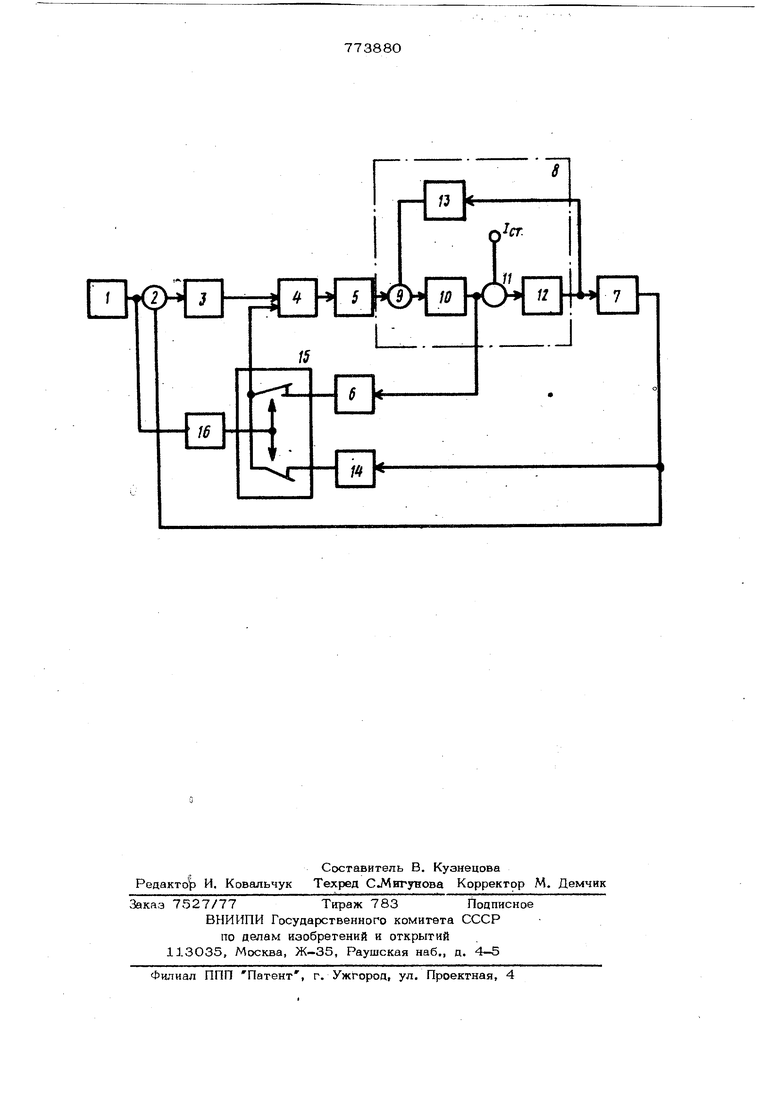
Изобретение относится к электротехнике к .может быть использовано в широкорегулируемых и следящих электроприводах постоянного тока. Известен электропривод постоянного тока, содержащий последовательно соединенные узел сравнения, усилитель, двигатель, тахогенератор и дифференцирующе звено обратной связи по частоте вращения P.J . Недостатком такого электропривода является повышенный уровень помех, вно- .симый каналом обратной связи на средних и больших частотах вращения. Известен также электропривод постоян ного тока с двухконтурной структурой, в которой контур тока подчинен контуру частоты вращения, содержащий последовательно соединенные узел сравнения, регулятор частоты вращения, регулятор тока, импульсный усилитель мощности, двигатель постоянного тока, тахопенератор, выход которого подсоединен к узлу сравнения 2. Нед(х:татком такого электропривода вляется низкая жестк(к:ть механических характеристик и низкое быстродействие, частности большая длительность проесса реверса ftpu нагружении сухим тре- ием, на инфранизких (менее О,1 с ) астотах вращения. Наиболее близким по технической сущности к предложенному является электро- привод постоянного тока, содержащий за- датчик частоты вращения, регулятор частоты вращения с передаточной функцией WpuB . регулятор тока с передаточной функцией Крт , усилитель мощности с передаточной функцией , датчик тока с коэ()фициентом К т тахогенератор с коэффициентом электродвигатель постоянного тока независимого возбуждения, который можно представить в виде звеньев, передатошые функции которых WRp . ЗД1. TgpM TTfT где Та - электромагнитная постоянная времени якорной цепи электродвигателя;Тд .. электромеханическая постоянная времени двигателя; Rrt - суммарное сопротивление якорной цепи; коэффициент пропорциональности между ЭДС. Е и частотой вращения SI, ± Е эрИ Р( (..ib гдеТ(3 (5 постоянные времени токо вого контура. Недостатком данного электропривода является низкая жесткость механических характеристик и больщая длительность процесса реверса при нагружении сухим грением на инфранизких частотах, ;обусловленная наличием слагаемого в числителе передаточной функции ). Цель - повышение жесткости механических характеристик и быстродействия электропривода при малых частотах вра, щения. Цель достигается тем, что в известный электропривод посточнного тока, содержащий последовательно соединенные задатчик частоты вращения, регулятор частоты вращения, регулятор тока, импульсный усилитель мощности, двигатель постоянного тока, тахогенератор, выход которого подключен к регулятору частоты вращения, и датчик тока якоря, выход которого подключен ко входу регулятора тока, вввдейы дифференцирующее звено обратной связи по частоте вращения, широтяо-импульсный модулятор и переключающий элемент с йсполнитеутьными цепями, включенными между выходами датчиков тока и дифференцирующего звена и входом регулятора тока, при этом дифференцирующее звено подключено к тахогенёратору, ко входу широтно-имульсного модулятора подключен выход за датчика. 10 15 Частота вращения в изображениях по Лапласу для замкнутой системы описывается следующим равенством a(p)Wy(p).U3(p)-Wj(p).3,(pl,: W (р - передаточная функция замкнутой системы по управляющему воздействию; W|(p) - передаточная функция замк нутой системы по возмущающему воздействию; - задающий сигнал; 3j;(p) - возмущение по нагрузке. В двухконтурной системе с обратной связью по току и пропорциональным регулятором тока передаточная функция по возмущению ,3ip) а к его выходу - управляющий вход переключающего элемента. Соответствующим расчетом параметров дифференцирующего звена обратной связи по частоте вращения обеспечивается равенство перецаточных функцийWyfp) для системы с жесткой обратной связью по току и для системы с гибкой обратной связью по частоте вращения. При атом Wk {р)в системе с гибкой обратной связью по частоте вращения получается