Область техники, к которой относится изобретение
Настоящее изобретение относится к коррекции квадратурных ошибок, связанных с системами цифровой связи, и в особенности в цепи беспроводной передачи данных, в которой и повышающий преобразователь, и понижающий преобразователь имеют архитектуру прямого преобразования.
Предпосылки создания изобретения
Системы связи обычно имеют основную цифровую часть, в которой передаваемый сигнал должен быть обработан перед передачей, и дополнительную цифровую часть, в которой принятые сигналы обрабатываются после приема. Обработка в цифровых частях обычно выполняется в основной полосе частот, т.е. в полосе частот сигналов перед любым их смещением с целью передачи на несущей частоте; в основном, основополосные сигналы охватывают нулевые компоненты частоты, т.е. компоненты постоянного тока (DC). Основополосные сигналы состоят из синфазной (I) части и квадратурной (Q) части, т.е. имею сложную структуру. Обработка может содержать такие процессы, как фильтрация, кодирование, модуляция, демодуляция и декодирование. Как правило, необходимо преобразовать сигналы из аналоговой формы для передачи и приема, и в случае беспроводных систем, необходимо преобразовать сигналы в соответствующие радиочастоты.
Имеются различные подходы к преобразованию цифровых сигналов из основной полосы в радиочастоты и наоборот. Один подход предлагает преобразование в цифровом пространстве так, чтобы сложные основополосные сигналы были бы умножены, т.е. смешаны, местным цифровым гетеродином, чтобы перейти к более высокой частоте, часто называемой промежуточной частотой (IF), которая затем может быть преобразована в аналоговое пространство цифро-аналоговым преобразователем. Сигнал промежуточной частоты представляет собой обычный, а не сложный сигнал. Аналоговый сигнал затем может быть дополнительно преобразован в соответствующую частоту для передачи. Точно как же, на приемном конце сигналы преобразуются из аналоговой в цифровую форму на промежуточной частоте выше основной полосы частот, и затем преобразуются понижающим преобразованием в синфазные и квадратурные основополосные сигналы в цифровой форме. Преимущество этого подхода состоит в том, что преобразование основных комплексных сигналов в сигналы промежуточной частоты и наоборот выполняется в цифровом виде и не подвержено аналоговым ошибкам, которые могут вызвать различие при взаимодействии между синфазными и квадратурными каналами. Однако имеется и недостаток, заключающийся в том, что цифроаналоговые преобразователи и аналого-цифровые преобразователи, преобразующие сигналы промежуточной частоты, должны работать на более высокой частоте, чем основная полоса частот. Работа этих узлов на более высокой частоте означает, что такие узлы являются дорогостоящими и потенциально низкоэффективным с точки зрения разрешения, чем цифроаналоговые преобразователи и аналого-цифровые преобразователи более низкой частоты.
Альтернативный подход к преобразованию цифровых сигналов из частот основной полосы в радиочастоты и обратно называется методом прямого преобразования. В архитектуре прямого преобразования основная полоса синфазных и квадратурных сигналов преобразуется из аналоговой формы в цифровую и в аналоговую форму в основной полосе частот. При передаче аналоговые синфазные и квадратурные сигналы затем преобразуются в аналоговом пространстве аналоговыми квадратурными смесителями. Предпочтительно, повышающее преобразование до частоты радиопередачи осуществляется в одну стадию и, в результате, использование промежуточной частоты не требуется. Точно так же, на приемном конце преобразование принятых радиочастотных сигналов предпочтительно осуществляется непосредственно в синфазные и квадратурные аналоговые сигналы основной полосы, которые затем преобразуются в цифровом пространстве. Преимущество подхода прямого преобразования состоит в том, что соответствующие цифроаналоговые и аналого-цифровые преобразователи могут быть менее дорогими и иметь болеет высокую производительность с точки зрения разрешения. Кроме того, исключение стадии промежуточной частоты может привести к снижению производственных затрат из-за меньшего количества компонентов. Однако здесь имеется потенциальный недостаток, заключающийся в том, что синфазный и квадратурный сигнальные тракты включают аналоговые компоненты, такие как фильтры, которые подвержены изменению значений технических характеристик компонентов в пределах допуска так, что аналоговые свойства синфазного и квадратурного сигнальных трактов могут изменяться от оборудования к оборудованию и по значениям рабочей температуры.
Ошибки, которые вызывают искажение ортогональных синфазных и квадратурных каналов, которые существуют в цифровом пространстве, известны как квадратурные ошибки, или ошибки IQ. В частности могут возникнуть проблемы, если имеют место дифференциальные ошибки между синфазными и квадратурными каналами. Дифференциальные ошибки между синфазными и квадратурными каналами, например, могут инициировать ложное срабатывание компонентов в передатчике и радиопомехи в приемнике. В частности помеха может быть сформирована на противоположной стороне предназначенной полосы; например, если компонент сигнала назначен работать на более высокой частоте, чем сигнал местного гетеродина, то дифференциальная ошибка между синфазными и квадратурными компонентами может привести к появлению ложного компонента на частоте ниже частоты сигнала местного гетеродина.
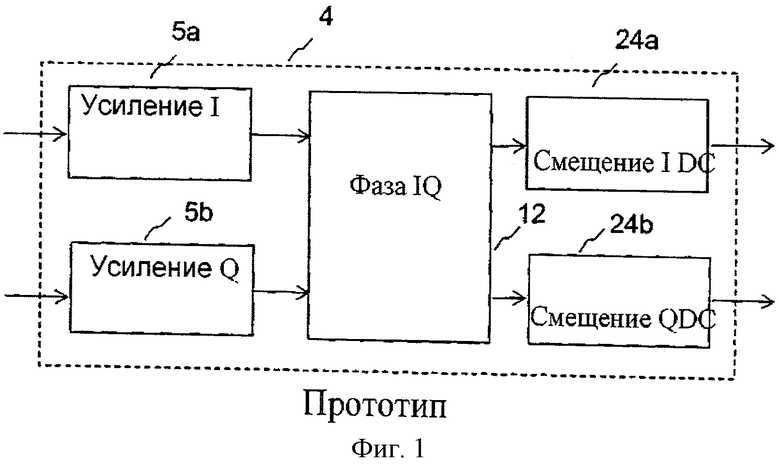
Квадратурные ошибки обычно имеют смещения напряжения, т.е. смещения DC, дифференциальные характеристики усиления между синфазным и квадратурным сигнальными трактами и фазовую ошибку между синфазным и квадратурным сигнальными трактами. Обычная схема 4 коррекции квадратурных ошибок для исправления таких квадратурных ошибок показана на фиг.1; блоки коррекции усиления: блок I усиления 5а и блок усиления Q 5b, как блок 12 для исправления фазовых ошибок между синфазным и квадратурным трактами, обозначенный фазой IQ, и блоки для коррекции смещений напряжения DC I смещений DC 24a и смещение DC Q 24b.
Однако квадратурные ошибки, и особенно дифференциальные квадратурные ошибки, как при повышающем преобразовании, так и при понижающем преобразовании могут зависеть от частоты в пределах основной полосы. Например, аналоговая фильтрация может вызвать такие ошибки, особенно в сглаживающих фильтрах, вследствие изменения значений аналоговых компонентов в пределах допуска и в зависимости от температуры. Обычные схемы коррекции не могут исправить такие ошибки.
Настоящее изобретение имеет целью устранить эти недостатки.
Краткое описание сущности изобретения
В соответствии с первой целью изобретения, обеспечивается способ управления цепью передачи. Цепь передачи содержит схему коррекции, квадратурный повышающий преобразователь и квадратурный понижающий преобразователь, при этом схема коррекции используется для исправления частотно-зависимой квадратурной ошибки между характеристикой передачи синфазного сигнального тракта и характеристикой передачи квадратурного сигнального тракта в квадратурном повышающем преобразователе, при этом квадратурный повышающий преобразователь используется при повышающем преобразовании сигнала, вводимого в схему коррекции, и квадратурный понижающий преобразователь используется для понижающего преобразования сигналов, принятых таким образом, при этом повышающий преобразователь имеет выход, соединенный с понижающим преобразователем, схема коррекции конфигурируется через набор значений коэффициентов отвода фильтра, и входной сигнал содержит частотные компоненты. В одном примере воплощения способ содержит следующие стадии:
связывание сигнала с выхода повышающего преобразователя с квадратурным понижающим преобразователем;
использование понижающего преобразователя для понижающего преобразования связанного с ним сигнала;
сравнение сигнала, преобразованного понижающим преобразованием, с входным сигналом; и
изменение значений коэффициентов отвода фильтра на основе сравнения, исправляя, таким образом, указанную частотно-зависимую квадратурную ошибку, путем коррекции, применяемой к указанному частотному компоненту, при этом указанная коррекция зависит от частоты указанного частотного компонента.
