Изобретение относится к кораблестроению и может быть использовано при выполнении перевозки грузов надводным транспортом.
Известно устройство перевозки грузов надводным транспортом (см. Заявку №2012145362 RU), включающее корпус основного транспортного судна с членами экипажа с надводной его частью для размещения перевозимого груза, при этом введен дополнительный корпус транспортного судна без членов экипажа, который расположен параллельно корпусу основного транспортного судна и жестко с ним соединен общими полыми трубами жесткости, которые также соединены с последовательно расположенными между ними подводными лодками. При этом в кормовой части подводные лодки выполнены с гребными винтами для перемещения основного и дополнительного транспортного судна в заданном направлении (прототип).
Известное устройство имеет технологические и технические возможности, которые заключаются в том, что перевозка груза выполняется функционально соединенными между собой двумя транспортными суднами, между которыми располагают подводные лодки.
Недостатком известного технологического и технического решения является то, что для перевозки грузов используют основное и дополнительное транспортное судно, когда могут быть использованы две платформы, при этом позиционное положение подводных лодок, которые позиционно расположены между транспортными суднами для активизации грузоподъемности надводного транспорта, приводит к его неустойчивости при проведении загрузки груза, поскольку активизируется «рычаг».
Технологически результатом предложенного изобретения является упрощение конструкции и повышение устойчивости надводного транспорта при выполнении загрузочных и разгрузочных работ.
Указанный технологический результат достигается следующим способом.
Способ формирования надводного транспорта для перевозки грузов, включающий параллельное расположение корпуса основного транспортного судна с надводной частью и с членами экипажа и корпуса дополнительного транспортного судна с надводной частью без членов экипажа для размещения перевозимого груза, которые соединяют между собой общими полыми трубами жесткости, с нижней части которых располагают и фиксируют герметичные воздушные сосуды оптекаемой цилиндрической конфигурации для активизации грузоподъемности надводного транспорта, а в кормовой части между основным и дополнительным транспортным судном к полым трубам жесткости фиксируют подводный аппарат с ходовым винтом, при этом надводную часть корпуса основного и дополнительного транспортного судна выполняют в виде платформы, которые позиционно располагают и фиксируют над общими полыми трубами жесткости, при этом герметичные воздушные сосуды оптекаемой цилиндрической конфигурации для активизации грузоподъемности позиционно располагают вдоль платформы основного транспортного судна по одну сторону борта, а вдоль платформы дополнительного транспортного судна по другую сторону борта, при этом между платформами в носовой части располагают лопасть изменения направления движения надводного транспорта, которую выполняют с возможностью разворота и фиксируют с верхней части полых труб жесткости.
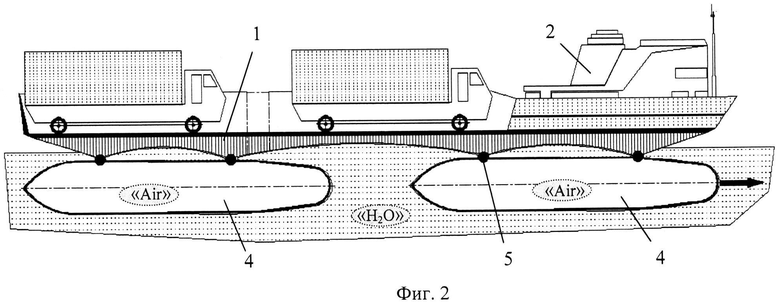
На фиг.1 и 2 изображена схемная реализация надводного транспорта и включает платформу 1 с кабиной 2, дополнительную платформу 3 без кабины, воздушные «Air» герметичные сосуды оптекаемой цилиндрической конфигурации 4, полые трубы жесткости 5, подводный аппарат 6 с ходовым винтом 7, лопасть 8 изменения направления движения надводного транспорта.
Реализуют способ формирования надводного транспорта для перевозки грузов следующим образом.
Для формирования надводного транспорта для перевозки грузов надводную часть корпуса основного и дополнительного транспортного судна выполняют в виде платформы 1 с кабиной 2 и дополнительной платформы 3, которые позиционно располагают параллельно друг относительно друга и фиксируют над общими полыми трубами жесткости 5. При этом герметичные воздушные сосуды оптекаемой цилиндрической конфигурации 4 для активизации грузоподъемности позиционно располагают вдоль платформы 1 основного транспортного судна по одну сторону борта, а вдоль платформы 3 дополнительного транспортного судна по другую сторону борта, а между платформами 1 и 3, между которыми в кормовой части их фиксируют подводный аппарат 6 с ходовым винтом 7 для линейного перемещения надводного транспорта, а в носовой их части располагают лопасть 8 изменения направления движения надводного транспорта, которую выполняют с возможностью разворота в секторе «±β» и фиксируют с верхней части полых труб жесткости 5. При этом следует отметить, что расположение герметичных воздушных сосудов оптекаемой цилиндрической конфигурации 4 за противоположными бортами платформ 1 и 3 позволяет повысить устойчивость водного транспорта при выполнении погрузочных работ.
