Область техники, к которой относится изобретение
Настоящее изобретение относится к блоку управления и способу для приведения в действие средств безопасности, а также к датчику для выдачи сигнала аварийной ситуации, согласно родовым понятиям соответствующих независимых пунктов формулы изобретения.
Уровень техники
Из публикации DE 10250920 A1 известно, что при передаче данных в системах безопасности посредством широтно-импульсной модуляции генерируемые импульсы настолько узки, что это может создавать проблемы в отношении электромагнитной совместимости.
Раскрытие изобретения
Предлагаемые в изобретении блок управления, способ и датчик, охарактеризованные в соответствующих независимых пунктах формулы, имеют по сравнению с известным решением то преимущество, что воздействие на фронты передаваемого (т.е. подлежащего передаче) цифрового сигнала посредством нескольких находящихся в составе интерфейса параллельно и одновременно включаемых источников тока эффективно способствует обеспечению электромагнитной совместимости (ЭМС). Воздействие на фронты сигналов позволяет осуществлять формирование этих фронтов в смысле обеспечения оптимальной ЭМС. В частности, осуществление изобретения создает возможность более простого и экономически рационального выполнения соответствующих норм по ЭМС. Прежде всего, изобретение позволяет полностью использовать потенциал современных специализированных интегральных схем (ASIC), которые реализуют, например, системный модуль в блоке управления надувными подушками безопасности, в отношении цифровых возможностей. Этим создается возможность так называемого формирования фронтов по ЭМС путем соответствующего управления нарастанием и спадом тока. Обеспечиваются меньший допуск, становится возможным соблюдение стандартов, и в целом уменьшаются затраты и достигается большая гибкость.
Таким образом, изобретение может применяться, в частности, в подобных системных специализированных интегральных схемах и в этом случае не требует дополнительных внешних компонентов. При этом под такими системными специализированными интегральными схемами следует понимать модули, которые включают в себя более чем одну лишь функцию чистой передачи данных в качестве приемопередатчика, т.е. они содержат приемопередатчик (трансивер) как один из нескольких схемных блоков; например, системные специализированные интегральные схемы в системах безопасности транспортных средств содержат приемопередатчики шины LIN как схемные блоки, используемые для присоединения периферийных датчиков или блоков управления датчиков посредством двухточечных (прямых) соединений или шинных систем.
Изобретение может применяться равным образом в системных специализированных интегральных схемах внешних датчиков систем безопасности транспортного средства, включающих в себя схемный блок токового интерфейса для подключения к двухточечным соединениям, квазишинам или шинам.
Изобретение делает возможным качественно лучшее формирование фронтов. Формирование фронтов можно лучше согласовывать с заданными интерфейсами и/или уровнями нагрузки шины. Гораздо лучше, чем, например, в аналогичных схемах, устраняется технологический и температурный разброс качества формирования фронтов.
Благодаря предлагаемому в изобретении формированию фронтов могут достигаться более высокие скорости передачи данных без дополнительных мер экранирования, реализуемых, например, подавлением чрезмерно высоких частотных составляющих во фронтах передаваемых сигналов с улучшением симметрии нарастающего и спадающего фронтов сигнала.
Воздействие источников тока на фронты сигналов происходит в заданном временном интервале, в зависимости от целевых времен нарастания или времен спадания. На оба логических уровня источники тока, если и влияют, то как постоянная составляющая.
Под блоком управления в контексте изобретения следует понимать электрический прибор, который обрабатывает сигналы датчиков и в зависимости от них выдает управляющие сигналы для средств безопасности. Средствами безопасности являются надувные подушки безопасности, преднатяжители ремней безопасности, активные подголовники, средства защиты пешеходов, а также активные средства безопасности, такие как тормоза и/или система регулирования динамики. "Приведение в действие" означает в контексте изобретения активизацию таких средств безопасности.
По меньшей мере один интерфейс предпочтительно является частью системной специализированной интегральной схемы. Вместе с тем, по меньшей мере один интерфейс может быть построен как отдельная интегральная схема или дополнительно при помощи дискретных компонентов. Возможна также реализация интерфейса на программном уровне (программными средствами).
Цифровой информационный сигнал может представлять собой один или несколько одиночных сигналов. Цифровая модуляция предпочтительно является амплитудной модуляцией, хотя при осуществлении изобретения могут использоваться и другие виды модуляции, такие как широтно-импульсная модуляция и т.д.
При изготовлении источников тока могут использоваться любые возможные схемные решения. Программными средствами может быть реализована и по меньшей мере одна часть такого источника тока. Источники тока могут быть выполнены, в частности, как классические токовые стоки (искусственная нагрузка по току). В частности, для источников тока может использоваться эталонный ток, который также может кратно увеличиваться посредством источника нормированных токов.
Фронтами сигнала являются скачкообразные изменения сигнала, обеспечивающие переход между значениями, представляющими логический нуль и логическую единицу.
Предлагаемым в изобретении датчиком является датчик, выдающий сигналы, относящиеся к аварийной ситуации или дорожно-транспортному происшествию, например сигналы столкновения, сигналы окружающей обстановки или же сигналы, несущие информацию о присутствии в транспортном средстве водителя/пассажиров, либо другие сигналы от датчиков, которые могут оказаться полезными с точки зрения корректного приведения в действие средств безопасности.
Приведенные в зависимых пунктах формулы изобретения мероприятия и усовершенствования характеризуют предпочтительные варианты раскрытых в независимых пунктах блока управления для приведения в действие средств безопасности, соответствующего способа и соответствующего датчика.
