Изобретение относится к области точного приборостроения, преимущественно гироскопического, и может быть использовано при создании инерциальных систем ориентации и навигации.
Известны способы компенсации погрешностей инерциальных измерительных блоков путем моделирования ошибок конкретного типа чувствительных элементов и их последующей алгоритмической компенсацией (см, например, книгу М.А. Басараб, В.Ф. Кравченко, В.А. Матвеева "Математическое моделирование физических процессов в гироскопии", М., 2005, стр. 69-74), обусловленных для волнового твердотельного гироскопа конструктивными факторами, работой системы возбуждения резонатора, вибрациями основания.
Алгоритмическую компенсацию температурной скорости дрейфа выполняют, используя способ (см. патент RU 348073 C1 по кл. G01C 19/5691 от 27 апреля 2013 г.), при котором в рабочем режиме гироскопа измеряют текущее значение частоты резонатора и производят с помощью вычислителя алгоритмическую компенсацию температурной скорости дрейфа волнового твердотельного гироскопа, используя математическую модель температурной скорости дрейфа, параметры которой определены по результатам измерений в предварительном калибровочном запуске.
За прототип взят способ компенсации температурных погрешностей чувствительных элементов в инерциальном измерительном блоке (см. сайт URL:http://www.istina.msu.ru. А.В. Козлов, И.Е. Тарыгин, А.А. Голован. Калибровка инерциальных измерительных блоков на грубых стендах с оценкой температурных зависимостей по эксперименту с переменной температурой).
В этом способе отмечен традиционный подход к определению тепловых моделей погрешностей чувствительных элементов инерциального измерительного блока, используемых при компенсации. Для реализации температурной компенсации в чувствительных элементах инерциального измерительного блока устанавливают термодатчики. Место расположения термодатчиков выбирают из конструктивных особенностей чувствительных элементов. Термодатчик в чувствительном элементе может быть установлен на его внешней поверхности корпуса или во внутренней полости приборов на их конструктивных элементах. В начале проводят калибровочную операцию с целью получения температурных зависимостей погрешностей чувствительных элементов в диапазоне рабочих температур внешней среды с применением термокамеры. Расположенный в термокамере инерциальный измерительный блок приводят в рабочее состояние при начальной температуре термокамеры, выдерживают инерциальный измерительный блок при установившейся температуре внешней среды до момента установления температуры чувствительных элементов и измеряют погрешности чувствительных элементов. Выполняют измерение погрешностей чувствительных элементов в установившемся режиме при других температурах окружающей среды. Получают температурные зависимости систематических погрешностей чувствительных элементов путем аппроксимации полученных измерений в диапазоне температур окружающей среды от минус 60°С до плюс 60°С, после чего используют эти зависимости для их компенсации.
В известном способе получают зависимости погрешностей чувствительных элементов от установившейся температуры их термодатчиков. При этом объемные тепловые поля чувствительных элементов являются стационарными и неравномерными из-за наличия внутренних источников тепловыделений, а также вследствие неоднородных граничных условий теплопередачи. При изменении температуры окружающей среды происходит динамическое изменение тепловых полей чувствительных элементов. В переходном температурном режиме температурные поля чувствительных элементов отличаются от их установившихся значений вследствие разных постоянных времени стабилизации температур их конструктивных узлов. При этом в переходном и установившемся режимах температурные градиенты в чувствительных элементах и их среднеобъемные температуры отличаются. Эта разность тепловых полей обуславливает разное физическое состояние конструкций чувствительных элементов, то есть отличаются их температурные деформации, напряжения, физические параметры конструкционных материалов и газовой среды, что вызывает не одинаковые температурные погрешности в переходном и установившемся режимах. Таким образом в известном способе возникают динамические ошибки в компенсации температурных погрешностей чувствительных элементов в переходном температурном режиме при имеющихся в реальных условиях эксплуатации изменениях температуры окружающей среды и использования для компенсации статической температурной зависимости погрешностей чувствительных элементов. Кроме влияния на тепловые поля чувствительных элементов температуры окружающей среды также оказывают воздействие внутренние источники тепловыделений от двигателей, датчиков углов и моментов, а также от электроники инерциального измерительного блока. Так при включении инерциального измерительного блока при постоянной температуре окружающей среды и начальной температуре блока, равной температуре среды, за счет внутренних тепловыделений происходит перегрев чувствительных элементов относительно температуры окружающей среды. Время установления температур чувствительных элементов при запуске обуславливает важный технический параметр, которым является время готовности инерциального измерительного блока. Температурные погрешности чувствительных элементов в переходном режиме при воздействии внутренних тепловыделений будут отличаться от определяемых в известном способе статических температурных зависимостей погрешностей при разных установившихся температурах окружающей среды и их применение в этом случает обусловит погрешность компенсации.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является повышение точности компенсации температурных погрешностей инерциального измерительного блока систем ориентации и навигации.
