Изобретение относится к оптико-электронному приборостроению и системам дистанционного зондирования земной поверхности, а конкретно - к лазерным системам наблюдения воздушного базирования.
Известны лазерные системы наблюдения и оптико-локационные станции (лидары), предназначенные для дистанционного обнаружения и наблюдения объектов или поверхностей [1. RU 188539 от 10.12.2018; 2. RU 2450397 от 30.09.2005; 3. RU 148255 от 04.04.2014; 4. RU 2540451 от 25.09.2013; 5. RU 2447401 от 19.10.2010; 6. RU 2717362 16.08.2019]. Они содержат лазер подсвета наблюдаемой поверхности, передающую (выходную, или формирующую) и приемную (входную) оптические системы, сканирующее устройство (дефлектор), матричное фотоприемное устройство (ФПУ), блок электронной обработки сигналов изображения и монитор. Недостатком аналогов является отсутствие защиты от обратно рассеянного (обратно отраженного) атмосферой лазерного излучения подсвета наблюдаемой поверхности, являющегося мультипликативной помехой, в результате чего резко снижается отношение сигнал/шум в формируемом изображении, а, следовательно, его качество. В патенте RU 188539 от 10.12.2018 описано лазерное устройство видения, в котором для защиты от постоянной засветки от рассеянного взвешенными в атмосфере частицами и молекулами воздуха излучения приемник оптического излучения снабжен затвором, открывающимся в момент прихода лазерного импульса, отраженного объектом. Время задержки и длительность открытого состояния затвора регулируются блоком управления. Однако оно не обеспечивает защиту от обратно отраженного рассеивающей атмосферой лазерного излучения. Наиболее близкой заявляемому изобретению является система импульсной лазерной локации по патенту RU 2717362 от 16.08.2019, содержащая импульсный лазер, выходную оптическую систему передающего канала, формирующую с помощью входящей в нее дифракционной решетки N коллимированных лазерных пучков, фотоприемное устройство в виде однорядной линейки N фотоприемных чувствительных элементов, однокоординатное сканирующее устройство, осуществляющее параллельное сканирование зондируемой поверхности линейкой N коллимированных лазерных пучков, оптический объектив фотоприемного устройства и вычислительное устройство.
Недостатком системы-прототипа при работе в атмосфере является отсутствие защиты от обратно отраженного рассеивающей атмосферой лазерного излучения, расположенной между лазерным источником подсвета и зондируемой поверхностью.
Задача изобретения - уменьшить влияние обратно отраженного рассеивающей атмосферой лазерного излучения подсвета на качество формируемого изображения.
Технический результат достигается за счет того, что лазерную систему наблюдения, включающую в себя функционально связанные импульсный лазер, выходную оптическую систему передающего канала, формирующую с помощью входящей в нее дифракционной решетки N коллимированных лазерных пучков, фотоприемное устройство в виде однорядной линейки N фотоприемных чувствительных элементов, однокоординатное сканирующее устройство, осуществляющее параллельное сканирование зондируемой поверхности линейкой N коллимированных лазерных пучков, оптический объектив фотоприемного устройства и вычислительное устройство, в передающий канал системы введены дополнительный дефлектор и управляющее устройство, при этом выход управляющего устройства связан с входом дополнительного дефлектора, дополнительный дефлектор установлен на выходе передающего канала, на вход управляющего устройства подаются сигналы, пропорциональные истинной геометрической высоте полета hГ, частоте строчного сканирования FС и текущему значению угла сканирования β, на основании которых управляющее устройство формирует сигнал u(α), управляющий дополнительным дефлектором, отклоняющим лазерный пучок подсвета относительно мгновенного угла поля зрения приемного канала на некоторый угол α - угол между направлением распространения лазерного излучения подсвета и направлением приема отраженного лазерного излучения, пропорциональный времени распространения лазерного излучения до зондируемой поверхности и обратно и вычисляемый по формуле:

где с - скорость света, м/с.
