Изобретение относится к грейферным транспортирующим устройствам многопозиционных процессов, преимущественно к КГШП (кривошипный горячештамповочный пресс).
Исторически первыми грейферными подачами были грейферные линейки, приводимые в движение одним электродвигателем с помощью сложных кинематических цепей [Пат. США №3771669, Н. кл. 214-IBB, В65д 25/04 - грейферный узел многофункционального подающего устройства; Пат. США №4735303, МКИ4 В65G 25/00 - грейферная подача; Пат. ГДР №232847, МКИ4 В21D 43/05 - грейферное транспортирующее устройство многопозиционного пресса; Пат. США №4875931, МКИ4 В21J 13/08 - привод грейферной подачи с трехкоординатным перемещением].
Общим недостатком всех данных подач является сложность конструкции, связанная с наличием кулачков, кулачковой дорожки с роликом, различных шлицевых валов с пазами сложного сечения, втулок с кольцевыми канавками и т.п.
Вторым направлением в автоматизации горячей объемной штамповки является применение штатных промышленных роботов как для загрузки линейных штампов, так и для перемещения по позициям [заявка Франции №2497129, МКИ В21J 13/10, 5/02 - автоматическая линия горячей штамповки; заявка ФРГ №3737913, МКИ4 В21D 43/22, - выборочное обслуживание прессов последовательного действия для обработки крупных деталей роботом или подъемным механизмом с промежуточным штабелированием].
Недостатком таких устройств является повышенная стоимость, т.к. на один пресс требуется, даже при трехпозиционном штампе, минимум четыре робота.
Наиболее близким по техническим сущностям к предлагаемому изобретению является манипулятор грейферной подачи типа шагающей балки, например КГШП [заявка ФРГ №3116752, МКИ В21J 13/10].
Предлагаемую подачу устанавливают перед КГШП, ее крепят к полу болтами так, что она может отводиться в сторону, например, при смене инструмента. На КГШП установлены штампы, укрепленные на плите прихватами. Нагретая заготовка устанавливается загрузочным устройством в первый штамп. Дальнейшее его перемещение осуществляется манипулятором. На последней позиции заусенец обрезается с поковок на провал. Заусенец удаляется из разрезанного штампа специальным устройством. С задней стороны КГШП расположены передвижные устройства для очистки и охлаждения штампов. Подача имеет управляющий корпус, в котором расположена ось, вращаемая через приводной механизм от электродвигателя. Частота вращения оси предварительно выбирается. С начала транспортирования заготовок привод включается и вращается непрерывно, а также, в случае необходимости, с различной частотой. На оси расположены несколько пар кулачков, с помощью которых осуществляется управление движением шагающей балки. На держателе расположено несколько захватов, которые удерживаются держателями, внутри которых расположен механизм для движения рычага держателей, а также для вращения вокруг продольной оси. Таким образом, грейферная подача содержит неподвижное основание, грейферные захваты, механизм перемещения грейферных захватов вдоль позиций пресса, механизм вертикального перемещения, оснащенные приводами механизмы выдвижения грейферных захватов и их сжатия и разжатия.
Недостатком грейферной подачи является сложность конструкции кулачкового привода, наличие большого количества рычагов и гидроприводов, помимо электродвигателей.
Изобретение направлено на упрощение конструкции, уменьшение массы и габаритов подвижной части грейферной подачи.
Достижение технического результата обусловлено тем, что механизм перемещения грейферных захватов вдоль позиций пресса и механизм их вертикального перемещения выполнены в виде рамки, имеющей возможность качательного движения посредством шарнирно соединенных с рамкой тяг, в средней части одной из которых установлен шарнир, соединенный посредством тяги с кривошипом, выполненным с возможностью вращения от привода, причем грейферные захваты закреплены на упомянутой рамке, а приводы механизма выдвижения грейферных захватов и механизма их сжатия и разжатия выполнены с двигателями, имеющими дисковый ротор и статор, установленный на неподвижном основании в зоне работы соответствующего привода.