Технический результат достигается тем, что в известном способе компенсации температурных погрешностей инерциального измерительного блок систем ориентации и навигации, включающем предварительную установку термодатчиков для измерения температур окружающей среды и инерциальных чувствительных элементов блока, измерение погрешностей инерциальных чувствительных элементов в дискретных температурных точках в рабочем диапазоне температур окружающей среды с использованием термокамеры, после чего на основе этих измерений определяют модели температурных погрешностей чувствительных элементов в виде математических функциональных зависимостей погрешностей от температур, а в рабочем режиме измеряют температуры чувствительных элементов и компенсируют алгоритмически их температурные погрешности с использованием полученных математических моделей температурных погрешностей и вычислителя, дополнительно в предварительной калибровочной операции включают блок при его начальной нормальной температуре в условиях постоянной нормальной температуры окружающей среды, измеряют потребляемую блоком мощность электропитания и с момента начала функционирования чувствительных элементов находят их переходные характеристики на временном периоде выхода температур чувствительных элементов на установившиеся значения, на основе которых определяют порядок и коэффициенты передаточных функций чувствительных элементов по мощности электропитания, затем при установившихся температурах чувствительных элементов работающего блока скачкообразно изменяют температуру окружающей среды с нормального значения до величины предельной плюсовой температуры и определяют переходные характеристики чувствительных элементов на периоде выхода их температур на новые установившиеся значения, на основе которых определяют порядок, коэффициенты передаточных функций чувствительных элементов по температуре окружающей среды, после чего блок выключают и последовательно выводят его чувствительные элементы на установившиеся температуры в дискретных точках рабочего диапазона температур окружающей среды, включают блок и при этих температурах в момент начала функционирования чувствительных элементов измеряют их систематические погрешности и температуры, находят на основе этих результатов функциональные зависимости погрешностей чувствительных элементов от их температур на момент начала функционирования, после этого определяют дифференциальные уравнения динамических моделей температурных погрешностей чувствительных элементов от воздействия мощности электропитания блока и температуры окружающей среды на основе полученных передаточных функций, а затем в рабочем режиме при включении блока определяют температуру чувствительных элементов в момент начала их функционирования, величину потребляемой блоком электрической мощности, температуру окружающей блок среды и производят алгоритмическую компенсацию температурных погрешностей чувствительных элементов инерциального измерительного блока, используя для этого решения в реальном масштабе времени, полученных с помощью вычислителя, следующих динамических математических моделей
ωi(t)=ωpi(t)+ωci(t)+ωi(0),
где
 нумерация чувствительных элементов в инерциальном измерительном блоке,
нумерация чувствительных элементов в инерциальном измерительном блоке,
ωi(t)- рабочая модель общей температурной погрешности i-гo чувствительного элемента блока;
ωpi (t) - рабочая модель температурной погрешности i-гo чувствительного элемента от воздействия мощности электропитания блока, которая определяется в результате решения с помощью вычислителя дифференциального уравнения

где
P1(t)- рабочая мощность электропитания блока;
 - исходное калибровочное значение погрешности i-гo чувствительного элемента на момент скачкообразного воздействия мощности электропитания;
- исходное калибровочное значение погрешности i-гo чувствительного элемента на момент скачкообразного воздействия мощности электропитания;
 - установившееся калибровочное значение погрешности после скачкообразного воздействия мощности электропитания;
- установившееся калибровочное значение погрешности после скачкообразного воздействия мощности электропитания;
n - порядок дифференциального уравнения, определяемый при калибровке.