Дополнительный дефлектор выполняет пространственное разнесение направлений лазерного подсвета и приема отраженного лазерного излучения путем доворота на угол α направления лазерного подсвета в направлении сканирования относительно направления мгновенного поля зрения приемного канала системы наблюдения в зависимости от текущего значения угла сканирования 2β с частотой, равной частоте FС строчного сканирования. Согласно полученной формуле, угол α уменьшается от края к центру строки и увеличивается от центра к краю строки сканирования в зависимости от текущего значения угла β.
Дополнительный дефлектор может быть выполнен в виде пьезоэлектрического дефлектора, увеличивающего угол отклонения лазерного пучка подсвета от направления мгновенного угла поля зрения приемного канала к краю строки в соответствии с управляющим электрическим сигналом u(α), зависящим от угла α, определяемого приведенной формулой (1), или в виде оптического преломляющего элемента в форме сдвоенного криволинейного оптического клина, длинная сторона которого выполнена криволинейной по закону, соответствующему приведенной формуле (1), толщина и, соответственно, показатель преломления n которого изменяется от центра строки к краю по формуле:

где n0 - показатель преломления оптического клина в центре строки сканирования, при β=0; k - некоторый постоянный коэффициент (коэффициент согласования размерности); n(β) - некоторая нелинейная функция зависимости показателя преломления от угла β.
Однокоординатное сканирующее устройство является оптико-механическим и выполнено в виде совмещенных нижними основаниями усеченных трехгранных пирамид с единым электроприводом.
Заявляемое изобретение иллюстрируется чертежами:
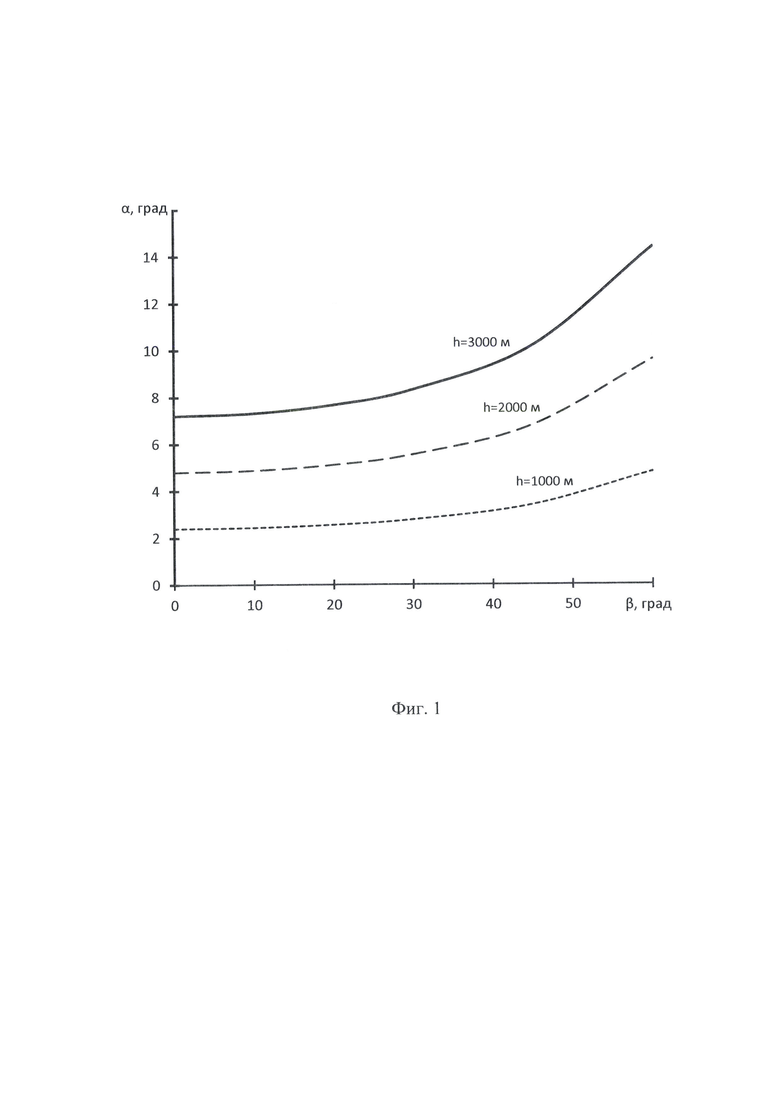
- фиг. 1 - график зависимости угла пространственного разнесения передающего и приемного каналов системы от угла сканирования α(β) для высот наблюдения 1000 м, 2000 м и 3000 м;
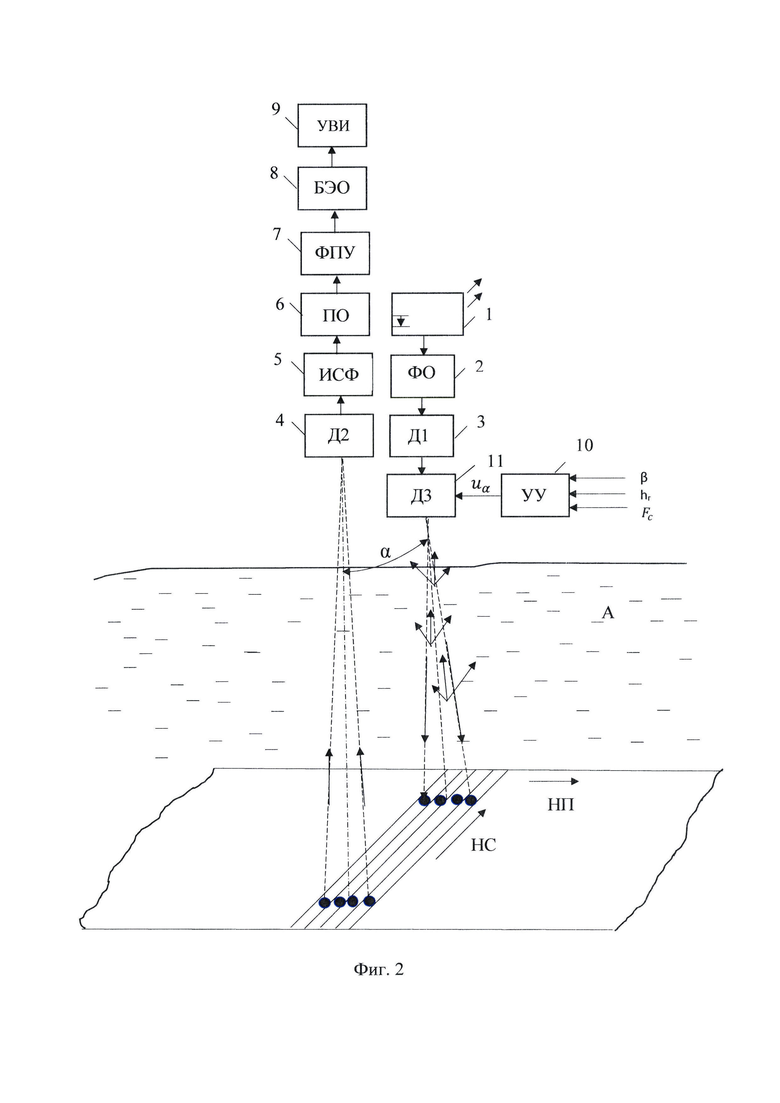
- фиг. 2 - функциональная схема лазерной системы наблюдения;
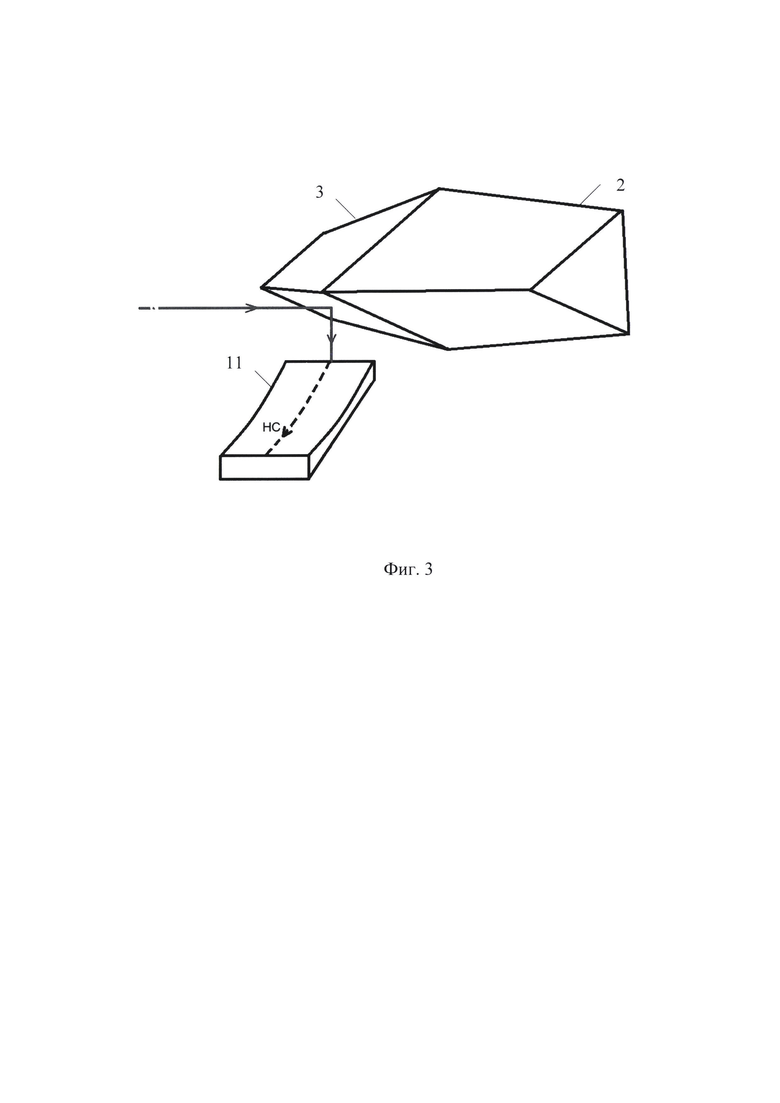
- фиг. 3 - конструкция дополнительного дефлектора.
На фиг. 2, 3 использованы следующие обозначения: 1 - лазер подсвета; 2 - формирующая оптика; 3 - дефлектор лазера подсвета Д3; 4 - дефлектор приемного канала Д2; 5 - интерференционный светофильтр (ИСФ); 6 - приемная оптика; 7 - матричное фотоприемное устройство; 8 - блок электронной обработки сигналов изображения; 9 - устройство визуализации и хранения изображений (УВИ); 10 - управляющее устройство; 11 -дополнительный дефлектор Д3.
Заявляемая лазерная система наблюдения работает следующим образом. Излучение от лазера подсвета 1 через формирующую оптику 2 и дефлектор 3, проходя через атмосферу, отражается обратно, в направлении приемного канала ЛСН, взвешенными в рассеивающей атмосфере частицами и молекулами воздуха. Дополнительный дефлектор 11 выполняет пространственное разнесение направлений лазерного подсвета и приема отраженного лазерного излучения на угол α, пропорциональный времени распространения лазерного излучения до зондируемой поверхности и обратно. Величина угла отклонения изменяется в зависимости от высоты hГ, частоты FС строчного сканирования и текущего значения угла сканирования β управляющим устройством 10. Отраженное лазерное излучение проходя через дефлектор 4 приемного канала, интерференционный светофильтр 5, приемную оптику 6 попадает на матричное фотоприемное устройство 7, после считывания с которого попадает в устройство электронной обработки сигналов изображений 8 и далее - в устройство визуализации и хранения изображений 9. Ввиду зависимости угла α от высоты наблюдения (см. фиг. 1) лазерная система наблюдения оснащается комплектом сменных оптических клиньев в зависимости от высоты применения лазерной системы.