Использование изобретения позволяет за счет введения в устройство транспортного судна в виде двух платформ с герметичными воздушными подводными сосудами оптекаемой цилиндрической конфигурации, позволяет упростить конструкцию и повысить устойчивость транспортного судна.
Изобретение относится к области судостроения и может быть использовано при выполнении перевозки грузов надводным транспортом. Предложен способ формирования надводного транспорта для перевозки грузов, включающий параллельное расположение корпуса основного транспортного судна с надводной частью и с членами экипажа и корпуса дополнительного транспортного судна с надводной частью без членов экипажа для размещения перевозимого груза, которые соединяют между собой общими полыми трубами жесткости, с нижней части которых располагают и фиксируют герметичные воздушные сосуды обтекаемой цилиндрической конфигурации для активизации грузоподъемности надводного транспорта. В кормовой части между основным и дополнительным транспортным судном к полым трубам жесткости фиксируют подводный аппарат с ходовым винтом. Надводную часть корпуса основного и дополнительного транспортного судна выполняют в виде платформы, которые позиционно располагают и фиксируют над общими полыми трубами жесткости. Герметичные воздушные сосуды обтекаемой цилиндрической конфигурации для активизации грузоподъемности позиционно располагают вдоль платформы основного транспортного судна по одну сторону борта, а вдоль платформы дополнительного транспортного судна по другую сторону борта. Между платформами в носовой части располагают лопасть изменения направления движения надводного транспорта, которую выполняют с возможностью разворота и фиксируют с верхней части полых труб жесткости. Технический результат заключается в упрощении конструкции и повышении устойчивости надводного транспорта при выполнении грузовых операций. 2 ил.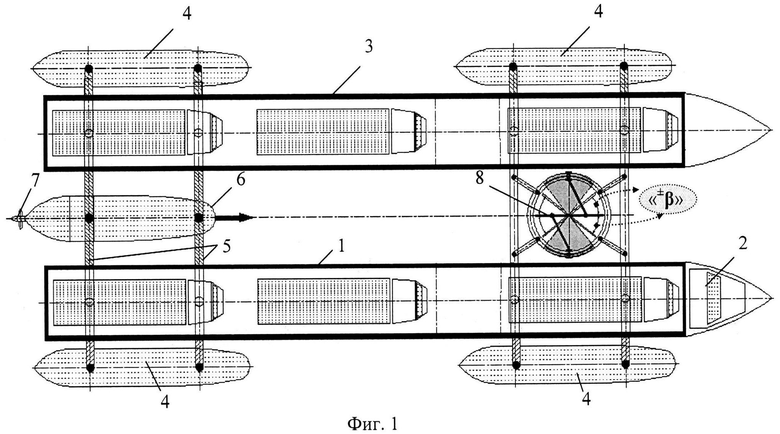
Способ формирования надводного транспорта для перевозки грузов, включающий параллельное расположение корпуса основного транспортного судна с надводной частью и с членами экипажа и корпуса дополнительного транспортного судна с надводной частью без членов экипажа для размещения перевозимого груза, которые соединяют между собой общими полыми трубами жесткости, с нижней части которых располагают и фиксируют герметичные воздушные сосуды обтекаемой цилиндрической конфигурации для активизации грузоподъемности надводного транспорта, а в кормовой части между основным и дополнительным транспортным судном к полым трубам жесткости фиксируют подводный аппарат с ходовым винтом, отличающийся тем, что надводную часть корпуса основного и дополнительного транспортного судна выполняют в виде платформы, которые позиционно располагают и фиксируют над общими полыми трубами жесткости, при этом герметичные воздушные сосуды обтекаемой цилиндрической конфигурации для активизации грузоподъемности позиционно располагают вдоль платформы основного транспортного судна по одну сторону борта, а вдоль платформы дополнительного транспортного судна по другую сторону борта, при этом между платформами в носовой части располагают лопасть изменения направления движения надводного транспорта, которую выполняют с возможностью разворота и фиксируют с верхней части полых труб жесткости.
| RU 94044954 A1, 10.10.1996 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМПАУНДНЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ | 1935 |
|
SU46970A1 |
| СУДНО | 1994 |
|
RU2108257C1 |
| Способ коррекции искажений электрических импульсов | 1956 |
|
SU108411A1 |
| СИСТЕМА СУДНО-ПОНТОНЫ | 0 |
|
SU388951A1 |
| СУДНО | 2005 |
|
RU2286284C2 |
| US 6550408 B1, 22.04.2003 | |||
| CN 103085945 A, 08.05.2013 | |||
| US 2009084303 A1, 02.04.2009 | |||
| US 4819576 A, 11.04.1989 | |||