 - коэффициенты динамической модели погрешности, определяемые при калибровке;
- коэффициенты динамической модели погрешности, определяемые при калибровке;
ωci(t) рабочая модель температурной погрешности i-гo чувствительного элемента от воздействия окружающей среды, которая находится в результате решения с помощью вычислителя следующего дифференциального уравнения

где
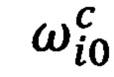
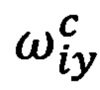
Θc(t) - рабочая температура окружающей блок среды;
 исходное калибровочное значение погрешности i-гo чувствительного элемента на момент скачкообразного воздействия, связанного с изменением температуры окружающей блок среды;
исходное калибровочное значение погрешности i-гo чувствительного элемента на момент скачкообразного воздействия, связанного с изменением температуры окружающей блок среды;
 установившееся калибровочное значение погрешности после скачкообразного воздействия температуры окружающей среды;
установившееся калибровочное значение погрешности после скачкообразного воздействия температуры окружающей среды;
m - порядок дифференциального уравнения определяемый при калибровке;
 - коэффициенты динамической модели погрешности, определяемые при калибровке;
- коэффициенты динамической модели погрешности, определяемые при калибровке;
ωi(0)=ωi(Θi0) - рабочее начальное значение погрешности i-гo чувствительного элемента в момент начала его функционирования;
ωi(Θi0) - функциональная зависимость погрешности i-гo чувствительного элемента от его температуры в момент начала функционирования, определяемая при калибровке;
Θi0 - рабочая температура i-го чувствительного элемента в момент начала его функционирования.
Математическую тепловую модель инерциального измерительного блока, рассматриваемого как единое однородной тело, можно представить в виде

где
Θ1 - среднеобъемная температура инерциального измерительного блока,
С1 - теплоемкость блока,
А1 с - тепловая проводимость между блоком и окружающей средой,
Р1 - мощность тепловыделений в блоке, обусловленная функционированием его чувствительных элементов и электроники,
Применив к уравнению (1) преобразование Лапласа, получим

где
S - комплексная переменная,
Θ1(0) - начальное значение температуры блока в момент начала его функционирования.

Таким образом при запуске инерциального измерительного блока его среднеобъемная температура обусловлена начальной температурой и влиянием мощности собственных тепловыделений и температуры окружающей среды.
Передаточную функцию i-гo чувствительного элемента по температуре инерциального измерительного блока можно представить
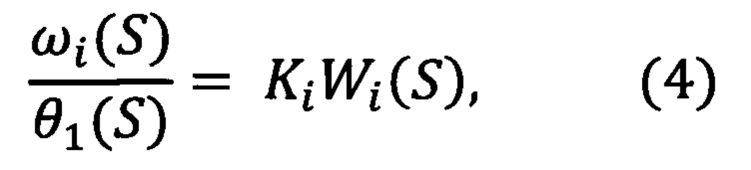
где
обозначения инерциальных чувствительных элементов в блоке (три гироскопа и три акселерометра),
ωi(S)- изображение по Лапласу температурной погрешности i-гo чувствительного элемента по температуре блока.
Из (4) с учетом (3) изображение по Лапласу температурной погрешности для i-гo чувствительного элемента можно представить

где
KpiWpi(S) - передаточная функция i-гo чувствительного элемента по мощности тепловыделений в блоке, обусловленной функционированием его элементов,
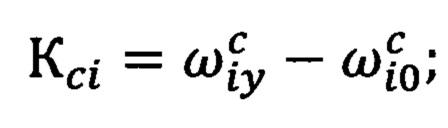
KciWci(S) - передаточная функция i-гo чувствительного элемента по температуре окружающей среды,
ωi(0) - начальное значение погрешности i-гo чувствительного элемента в момент начала его функционирования.
Согласно (5) изображение по Лапласу температурной погрешности для i-го чувствительного элемента блока представляет собой алгебраическую сумму изображений погрешностей обусловленных мощностью тепловыделений в блоке от электропитания его элементов, температуры окружающей среды и начального значения температурной погрешности.