Преимущество управления цепью передачи с обновлением набора значений коэффициентов отвода фильтра на основе сравнения сигнала, преобразованного понижающим преобразованием, с входным сигналом является мерой, благодаря которой может быть достигнуто точное управление схемой коррекции, особенно через зависящую от частоты характеристику схемы коррекции.
В одном устройстве сигнал, преобразованный понижающим преобразованием, сравнивается с входным сигналом, чтобы определить сигнал ошибки; этот сигнал ошибки затем используется вместе с входным сигналом, чтобы изменить набор значений коэффициентов отвода фильтра. Затем может быть использован обучающий алгоритм, чтобы обновить значения коэффициентов отвода фильтра на основе сигнала ошибки и входного сигнала; обучающий алгоритм выгоден тем, что он обеспечивает эффективный способ обновления значений коэффициентов отвода фильтра.
Предпочтительно способ содержит подачу в повышающий преобразователь и понижающий преобразователь сигнала местного гетеродина, сформированного источником сигнала местного гетеродина, при этом местный гетеродин используется во множестве рабочих состояний, содержащих:
первое рабочее состояние, в котором местный гетеродин вводит указанный сигнал местного гетеродина в повышающий преобразователь и в понижающий преобразователь; и
второе рабочее состояние, в котором местный гетеродин применяет фазовый сдвиг к сигналу, вводимому в повышающий преобразователь или в понижающий преобразователь,
когда местный гетеродин работает в первом рабочем состоянии;
определение, для каждого рабочего состояния, сигнала ошибки, сравнивая сигнал, преобразованный понижающим преобразованием, с входным сигналом;
определение для каждого рабочего состояния промежуточного набора значений коэффициентов отвода фильтра на основе сигнала ошибки и входного сигнала; и
обновление текущего набора значений коэффициентов отвода фильтра, чтобы получить обновленный набор значений на основе комбинации векторов промежуточных наборов значений с текущим набором значений.
В результате схемой коррекции можно управлять, чтобы исправить квадратурные ошибки в повышающем преобразователе даже при наличии квадратурных ошибок в понижающем преобразователе.
Полезно, чтобы понижающий преобразователь дополнительно находится в функциональном взаимодействии со схемой посткоррекции, используемой для исправления частотно-зависимой квадратурной ошибки, между синфазным и квадратурным трактами передачи в квадратурном понижающем преобразователе; при этом сигнал, преобразованный понижающим преобразованием, включает частотные компоненты, и схема посткоррекции включает набор коэффициентов отвода фильтра посткорректора и средства конфигурации для того, чтобы сконфигурировать значения указанного набора коэффициентов отвода фильтра посткорректора, при этом способ дополнительно содержит следующий стадии:
обновление текущих значений коэффициентов отвода фильтра посткорректора, чтобы получить обновленный набор коэффициентов посткорректора на основе комбинации векторов промежуточных наборов значений коэффициентов отвода фильтра с текущим набором коэффициентов посткорректора; и
использование обновленного набора значений посткорректора для управления схемой посткоррекции,
чтобы исправить указанную квадратурную ошибку в квадратурном понижающем преобразователе путем коррекции, применяемой к каждому указанному частотно-зависимому компоненту. Это обеспечивает средство управления частотно-зависимой схемы корректора для повышающего преобразователя и частотно-зависимой схемы корректора для понижающего преобразователя. Дополнительно, частотно-зависимая коррекция в понижающем преобразователе может использоваться в качестве ввода в контроллер предыскажений для усилителя мощности, улучшая, таким образом, работу контроллера предыскажений.
Вышеупомянутая функциональность может быть воплощена как программное обеспечение или как читаемый компьютером код на считываемом компьютером носителе для использования при управлении схемой коррекции повышающего преобразователя и понижающего преобразователя, как описано выше.
В соответствии со второй целью изобретения оно обеспечивает цепь передачи, содержащую:
тракт передачи, содержащий:
схему коррекции для исправления частотно-зависимой квадратурной ошибки между синфазным и квадратурным сигнальными трактами для передачи входного сигнала, причем схема коррекции содержит синфазный входной порт, квадратурный входной порт, синфазный выходной порт и квадратурный выходной порт, при этом каждый входной порт соединен с каждым выходным портом схемой цифрового фильтра, при этом схема цифрового фильтра имеет набор коэффициентов отвода фильтра и средство конфигурации для конфигурации значений этого набора коэффициентов отвода фильтра; и
квадратурный повышающий преобразователь для преобразования входного сигнала; и
тракт наблюдения, содержащий:
соединитель для приема части входного сигнала, преобразованного повышающим преобразованием; и
квадратурный понижающий преобразователь для преобразования сигнала, принятого соединителем;
цепь передачи дополнительно содержит контроллер, который:
определяет сигнал ошибки, сравнивая сигнал, преобразованный понижающим преобразованием с входным сигналом;
изменяет набор значений коэффициентов отвода фильтра на основе сигнала ошибки и входного сигнала; и
использует обновленный набор значений для управления схемой коррекции и исправления указанной квадратурной ошибки путем коррекции, применяемой к каждому указанному частотному компоненту, которая зависит от частоты указанного частотного компонента.
В соответствии с дополнительно целью настоящего изобретения, оно обеспечивает схема коррекции по пункту 1.
Более конкретно, в соответствии с одной целью изобретения обеспечивается схема коррекции для исправления частотно-зависимой квадратурной ошибки, между характеристикой передачи синфазного сигнального тракта и характеристикой передачи квадратурного сигнального тракта, при этом квадратурный сигнальный тракт используется для передачи синфазных и квадратурных частей сигнала, при этом схема коррекции содержит синфазный входной порт, квадратурный входной порт, синфазный выходной порт и квадратурный выходной порт,
при этом каждый входной порт соединен с каждым выходным портом схемой цифрового фильтра при этом схема цифрового фильтра включает набор коэффициентов отвода фильтра и средство конфигурации для конфигурации значений указанного набора коэффициентов отвода фильтра.
Преимущество соединения каждого входного порта с каждым выходным портом схемой цифрового фильтра, включая набор коэффициентов отвода фильтра и наличие средство конфигурации для конфигурации значений указанного набора коэффициентов отвода фильтра, заключается в том, что частотно-зависимые квадратурные ухудшения, например, вследствие аналоговых компонентов квадратурного повышающего преобразователя или понижающего преобразователя, могут быть исправлены соответствующим выбором коэффициентов.
В одном примере воплощения схема цифрового фильтра содержит:
первый цифровой фильтр, соединяющий синфазный входной порт с синфазным выходным портом;
второй цифровой фильтр, соединяющий синфазный входной порт с квадратурным выходным портом;
третий цифровой фильтр, соединяющий квадратурный входной порт с синфазным выходным портом; и
четвертый цифровой фильтр, соединяющий квадратурный входной порт с квадратурным выходным портом,
в котором каждый цифровой фильтр содержит соответствующий набор коэффициентов отвода фильтра и соответствующие средства конфигурации для конфигурации значений указанного набора коэффициентов отвода фильтра.
Каждый цифровой фильтр может быть реализован как фильтр с конечной импульсной характеристикой, который выгоден тем, что фильтром с конечной импульсной характеристикой можно управлять посредством соответственно выбранных коэффициентов, чтобы обеспечить хорошее приближение частотной характеристики квадратурные ухудшения.
Альтернативно, каждый цифровой фильтр может быть реализован как полиномиальная структура на основе ряда Вольтерры, который выгоден тем, что такой фильтр обеспечивает очень хорошую защиту против эффектов квадратурные ухудшения.
