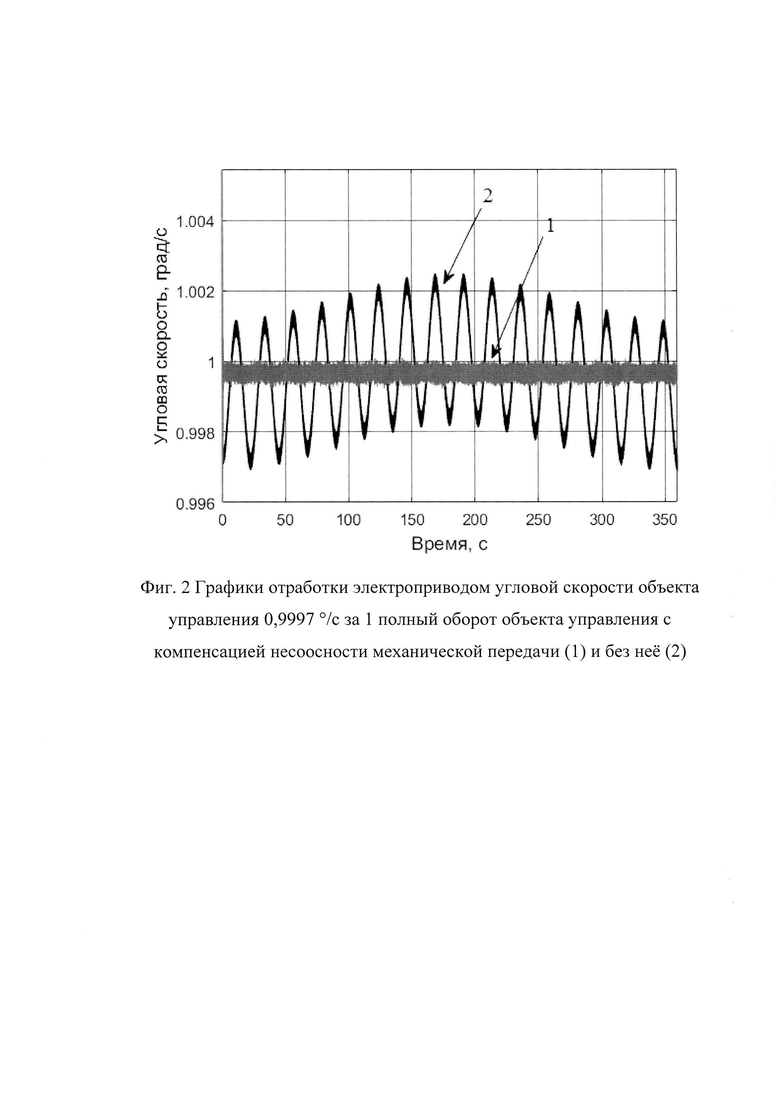
На фиг. 2 представлены графики отработки угловой скорости объекта управления 0,9997 °/с за один полный оборот объекта управления при замыкании контура обратной связи по угловому положению ротора двигателя электроприводом с компенсацией несоосности механической передачи (1) и электроприводом, в котором влияние на угловую скорость данной несоосности не компенсируется (2). Сравнивая приведенные графики, можно сделать выводы о том, что погрешность отработки данной скорости, в предлагаемом электроприводе значительно ниже, чем в электроприводе без компенсации несоосности механической передачи.
Таким образом, предлагаемое устройство с усовершенствованной системой управления электропривода посредством введения компенсации несоосности механической передачи при замыкании контура обратной связи по угловому положению ротора двигателя обладает новизной, практической полезностью и технической реализуемостью и может найти широкое применение в технике, например в исполнительных электроприводах силовых гироскопических комплексов, устройств поворотных солнечных батарей, телескопических и ретрансляционных систем космических аппаратов.
Литература
1. Джукич Д.Й., Положенцев Д.С. Организация систем управления угловой скоростью с помощью индукционных датчиков угла // Молодежь. Техника. Космос: труды VI Общероссийской молодежной науч.-техн. конф./ Балтийский государственный технический университет.- СПб.; 2014. С. 185-186.
2. Садовников М.А. Измерение скорости движения силового электропривода с помощью оптических датчиков угла // Изв. Вузов. Приборостроение 2008. Т. 51, №6. С. 52-57.
3. Трахтенберг P.M. Импульсные астатические системы электропривода с дискретным управлением./ P.M. Трахтенберг // М.: Энергоиздат, 1982. - 168 с.
