Изобретение относится к грейферным транспортирующим устройствам многопозиционных процессов, преимущественно к КГШП (кривошипный горячештамповочный пресс).
Исторически первыми грейферными подачами были грейферные линейки, приводимые в движение одним электродвигателем с помощью сложных кинематических цепей [Пат. США №3771669, Н.кл. 214-IBB, В65д 25/04 - грейферный узел многофункционального подающего устройства; Пат. США №4735303, МКИ4 В65G 25/00 - грейферная подача; Пат. ГДР №232847, МКИ4 В21D 43/05 - грейферное транспортирующее устройство многопозиционного пресса; Пат. США №4875931, МКИ4 В21J 13/08 - привод грейферной подачи с трехкоординатным перемещением].
Общим недостатком всех данных подач является сложность конструкции, связанная с наличием кулачков, кулачковой дорожки с роликом, различных шлицевых валов с пазами сложного сечения, втулок с кольцевыми канавками и т.п.
Вторым направлением в автоматизации горячей объемной штамповки является применение штатных промышленных роботов как для загрузки линейных штампов, так и для перемещения по позициям [заявка Франции №2497129, МКИ В21J 13/10, 5/02 - автоматическая линия горячей штамповки; заявка ФРГ №3737913, МКИ4 В21D 43/22 - выборочное обслуживание прессов последовательного действия для обработки крупных деталей роботом или подъемным механизмом с промежуточным штабелированием].
Недостатком таких устройств является повышенная стоимость, т.к. на один пресс требуются, даже при трехпозиционном штампе, минимум четыре робота.
Наиболее близким по технической сущности к предлагаемому изобретению является грейферное устройство для транспортировки заготовок между позициями пресса, содержащее неподвижное основание, две грейферные линейки, механизм сжатия и разжатия грейферных линеек с приводом и механизмы их вертикального и поступательного перемещения между позициями пресса, оснащенные приводами (RU 2090291 C1, B21D 43/00, 20.09.1997, документ на 7 с.).
Его недостатком являются высокие массогабаритные показатели, обусловленные наличием сложных механических связей между грейферными линейками.
Изобретение направлено на улучшение, в частности на уменьшение массы и габаритов подвижных частей.