Краткое описание чертежей
Фиг.1 - принципиальная блок-схема, иллюстрирующая обычную схему коррекции квадратуры;
Фиг.2 - принципиальная блок-схема, иллюстрирующая частотно-зависимую предкоррекцию и частотно-зависимую посткоррекцию, управляемые сравнением сигнала, преобразованного понижающим преобразованием, с входным сигналом согласно одному примеру воплощения изобретения;
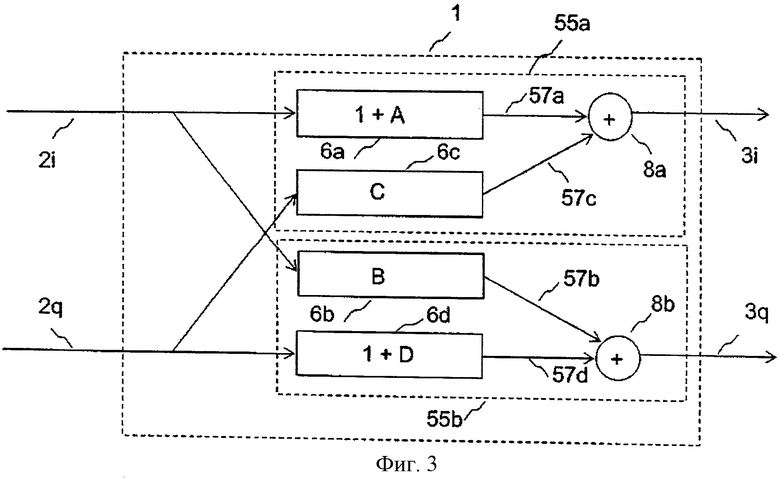
Фиг.3 - принципиальная блок-схема, иллюстрирующая частотно-зависимую схему коррекции согласно одному примеру воплощения изобретения;
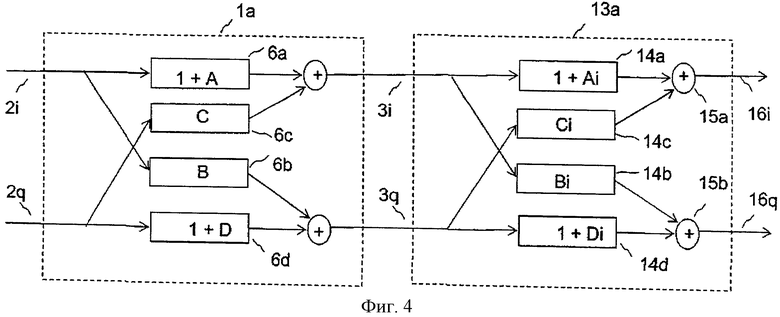
Фиг.4 - принципиальная блок-схема, иллюстрирующая частотно-зависимую схему коррекции согласно одному примеру воплощения изобретения, сопровождаемого типичными ухудшениями сетевых условий, как иллюстрация работы примера воплощения изобретения;
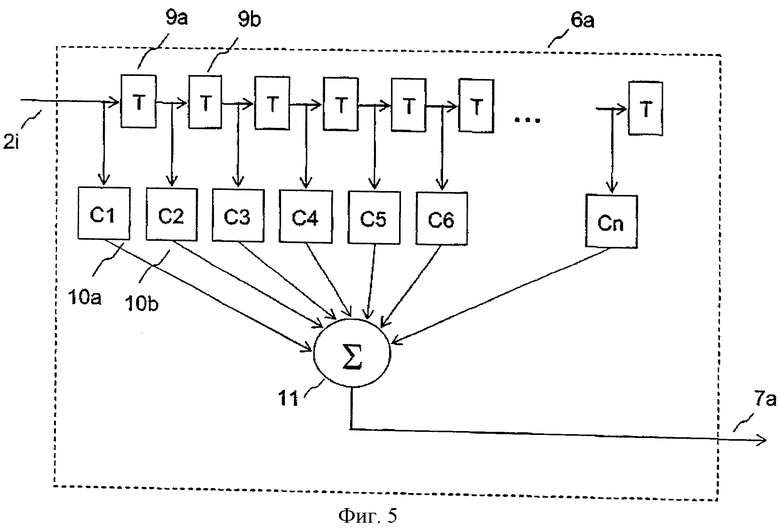
Фиг.5 - блок-схема, иллюстрирующая компонент цифрового фильтра частотно-зависимой схемы коррекции согласно одному примеру воплощения изобретения;
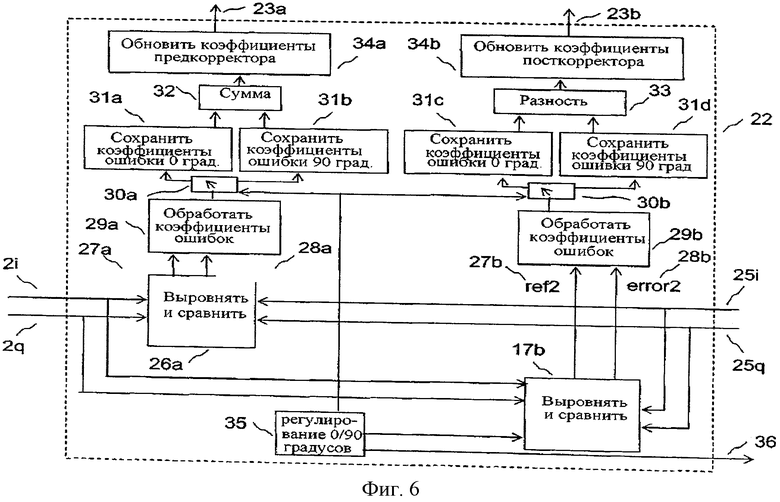
Фиг.6 - блок-схема, иллюстрирующая контроллер для частотно-зависимой схемы предкоррекции и частотно-зависимой схемы посткоррекции согласно одному примеру воплощения изобретения;
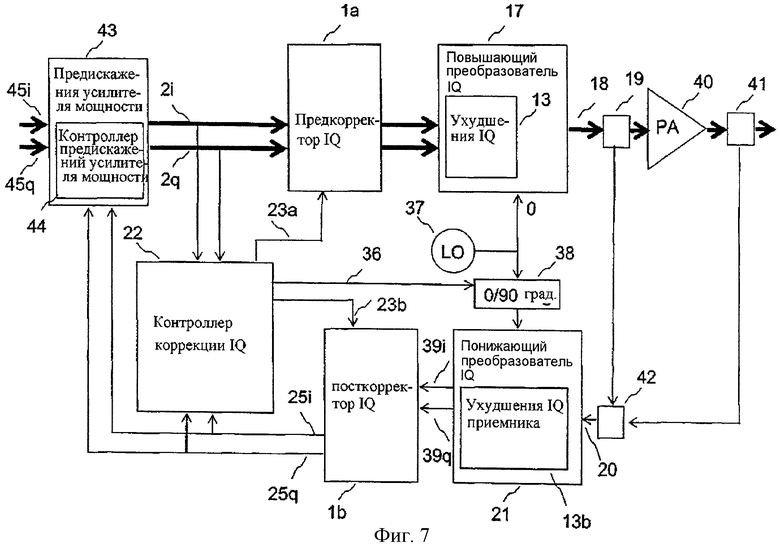
Фиг.7 - блок-схема, иллюстрирующая частотно-зависимую предкоррекцию и частотно-зависимую пост-коррекцию согласно одному примеру воплощения изобретения;
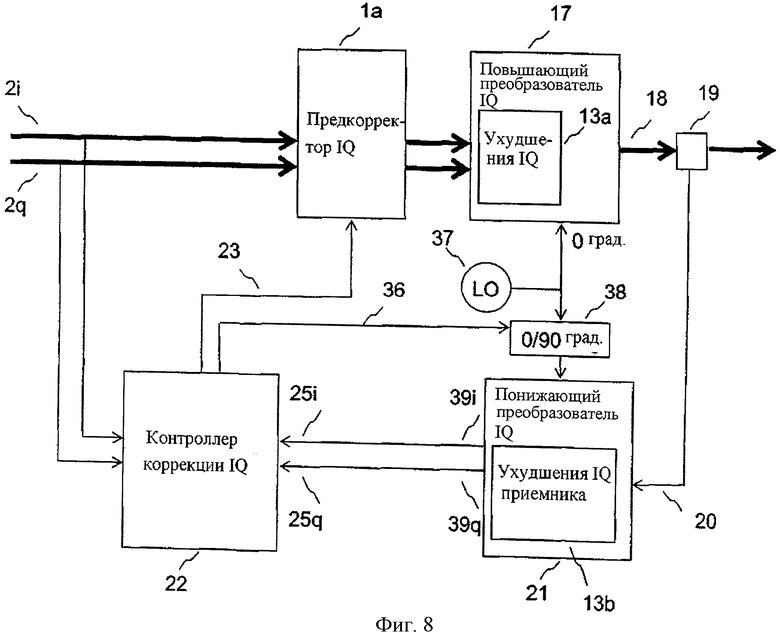
Фиг.8 - блок-схема, иллюстрирующая частотно-зависимую предкоррекцию согласно одному примеру воплощения изобретения;
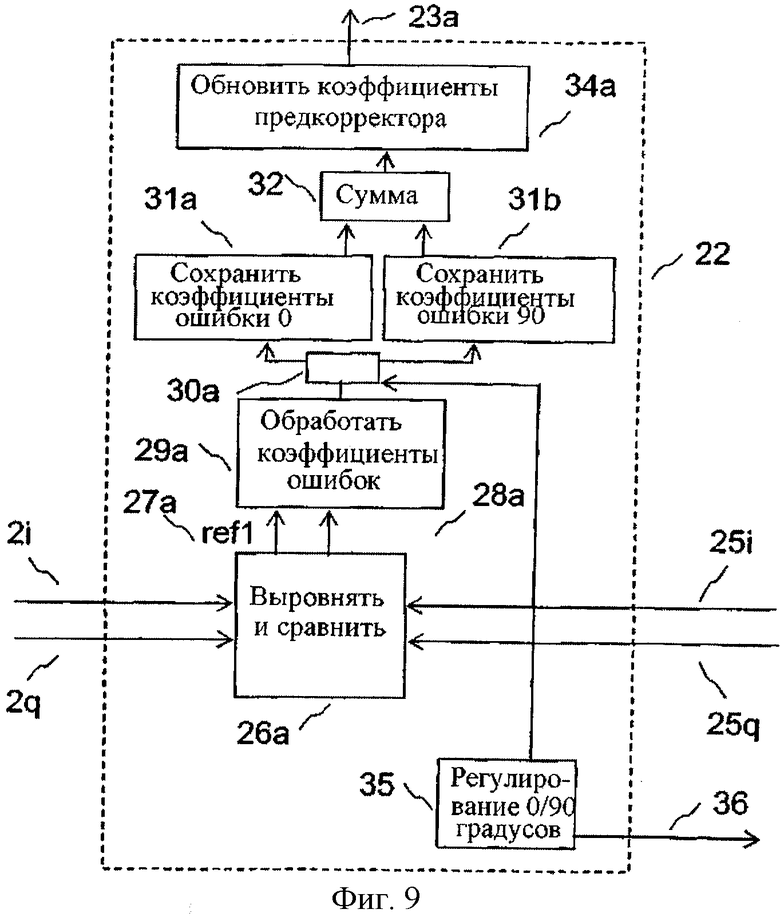
Фиг.9 - схема, иллюстрирующая детали контроллера для частотно-зависимой схемы предкоррекции согласно одному примеру воплощения изобретения;
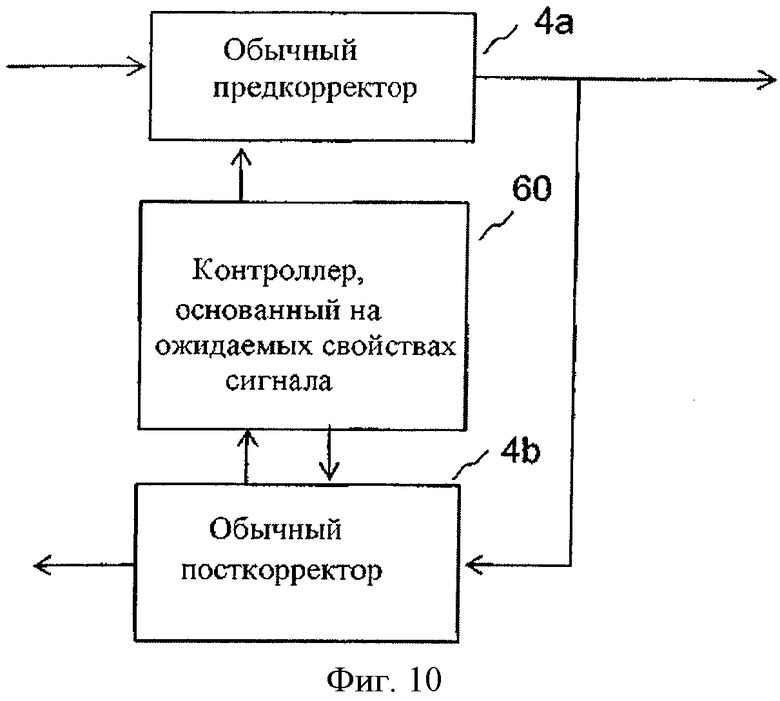
Фиг.10 - блок-схема, иллюстрирующая обычные схемы предкоррекции и посткоррекции, которые управляются путем оптимизации ожидаемых свойств сигнала, преобразованного понижающим преобразованием; и
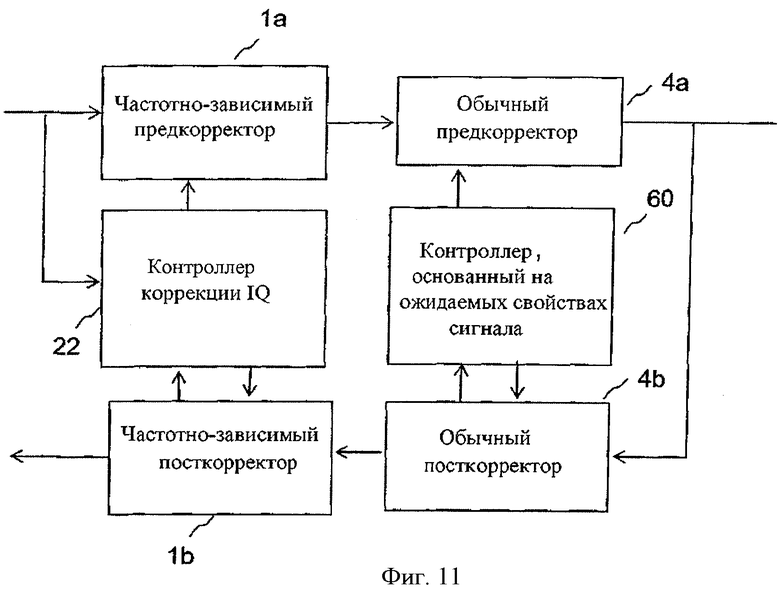
Фиг.11 - блок-схема, иллюстрирующая частотно-зависимую предкоррекцию и частотно-зависимую пост-коррекцию в соответствии с еще одним примером воплощения изобретения.
Подробное описание изобретения
В целом, настоящее изобретение относится к способам и устройствам для коррекции квадратурных ошибок в системах связи.
Изобретение далее описывается на примерах его воплощения в контексте схемы передачи беспроводной системы, т.е. набора компонентов в цепи передачи беспроводной системы, в которой цифровой сигнал преобразуется повышающим преобразованием в цепи передачи прямого преобразования, и в котором переданный импульсный сигнал преобразуется понижающим преобразованием в приемнике прямого преобразования для приема приемником наблюдения. Приемник наблюдения может использоваться для управления функцией предыскажений, применяемой к цифровому сигналу до повышающего преобразования, чтобы предварительно исправить нелинейный выход усилителя мощности. Однако следует понимать, что этот пример приведен только для иллюстрации, и изобретение не ограничено использованием в беспроводных системах или для систем, связанных с предварительным нелинейным искажением усилителя.