Технический результат заключается в значительном уменьшении влияния обратно отраженного рассеивающей атмосферой лазерного излучения подсвета на качество формируемого изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2528109C1 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| СИСТЕМА ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2540451C1 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| КОМБИНИРОВАННАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2014 |
|
RU2541494C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
Изобретение относится к оптико-электронным системам дистанционного зондирования, к лазерным системам наблюдения. Лазерная система наблюдения включает импульсный лазер, выходную оптическую систему передающего канала, формирующую с помощью дифракционной решетки коллимированные лазерные пучки, фотоприемное устройство однорядной линейки фотоприемных чувствительных элементов, однокоординатное сканирующее устройство, оптический объектив и вычислительное устройство, в передающий канал введены дополнительный дефлектор и управляющее устройство, дополнительный дефлектор установлен на выходе передающего канала, на вход управляющего устройства подаются сигналы, пропорциональные истинной геометрической высоте полета, частоте строчного сканирования и текущему значению угла сканирования, на основании которых управляющее устройство формирует управляющий сигнал u(α), где α - угол между направлением распространения лазерного излучения подсвета и направлением приема отраженного лазерного излучения, дополнительный дефлектор выполняет пространственное разнесение направлений лазерного подсвета и приема отраженного лазерного излучения на угол α с частотой сканирования. Технический результат уменьшение влияния отраженного атмосферой лазерного излучения подсвета на качество формируемого изображения. 3 з.п. ф-лы, 3 ил.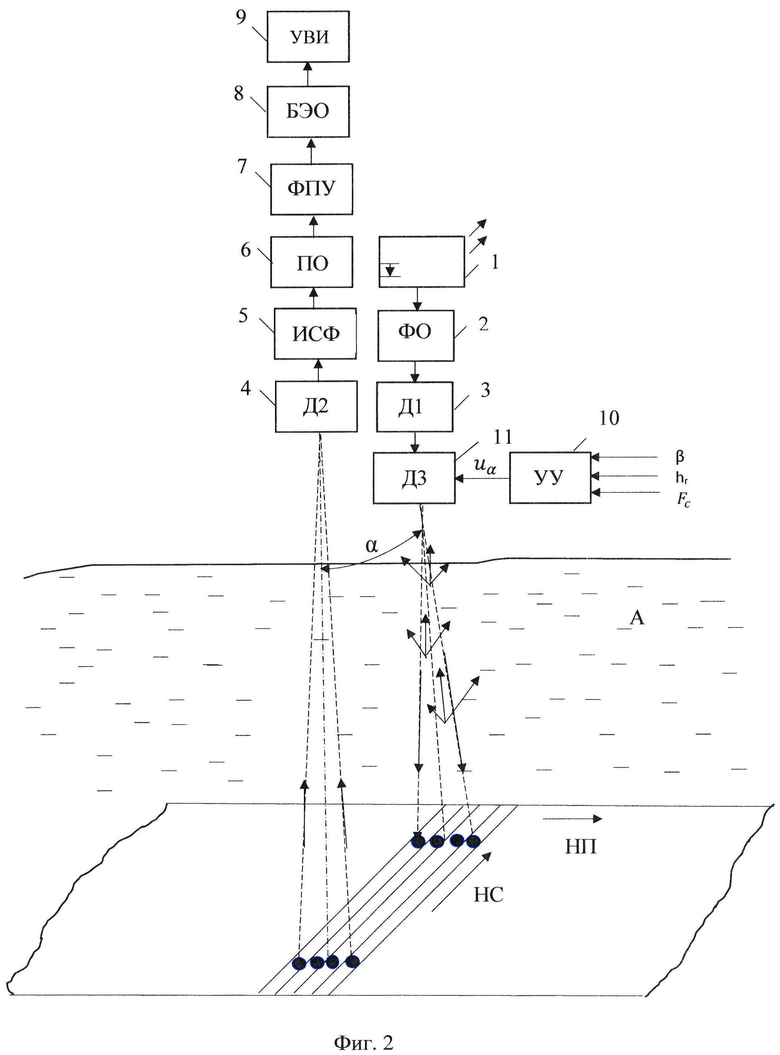
1. Лазерная система наблюдения, включающая в себя функционально связанные импульсный лазер, выходную оптическую систему передающего канала, формирующую с помощью входящей в нее дифракционной решетки N коллимированных лазерных пучков, фотоприемное устройство в виде однорядной линейки N фотоприемных чувствительных элементов, однокоординатное сканирующее устройство, осуществляющее параллельное сканирование зондируемой поверхности линейкой N коллимированных лазерных пучков, оптический объектив фотоприемного устройства и вычислительное устройство, отличающаяся тем, что в передающий канал системы введены дополнительный дефлектор и управляющее устройство, при этом выход управляющего устройства связан с входом дополнительного дефлектора, дополнительный дефлектор установлен на выходе