Это достигается тем, что грейферное устройство для транспортировки заготовок между позициями пресса, содержащее неподвижное основание, две грейферные линейки, механизм сжатия и разжатия грейферных линеек с приводом и механизмы их вертикального перемещения и поступательного перемещения между позициями пресса, оснащенные приводами, согласно изобретению привод механизма сжатия и разжатия грейферных линеек и привод механизма их вертикального перемещения выполнены с двигателями, имеющими дисковый ротор и статор, установленный на неподвижном основании в зоне работы соответствующего привода.
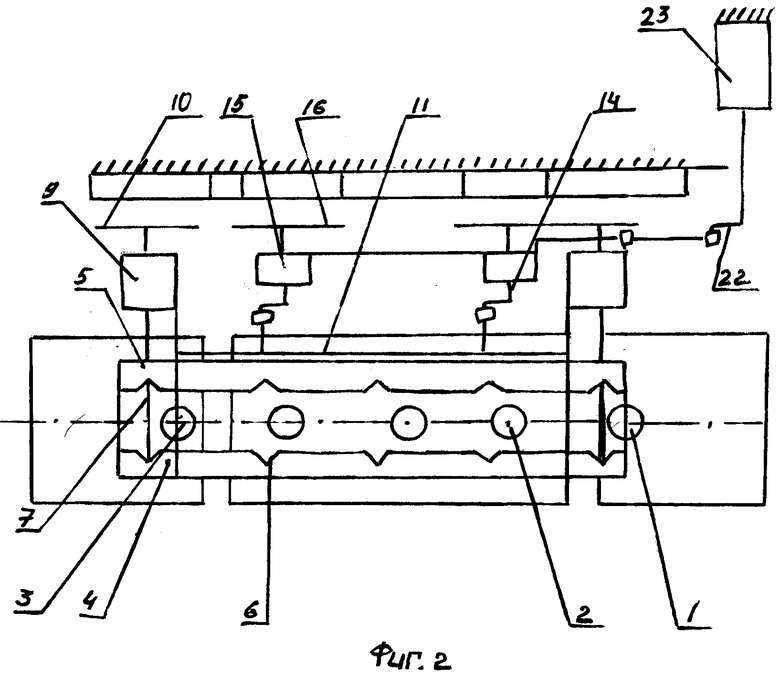
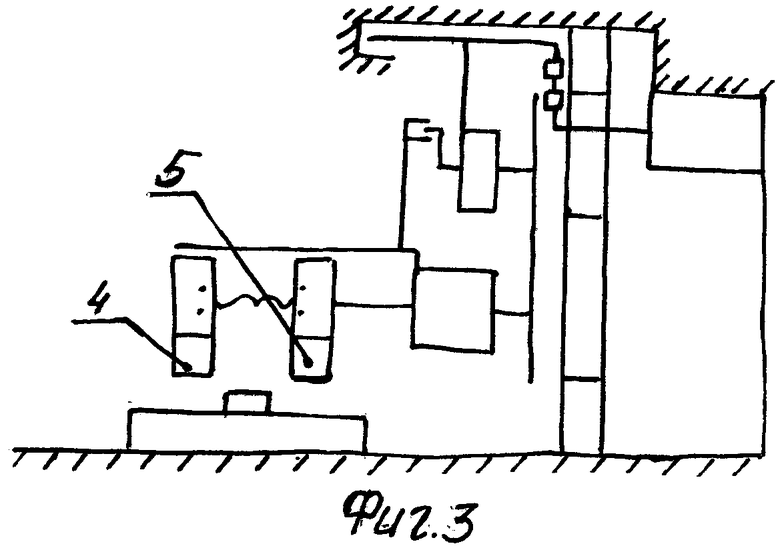
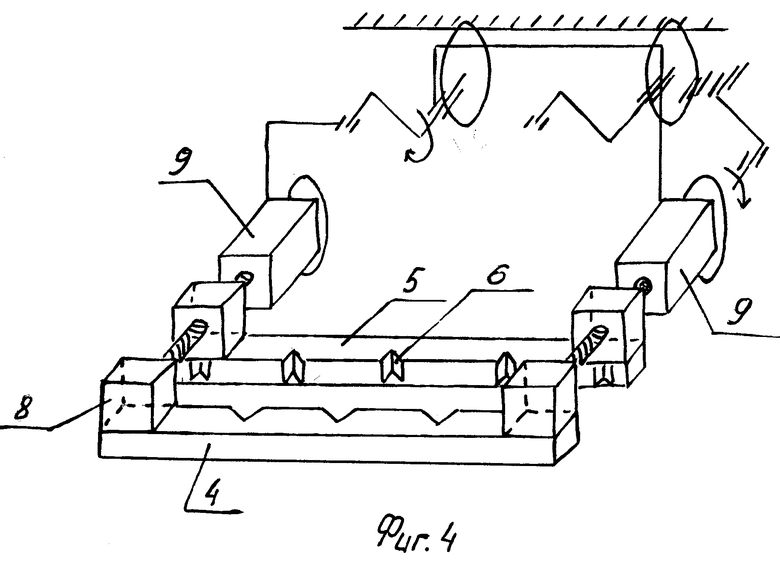
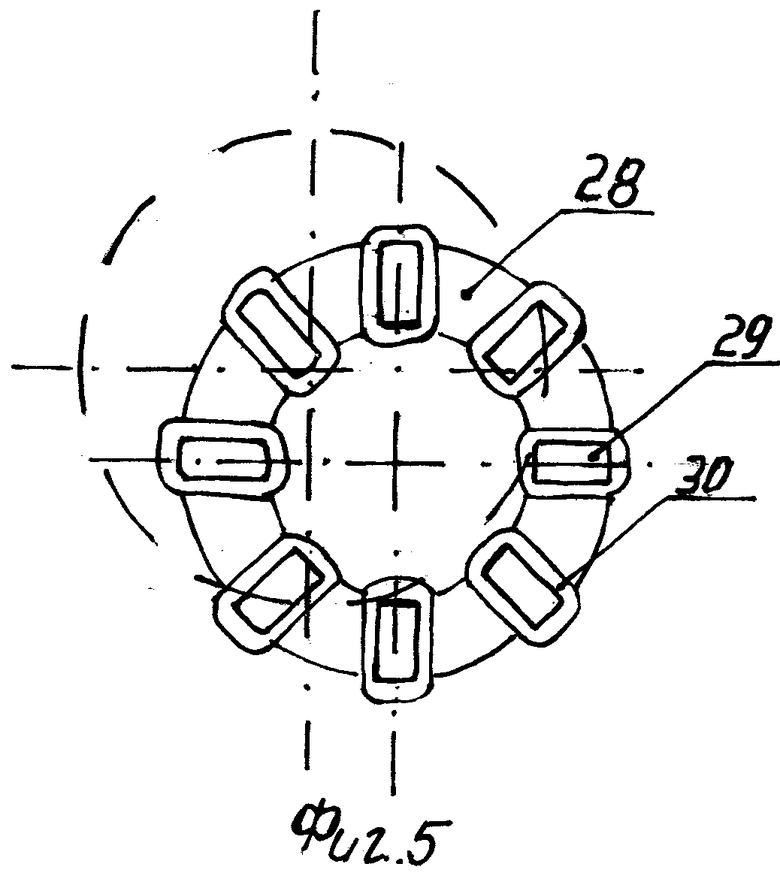
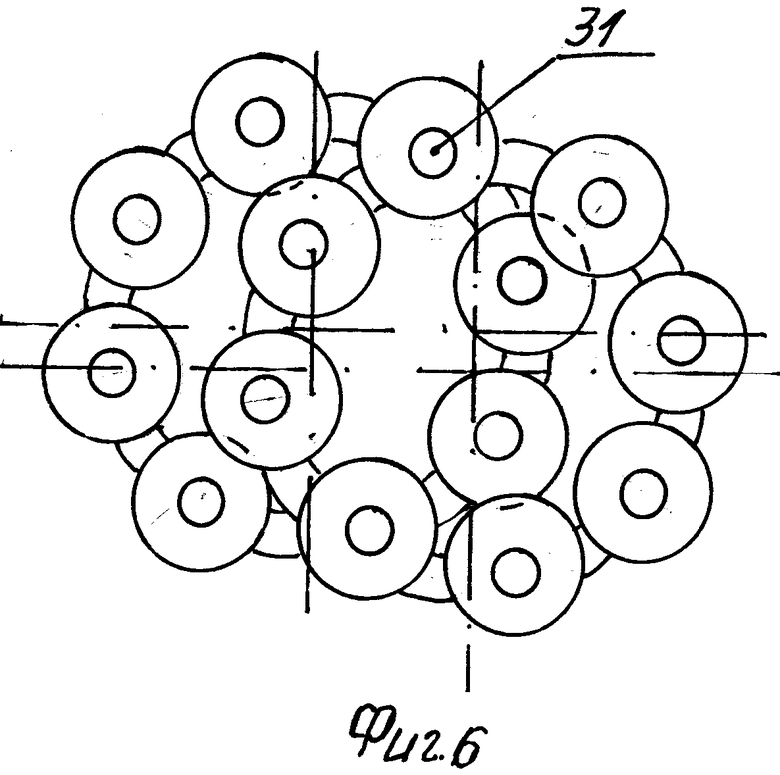
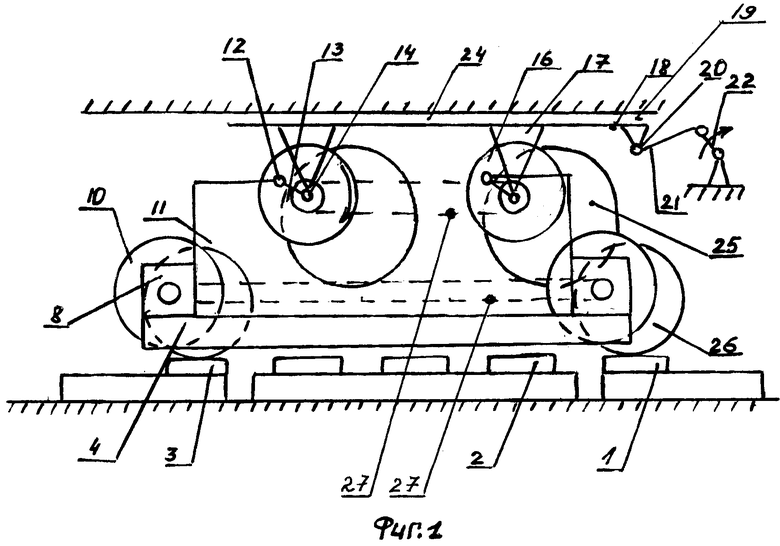
Сущность изобретения иллюстрируется чертежом, где на фиг.1 изображена кинематическая схема грейферного устройства, вид спереди; на фиг.2 - то же, вид сверху; на фиг.3 - то же, вид сбоку; на фиг.4 изображена пространственная кинематическая схема; на фиг.5 показана внешняя магнитная система; на фиг.6 показано возможно пересечение внешних магнитных систем, в частности зон статоров.