На фиг.2 представлен первый пример воплощения изобретения. Цифровой основополосный сигнал с синфазными компонентами 2i и квадратурными компонентами 2q вводится в предкорректор la и затем передается в преобразователь прямого повышающего преобразования IQ 17. Повышающий преобразователь IQ 17 содержит цифроаналоговые преобразователи для синфазных и квадратурных компонентов, и сформированные таким образом аналоговые сигналы передаются через фильтры нижних частот в квадратурный смеситель для повышающего преобразования. Аналоговые каналы неизбежно вносят квадратурные ошибки, также называемые ухудшениями IQ 13a, в частности, дифференциальные ошибкам между синфазными и квадратурными компонентами, которые изменяются как функция частоты в пределах основной полосы частот. Преобразованный сигнал 18 выводится через соединитель 19, обычно в усилитель мощности для усиления в подготовке к передаче сигналов через антенну. Предкорректор IQ la управляется контроллером коррекции IQ 22, конкретно с помощью управляющих сигналов 23 так, чтобы уменьшить влияние ухудшений IQ 13a.
Соединитель 19 снимает импульсный сигнал с выхода 18 повышающего преобразователя 17 и передает его на вход 20 преобразователя IQ 21 прямого понижающего преобразования, который можно назвать приемником наблюдения. Понижающий преобразователь IQ 21 содержит квадратурный смеситель, который в качестве аналоговых выходов имеет синфазные и квадратурные тракты, которые проходят через аналоговые сглаживающие фильтры к паре аналого-цифровых преобразователей (не показаны). Отдельные аналоговые тракты случайно вносят квадратурные ошибки, и, аналогично каналам передачи, эти ухудшения особенно нежелательны, когда есть дифференциальные ошибки между синфазными и квадратурными компонентами, которые изменяются как функция частоты в пределах основной полосы частот.
Цифровые синфазные и квадратурные компоненты сигналов 39i и 39q, которые выводятся понижающим преобразователем 21, передаются в посткорректор IQ lb, который управляется контроллером коррекции IQ 22 с помощью управляющих сигналов 23b, с тем чтобы уменьшить влияние ухудшений IQ 13b в приемном канале.
Контроллер коррекции IQ 22 сравнивает компоненты 2i и 2q входного сигнала с компонентами 25i и 25q сигнала, которые выводятся после посткорректора IQ lb, которые сформированы из сигналов, принятых приемным каналом, т.е. приемником наблюдения. Контроллер коррекции IQ 22 управляет предкорректором la и посткорректором с помощью сигналов 23a, 23b так, что ошибка между входными компонентами сигнала 2i, 2q и принятыми компонентами 25i, 25q сигнала сводится к минимуму. Кроме того, контроллер IQ или, возможно, другой контроллер (не показан), управляет относительной фазой между сигналом местного гетеродина, передаваемым в повышающий преобразователь IQ 17, и сигналом, вводимым в понижающий преобразователь IQ 21. В одной устройстве подходящие компоненты управления схематично показаны как части 37 и 38, функция которых будет описана ниже.