4. Джукич Д.Й., Положенцев Д.С. Унифицированный исполнительный электропривод поворотного устройства солнечной батареи // Электронные и электромеханические системы и устройства: XIX науч.-техн. конф. (Томск, 16-17 апр. 2015 г.)/ АО «НПЦ «Полюс». - Томск, 2015. - 360 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД С ПОВЫШЕННОЙ ЧУВСТВИТЕЛЬНОСТЬЮ К ОТРАБОТКЕ МАЛЫХ УГЛОВЫХ СКОРОСТЕЙ ВРАЩЕНИЯ | 2018 |
|
RU2707578C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ МОМЕНТОМ ДВИГАТЕЛЯ-МАХОВИКА | 2012 |
|
RU2521617C2 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПО ЦИФРОВОЙСИСТЕМЕ | 1971 |
|
SU302797A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
Изобретение относится к электротехнике. Технический результат заключается в повышении качества отработки и регулирования малых угловых скоростей объекта управления путем компенсации погрешности, вызванной несоосностью ротора двигателя и объекта управления, в случае, когда контур обратной связи замкнут по угловому положению ротора двигателя. Низкоскоростной прецизионный электропривод с компенсацией влияния несоосности механической передачи содержит интеграторы угловой скорости, последовательно соединенные регулятор углового положения, широтно-импульсный модулятор, усилитель мощности, двигатель, который через механическую передачу связан с объектом управления, и датчики углового положения, расположенные по осям двигателя и объекта управления. В состав электропривода введено корректирующее устройство, на вход которого поступает оценивающийся им в дальнейшем сигнал рассогласования угла по оси объекта управления. А выход корректирующего устройства соединен с сумматором, в котором выходной сигнал корректирующего устройства складывается с сигналом задаваемой угловой скорости, тем самым осуществляя его корректировку с учетом параметров несоосности механической передачи. Далее измененный задаваемый сигнал угловой скорости поступает на интегратор угловой скорости ротора двигателя. 2 ил.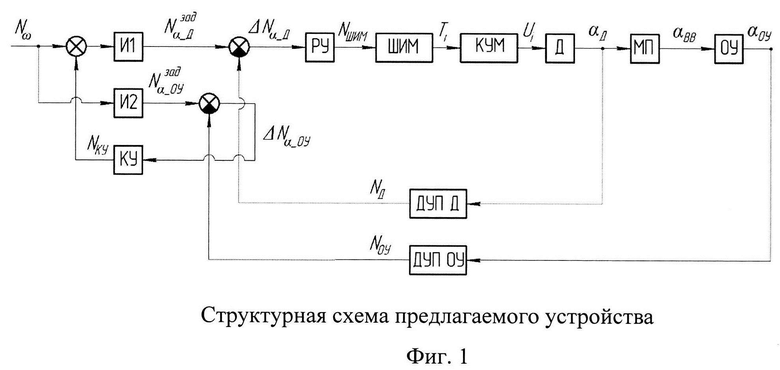
Низкоскоростной прецизионный электропривод с компенсацией влияния несоосности механической передачи, содержащий интеграторы угловой скорости, последовательно соединенные регулятор углового положения, широтно-импульсный модулятор, усилитель мощности, двигатель, который через механическую передачу связан с объектом управления, и датчики углового положения, расположенные по осям двигателя и объекта управления, отличающийся тем, что с целью снижения влияния несоосности механической передачи на создаваемую угловую скорость объекта управления, в случае замыкания контура обратной связи по угловому положению ротора двигателя, в состав электропривода введено корректирующее устройство, на вход которого поступает оценивающийся им в дальнейшем сигнал рассогласования угла по оси объекта управления, а выход которого соединен с сумматором, в котором выходной сигнал корректирующего устройства складывается с сигналом задаваемой угловой скорости, тем самым осуществляя его корректировку с учетом параметров несоосности механической передачи, после чего измененный задаваемый сигнал угловой скорости поступает на интегратор угловой скорости ротора двигателя.
| ЭЛЕКТРОПРИВОД С ПОВЫШЕННОЙ ЧУВСТВИТЕЛЬНОСТЬЮ К ОТРАБОТКЕ МАЛЫХ УГЛОВЫХ СКОРОСТЕЙ ВРАЩЕНИЯ | 2018 |
|
RU2707578C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2520351C1 |
| US 6771032 B2, 03.08.2004 | |||
| Способ определения коэффициентов массопередач при абсорбции паров этилового спирта водой | 1960 |
|
SU138407A1 |