Передаточные функции i-го чувствительного элемента по мощности электропитания блока и по температуре окружающей среды можно определить по переходным характеристикам, например, методом "площадей" (см. М.П. Симою. Определение коэффициентов передаточных функций линеаризованных звеньев и систем авторегулирования//Автоматика и телемеханика. - 1957. - №6), полученных экспериментальным путем. В общем виде передаточные функции KpiWpi(S) и KciWci(S) можно представить
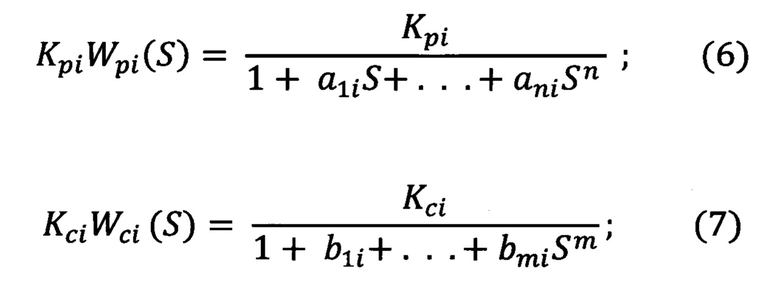
где
 и
и  коэффициенты, определяющие передаточные функции, которые определяются методом "площадей" по экспериментальным переходным характеристикам по следующим формулам
коэффициенты, определяющие передаточные функции, которые определяются методом "площадей" по экспериментальным переходным характеристикам по следующим формулам
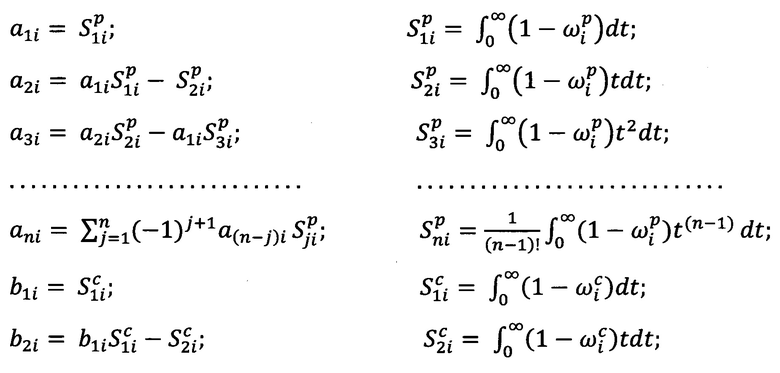
где
 - кривые переходных процессов в относительных величинах
- кривые переходных процессов в относительных величинах 
 - экспериментальные кривые переходных процессов;
- экспериментальные кривые переходных процессов;

 - исходные значения погрешностей на момент начала функционирования при скачкообразных воздействиях соответственно мощности электропитания и температуры окружающей среды;
- исходные значения погрешностей на момент начала функционирования при скачкообразных воздействиях соответственно мощности электропитания и температуры окружающей среды;
 - установившиеся значения погрешностей после скачкообразных воздействий мощности электропитания и температуры окружающей среды; n, m - порядки передаточных функций, которые определяют при идентификации моделей температурных погрешностей по переходным характеристикам i-гo чувствительного элемента при соответственно скачкообразных изменениях мощности электропитания блока и температуры окружающей среды.
- установившиеся значения погрешностей после скачкообразных воздействий мощности электропитания и температуры окружающей среды; n, m - порядки передаточных функций, которые определяют при идентификации моделей температурных погрешностей по переходным характеристикам i-гo чувствительного элемента при соответственно скачкообразных изменениях мощности электропитания блока и температуры окружающей среды.
На практике для идентификации типичных переходных характеристик чувствительных элементов, вызванных воздействием мощности тепловыделений от электропитания и температуры окружающей среды часто достаточно иметь передаточные функции не более третьего порядка.
Согласно уравнению (5) общую температурную погрешность в области оригиналов можно представит следующим образом

где
ωpi(t) - температурная погрешность от воздействия мощности электропитания блока, которая определяется в результате решения в реальном масштабе времени с помощью вычислителя дифференциального уравнения

ωci(t) - температурная погрешность от воздействия температуры окружающей среды, которая находится в результате решения в реальном масштабе времени дифференциального уравнения

Полученные выражения (8), (9), (10) используются при компенсации температурных погрешностей чувствительных элементов инерциального измерительного блока.