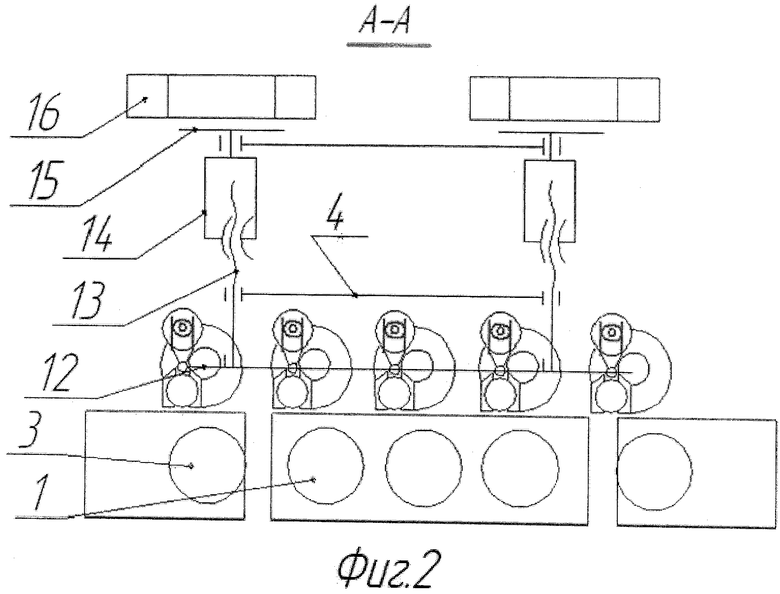
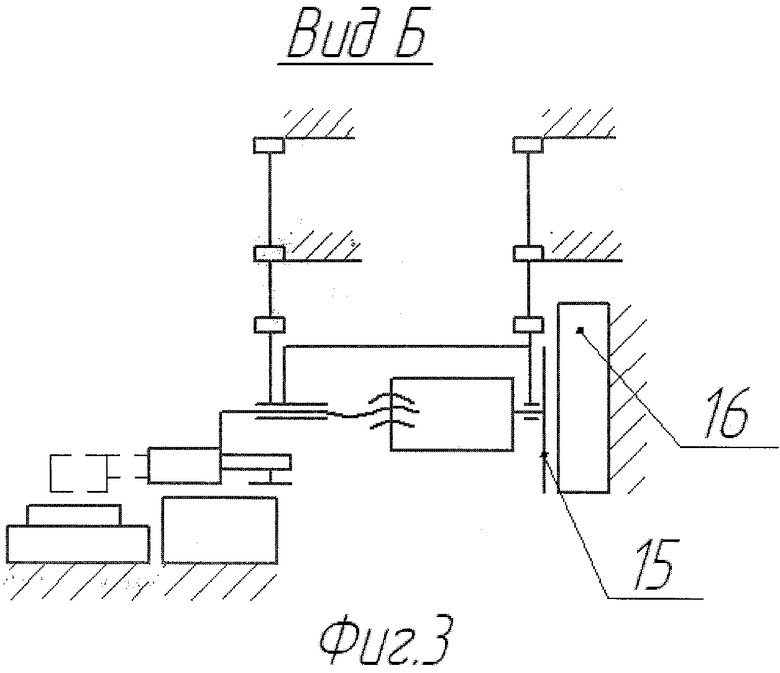
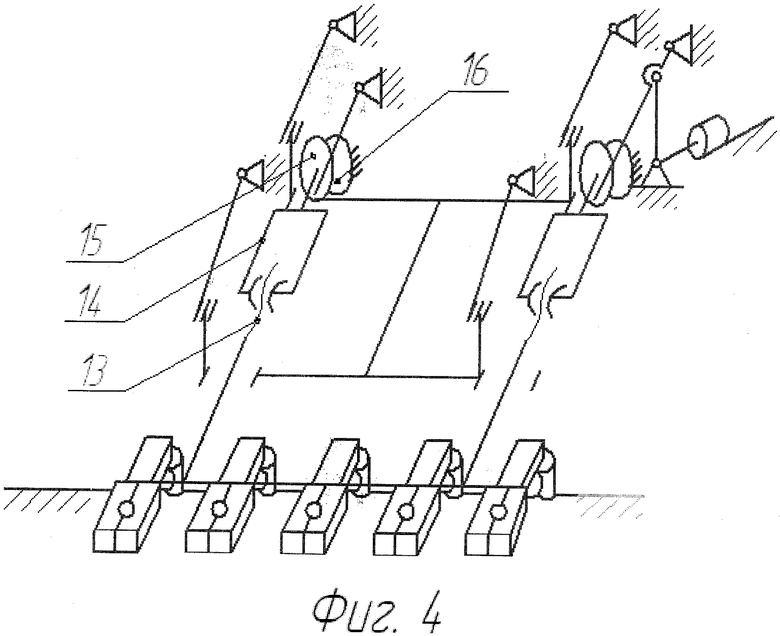
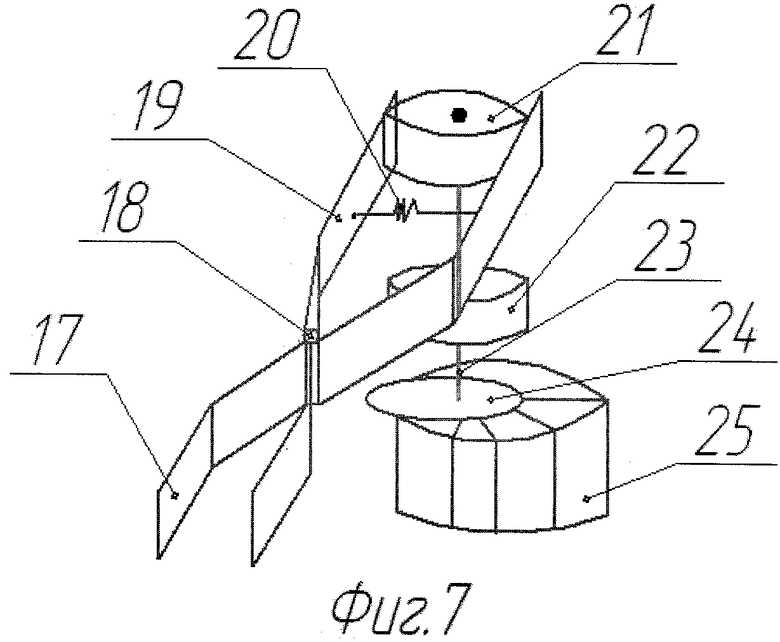
Сущность изобретения иллюстрируется чертежами, где на фиг.1 показана кинематическая схема грейферной подачи, вид спереди; на фиг.2 - то же, вид сверху; на фиг.3 - вид сбоку; на фиг.4 показана пространственная схема грейферной подачи; на фиг.5 - вид на торцевую внешнюю магнитную систему с прямоугольными катушками; на фиг.6 - вид сверху на внешние магнитные системы в случае их пересечения, с круглыми катушками; на фиг.7 схематично показан кулачковый привод захвата.
Грейферная подача предназначена для перемещения деталей по позициям пресса 1, начиная от загрузочной позиции 2. Детали захватываются с помощью захватов 3, укрепленных на качающейся рамке 4 с шарнирами 5, соединенными с основаниями тяг 6, в средней части одной из тяг установлен шарнир 7, который с помощью тяги 8 соединен с кривошипом 9, вращаемым приводом 10. На фиг.1 пунктирной линией обозначены зоны роторов приводов выдвижения, а штрихпунктирной линией обозначены зоны сопряженных с ними внешних магнитных систем. Позицией 11 обозначен исходный пункт транспортировки готовых изделий. Привод механизма выдвижения захватов состоит из линейки 12 захватов, ходовых винтов 13, гаек 14, вращаемых роторами 15, находящимися в зоне роторных магнитных систем 16. Выдвинутое положение захватов показано на фиг.3 пунктиром. Механизмы сжима - разжима грейферных захватов включают в себя губки 17, вращающиеся в шарнире 18, и снабженные толкателями 19, которые прижимаются пружинами 20 к кулачку 21, к которому подсоединен выходной вал редуктора 22, а его входной вал 23 снабжен дисковым ротором 24, который находится в зоне внешних магнитных систем 25. Магнитные системы грейферных захватов имеют ярмо статора 26, зубцы 27 и обмотки 28. Магнитные системы двигателей механизмов выдвижения снабжены ярмом статора 29, катушками 30, сердечниками 31.