существенно меньше нз-аа отсутствия в числи-- k: W теле слагаемого р рт стигается повышение жесткости механических характеристик и быстродействия на инфранизких частотах вращения. На чертежа приведена структурная схема предложенного электропривода постоянного тока. Электропривод содержит задатчик 1 частоты вращения, узел 2 сравнения, регулятор 3 частоты вращения, регулятор 4 тока, усилитель 5 мощности, датчик 6 тока, тахогенератор 7 и электродвигатель 8 постоянного тока, условно представленный в виде звеньев, сумматора 9, апериодического звена с постоянной времени якорной цепи 1О, второго сумматора 11, интегрирующего звена 12 с электромеханической постоянной времени, усилительного звена 13 с коэффициентом усиленияJравным отношению противоЭДС двигателя к частоте вращения. Кроме того, электропривод содержит дифференцирующее звено 14, переключаю щий элемент 15 с исполнительными цепя ми для коммутации в противофазе выходов датчика тока и дифференцирующего звена со входом регулятора тока и широ но-«мпульсный модулятор 16. Электропривод работает следующим образом. При сигнале задатчика 1, меньшем зоны нечувствительности широтно-импуль сного модулятора 16, ко входу регулятора 4 тока подключен выход дифференциру ющего звена 14. При сигнале задатчика 1, соответствующем скважности модулятора 16, равной , на вход регулятора 4 тока поступает сигнал с выхода датчика 6 тока, т. е. имеет место рассмотренная выше система с жесткой отрицательной обратной связью по току. При скважности модулятора, меньшей 1, но большей О, происходит поочередное подключение выходов датчика тока 6 и дифференцирующего звена 14 ко входу регулятора 4 тока. Величина зоны нечувствительности и зоны регулирования модулятора 16 определяется уровнем помехозащищенности основного канала, так как с увеличением частоты вращения в системе с гибкой связью по частоте вращения увеличивается уровень помех, вносимых в основной канал трактом обратной связи. Поскольку в момент переключения узла 15 возникает бросок тока якоря вслед ствие различия передаточных функций по возмущению при разных видах обратной связи, переключение производится широтно импульсным модулятором с высокой частотой модуляции и с плавным измене- |нием скважности в функции сигнала задат- чика. ормула изобретения Электропривод постоянного тока, содержащий последовательно соединенные задатчик частоты вращения, регулятор частоты вращения и регулятор тока с подключенными к их входам соответственно датчиками частоты вращения и тока, импульсный усилитель мощности и электродвигатель постоянного тока; отличающийся тем, целью повышения жесткости механических характеристик и быстродействия электропривода, в него введены аифференцир5тощее звано, широтно-импульсный модулятор и переключающий элемент, исполнительные которого включены между входом регулятора тока и выходами датчика тока и дифференцирующего звена, которое подключено к датчику частоты вращения, при этом вход широтно-импульсного модулятора подключен к выходу задатчнка, а выход - к управляющему входу переключающего элемента. Источники информации, принятые во внимание при экспертизе 1.Электромашинные средства автоматики. Под ред. Ю. К. Васильева, Киев, 1975, с. 69-74, рис. в. 2.Лебедев Е. Д и др. Унифицированные блочные системы регулирования электроприводов. Информстандартэлектро, 3.Динамика вентильного электропривода постоянного тока. Под ред. А. Д. Поздеева, М., Энергия, 1975, с. 125.
HzN
IS
16
Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный электропривод постоянного тока | 1977 |
|
SU736321A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1981 |
|
SU1066012A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157327C1 |
| Электропривод постоянного тока | 1979 |
|
SU917291A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Электропривод постоянного тока | 1989 |
|
SU1661954A1 |
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 2004 |
|
RU2280315C2 |