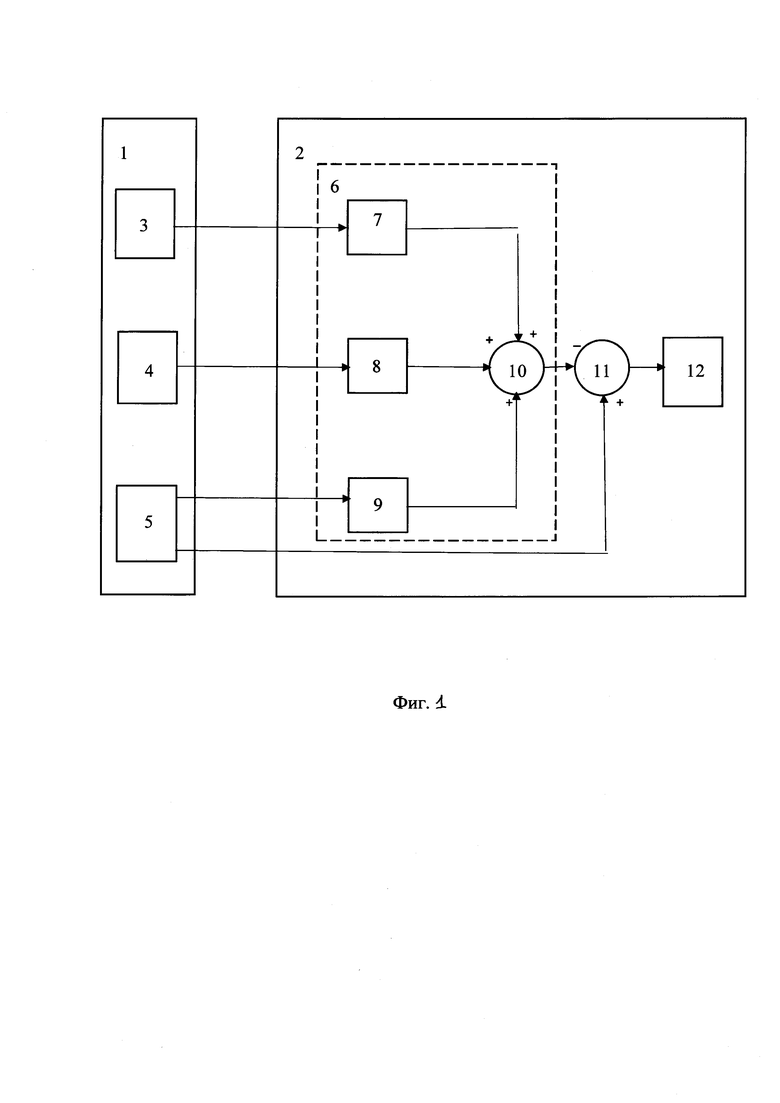
Блок-схема компенсации температурной погрешности i-гo чувствительного элемента в инерциальном измерительном блоке системы ориентации и навигации, соответствующая уравнениям (8), (9), (10), представлена на фиг. 1.
В составе инерциального измерительного блока 1 на фиг. 1 показаны i-й чувствительный элемент 5, блок электропитания 3, датчик температуры окружающей среды 4. Информация с инерциального измерительного блока 1 поступает в вычислитель 2, который имеет блок выработки температурной компенсации 6 и блок выработки параметров ориентации 12.
При калибровке задают нормальное значение температуры окружающей среды, которую измеряют с помощью датчика температуры 4. Инерциальный измерительный блок 1 выдерживают при этой температуре до момента достижения температуры i-гo чувствительного элемента 5, которую измеряют встроенным в него термодатчиком, температуры окружающей среды. Включают блок электропитания 3 и измеряют потребляемую им мощность P1. По переходной характеристике i-гo чувствительного элемента, вызванную воздействием мощности электропитания Р1 определяют порядок n и значение коэффициентов 
 передаточной функции i-гo чувствительного элемента по мощности электропитания.
передаточной функции i-гo чувствительного элемента по мощности электропитания.
При установившейся температуре работающего блока скачкообразно изменяют температуру окружающей среды θс с нормального значения до величины предельной плюсовой температуры, которую измеряют термодатчиком 4. Определяют переходную характеристику i-чувствительного элемента и на ее основе находят порядок m и коэффициенты  этого элемента по температуре окружающей среды.
этого элемента по температуре окружающей среды.
Во всем диапазоне температур окружающей среды через равные промежутки выбирают рабочие точки, на которых выводят последовательно выключенный блок 1 на установившийся режим, после чего блок включают и в момент начала функционирования i-го чувствительного элемента измеряют его систематическую погрешность и температуру. Используя аппроксимацию находят математическую зависимость полученных систематических погрешностей i-гo чувствительного элемента от его температуры на момент начала функционирования ωi(Θ0i). На основе полученных передаточных функций определяют динамические модели температурных погрешностей i-гo чувствительного элемента от воздействия мощности электропитания и температуры окружающей среды в виде дифференциальных уравнение (9) и (10).
В рабочем режиме при включении инерциального измерительного блока 1 сигнал с блока питания 3, характеризующий потребляемую мощность Р1 поступает в вычислитель 2, где в блоке 6 с помощью программы 7, решающей дифференциальное уравнение (9), вычисляется температурная погрешность i-гo чувствительного элемента, вызванная тепловыделениями от потребляемой электроэнергии. Сигнал с датчика температуры 4 окружающей среды поступает в блок 6, где с помощью программы 8, решающей дифференциальное (10), вычисляется температурная погрешность i-гo чувствительного элемента, вызванная температурой окружающей среды. В блоке 6 программой 9 формируется начальная погрешность i-гo чувствительного при запуске с использованием функциональной зависимости ωi(Θ0i). Погрешности от мощности электропотребления, температуры окружающей среды суммируются с начальной погрешностью в блоке 10 формирования общей температурной погрешности в соответствии с уравнение (8), которая затем поступает в блок 11, где вычитается из показаний, поступающих с i-гo чувствительного элемента 5, после чего эти уточненные показания направляются в блок выработки параметров ориентации.