В одном варианте для нескольких источников тока может быть предусмотрено средство управления, которое для воздействия на фронты сигнала переключает посредством цифровых сигналов источники тока в заданные моменты времени, причем первая тактовая частота переключения источников тока превышает тактовую частоту передачи данных. В этом предпочтительном варианте осуществления изобретения источники тока переключаются в зависимости от управляющего сигнала, обычно - непосредственно кодовым словом декодера, для достижения соответствующего суммарного тока. Этот суммарный ток накладывается на цифровой сигнал, причем переключение источников тока выполняется с тактовой частотой, намного большей, чем тактовая частота передачи данных, что позволяет в малом временном интервале точно изменять и формировать фронт информационного сигнала.
Указанное средство управления представляет собой, например, декодер или другую часть схемы, способную обрабатывать сигналы и в зависимости от них выдавать для управления другие сигналы.
Также целесообразен вариант, в котором интерфейс включает в себя схему обнаружения, предназначенную для обнаружения выдачи цифрового сигнала, счетчик, запускающийся в зависимости от сигнала обнаружения, сгенерированного схемой обнаружения, и декодер, управляющий переключением источников тока в зависимости от состояния счетчика. В этом варианте интерфейс узнает посредством схемы обнаружения о запланированной передаче данных. Если это действительно так, то запускается счетчик, состоянием которого активизируется декодер, который в зависимости от состояния счетчика управляет переключением источников тока, например, путем выдачи соответствующих кодовых слов, которые определяют, которые источники тока в данный момент времени должны переключиться, а которые - нет. Схема обнаружения представляет собой, например, часть интегральной схемы, сконфигурированную для обнаружения фронтов. Счетчик является, например, шестиразрядным и запускается в зависимости от сигнала обнаружения, а декодер преобразует состояние счетчика в кодовые слова так, чтобы источники тока переключались в зависимости от этих кодовых слова декодера. Возможен вариант, в котором кодовые слова декодера являются жестко (аппаратно) зашитыми или определяются, например через другой интерфейс, микроконтроллером блока управления. Здесь возможны и другие варианты воздействия, которые, в частности, отражают текущую нагрузку шины. Однако поскольку нагрузка шины обычно априори известна, вполне можно предусмотреть подобную жесткую прошивку. Также может быть предусмотрен вариант с подачей сигнала, выбираемого из различных жестко зашитых комбинаций кодовых слов декодера, и тогда такой сигнал оптимально соответствует имеющейся нагрузке шины.
Интерфейс может включать в себя ровно четыре источника тока, поскольку четырех источников тока оказалось достаточно для осуществления соответствующего контроля фронтов информационных сигналов. При большем числе источников тока можно обеспечить более точное формирование фронтов, а при меньшем числе источников тока формирование фронтов будет менее точным.
Предпочтительным показал себя вариант, в котором тактовая частота, используемая для переключения источников тока, в сто раз превышает тактовую частоту передачи данных. Это позволяет выполнять формирование фронтов с очень высокой точностью, поскольку при использовании такой высокой тактовой частоты можно индивидуально задавать, путем переключения источников тока, множество точек фронта.
Также может быть предусмотрена схема воздействия для воздействия на значения тока соответствующих источников тока. Эта схема воздействия также может быть частью системной специализированной интегральной схемы, в другом же варианте она может быть по меньшей мере частично реализована на программном уровне. При этом возможна также внешняя реализация схемы воздействия, т.е. реализация за пределами системной специализированной интегральной схемы. Воздействие на значения тока можно оказывать индивидуально для отдельных источников тока или в отношении центрального значения, изменение которого влечет за собой изменение значений у всех источников тока.
Кроме того, интерфейс, как это уже отмечено выше, может быть расположен на интегральной схеме, реализующей другие функции блока управления. Это позволяет реализовать так называемую системную специализированную интегральную схему. Упомянутыми другими функциями блока управления являются, например, функции схемы воспламенения с электрически управляемыми силовыми выключателями, фнукция контроллера безопасности, который параллельно с микроконтроллером проверяет данные от датчиков на предмет наличия или отсутствия необходимости приведения в действие средств безопасности, и функция электроснабжения блока управления, а также управления и контроля энергоснабжения/энергопотребления. Кроме того, в блоке управления может быть расположено несколько таких интегральных схем.
Краткое описание чертежей
Ниже рассматриваются варианты осуществления изобретения, поясняемые чертежами, на которых показано:
на фиг.1 - предлагаемый в изобретении блок управления с подключенными компонентами,
на фиг.2 - блок-схема используемого в соответствии с изобретением интерфейса,
на фиг.3 - приемная схема,
на фиг.4 - первый вариант выполнения источника тока, используемого в соответствии с изобретением,
на фиг.5 - второй вариант выполнения источника тока, используемого в соответствии с изобретением, и
на фиг.6 - блок-схема осуществления предлагаемого в изобретении способа.