Как правило, относительная фаза между сигналом, создаваемым местным гетеродином 37 и повышающим преобразователем IQ 17, и сигналом, создаваемым местным гетеродином 37 и понижающим преобразователем IQ 21, изменяется между двумя состояниями, отличающимися на 90 градусов. Сравнение измерений, сделанных для каждого состояния, позволяет использовать предкорректор IQ la для коррекции ухудшений IQ в повышающем преобразователе 17, и использовать посткорректор IQ для коррекции ухудшений IQ в понижающем преобразователе 21. Как правило, сигналы с выхода местного гетеродина 37 разделяются, и одна часть подается в повышающий преобразователь без сдвига фазы, и другая часть - со сдвигом фазы номинально на 0 или 90 градусов поочередно, и эта часть подается в понижающий преобразователь. Нет необходимости сдвигать фазу точно на 90 градусов, поскольку, в принципе, любая разность фаз должна позволить системе выполнять коррекцию, необходимую для предкорректора. Предпочтительно, не следует изменять сдвиг фазы сигнала, подаваемого в повышающий преобразователь, поскольку этот сдвиг фазы был бы наложен на переданный сигнал как нежелательная фазовая модуляция. Следует отметить, что переменный сдвиг фазы альтернативно может быть наложен на линию от соединителя 19 до входа понижающего преобразователя IQ 21. Однако это потребует, чтобы фазовращатель имел бы более широкую полосу, чем полоса IF частоты, если фазовращатель размещен в канале местного гетеродина, поскольку сигнал, связанный соединителем 19, может модулироваться, тогда как сигнал местного гетеродина обычно не модулируется.
На фиг.3 представлена структура частотно-зависимой схемы коррекции квадратурных ошибок согласно изобретению, которая может использоваться либо для схемы предкоррекции la, либо для схемы посткоррекции lb. Синфазные цифровые компоненты вводятся в точке 2i, и квадратурные цифровые компоненты вводятся в точке 2q. Синфазные компоненты разделяются на два тракта; один тракт проходит через цифровой фильтр 6a к блоку объединения 8a и от него к синфазному выходу 3i. Другой тракт проходит через цифровой фильтр 6b к блоку объединения 8b и от него в квадратурный выход 3q. Характеристика передачи цифрового фильтра 6а может быть представлена как 1+A, чтобы указать, что сигналы проходят, в основном, без изменения, за исключением небольшой величины A, которая может зависеть от частоты. Для фильтра 6b характеристика передачи может быть представлена как B, чтобы указать, что сигнал ослаблен на величину B, которая может зависеть от частоты. Как правило, и A и B намного меньше единицы, предпочтительно меньше чем 0,1.
По отношению к синфазным компонентам квадратурные компоненты разделяются на два тракта; один тракт проходит через цифровой фильтр 6d к блоку объединения 8b и от него поступает в квадратурный выход 3q. Другой тракт проходит через цифровой фильтр 6c к блоку объединения 8a и от него проходит к синфазному компоненту выхода 3i. Характеристика передачи цифрового фильтра 6d может быть представлена как 1+D, чтобы указать, что сигналы проходят, в основном, без изменения, за исключением небольшой величины D, которая может зависеть от частоты. Для фильтра 6c характеристика передачи может быть представлена как C, чтобы указать, что сигнал ослаблен на величину C, которая может зависеть от частоты. Как правило, C и D намного меньше единицы, и предпочтительно меньше чем 0,1.
На фиг.4 показана схема коррекции, в данном случае используемая в качестве схемы предкоррекции la, исправляющая ухудшения 13. Можно отметить, что ухудшения смоделированы как схема с топологией, аналогичной схеме la коррекции. Синфазные компоненты 2i проходят через фильтр 6а, умножаются на коэффициент пропускания 1+A и затем проходят через характеристику ухудшения 14a, умноженную на коэффициент пропускания 1+Ai. Здесь термин Ai используется для указания того, что Ai - коэффициент ухудшения условий, а не синфазный или воображаемый коэффициент. Очевидно, что будут сформированы квадратичные формы, но для небольших A, B, C и D, квадратичные формы пренебрежимо малы.
При изучении фиг.4 и просмотре ухудшений условий, можно видеть, что синфазный компонент сигнала 3i, входящий в схему, моделирующую ухудшения IQ 13, умножается на коэффициент (1+Ai) и поступает на выход схемы, моделирующей ухудшения IQ 13 в выходном порту 16i. Можно видеть, что компонент квадратурного сигнального компонента 3q умножен на Ci в схеме, моделирующей ухудшения IQ 13, и добавлен в дополнительном блоке 15a к синфазному компоненту, который был умножен на коэффициент (1+Ai), чтобы появиться в синфазном выходе 16i.
Для исправления этих ухудшений в первом приближении обеспечивается схема корректора la. Синфазный компонент 2i умножается на коэффициент (1+A), и квадратурный компонент 2q умножается на коэффициент C, добавляется к умноженному синфазному компоненту и передается на вход 3i схемы, моделирующей ухудшения IQ 13.
Для небольших коэффициентов A и Ai можно показать, что коэффициент ухудшения Ai может быть значительно ослаблен, когда А=-Ai. На фиг.4 можно заметить, что возникают квадратичные формы, например в двух каскадных синфазных каналах прохождения сигнала через блоки 6a и 14a, коэффициент пропускания будет (1+A)(1-A)=1-A2.
Точно так же, для небольших C и Ci, паразитный квадратурный компонент, проходящий через блок 14c с коэффициентом пропускания Ci, существенно ослабляется компонентом 2q, проходящим через блок 6c схемы коррекции la с коэффициентом пропускания C, когда C=-Ci.
Если A, B, C и D меньше чем 0,1, то квадратичные формы составят менее 1% в единицах напряжения, т.е. 40 dB в единицах мощности.
Точно так же, синфазный компонент, проходящий через B, существенно ослабляет паразитные компоненты Bi, если B=-Bi и B является небольшим, т.е. намного меньше единицы. Также очевидно что, если D=-Di ухудшения в блоке 14d могут также быть исправлены, когда D и C являются небольшими.
Следует понимать то, что подобный принцип применим и к схеме посткорректора, которая исправляет ухудшение условий.
Как было отмечено выше, коррекция дифференциальных ошибок в характеристике передачи между синфазным (I) и квадратурым (Q) каналами имеет особое значение. Таким образом, снятие условий ухудшения, которые вызывают дифференциальные ошибки, имеет практическое значение, и это может быть приемлемо для объединения ухудшения и коррекции, чтобы получить характеристику передачи, которая, хотя не то же самое, что характеристика передачи без ухудшения, однако является той же самой на каналах I и Q. Иными словами, в случае, показанном на фиг.4, желательный результат не обязательно является ситуацией, в которой каналы I и Q каждый имеет характеристику передачи 1. Также может быть приемлемым результат, когда каналы I и Q имеют некоторую другую характеристику передачи, при условии, что характеристика на каждом из них одна и та же. Работа контура управления автоматически сформирует оптимальные характеристики передачи для фильтров в схемы коррекции; следует понимать, что оптимальным решением не обязательно будет применение коррекции, которая просто возвращает характеристики передачи в состояние, которое существовало бы при отсутствии условий квадратурные ухудшения. Действительно, работа контура управления может потенциально улучшить работу системы помимо простого удаления дифференциальных ошибок между синфазными и квадратурными каналами, если коэффициент, который оптимизирован контуром управления, изменен способом улучшения условий передачи. Например, при помощи контура управления может быть достигнуто выравнивание усиления и синфазных и квадратурных каналов.
На фиг.5 представлены компоненты 6a, 6b, 6c или 6d типичного цифрового фильтра показанного на фиг.4. Компоненты цифрового сигнала 2i передаются в линию задержки с отводами, содержащую набор элементов задержки 9a, 9b, каждый из которых задерживает компоненты сигнала p на время T; это время задержки T может быть периодом дискретизации цифровых сигналов. После каждого элемента задержки часть сигнала отводится и умножается на коэффициент фильтра или вес Cn. Взвешенные компоненты затем суммируются в компоненте 11 сложения и передаются на выход 7a. Коэффициенты фильтра показаны как коэффициенты C1, C2 … Cn. Эта структура составляет обычный фильтр с конечной импульсной характеристикой (КИХ, FIR). Коэффициенты могут быть линейными коэффициентами и управляемыми контроллером коррекции 22, чтобы наилучшим образом снять ухудшения условий путем согласования частотной характеристики соответствующего компонента ухудшения. Также допустимо, чтобы каждый отвод, в дополнение к линейным коэффициентам, имел бы регулируемые коэффициенты, которые работают на квадратах, кубичных или других нелинейных функциях отведенного сигнала. Такая структура может называться представлением ряда Вольтерры.