Грейферное устройство предназначено для последовательного перемещения заготовок по позициям к выходной позиции 1 через промежуточные позиции 2, начиная с исходной позиции 3. Манипулятор имеет шагающую балку, выполненную в виде двух линеек 4 и 5, каждая из которых симметрична одна относительно другой, которые снабжены захватами 6, служащими для перемещения заготовок. Сжим и разжим линеек осуществляются с помощью винтов 7, каждый из которых по своей длине имеет половину левой и половину правой резьбы. Винты вращаются в подшипниках 8, закрепленных на линейке. Вращение осуществляется двигателями 9 с дисковыми роторами 10. Таким образом двигатели сжима-разжима укреплены на раме 11, имеющей подшипники 12, которые с помощью кривошипа 13 связаны с валами 14 приводов подъема. Они же приводятся в движение мотор-редукторами привода подъема 15, которые также снабжены дисковыми якорями 16. Сами приводы установлены в опорах 17, а они закреплены на раме 18, перемещающейся в поступательном подшипнике 19, рама снабжена вращательным подшипником 20, соединенным через шатун 21 с кривошипом 22 и с приводом поступательного перемещения 23. Перемещение рамы 18 происходит в поступательном подшипнике 24. Приводы подъема-опускания и сжима-разжима имеют внешние магнитные системы торцевого типа (статоры). Зоны статора обозначены: 25 для приводов подъема-опускания и 26 - сжима-разжима. Для синхронизации приводов могут быть применены гибкие связи 27. Более подробно конструкция внешних магнитных систем показана на фиг.5 и 6. Каждая из них включает в себя общий магнитопровод 28, сердечники 29 и катушки 30. Возможная зона наличия якоря показана на фиг.5 пунктиром. На фиг.6 показано возможное пересечение внешних магнитных систем, в частности зон статоров 25 и 26 на фиг.1. В этом случае сердечники 31 с обмоткой одновременно участвуют в работе двух внешних магнитных систем.
Устройство работает следующим образом. При наличии заготовки на позиции 3 происходит, при условии правильной ориентации захватов 6, запуск приводов 9 дисковыми роторами 10, которые находятся напротив зоны статоров 26. Винты 7 вращаются и т.к. они имеют участки с разным направлением резьбы, линейки 4 и 5 сжимают заготовку с помощью захватов 6. Затем происходит включение мотор-редукторов приводов подъема 15. Кривошипы 13 поднимают раму 11 с грейферными линейками (шагающую балку) и после совершения пол-оборота производится перенос заготовки с позиции 3 на позицию 2 с помощью привода 23, который затем приостанавливается, происходят опускание кривошипа 13, разжим линеек, затем подъем до первоначального состояния, сжим линеек и далее операции повторяются. Двигатели мотор-редукторов приводов 9 и 15 имеют дисковые роторы 10 и 16 асинхронного типа, которые взаимодействуют с внешними торцевыми зонами статоров 25 и 26. Привод 23 установлен на основании, поэтому приводится в движение двигателем традиционного типа. Все приводы с целью координации их движения могут снабжаться датчиками положения, а их работа координируется программируемым контроллером.
Технико-экономическим преимуществом данного грейферного устройства является то, что магнитные системы приводов подъема-опускания и сжима-разжима установлены на неподвижном основании. Следовательно, их масса не участвует в создании динамических сил, воздействующих на привод 23, в результате быстродействие переноса заготовок с позиции на позицию может быть повышено, что ведет к повышению производительности всего кузнечно-штамповочного комплекса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРЕЙФЕРНАЯ ПОДАЧА ДЛЯ ПЕРЕМЕЩЕНИЯ ДЕТАЛЕЙ В ПРЕССЕ | 2012 |
|
RU2521909C2 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Автоматическая линия для изготовления объемных изделий | 1988 |
|
SU1590340A1 |
| Устройство для штамповки деталей | 1979 |
|
SU981015A1 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
| Грейферное подающее устройство к прессу | 1987 |
|
SU1433594A1 |
| Автоматизированный комплекс для горячей штамповки | 1988 |
|
SU1750839A1 |
| Грейферное устройство для подачи заготовок к прессу | 1983 |
|
SU1230729A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
Изобретение относится к грейферным транспортирующим устройствам, которые используются при обработке заготовок на многопозиционных прессах. Грейферное устройство содержит неподвижное основание и две грейферные линейки, оснащенные механизмами их сжатия и разжатия, вертикального перемещения и поступательного перемещения между позициями пресса. Привод механизма сжатия и разжатия грейферных линеек и привод механизма их вертикального перемещения выполнены с двигателями, имеющими дисковый ротор и статор. Статор установлен на неподвижном основании в зоне работы соответствующего привода. В результате обеспечивается быстродействие переноса заготовок. 6 ил.
Грейферное устройство для транспортировки заготовок между позициями пресса, содержащее неподвижное основание, две грейферные линейки, механизм сжатия и разжатия грейферных линеек с приводом и механизмы их вертикального перемещения и поступательного перемещения между позициями пресса, оснащенные приводами, отличающееся тем, что привод механизма сжатия и разжатия грейферных линеек и привод механизма их вертикального перемещения выполнены с двигателями, имеющими дисковый ротор и статор, установленный на неподвижном основании в зоне работы соответствующего привода.
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1995 |
|
RU2090291C1 |
| УСТРОЙСТВО ДЛЯ ПРИВОДА ПОДАЮЩЕЙ ЛИНЕЙКИ ДЛЯ МНОГОПОЗИЦИОННОГО ПРЕССА | 1997 |
|
RU2119839C1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| DE 3116752 A1, 04.11.1982 | |||
| US 3707908 A1, 02.01.1973 | |||