Осуществление изобретения
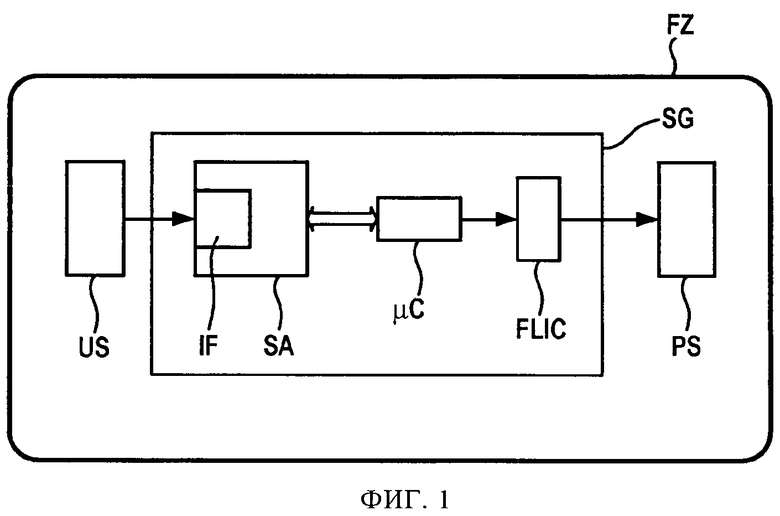
На фиг.1 показан блок управления SG предлагаемого типа с подключенными к нему компонентами в транспортном средстве FZ. Для наглядности на чертеже представлены лишь компоненты, необходимые для понимания изобретения. Другие компоненты, которые необходимы для работы блока управления, но не способствуют пониманию сущности изобретения, для упрощения на чертеже не показаны.
Датчик US аварийной ситуации подключен к блоку управления SG, a именно к системной специализированной интегральной схеме SA. Эта системная специализированная интегральная схема SA имеет интерфейсную часть IF, которая в дальнейшем называется интерфейсом и с которой могут быть связаны датчики аварийной ситуации. К таким датчикам относятся не только датчики столкновения, такие как датчики ускорений, датчики давления воздуха и датчики корпусного шума, но и датчики окружающей обстановки, такие как радарные, ультразвуковые и/или лидарные датчики, а также датчики присутствия, а при необходимости, и веса водителя и пассажиров или позы, в которой они находятся. Возможен также вариант, в котором могут быть предусмотрены и другие датчики, подпадающие под понятие "датчик US аварийной ситуации". В упрощенном представлении подобные датчики аварийной ситуации расположены вне блока управления SG. Вместе с тем, такие датчики аварийной ситуации также могут быть расположены, по меньшей мере частично, в блоке управления SG. Системная специализированная интегральная схема SA, имеет, как указано выше, дополнительные функции, которые, однако, в данном случае играют второстепенную роль и поэтому в описании вообще не рассматриваются. Системный модуль SA связан с микроконтроллером µC для передачи в микроконтроллер µC сигналов, например сигналов от датчиков US аварийной ситуации. Микроконтроллер µC обрабатывает сигналы датчиков таким образом, чтобы обеспечить возможность принятия решения относительно приведения в действие средств безопасности PS. Команда на приведение в действие средств безопасности, формируемая на основе этого решения, передается в схему воспламенения FLIC. Эта схема воспламенения FLIC может быть частью системной специализированной интегральной схемы. Схема воспламенения FLIC имеет электрически управляемые силовые выключатели, подающие ток на воспламенители надувной подушки безопасности или другие исполнительные устройства и таким образом обеспечивающие приведение в действие средств безопасности. Передача данных, например, в направлении от датчиков US аварийной ситуации или к этим датчикам, может сопровождаться излучением электромагнитных полей, особенно при переходах между уровнями напряжения в форме крутых фронтов. Поэтому в соответствии с изобретением эти переходы формируют таким образом, чтобы свести это излучение к минимуму. Для формирования этих переходов используются источники тока, которые включены в состав интерфейса IF и тактируются с очень высокой частотой, по сравнению с тактовой частотой передачи данных (тактовой частотой информационного сигнала), а значит, обеспечивают точное формирование этих фронтов: как спадающего, так и нарастающего фронта.
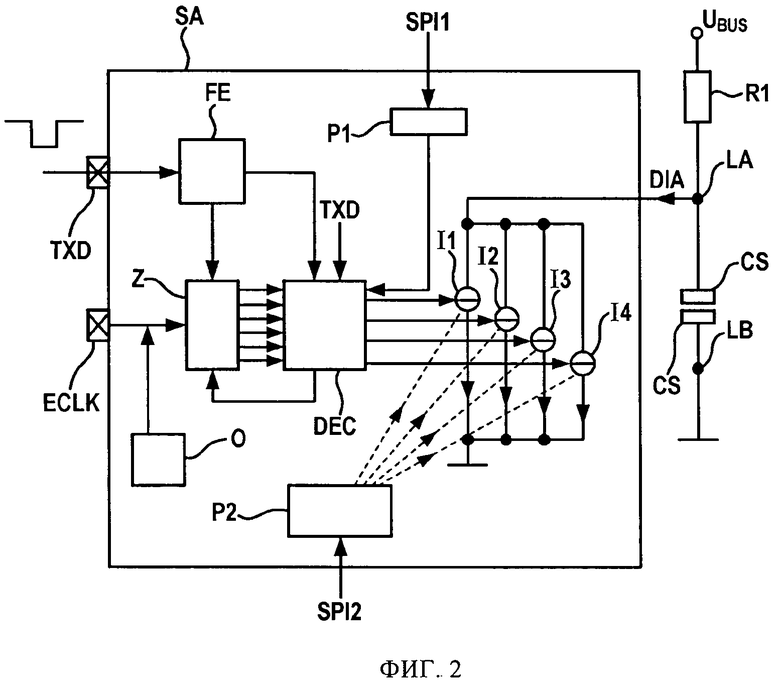
На фиг.2 приведен пример используемого в соответствии с изобретением интерфейса, причем в составе системной специализированной интегральной схемы SA показаны лишь ее компоненты, относящиеся к сущности изобретения. В системной специализированной интегральной схеме предусмотрена схема FE обнаружения фронтов, которая распознает, что источник, например внешний по отношению к специализированной интегральной схеме микроконтроллер, или же схемный блок специализированной интегральной схемы, который можно сравнить с микроконтроллером, желает передать другим компонентам данные, а именно данные TXD. Передача этих данных осуществляется в форме цифрового сигнала. Если схема FE обнаружения фронтов обнаружит в сигнале TXD спадающий фронт, она активизирует счетчик Z, в данном случае шестиразрядный счетчик. Этот счетчик управляется синхроимпульсами с частотой ECLK, которая в рассматриваемом случае составляет 2 МГц и стократно превышает используемую в данном случае тактовую частоту передачи данных (тактовая частота информационного сигнала). Как вариант, тактовая частота счетчика может генерироваться, или генерироваться по меньшей мере частично, внутренним генератором O специализированной интегральной схемы.