На фиг.6 представлен контроллер коррекции IQ 22 в более подробном виде. Компоненты синфазного 2i и квадратурного 2q ввода, которые введены в контроллер, сравниваются с синфазным 25i и квадратурным 25q компонентами от приемника наблюдения, как уже было упомянуто выше. Чтобы исправить дисбаланс сдвигов фаз и амплитуды, происходящий при практической реализации системы, необходимо выровнять компоненты сигналов от ввода относительно сигналов приемника наблюдения перед выполнением сравнения, чтобы сформировать сигнал ошибки. Причина состоит в том, что сигнал ошибки должен представить эффект вклада ухудшений IQ, а не воздействие других элементов схемы. Для изменения коэффициентов предкорректора, выравнивания и сравнения блок 26а используется для выравнивания принятых сигналов 25i, 25q по фазе с компонентами 2i, 2q входного сигнала. Для управления коэффициентами посткорректора, выравнивания и сравнивания, блок 17b используется для выравнивания входного сигнала 2i, 2q по фазе с принятыми компонентами сигнала 25i, 25q.
Сначала рассмотрим работу контроллера 22, при которой для обновления коэффициентов ошибок предкорректора, блок выравнивания и сравнения 26a формирует опорный выход 27a, который представляет входной компонент сигнала, и выход ошибки 28a, который представляет различие между выровненным сигналом от приемника наблюдения и компонентом входного сигнала. Опорный сигнал 1 и сигнал ошибки 1 передаются в функциональный блок набора коэффициентов ошибок 29a. Этот блок поддерживает модель схемы корректора с точки зрения топологии, и обработка включает корректировку коэффициентов ошибок так, что когда применено к опорному сигналу, модель схемы корректора выдает сигнал ошибки. Это может быть сделано с помощью обычных методик. Подходящая методика включает одновременное решение ряда уравнений, относящихся к вводу сигнала ошибки, чтобы получить набор коэффициентов. Как правило, это будет повторяться много раз, и будет применен метод наименьших квадратов, чтобы получить оптимальное значение из множества измерений. Подобный процесс используется для тренинга коэффициентов ошибок для посткорректора, используя функциональный блок тренинга коэффициентов ошибок 29b.
Как было отмечено выше, процесс тренинга не может найти различие между коэффициентами, требуемыми для предкорректора и для посткорректора; чтобы устранить эту неоднозначность, процесс может быть разбит на два этапа: сначала с использованием сигнала местного гетеродина для повышающего преобразователя и понижающего преобразователя в первом относительном фазовом состоянии, и затем с использованием сигнала местного гетеродина во втором относительном фазовом состоянии, обычно отличающимся на 90 градусов от первого относительного фазового состояния.
Рассмотрим сначала управление коэффициентами предкорректора. Переключатель 30a, действующий на выходе функционального блока тренинга коэффициентов ошибок 29b, направляет коэффициенты ошибок для хранения фазового состояния 0 местного гетеродина в хранилище 31a, и направляет коэффициенты ошибок, вычисленные в фазе 90 местного гетеродина (т.е. отличающихся на 90 градусов от фазового состояния 0), в отдельное хранилище 31b. Сумма двух хранилищ для хранения коэффициентов ошибок, обозначенных на схеме позицией 32, затем используется в качестве обновления, которое будет добавлено к коэффициентам предкорректора. Коэффициенты предкорректора многократно обновляются, добавляя сумму сохраненных коэффициентов ошибок 32, найденных в двух состояниях местного гетеродина для существенной коррекции ухудшения IQ.
Коэффициенты посткорректора обновляются подобным образом через части 31c, 31d и 33, но с учетом разницы между сохраненными коэффициентами ошибок для двух состояний местного гетеродина, а не их суммы. Если сдвиг фазы введен в процесс выравнивания только в одном фазовом соотношении местного гетеродина, то соответствующий сдвиг фазы должен быть применен к сохраненным коэффициентам ошибок перед операциями суммирования или разницы, чтобы компенсировать сдвиг фазы. Процесс сдвига фазы и суммирования, так же как процесс сдвига фазы и вычисления разницы, можно назвать комбинациями векторов.
На фиг.7 показана система по фиг.6, примененная к цепи передачи, используя предыскажения для коррекции нелинейности в усилителе мощности 40.
Особенно выгодно использовать примеры воплощения настоящего изобретения в комбинации с системой для линеаризации характеристики усилителя мощности путем предыскажения. Устройства беспроводной связи, такие как базовые станции и терминалы, имеют цепь передачи, который включает усилитель мощности, чтобы усилить модулируемый сигнал для последующей передачи по беспроводному каналу. Известно, что элементы в цепи передачи могут внести искажение в передаваемый сигнал, и поэтому были сделаны различные предложения по компенсации этого искажения. Одно такое предложение состоит в создании архитектуры предыскажений, где маломощный модулированный сигнал предварительно искажается способом, который компенсирует нелинейные эффекты усилителя мощности прежде, чем сигнал будет подан на вход усилителя мощности. Предварительное искажение применялось к входному сигналу, и (неизбежное) нелинейное искажение применялось к входному сигналу усилителем мощности, в результате получая выходной сигнале, в основном, без искажений.
Как правило, в адаптивной архитектуре предыскажений используется предыскажение в цифровом пространстве перед повышающим преобразованием. Предварительно искаженные сигналы для синфазных и квадратурных каналов в цифровой форме создаются в основной полосе частот, отдельно преобразуются в аналоговые и затем подвергаются прямому преобразованию, применяя их к синфазным и квадратурным отводам прямого повышающего преобразователя, также упоминаемый здесь как повышающий преобразователь IQ. Часть преобразованного выходного сигнала возвращается к функции сравнения для управления системой предыскажений. Этот тракт обратной связи известен как приемник наблюдения, и может либо преобразовать выбранную часть выходного сигнала до более низкой промежуточной частоты (IF), либо преобразовать выбранную часть преобразованного выходного сигнала, преобразованного понижающим преобразованием, непосредственно в основополосный сигнал.
Как было упомянуто выше, прямое преобразование может быть выгодным с точки зрения экономичной реализации, но может пострадать от эффекта дифференциальных ошибок в синфазных и квадратурных трактах прохождения сигнала. Прямое преобразование имеет определенное преимущество, состоящее в том, что местный гетеродин управляет понижающим преобразованием и повышающим преобразованием на одной и той же частоте и, таким образом, может использовать один и тот же синтезатор без риска генерации паразитных частот, имеющего место, если архитектура прямого преобразования используется для повышающего преобразователя с архитектурой промежуточной частоты, используемой для понижающего преобразователя.
Однако неизбежные квадратурные ошибки ограничивают использование и эффективность архитектуры прямого преобразования в каналах приемника наблюдения. Известны способы коррекции, не зависящие от частоты, которые устраняют недостатки повышающего преобразователя и включают использование обычного корректора квадратурных ошибок, показанного на фиг.1; однако они не включают коррекцию дополнительных квадратурных ухудшений для устранения указанных недостатков. Если в приемнике наблюдения используется архитектура прямого преобразования, то квадратурные ошибки будут внесены в приемник наблюдения. Даже если будут скомпенсированы квадратурные ошибки в повышающем преобразователе, ошибки в понижающем преобразователе искажают сигнал наблюдения, используемый для управления предыскажениями усилителя мощности, и ограничивают эффективность контура коррекции усилителя предыскажений. Соответственно, необходимо исправить ошибки, внесенные повышающим преобразователем и понижающим преобразователем. Система, показанная на фиг.8, разработана, чтобы достичь этой цели.
На фиг.8 можно видеть, что контроллер 44 усилителя мощности предыскажений принимает компоненты входного сигнала 45i, 45q и также откорректированные компоненты 25i, 25q сигнала из приемника наблюдения, соединенного с посткорректором IQ lb. Контроллер усилителя мощности предыскажений 44 использует эти входные компоненты, чтобы сформировать характеристику предыскажений, применимую к входному сигналу в блоке предыскажений PA 43, чтобы сформировать входные компоненты 2i, 2q для стадии la предкорректора IQ. Предварительно исправленный компонент сигнала затем вводится в повышающий преобразователь IQ 17, и преобразованный компонент сигнала проходит через соединитель 19 к усилителю мощности 40 и затем проходит через второй соединитель 41 для передачи. Переключатель 42 направляет компоненты сигнала в понижающий преобразователь IQ 21 от соединителя 19, который расположен на выходе усилителя мощности (PA) 40, при работе контроллера коррекции IQ, и направляет компоненты сигналов от соединителя 41 к понижающему преобразователю 21, когда работает контроллер предыскажений РА 44. Это происходит потому, что контроллер РА 44 работает с целью минимизировать разницу между входом в цепь передачи 45i, 45q (ввод в блоку предыскажений РА 43) и выходом усилителя мощности (как измерено на выходе 25i, 25q посткорректора IQ при соответствующей установке переключателя 42), тогда как контроллер коррекции IQ 22 работает с целью минимизировать разницу между вводом 2i, 2q в предкорректор IQ la и выходом повышающего преобразователя IQ 17 (также как измерено на выходе 25i, 25q посткорректора IQ с соответствующей установкой переключателя 42).