Таким образом, предлагаемый способ компенсации температурных погрешностей инерциального измерительного блока систем ориентации и навигации имеет следующие отличия от известного способа:
- в предварительной калибровочной операции по определению параметров математических моделей температурных погрешностей чувствительных элементов блока вводятся новые действия, связанные с определением: потребляемой блоком мощности электропитания и температуры окружающей среды; переходных характеристик чувствительных элементов блока при скачкообразных изменениях потребляемой мощности и температуры окружающей среды; передаточных функций чувствительных элементов по мощности электропитания и по температуре окружающей среды; систематических погрешностей и температур чувствительных элементов в момент начала их функционирования; математических зависимостей погрешностей чувствительных элементов на момент начала их функционирования; моделей температурных погрешностей чувствительных элементов блока в виде дифференциальных уравнений, вызванных воздействием мощности электропитания и температуры окружающей среды;
- в рабочем режиме вводятся новые действия, связанные с: измерением начальной температуры чувствительных элементов в момент начала их функционирования, мощности электропотребления блока, температуры окружающей среды; решением в реальном масштабе времени дифференциальных уравнений моделей погрешностей чувствительных элементов и использованием полученных решений для компенсации температурных погрешностей блока;
- получено новое качество компенсации температурных погрешностей инерциального измерительного блока, связанное с применением динамических моделей температурных погрешностей чувствительных элементов блока, позволяющих повысить точность компенсации температурных погрешностей в переходных режимах.
- алгоритмическая компенсация температурных погрешностей инерциального измерительного блока происходит с использованием новых математических зависимостей, включающих температурные погрешности чувствительных элементов, вызванных мощность электропитания блока и температурой окружающей его среды.
На фиг. 1 представлена блок-схема компенсации температурной погрешности i-гo чувствительного элемента инерциального измерительного блока системы ориентации.
Предлагаемый способ может быть применен как для нетермостатируемых, так и для термостатируемых систем ориентации и навигации.
Проводились экспериментальные исследования на термостатируемом гироскопе ГВК-6, применяемом в ряде платформенных инерциальных навигационных систем. При запуске этого гироскопа происходит динамическое изменение его скорости дрейфа, обусловленное тепловым процессом выхода его элементов на установившиеся температуры режима термостатирования, что определяет время его точностной готовности. Ставилась задача по уменьшению времени точностной готовности гироскопа путем использования принципов предлагаемого способа температурной компенсации погрешностей. Для этого определялась переходная характеристика гироскопа при запуске в условиях нормальной температуры окружающей среды. Запуск производился одновременным включением электросистем гироскопа и системы термостатирования. По переходной характеристике находилась передаточная функция гироскопа по температуре его корпуса 
где
ωд(S) - изображение по Лапласу тепловой скорости дрейфа;
ΔΘТ(S) - изображение по Лапласу изменения температуры корпуса гироскопа,
ΔΘт(S)=Θу(S)-Θт(S),
Θу(S) - изображение по Лапласу установившейся температуры корпуса гироскопа, на котором расположен термодатчик системы термостатирования,
Θт(S) - изображение по Лапласу текущей температуры корпуса гироскопа,
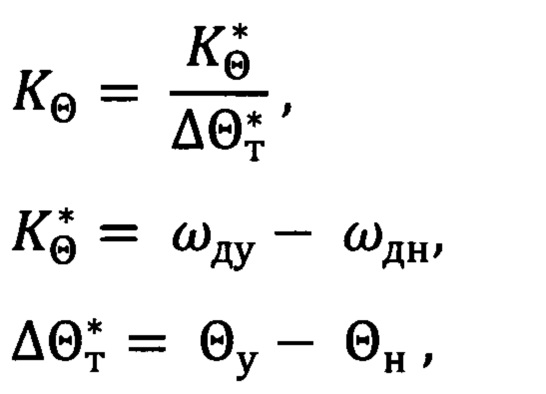
ωду - установившееся значение скорости дрейфа в запуске,
ωдн - начальное значение скорости дрейфа при запуске в нормальных условиях,
Θу - установившаяся температура корпуса гироскопа,
Θн - начальная температура корпуса гироскопа при запуске в нормальных условиях.