передающего канала, на вход управляющего устройства подаются сигналы, пропорциональные истинной геометрической высоте полета hГ, частоте строчного сканирования FС и текущему значению угла сканирования β, на основании которых управляющее устройство формирует сигнал u(α), управляющий дополнительным дефлектором, отклоняющим лазерный пучок подсвета относительно мгновенного угла поля зрения приемного канала на некоторый угол α между направлением распространения лазерного излучения подсвета и направлением приема отраженного лазерного излучения, пропорциональный времени распространения лазерного излучения до зондируемой поверхности и обратно и вычисляемый по формуле:

где с - скорость света, м/с.
2. Лазерная система наблюдения по п. 1, отличающаяся тем, что дополнительный дефлектор выполняет пространственное разнесение направлений лазерного подсвета и приема отраженного лазерного излучения путем доворота на угол α направления лазерного подсвета в направлении сканирования относительно направления мгновенного поля зрения приемного канала системы наблюдения в зависимости от текущего значения угла сканирования с частотой, равной частоте FС строчного сканирования, при этом угол α уменьшается от края к центру строки и увеличивается от центра к краю строки сканирования в зависимости от текущего значения угла сканирования.
3. Лазерная система наблюдения по п. 1, отличающаяся тем, что дополнительный дефлектор представляет собой пьезоэлектрический дефлектор, увеличивающий угол отклонения лазерного пучка подсвета от направления мгновенного угла поля зрения приемного канала к краю строки в соответствии с управляющим электрическим сигналом u(α), зависящим от угла α, определяемого приведенной формулой.
4. Лазерная система наблюдения по п. 1, отличающаяся тем, что дополнительный дефлектор представляет собой оптический преломляющий элемент в виде сдвоенного криволинейного оптического клина, длинная сторона которого выполнена криволинейной по закону, соответствующему приведенной формуле, а показатель преломления n которого изменяется от центра строки к краю по формуле: n=n0+kn(β), где n0 - показатель преломления оптического клина в центре строки сканирования, при β=0; k - коэффициент согласования размерности; n(β) - некоторая нелинейная функция зависимости показателя преломления от угла β.
| СПОСОБ РАСПОЗНАВАНИЯ ЛОКАЦИОННЫХ ОПТИЧЕСКИХ СИГНАЛОВ | 2017 |
|
RU2698514C2 |
| СИСТЕМА ИМПУЛЬСНОЙ ЛАЗЕРНОЙ ЛОКАЦИИ | 2019 |
|
RU2717362C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| УЗЕЛ СИЛОВОЙ КОМПЕНСАЦИИ | 0 |
|
SU170789A1 |
| СПОСОБ ПОЛУЧЕНИЯ КАТАЛИЗАТОРА ПОЛИМЕРИЗАЦИИ ЛАКТОНОВ ИЛИ ПОЛИКОНДЕНСАЦИИ АЛЬФА-ОКСИКИСЛОТ | 2013 |
|
RU2525235C1 |
| EP 3170023 B1, 04.11.2020. | |||