На фиг.8 показано, что система по фиг.2 может работать, не применяя посткоррекцию, т.е. не вычисляя или применяя коэффициенты к посткорректору 1h. Фиг.9 иллюстрирует контроллер коррекции IQ 22, управляющий только предкорректором IQ la. Было найдено, что коэффициенты предкоррекции предкорректора IQ la могут быть натренированы на отмену ухудшения IQ 13a в повышающем преобразователе, даже если посткорректор отсутствует. В основном, это выгодно, но не необходимо для применения посткорректора, чтобы ускорить сходимость контура управления коррекцией IQ. Это также удобно для корректировки выход понижающего преобразователя IQ, когда он используется с контуром управления предыскажений усилителя мощности, чтобы оптимизировать производительность контура.
На фиг.10 представлена блок-схема системы, в которой обычные схемы предкоррекции 4a и посткоррекции 4b управляются контроллером 60 на основе оптимизации ожидаемых свойств сигнала, преобразованного понижающим преобразованием, как раскрыто в патентной заявке США 11/962432, находящейся на рассмотрении. Эта заявка направлена на коррекцию квадратурных ошибок, не зависящих от частоты, в системе с прямым повышающим преобразователем и приемником наблюдения, используя архитектуру прямого понижающего преобразования. Раскрыта методика, которая может отличить квадратурные ошибки в повышающем преобразователе от ошибок в понижающем преобразователе, при помощи измерений, сделанных в местных гетеродинах этих преобразователей в первом фазовом соотношении, и последующих дополнительных измерений в местных гетеродинах повышающего преобразователя и понижающего преобразователя во втором фазовом соотношении, обычно отличающимся от первого фазового соотношения углом 90 градусов. Измерения относятся к свойствам сигналов, принятых в приемнике наблюдения, которые сравниваются с ожидаемыми свойствами сигнала. Например, долгосрочная корреляция между синфазными и квадратурными компонентами ожидается равной нулю для идеального сигнала типа сигнала напряжения постоянного тока. Квадратурные ошибки в каналах повышающего преобразователя и понижающего преобразователя затем корректируются отдельно, используя схемы коррекции, коррекция в которых номинально одна и та же независимо от частоты в пределах основной полосы частот. Такие коррекции обычно включают коррекцию смещения напряжения, т.е. смещения DC, дифференциальных характеристик усиления между синфазным и квадратурным сигнальными трактами, и коррекцию фазовой ошибки между синфазным и квадратурным сигнальными трактами. Может использоваться обычная схема коррекции 4 квадратурных ошибок, например, показанная на фиг.1.
Однако могут иметь место ошибки и, в частности, дифференциальные ошибки, как при повышающем преобразовании, так и при понижающем преобразовании, которые зависят от частоты в пределах основной полосы частот. Например, такие ошибки могут быть внесены при аналоговой фильтрации, особенно в сглаживающих фильтрах, вследствие изменения значений аналоговых компонентов в пределах допуска и в связи с температурой. Обычные схемы коррекции, например, показанные на фиг.1, не могут исправить такие ошибки.
Кроме того, измерения на основе долгосрочных усреднений ожидаемых свойств принятых сигналов являются по существу медленными и, возможно, не обеспечивают достаточное усиление и стабильность измерительного контура для исправления квадратурных ошибок с высокой степенью точности.
Обычная система по фиг.10 может использоваться в сочетании с описанными выше примерами воплощения настоящего изобретения, в частности, показанными на фиг.6 и 7, для исправления частотно-зависимых квадратурных ошибок, как показано на фиг.11. На фиг.11 показано, что частотно-зависимые 1а и обычные 4а схемы предкоррекции могут быть расположены каскадом, также как и частотно-зависимые схемы посткоррекции 1h и обычные схемы посткоррекции 4b. Может оказаться выгодным удалить грубые ошибки, используя обычную схему коррекции квадратурных сигналов, такую как схема на фиг.1, чтобы улучшить работу частотно-зависимого предкорректора. Обычную схему предкоррекции можно регулировать, чтобы оптимизировать ожидаемые свойства сигнала, преобразованного понижающим преобразованием, как уже было описано со ссылкой на фиг.10. В частности, выгодно, исправить смещения DC этим способом, поскольку обычная квадратурная схема коррекции хорошо подходит для этой функции, и контур управления, основанный на ожидаемых свойствах наблюдаемого сигнала, особенно эффективен для управления обычной схемой коррекции IQ.
Специалистам очевидно, что в дополнение к беспроводным системам примеры воплощения настоящего изобретения могут быть применены и в проводных системах, таких как кабельное телевидение.
Вышеупомянутые примеры воплощения должны пониматься как иллюстративные примеры изобретения. Следует понимать, что любая функция, описанная в связи с любым примером воплощения, может быть использована как одна функция или в комбинации с другими описанными здесь признаками и также может использоваться в комбинации с одним или несколькими признаками из любых других примеров воплощения или любой комбинации из любых других примеров воплощения. Кроме того, не описанные выше эквиваленты и модификации могут также использоваться, не отходя от объема изобретения, который определен приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕДЫСКАЖЕНИЕ IQ-МОДУЛЯТОРА | 2005 |
|
RU2380848C2 |
| УСТРОЙСТВО И СПОСОБ ПРЕДЫСКАЖЕНИЯ И АВТОКАЛИБРОВКИ УСИЛИТЕЛЯ | 2005 |
|
RU2336628C2 |
| ДВУХРЕЖИМНАЯ СИСТЕМА СВЯЗИ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ И С МНОЖЕСТВЕННЫМ ДОСТУПОМ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1995 |
|
RU2142205C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ И СПОСОБ ОБРАБОТКИ СИГНАЛОВ | 2010 |
|
RU2510128C1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ И ИСКЛЮЧЕНИЯ СМЕЩЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ В ПРИЕМНИКЕ С КВАДРАТУРНОЙ ДЕМОДУЛЯЦИЕЙ | 1995 |
|
RU2156538C2 |
| Радиопередающее устройство с цифровой коррекцией нелинейности | 2019 |
|
RU2731135C1 |
| СХЕМА ПОДАВЛЕНИЯ ШУМОВ И КВАДРАТУРНЫЙ ПОНИЖАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ | 1999 |
|
RU2233023C2 |
| ДЕКОДЕР ЦИФРОВОГО ТЕЛЕВИЗИОННОГО СИГНАЛА С НЕСКОЛЬКИМИ НЕСУЩИМИ | 1994 |
|
RU2125346C1 |
| СПОСОБ ОЦЕНКИ СИНФАЗНОЙ И КВАДРАТУРНОЙ РАЗБАЛАНСИРОВКИ И АППАРАТУРА СВЯЗИ | 2020 |
|
RU2824185C1 |
| УСТРОЙСТВО И СПОСОБ ПРЕДЫСКАЖЕНИЯ ЦИФРОВОГО СИГНАЛА ОСНОВНОЙ ПОЛОСЫ ЧАСТОТ | 2006 |
|
RU2370889C2 |
Изобретение относится к области коррекции квадратурных ошибок, связанных с системами цифровой связи, и может использоваться в системах цифровой связи. Достигаемый технический результат - исправление фазовых ошибок между синфазным и квадратурным трактами. Заявлены цепь передачи, способ для управления ею, контроллер, устройство беспроводной связи, схема коррекции.