Схема FE обнаружения фронтов сообщает декодеру DEC о том, обнаружен ли спадающий или нарастающий фронт. Также счетчик Z передает декодеру свое состояние. Кроме того, в декодер DEC подается передаваемый информационный сигнал TXD. Декодер DEC в зависимости от достигнутого состояния счетчика формирует соответствующие новые заранее заданные кодовые слова: например, для 64 значений состояния шестиразрядного (N-разрядного) счетчика при состоянии 0-1 счетчика может выдаваться четырехразрядное (≤N-разрядное) кодовое слово DW1 декодера, при состоянии 2-4 счетчика - четырехразрядное кодовое слово декодера и т.д. Эти кодовые слова декодера выдаются на четыре (≤N) источника тока 11, 12, 13 и 14. Иначе говоря, декодер DEC выдает векторы тока, определяющие то, которые из источников тока 11, 12, 13 или 14 переключаются, а которые нет.
На фиг.2 изображен интерфейс приемопередатчика, выполняющий предусмотренное изобретением формирование фронтов сигналов. Передаваемый сигнал TXD генерируется микроконтроллером µC или же другими схемными блоками системной специализированной интегральной схемы SA. Задача представленной на фиг.2 схемной части заключается в том, чтобы подвергать существующую в цифровой форме информацию предварительной обработке в виде серии следующих друг за другом информационных битов таким образом, чтобы эту информацию можно было передавать по линии передачи удаленному датчику без сильного помехового излучения. Под удаленным датчиком следует понимать, например, периферийный датчик, т.е. датчик, находящийся вне блока управления.
Для этого в соответствии с изобретением цифровой сигнал усиливается задающим каскадом с источниками тока 11-14 таким образом, что, несмотря на имеющуюся нагрузку шины, поток данных может корректно передаваться приемникам, удаленным на несколько метров. Для этого потребовался бы только сигнал TXD и управляемый им источник задающего тока, например токовый сток. Для интерфейса шины LIN, например, их значения были бы равны 50 мА. Однако при необходимой для фильтрации высокочастотных составляющих емкостной нагрузке шины это приводит к формированию быстро спадающего фронта напряжения, определяемого токовым стоком (50 мА) и общей емкостью шины и медленнее нарастающего фронта напряжения, определяемого исключительно подтягивающими (нагрузочными) резисторами, по меньшей мере одним резистором, и общей емкостью шины. Этим обусловливается сильная несимметричность спадающего и нарастающего фронтов сигнала, зависящая от уровня напряжения на шине. Общей оптимизации спадающих и нарастающих фронтов сигнала на шине в данном примере можно достичь, обеспечив достаточное временное разрешение во временном интервале спадающего и нарастающего фронтов с управлением по TXD, с помощью вспомогательной тактовой частоты в форме системной тактовой частоты либо ее кратного или с помощью внутреннего по отношению к специализированной интегральной схеме генератора.
В случае интерфейса шины LIN с длительностью бита 50 мкс с этой целью может использоваться, например, тактовая частота 2 МГц, а в случае шин подключения датчиков, где длительность бита составляет, например, 8 мкс, может использоваться, например, тактовая частота 12,5 МГц. В основе этой оценки лежит то допущение, что хорошие результаты формирования фронтов можно получить, если разрешение, используемое для изменения формы фронта, обеспечивается в сто раз более быстрым сигналом.
Входной сигнал TXD распознается схемой FE обнаружения фронтов. Если фронт сигнала спадающий, запускается N-разрядный, в данном случае шестиразрядный, счетчик Z, который тактируется с подходящей частотой, описанной выше. К декодеру DEC подключено N, в данном случае шесть, первичных выходов счетчика Z. Соответственно заранее заданным состояниям счетчика декодер каждый раз вновь устанавливает управляющие сигналы, направляемые источникам тока. Источниками тока являются, как указано выше, токовые стоки или, при необходимости, так называемые высоковольтные источники, представленные электрически управляемыми транзисторами, предпочтительно n- или p-канальными полевыми МОП-транзисторами в составе системной специализированной интегральной схемы SA. В случае спадающего фронта значения тока, по мере изменения состояния счетчика от 0 до 38, например с временным интервалом 0,5 мкс, могут пошагово, т.е. каждые 0,5 мкс и так до 19 мкс, возрастать от 3,5 мА до 52,5 мА. Таким образом, имея четыре источника тока, первый 11 из которых имеет значение 3,5 мА, второй 12 - значение 7 мА, третий 13 - значение 14 мА и четвертый 14 - значение 28 мА, можно сформировать фронт, в данном случае спадающий фронт. С помощью этого изменяющегося во временном интервале фронта диагностического тока IDIA формируется фронт (напряжение). До достижения нового кодового слова декодера для управления источниками тока сохраняется прежний выходной вектор. Во избежание получения запаздывания между специализированной интегральной схемой и передаваемыми данными TXD, поступающими в момент генерирования частоты ECLK, как вариант, выдавать первый выходной вектор источникам тока для состояния счетчика 0 можно сразу при TXD=0 после спадающего фронта. При использовании N-разрядного счетчика для спадающего фронта напряжения можно использовать максимум M≤2N кодовых слов декодера. В рассмотренном выше примере при использовании шестиразрядного счетчика и разрешения 0,5 мкс для получения заданного спадающего фронта напряжения используются 14 кодовых слова декодера и тем самым 14 изменений диагностического тока. Путем соответствующего выбора кодовых слов декодера можно произвольным образом смешивать эквидистантные изменения тока с неэквидистантными изменения тока. Число источников тока обычно больше или равно одному.