Грейферная передача работает следующим образом. Механизм перемещения вдоль позиций совмещен с механизмом подъема и выполнен в виде качающейся рамки 4. Привод 10 вращает кривошип 9, который с помощью тяги 8 придает качательное движение тягам 6, а те в свою очередь придают качательное движение рамке 4, на которой укреплена линейка захватов 12. Рабочий цикл начинается с выдвижения захватов в зону рабочих позиций и включения статоров 25 внешних магнитных систем. Ротор 24 через вал 23 и выходной вал редуктора 22 воздействует на кулачок 21, который поворачивается своей наименее широкой частью относительно толкателей 19 и посредством усилия пружин 20 захваты осуществляют зажим соответствующих заготовок. Затем включаются механизмы выдвижения, которые осуществляют вдвижение захватов (показано на фиг.3 сплошными линиями). Это осуществляется роторами 15, которые находятся в зоне внешних магнитных систем 16. Роторы вращают гайки 14, а те взаимодействуют с ходовыми винтами 13. Затем происходит рабочий ход пресса и цикл перемещения по позициям повторяется. Таким образом, каждый цикл сопровождается захватом, перемещением по позициям, разжимом, выдвижением линейки захватов из зоны пресса, рабочим ходом пресса, опять перемещением по позициям и т.д. Система управления осуществляет синхронизацию привода 10 с работой приводов выдвижения (роторов 15 и внешних магнитных систем 16, и роторов 24 и внешних магнитных систем 25). Все приводы с целью координации их движения могут снабжаться датчиками положения, а их работа координируется программируемым контроллером.
Технико-экономическим преимуществом данной грейферной подачи является то, что магнитные системы приводов выдвижения и сжима - разжима установлены на неподвижном основании. Следовательно, их масса не участвует в создании динамических сил, воздействующих на линейку захватов, в результате чего быстродействие переноса заготовок с позиции на позицию может быть существенно повышено, что ведет к повышению производительности всего кузнечно-штамповочного комплекса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРЕЙФЕРНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ЗАГОТОВОК МЕЖДУ ПОЗИЦИЯМИ ПРЕССА | 2011 |
|
RU2515734C2 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
| Многопозиционный пресс для горячей объемной штамповки | 1985 |
|
SU1279716A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1995 |
|
RU2090291C1 |
| Многопозиционный пресс для штамповки изделий | 1991 |
|
SU1819177A3 |
| Грейферная подача для транспортировки листового материала вдоль линии прессов | 1983 |
|
SU1090475A1 |
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1998 |
|
RU2146618C1 |
| Грейферное устройство для подачи заготовок в пресс | 1975 |
|
SU541684A1 |


Изобретение относится к грейферным транспортирующим устройствам многопозиционных процессов, преимущественно кривошипных горячештамповочных. Подача содержит неподвижное основание, грейферные захваты, механизм перемещения грейферных захватов вдоль позиций пресса, механизм их вертикального перемещения и оснащенные приводами механизмы выдвижения грейферных захватов и их сжатия и разжатия. Механизм перемещения захватов вдоль позиций пресса и механизм их вертикального перемещения выполнены в виде рамки, на которой закреплены захваты. Рамка имеет возможность качательного движения посредством шарнирно соединенных с ней тяг. В средней части одной из тяг установлен шарнир, соединенный посредством тяги с кривошипом. Приводы механизма выдвижения грейферных захватов и механизма их сжатия и разжатия выполнены с двигателями. Двигатели имеют дисковый ротор и статор, установленный на неподвижном основании в зоне работы соответствующего привода. В результате обеспечивается уменьшение массы и габаритов подвижной части грейферной подачи. 7 ил.
Грейферная подача к прессу, содержащая неподвижное основание, грейферные захваты, механизм перемещения грейферных захватов вдоль позиций пресса, механизм их вертикального перемещения и оснащенные приводами механизмы выдвижения грейферных захватов и их сжатия и разжатия, отличающаяся тем, что механизм перемещения грейферных захватов вдоль позиций пресса и механизм их вертикального перемещения выполнены в виде рамки, имеющей возможность качательного движения посредством шарнирно соединенных с рамкой тяг, в средней части одной из которых установлен шарнир, соединенный посредством тяги с кривошипом, выполненным с возможностью вращения от привода, причем грейферные захваты закреплены на упомянутой рамке, а приводы механизма выдвижения грейферных захватов и механизма их сжатия и разжатия выполнены с двигателями, имеющими дисковый ротор и статор, установленный на неподвижном основании в зоне работы соответствующего привода.
| DE 3116752 A1, 04.11.1982 | |||
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1995 |
|
RU2090291C1 |
| УСТРОЙСТВО ДЛЯ ПРИВОДА ПОДАЮЩЕЙ ЛИНЕЙКИ ДЛЯ МНОГОПОЗИЦИОННОГО ПРЕССА | 1997 |
|
RU2119839C1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| US 3707908 A1, 02.01.1973 | |||