Коэффициенты а1, а2, а3 передаточной функции определялись методом "площадей" по соотношениям к (6).
В соответствии с передаточной функцией KΘW(S) можно представить
(1+a1S+a2S2+a3S3)ωд(S)=KΘΔΘТ(S).
После применения к этому соотношению обратного преобразования Лапласа получаем дифференциальное уравнение, являющееся динамической моделью тепловой скорости дрейфа термостатируемого гироскопа в запуске

С помощью вычислителя выполнялось решение в реальном масштабе времени этого дифференциального уравнения при начальных условиях 
Полученные в реальном масштабе времени решения использовались для компенсации температурной погрешности гироскопа при запуске.
Экспериментальная оценка результатов компенсации проводилась при запусках гироскопа в условиях различных температур окружающей среды.
Результаты испытаний показали, что при применении предлагаемого способа компенсации повышается существенно точность гироскопа, особенно при малых временах готовности. Так при 2-х минутной готовности скорость дрейфа уменьшилась при температурах окружающей среды 60°С, 25°С, -30°С соответственно в 7, 15, 3,5 раз.
Таким образом, использование предлагаемого способа компенсации температурных погрешностей инерциального измерительного блока позволяет повысить его технические характеристики, в частности, уменьшить время готовности, увеличить точность выработки параметров ориентации и навигации, что обеспечивает расширение области его применения в инерциальных системах ориентации и навигации различного назначения.
Изобретение относится к области точного приборостроения, преимущественно гироскопического, и может быть использовано при создании инерциальных систем ориентации и навигации. В предварительной калибровочной операции включают инерциальный измерительный блок при его начальной нормальной температуре в условиях постоянной нормальной температуры окружающей среды, измеряют потребляемую блоком мощность электропитания и с момента начала функционирования чувствительных элементов находят их переходные характеристики на временном периоде выхода температур чувствительных элементов на установившиеся значения, на основе которых определяют порядок и коэффициенты передаточных функций чувствительных элементов по мощности электропитания. Затем при установившихся температурах чувствительных элементов работающего блока скачкообразно изменяют температуру окружающей среды с нормального значения до величины предельной плюсовой температуры и определяют переходные характеристики чувствительных элементов на периоде выхода их температур на новые установившиеся значения, на основе которых определяют порядок, коэффициенты передаточных функций чувствительных элементов по температуре окружающей среды. После чего блок выключают и последовательно выводят его чувствительные элементы на установившиеся температуры в дискретных точках рабочего диапазона температур окружающей среды, включают блок и при этих температурах в момент начала функционирования чувствительных элементов измеряют их систематические погрешности и температуры, находят на основе этих результатов функциональные зависимости погрешностей чувствительных элементов от их температур на момент начала функционирования. После этого определяют дифференциальные уравнения динамических моделей температурных погрешностей чувствительных элементов от воздействия мощности электропитания блока и температуры окружающей среды на основе полученных передаточных функций, а в рабочем режиме при включении блока определяют температуру чувствительных элементов в момент начала их функционирования, величину потребляемой блоком электрической мощности, температуру окружающей блок среды и производят алгоритмическую компенсацию температурных погрешностей чувствительных элементов инерциального измерительного блока. Технический результат – повышение точности компенсации температурных погрешностей инерциального измерительного блока систем ориентации и навигации. 1 ил.