Если после прохождения спадающего фронта сигнала TXD счетчик дошел до состояния, соответствующего кодовому слову декодера "стоп", декодер DEC инициирует остановку счетчика Z. Соответственно этому кодовому слову декодера на источники тока 11-14 теперь выдается вектор тока выдержки, например 52,5 мА, как это указано выше. Этот вектор тока выдержки сохраняется до тех пор, пока не подойдет нарастающий фронт бита цифрового информационного сигнала TXD.
Если схема FE обнаружения фронтов обнаружила нарастающий фронт, происходит обнуление счетчика Z путем его сброса и инициируется запуск счетчика, в результате чего декодером DEC на источники тока выдается новый вектор тока. На дальнейшую форму нарастающего фронта напряжения на выходе DIA оказывается воздействие предписанной величиной соответствующих заранее заданных векторов тока, как и в случае спадающего фронта (как правило, предварительно задаваемое определение векторов тока для формирования нарастающих фронтов отличается от предварительно задаваемого определения векторов тока для формирования спадающего фронта).
Определение соответствующих векторов тока и их временное позиционирование осуществляется на основании физической нагрузки шины, например подтягивающего (нагрузочного) резистора или подтягивающих резисторов шины или общей емкости шины. Если для нарастающего фронта счетчик Z достиг состояния, соответствующего кодовому слову декодера "стоп", как правило, выдается вектор тока (выдержки), который приводит к тому, что диагностический ток становится равен нулю. Кодовые слова декодера для задания нового вектора тока могут быть жестко зашиты посредством маски для изготовления специализированной интегральной схемы или могут фиксированно выбираться путем так называемой подгонки с использованием стабилитронов, либо могут гибко программироваться микроконтроллером µC с помощью соответствующего числа записываемых регистров через последовательный периферийный интерфейс (SPI-интерфейс) специализированной интегральной схемы. Эта возможность символически представлена блоком программирования P1, а также SPI-интерфейсом SPI1, идущим от микроконтроллера µC. К выводу DIA подведены, например, линии, или провода, LA и LB шины, причем информационный сигнал выводится через контакты CS. Для шин, действие которых основано на использовании уровней напряжения, используется подтягивающий (нагрузочный) резистор R1. В рассматриваемом случае дополнительно или в качестве альтернативы формирование фронтов может осуществляться путем настройки источников тока 11-14 модулем программирования P2, причем такая настройка также может быть фиксированной или может программироваться через SPI-интерфейс SPI2. Как отмечено выше, это также может происходить через воздействие на центральный фактор.
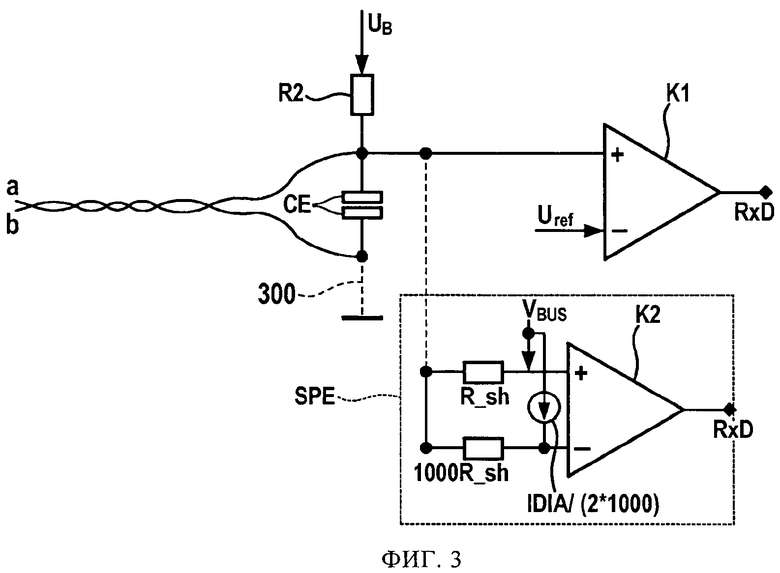
На фиг.3 показан приемник для сигнала, поступившего по линиям а и b. При использовании шины LIN используется только один провод, например линия а. Условием этого является то, что все абонентские устройства шины должны быть подключены к массе транспортного средства. Это подключение к массе условно обозначено на чертеже позицией 300.