Канал передачи содержит цепь коррекции, которая имеет синфазный входной порт, квадратурный входной порт, синфазный выходной порт и квадратурный выходной порт, и каждый входной порт соединен с каждым выходным портом цепью цифрового фильтра, при этом цепь цифрового фильтра включает ряд весовых коэффициентов ответвления фильтра и средство конфигурации для конфигурации величин указанного ряда весовых коэффициентов ответвления фильтра. Входные сигналы преобразуются и часть их передается в квадратурный преобразователь с понижением частоты, контроллер, сравнивая сигнал, преобразованный с понижением частоты, с входным сигналом, изменяет набор величин весовых коэффициентов ответвления фильтра на основе сигнала ошибки, чтобы исправить частотно-зависимую квадратурную ошибку. 6 н. и 6 з.п. ф-лы, 11 ил.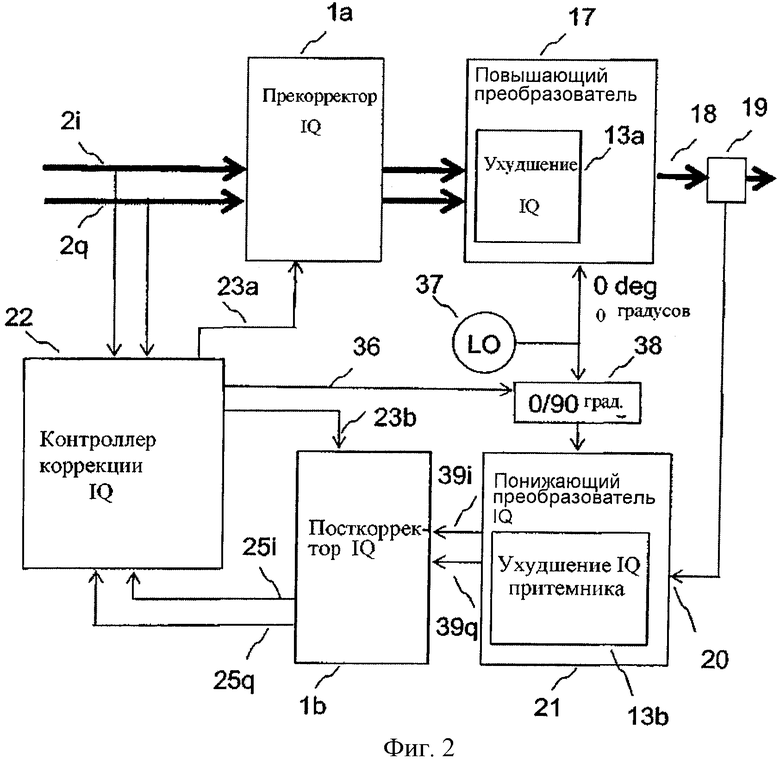
1. Способ управления цепью передачи, содержащий этапы, на которых:
связывают входной сигнал с входом квадратурного повышающего преобразователя, содержащегося в цепи передачи;
связывают выходной сигнал с выхода квадратурного повышающего преобразователя с квадратурным понижающим преобразователем, содержащимся в цепи передачи;
используют понижающий преобразователь для понижающего преобразования связанного с ним сигнала;
сравнивают сигнал, преобразованный понижающим преобразованием, с входным сигналом; и
изменяют значения коэффициентов отвода фильтра схемы коррекции, содержащейся в цепи передачи, в соответствии с упомянутым сравнением, чтобы уменьшить разность между характеристикой передачи синфазного сигнального тракта и характеристикой передачи квадратурного сигнального тракта, содержащихся в цепи передачи.
2. Способ по п.1, содержащий этап, на котором определяют сигнал ошибки из сигнала, преобразованного понижающим преобразованием, и входного сигнала, при этом при упомянутом изменении значений коэффициентов отвода фильтра используют сигнал ошибки и входной сигнал для изменения значений коэффициентов отвода фильтра.
3. Способ по п.1, дополнительно содержащий этапы, на которых:
подают на повышающий преобразователь и понижающий преобразователь сигнал местного гетеродина, сформированный источником сигнала местного гетеродина, при этом местный гетеродин имеет множество рабочих состояний, включающих в себя:
первое рабочее состояние, в котором местный гетеродин сконфигурирован вводить сигнал местного гетеродина в повышающий преобразователь и в понижающий преобразователь, и
второе рабочее состояние, в котором местный гетеродин сконфигурирован:
применять сдвиг фазы к сигналу местного гетеродина,
вводить сигнал местного гетеродина в один из повышающего преобразователя и понижающего преобразователя,
вводить сигнал местного гетеродина, к которому применен сдвиг фазы, в другой из повышающего преобразователя и понижающего преобразователя,
определяют для каждого рабочего состояния сигнал ошибки, при этом сравнивают сигнал, к которому применено понижающее преобразование, с входным сигналом;
определяют для каждого рабочего состояния промежуточные значения коэффициентов отвода фильтра в соответствии с сигналом ошибки и входным сигналом; и
обновляют текущие значения коэффициентов отвода фильтра, чтобы получить обновленные значения коэффициентов отвода фильтра в соответствии с комбинацией векторов промежуточных значений коэффициентов отвода фильтра и текущих значений коэффициентов отвода фильтра.
4. Способ по п.3, в котором понижающий преобразователь находится в функциональном взаимодействии со схемой посткоррекции, которая содержит коэффициенты отвода фильтра посткорректора и выполнена с возможностью исправления дифференциальной ошибки между синфазным трактом передачи и квадратурным трактом передачи в квадратурном понижающем преобразователе, причем сигнал, преобразованный понижающим преобразованием, содержит частотные компоненты в основной полосе частот, при этом способ дополнительно содержит этапы, на которых:
обновляют текущие значения коэффициентов отвода фильтра посткорректора, чтобы получить обновленные значения коэффициентов отвода фильтра посткорректора в соответствии с комбинацией векторов промежуточных значений коэффициентов отвода фильтра и текущих значений коэффициентов отвода фильтра посткорректора; и
используют обновленный набор значений коэффициентов отвода фильтра посткорректора для управления схемой посткоррекции, при этом исправляют дифференциальную ошибку в квадратурном понижающем преобразователе, при этом применяют коррекцию к каждому частотному компоненту, которая зависит от частоты этого частотного компонента в основной полосе частот.
5. Контроллер, предназначенный для выполнения способа по п.1.
6. Цепь передачи, содержащая:
тракт передачи, содержащий:
схему коррекции, содержащую:
синфазный входной порт, квадратурный входной порт, синфазный выходной порт и квадратурный выходной порт, причем каждый входной порт соединен с каждым выходным портом схемой цифрового фильтра, при этом схема цифрового фильтра содержит набор коэффициентов отвода фильтра и средство конфигурации для конфигурации значений данного набора коэффициентов отвода фильтра, и
квадратурный повышающий преобразователь для повышающего преобразования входного сигнала;
тракт наблюдения, содержащий:
соединитель, выполненный с возможностью приема части входного сигнала, преобразованного повышающим преобразованием, и
квадратурный понижающий преобразователь, выполненный с возможностью понижающего преобразования части сигнала, преобразованного повышающим преобразованием, которая принята соединителем; и
контроллер, выполненный с возможностью:
определять сигнал ошибки путем сравнения сигнала, преобразованного понижающим преобразованием, с входным сигналом,
изменять значения упомянутого набора коэффициентов отвода фильтра в соответствии с сигналом ошибки и входным сигналом и
исправлять частотно-зависимую квадратурную ошибку путем применения коррекции к по меньшей мере одному из частотных компонентов путем управления схемой коррекции с использованием упомянутого обновленного набора значений, причем данная коррекция зависит от частоты упомянутого по меньшей мере одного из частотных компонентов.
7. Устройство беспроводной связи, содержащее цепь передачи по п.6, причем устройство беспроводной связи представляет собой беспроводной терминал.
8. Устройство беспроводной связи, содержащее цепь передачи по п.6, причем устройство беспроводной связи представляет собой беспроводную базовую станцию.
9. Схема коррекции, содержащая:
синфазный входной порт, выполненный с возможностью приема синфазной части сигнала;
квадратурный входной порт, выполненный с возможностью приема квадратурной части сигнала;
синфазный выходной порт, выполненный с возможностью выдачи синфазной части исправленного варианта сигнала; и
квадратурный выходной порт, выполненный с возможностью выдачи квадратурной части исправленного варианта сигнала;
схему цифрового фильтра, содержащую:
первый цифровой фильтр, соединяющий синфазный входной порт с синфазным выходным портом,
второй цифровой фильтр, соединяющий синфазный входной порт с квадратурным выходным портом и выполненный с возможностью ослабления синфазной части сигнала на первую величину, зависящую от частоты,
третий цифровой фильтр, соединяющий квадратурный входной порт с синфазным выходным портом и выполненный с возможностью ослабления квадратурной части сигнала на вторую величину, зависящую от частоты, и
четвертый цифровой фильтр, соединяющий квадратурный входной порт с квадратурным выходным портом; и
по меньшей мере один контроллер коррекции, выполненный с возможностью регулировать коэффициенты отвода фильтра первого цифрового фильтра, второго цифрового фильтра, третьего цифрового фильтра и четвертого цифрового фильтра, чтобы уменьшить по меньшей мере одну разность между характеристикой передачи синфазного сигнального тракта, выполненного с возможностью передачи синфазной части сигнала, и характеристикой передачи квадратурного сигнального тракта, выполненного с возможностью передачи квадратурной части сигнала.
10. Схема коррекции по п.9, в которой один или более цифровых фильтров схемы цифрового фильтра являются фильтром с конечной импульсной характеристикой.
11. Схема коррекции по п.9, в которой один или более цифровых фильтров схемы цифрового фильтра являются фильтром с бесконечной импульсной характеристикой.
12. Схема коррекции по п.9, в которой один или более цифровых фильтров схемы цифрового фильтра содержат полиномиальную структуру на основе ряда Вольтерры.
| Фильтровальная плита | 1987 |
|
SU1489803A1 |
| МНОГОКРАТНОЕ АНАЛОГОВОЕ И ЦИФРОВОЕ ПОНИЖАЮЩЕЕ ПРЕОБРАЗОВАНИЕ | 2002 |
|
RU2305892C2 |
| EP 1895735 A1, 05.03.2008 | |||
| МНОГОКАНАЛЬНЫЙ ПЕРЕПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ПРИЕМНЫЙ ТРАКТ | 2004 |
|
RU2289202C2 |
| US 6597727 B2, 22.07.2003 | |||