Способ компенсации температурных погрешностей инерциального измерительного блока систем ориентации и навигации, включающий предварительную установку термодатчиков для измерения температур окружающей среды и инерциальных чувствительных элементов блока, измерение погрешностей инерциальных чувствительных элементов в дискретных температурных точках в рабочем диапазоне температур окружающей среды с использованием термокамеры, после чего на основе этих измерений определяют модели температурных погрешностей чувствительных элементов в виде математических функциональных зависимостей погрешностей от температур, а в рабочем режиме измеряют температуры чувствительных элементов и компенсируют алгоритмически их температурные погрешности с использованием полученных математических моделей температурных погрешностей и вычислителя, отличающийся тем, что в предварительной калибровочной операции включают блок при его начальной нормальной температуре в условиях постоянной нормальной температуры окружающей среды, измеряют потребляемую блоком мощность электропитания и с момента начала функционирования чувствительных элементов находят их переходные характеристики на временном периоде выхода температур чувствительных элементов на установившиеся значения, на основе которых определяют порядок и коэффициенты передаточных функций чувствительных элементов по мощности электропитания, затем при установившихся температурах чувствительных элементов работающего блока скачкообразно изменяют температуру окружающей среды с нормального значения до величины предельной плюсовой температуры и определяют переходные характеристики чувствительных элементов на периоде выхода их температур на новые установившиеся значения, на основе которых определяют порядок, коэффициенты передаточных функций чувствительных элементов по температуре окружающей среды, после чего блок выключают и последовательно выводят его чувствительные элементы на установившиеся температуры в дискретных точках рабочего диапазона температур окружающей среды, включают блок и при этих температурах в момент начала функционирования чувствительных элементов измеряют их систематические погрешности и температуры, находят на основе этих результатов функциональные зависимости погрешностей чувствительных элементов от их температур на момент начала функционирования, после этого определяют дифференциальные уравнения динамических моделей температурных погрешностей чувствительных элементов от воздействия мощности электропитания блока и температуры окружающей среды на основе полученных передаточных функций, а затем в рабочем режиме при включении блока определяют температуру чувствительных элементов в момент начала их функционирования, величину потребляемой блоком электрической мощности, температуру окружающей блок среды и производят алгоритмическую компенсацию температурных погрешностей чувствительных элементов инерциального измерительного блока, используя для этого решения в реальном масштабе времени, полученных с помощью вычислителя, следующих динамических математических моделей:
ωi(t)=ωpi(t)+ωci(t)+ωi(0),
где
 - нумерация чувствительных элементов в инерциальном измерительном блоке;
- нумерация чувствительных элементов в инерциальном измерительном блоке;
ωi(t) - рабочая модель общей температурной погрешности i-гo чувствительного элемента блока;
ωpi(t) - рабочая модель температурной погрешности i-гo чувствительного элемента от воздействия мощности электропитания блока, которая определяется в результате решения с помощью вычислителя дифференциального уравнения;

где
P1(t) - рабочая мощность электропитания блока;
 - исходное калибровочное значение погрешности i-гo чувствительного элемента на момент скачкообразного воздействия мощности электропитания;
- исходное калибровочное значение погрешности i-гo чувствительного элемента на момент скачкообразного воздействия мощности электропитания;
 - установившееся калибровочное значение погрешности после скачкообразного воздействия мощности электропитания;
- установившееся калибровочное значение погрешности после скачкообразного воздействия мощности электропитания;
n - порядок дифференциального уравнения, определяемый при калибровке;
 - коэффициенты динамической модели погрешности, определяемые при калибровке;
- коэффициенты динамической модели погрешности, определяемые при калибровке;
ωci(t) - рабочая модель температурной погрешности i-гo чувствительного элемента от воздействия окружающей среды, которая находится в результате решения с помощью вычислителя следующего дифференциального уравнения:

где
Θc(t) - рабочая температура окружающей блок среды;
 - исходное калибровочное значение погрешности i-гo чувствительного элемента на момент скачкообразного воздействия, связанного с изменением температуры окружающей блок среды;
- исходное калибровочное значение погрешности i-гo чувствительного элемента на момент скачкообразного воздействия, связанного с изменением температуры окружающей блок среды;
 - установившееся калибровочное значение погрешности после скачкообразного воздействия температуры окружающей среды;
- установившееся калибровочное значение погрешности после скачкообразного воздействия температуры окружающей среды;
m - порядок дифференциального уравнения, определяемый при калибровке;
 - коэффициенты динамической модели погрешности, определяемые при калибровке;
- коэффициенты динамической модели погрешности, определяемые при калибровке;
ωi(0)=ωi(Θi0) - рабочее начальное значение погрешности i-гo чувствительного элемента в момент начала его функционирования;
ωi(Θi0) - функциональная зависимость погрешности i-гo чувствительного элемента от его температуры в момент начала функционирования, определяемая при калибровке;
Θi0 - рабочая температура i-гo чувствительного элемента в момент начала его функционирования.
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ СКОРОСТИ ДРЕЙФА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2011 |
|
RU2480713C1 |
| Способ термостабилизации чувствительного элемента инерциальной системы | 2016 |
|
RU2659326C2 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550298C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| СПОСОБ КОМПЕНСАЦИИ СИСТЕМАТИЧЕСКОЙ СОСТАВЛЯЮЩЕЙ ДРЕЙФА НУЛЕВОГО СИГНАЛА ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2019 |
|
RU2695439C1 |
| US 8005635 B2, 23.08.2011. | |||