На чертеже показаны приемные контакты CE, а также подтягивающий (нагрузочный) резистор R2, подключенный к напряжению UB на шине. Вместе с тем, в случае приемников, использующих уровни тока, без этого резистора можно обойтись. Обычно для обнаружения сигналов, передаваемых по линии LA, LB, принятое напряжение сравнивается с опорным напряжением UREF. В альтернативном варианте можно предусмотреть приемник SPE, использующий уровни тока и принимающий переданную информацию по изменениям тока на линии шины. Для этого ток шины, подаваемый от источника питания UB шины, направляется через шунт R_sh. Одновременно на вход компаратора, например со стороны плюсового (+) вывода, подается питающее напряжение шины Ukomp(+)=UB. Напряжение на другом конце шунта составляет относительно "земли" (GND) схемы: UDIA=UB-IDIA*R_sh. На втором входе компаратора, например со стороны минусового (-) вывода, посредством высокого уровня (подтягивающий источник тока) с силой тока I=(1/1000)*IDIA/2 через резистор 1000*R_sh поддерживается напряжение Ukomp(-)=UB+1000R_sh*(1/1000)*IDIA/2=UDIA*(IDIA/2)*R_sh.
В отсутствие передачи по шине бита информации, т.е. когда амплитуда тока равна нулю: IDIA=0, напряжение UDIA=UB=UKomp(+). UKomp(-)=UB+(IDIA/2)*R_sh.→RxD имеет уровень "0", поскольку UKomp(-)>UKomp(+). При обмене данными в форме бита информации с амплитудой тока IDIA напряжение UDIA-UB-IDIA*R_sh, UKomp(+)-UB, UKomp(-)-UB-IDIA/2*Rsh. В результате компаратор переходит на выдачу уровня "1", поскольку UKomp(-)<UKomp(+). Таким образом, устойчивость приемника определяется сопряжением с определенным жестко заданным (постоянным) порогом, образованным половиной ожидаемой амплитуды тока бита информации. Для восприятия порогового тока (1/1000)*IDIA/2 необходима незначительная нагрузка шины на "землю". Для установки порога могут использоваться и другие уровни тока, но при этом к ним нужно подобрать шунт и нагрузку шины.
Компаратор K1 имеет вход питания, на который поступает напряжение 3,3 В, т.е. цифровое напряжение питания. То же самое относится и к компаратору K2. Как вариант, массу 300 можно не использовать, если компараторы работают по отношению к линии b, например, при использовании включенных далее оптикоэлектронных устройств связи.
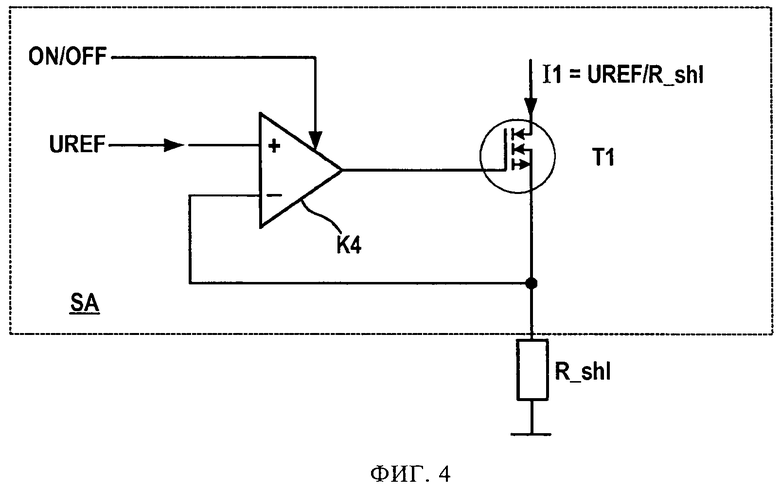
На фиг.4 показан первый вариант выполнения источников тока, используемых в соответствии с изобретением, например в устройстве для формирования фронтов, показанном на фиг.2. Для этого предусмотрен регулятор тока, выполненный в виде стабилизированного источника тока. Опорное напряжение UREF генерируется в системной специализированной интегральной схеме SA в виде так называемой межпороговой зоны напряжений. Кроме того, предусмотрен шунтирующий резистор R_SH1 с точно подобранным сопротивлением, имеющим небольшую температурную характеристику. Этот шунтирующий резистор R_SH подключен к интегральной схеме извне, поскольку в составе специализированных интегральных схем такие резисторы невозможно изготавливать обычными процессами смешивания с достаточной точностью. Операционный усилитель K4 управляет транзистором T1, выполненным в виде n-канального полевого МОП-транзистора, таким образом, что напряжение на R_SH1 равно опорному напряжению, и, соответственно, устанавливается ток IDIA=UREF/R_SH1. Если текущее опорное напряжение формируется выходным вектором (кодовое слово декодера), например UREF=S0*UREF0+S1*UREF1+S2*UREF2+S3*UREF3, где (S0, S1, S2, S3)=двоичное кодовое слово декодера (вектор), a UREF0, UREF1, UREF2, UREF3 - составляющие межпороговой зоны напряжений Ubgap, генерируемой внутри специализированной интегральной схемы, то каждым новым кодовым словом декодера может задаваться новый диагностический ток IDIA. Используемый вектор может составлять и более четырех бит.
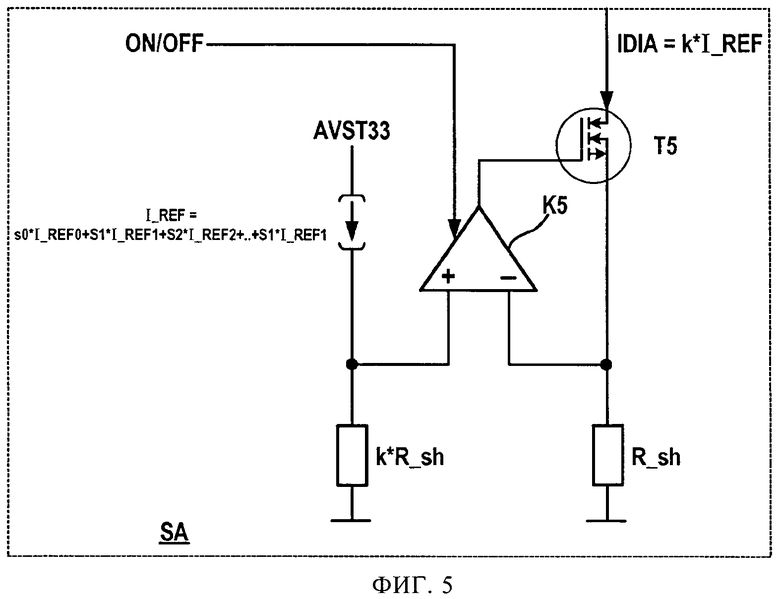
Еще один вариант осуществления изобретения отражен на фиг.5, где опять же на системной специализированной интегральной схеме SA выполнен стабилизированный источник тока. Этот вариант, прежде всего, требует наличия в составе специализированной интегральной схемы не показанного на чертеже источника нормированных токов, задаваемых опорным напряжением UREF, которое опять же формируется на основе межпороговой зоны напряжений, и внешним резистором с точно подобранным сопротивлением. Таким образом, можно генерировать базовые токи верхнего уровня IREF0, IREF1, IREF2…IREFL, которые могут выделяться из источника нормированных токов с использованием известной техники токовых зеркал. С помощью управляющего вектора S0, S1, S2…SL можно сформировать суммарный ток I_REF=S0*I_REF0+S1*I_REF1+… Это символизируется источником тока I_REF.
Применением двух согласованных резисторов с сопротивлением R_SH и кратным ему сопротивлением K*R_SH можно сформировать точный и стабильный по температуре ток IDIA=K*I_REF, поскольку сопротивления хотя и не совпадают точно, но их отношение характеризуется практически постоянным коэффициентом K. Этот коэффициент является геометрическим коэффициентом размера. В специализированных интегральных схемах этот коэффициент можно точно задать, поскольку он связан с очень высокой точностью масок, используемых в процессах изготовления полупроводниковых устройств. Температурная характеристика также хороша, поскольку резисторы одного типа не различаются свойствами материала. Рассмотренный вариант особенно выгоден при его использовании в специализированных интегральных схемах с центральным формированием сигнала опорного тока для генерирования тока передачи IDIA, поскольку для этого не требуются дополнительные внешние компоненты или штыревые контакты. При этом операционный усилитель K5 управляет транзистором T5 соответственно. Здесь необходим только один большой выходной транзистор T5, поскольку посредством управляющего вектора декодера выбираются весовые коэффициенты суммы опорных токов для обобщенно представленного источника I_REF. Это приводит к рациональному решению, поскольку при этом имеются только малые опорные токи, а выходной ток диагностического драйвера формируется отношением K шунтирующих сопротивлений.
Еще один вариант осуществления изобретения предусматривает использование классических источников тока в виде стоков, причем вектор тока декодера определяет включаемый токовый сток, как это предусматривается схемой на фиг.2. Эта классическая возможность избегает недостатков первого варианта, показанного на фиг.4, а именно применения специфического для шины LIN внешнего шунтового штыревого контакта, однако не может обеспечить столь экономного использования поверхности драйвера шины LIN. Также, основываясь на применении центрального источника нормированных токов, можно с помощью токовых зеркал с соответствующими коэффициентами отражения получить из источника нормированных токов любой ток источника IREF1. Поскольку эти источники используются для формирования тока IDIA непосредственно, и ток, уменьшенный на коэффициент K, как это предусмотрено во втором варианте, не применяется, потребная площадь поверхности больше, чем в упомянутом втором варианте, при той же точности.
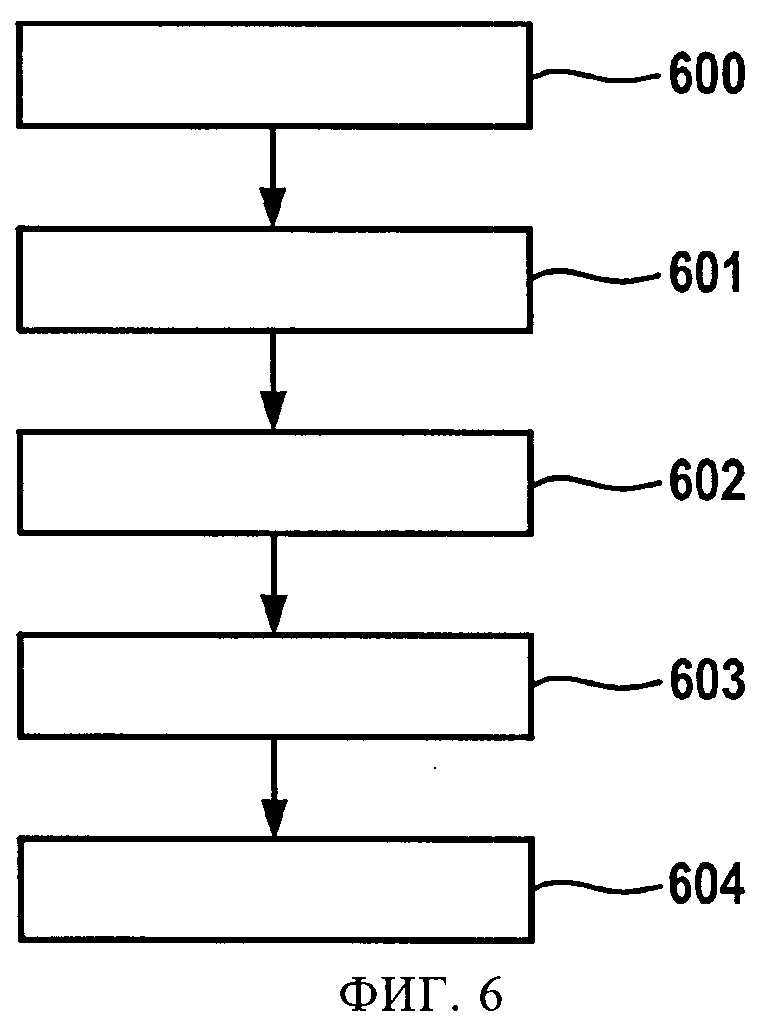
На фиг.6 представлена блок-схема осуществления предлагаемого в изобретении способа. На шаге 600 происходит обнаружение предстоящей передачи сигнала, а именно сигнала TXD. На шаге 601 передается информация о виде проходящего фронта, т.е. фронта нарастающего или спадающего. Затем, на шаге 602, обнаружение фронта вызывает запуск счетчика, и на шаге 603 декодер в зависимости от состояния счетчика задает векторы тока для соответствующего переключения источников тока. Таким образом, далее на шаге 604 выполняется соответствующее формирование фронта. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2002 |
|
RU2220440C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА, ПРЕОБРАЗОВАНИЯ И СИНХРОНИЗАЦИИ ЦИФРОВОГО ДИФФЕРЕНЦИАЛЬНОГО СИГНАЛА | 2004 |
|
RU2279182C1 |
| ДЕКОДЕР ДИФФЕРЕНЦИАЛЬНОГО СИГНАЛА КОДА RZ | 2005 |
|
RU2291560C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2001 |
|
RU2202121C2 |
| БЛОК УПРАВЛЕНИЯ И СПОСОБ ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ СРЕДСТВ БЕЗОПАСНОСТИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2518200C2 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОЧНОСТИ КРЫЛА ВОЗДУШНОГО СУДНА | 2011 |
|
RU2469289C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2001 |
|
RU2207614C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| МУЛЬТИПЛЕКСОР ПЕРЕДАЧИ ДАННЫХ | 2005 |
|
RU2295148C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПОСЛЕДОВАТЕЛЬНОГО ДВОИЧНОГО КОДА В ПАРАЛЛЕЛЬНЫЙ КОД | 2001 |
|
RU2188502C1 |
Изобретение относится к области управления для приведения в действие средств безопасности. Достигаемый технический результат - обеспечение электромагнитной совместимости используемых для управления сигналов. Заявлены блок управления и способ для приведения в действие средств безопасности, а также датчик для выдачи сигнала аварийной ситуации. Блок управления для приведения в действие средств безопасности содержит, по меньшей мере, один интерфейс, выдающий цифровой информационный сигнал, который включает в себя несколько параллельно и одновременно включаемых источников тока для воздействия на фронты цифрового информационного сигнала. 3 н. и 7 з.п. ф-лы, 6 ил.
1. Блок управления (SG) для приведения в действие средств безопасности (PS), содержащий по меньшей мере один интерфейс (IF), выдающий цифровой информационный сигнал, отличающийся тем, что указанный по меньшей мере один интерфейс (IF) включает в себя несколько параллельно и одновременно включаемых источников тока (I1-I4) для воздействия на фронты цифрового информационного сигнала.
2. Блок управления по п.1, отличающийся тем, что для нескольких источников тока (I1-I4) предусмотрено средство управления, которое для воздействия на фронты сигнала переключает посредством цифровых сигналов источники тока в заданные моменты времени, причем первая тактовая частота переключения источников тока превышает тактовую частоту передачи данных.
3. Блок управления по п.2, отличающийся тем, что интерфейс (IF) включает в себя схему (FE) обнаружения, предназначенную для обнаружения выдачи цифрового сигнала, счетчик (Z), запускающийся в зависимости от сигнала обнаружения, сгенерированного схемой (FE) обнаружения, и декодер (DEC), управляющий переключением источников тока в зависимости от состояния счетчика.
4. Блок управления по п.1, отличающийся тем, что интерфейс (IF) включает в себя четыре источника тока (I1-I4).
5. Блок управления по п.2, отличающийся тем, что тактовая частота по меньшей мере в сто раз превышает тактовую частоту передачи данных.
6. Блок управления по п.1, отличающийся тем, что предусмотрена схема воздействия для воздействия на значения тока соответствующих источников тока (I1-I4).
7. Блок управления по п.1, отличающийся тем, что по меньшей мере один интерфейс (IF) расположен на интегральной схеме (SA), реализующей другие функции блока управления.
8. Датчик для выдачи сигнала аварийной ситуации в виде цифрового информационного сигнала, отличающийся тем, что интерфейс датчика выполнен согласно одному из пп. 1-7.
9. Способ приведения в действие средств безопасности (PS), включающий в себя приведение в действие средств безопасности в зависимости от цифрового информационного сигнала, отличающийся тем, что на фронты цифрового информационного сигнала воздействуют посредством нескольких параллельно и одновременно включаемых источников тока.
10. Способ по п.9, отличающийся тем, что для воздействия на фронты информационного сигнала источники тока (I1-I4) переключают посредством цифровых сигналов в заданные моменты времени, причем первая тактовая частота переключения источников тока превышает тактовую частоту передачи данных.
| US 5620202 A, 15.04.1997 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| КОМПЛЕКС ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 2004 |
|
RU2279117C2 |
| US 20020036430 A1, 28.03.2002 | |||

