Изобретение относится к транспортным средствам, а именно к вспомогательным устройствам, приводимым в действие непосредственно от колебательного движения взаимосвязанных подрессоренных и неподрессоренных масс, возникающего при движении транспортного средства, например при перемещении элементов подвески.
Известна система управления электроамортизатором-преобразователем подвески транспортного средства (см. патент GB №1457636, кл. В60K 25/10, 1976 г.), содержащая прикрепленный к основанию транспортного средства статор с магнитопроводом и обмоткой и якорь в виде постоянного магнита, соединенный через шток с осью колеса и установленный с возможностью возвратно-поступательного перемещения внутри обмоток.
Недостатком известной системы является то, что она не обеспечивает регулирование параметров демпфирования колебаний подрессоренных масс и управления процессом передачи энергии на аккумулятор.
Известна система управления электроамортизатором-преобразователем подвески транспортного средства (см. патент RU №2079956, кл. В60K 25/10, 1997 г.), содержащая амортизатор, закрепленный одним концом на подрессоренной массе, корпусе транспортного средства, а другим концом на неподрессоренной массе, рычаге с колесом, связанный со статором с фазными обмотками, и якорь в виде постоянных магнитов, с возможностью возвратно-поступательного перемещения внутри фазных обмоток, передающие элементы, связывающие по цепи фазные обмотки с потребителями и аккумуляторной батареей.
Недостатком известной системы является то, что она не обеспечивает регулирование параметров демпфирования колебаний подрессоренных масс и управления процессом передачи энергии на аккумулятор.
Задачей предложенного решения является расширение эксплуатационных возможностей за счет регулирования параметров демпфирования колебаний подрессоренных масс, управления процессом передачи энергии на аккумулятор и обеспечения управления плавностью хода.
Эта задача достигается тем, что система управления электроамортизатором-преобразователем подвески транспортного средства, содержащая амортизатор, закрепленный одним концом на подрессоренной массе, корпусе транспортного средства, а другим концом на неподрессоренной массе, рычаге с колесом, связанный со статором с фазными обмотками, и якоря в виде постоянных магнитов, с возможностью возвратно-поступательного перемещения внутри фазных обмоток, передающие элементы, связывающие по цепи фазные обмотки с потребителями и аккумуляторной батареей, на подрессоренной и неподрессоренной массах установлены датчики ускорений, а между ними установлен датчик относительных перемещений, взаимодействующие с блоком управления демпфированием подвески, который включает дифференцирующие звенья и интегрирующие звенья и задатчик допустимого уровня колебаний подрессоренных масс, передающие элементы между фазными обмотками и аккумуляторной батареей выполнены в виде связанных по цепи выпрямителей, силовых ключей, нагрузочных сопротивлений, выполненных переменными с нелинейной характеристикой, накопительных конденсаторов, понижающе-повышающих преобразователей, блока управления зарядом аккумуляторной батареи, датчиков напряжения и тока, причем блок управления демпфированием подвески связан с силовыми ключами каждой фазы, а блок управления зарядом аккумуляторной батареи связан с понижающее-повышающими преобразователями каждой фазы.
По сравнению с известной предложенная система управления электроамортизатором-преобразователем подвески транспортного средства обеспечивает расширение эксплуатационных возможностей за счет регулирования параметров демпфирования колебаний подрессоренных масс путем обеспечения регулирования тока электромеханического преобразователя и управления процессом передачи энергии на аккумулятор с последующим использованием в приводе и питании электропотребителей.
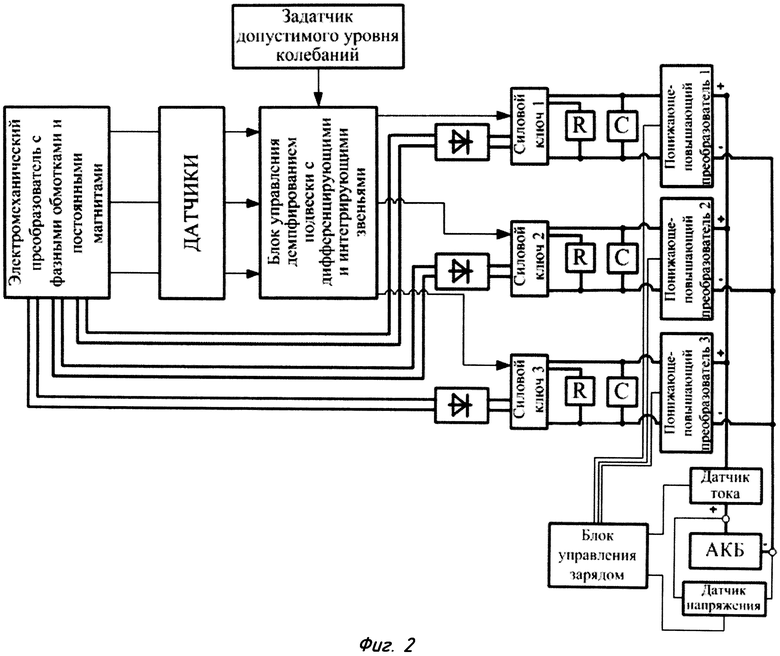
На фиг.1 изображена принципиальная схема устройства; на фиг.2 - то же, структурная схема устройства.
Система управления электроамортизатором-преобразователем подвески транспортного средства содержит амортизатор 1, закрепленный одним концом на подрессоренной массе, корпусе транспортного средства 2, а другим концом на неподрессоренной массе, рычаге 3 с колесом 4, связанный со статором с фазными обмотками 5, и якоря 6 в виде штока с постоянными магнитами, с возможностью возвратно-поступательного перемещения внутри фазных обмоток 5, составляющих в структурной схеме блок электромеханического преобразователя энергии. На подрессоренной массе, корпусе транспортного средства 1, установлен датчик 7 ускорений, а на неподрессоренной массе, рычаге 3 с колесом 4, установлен датчик 8 ускорений объединенные в блок датчиков (фиг.2). Между датчиками 7 и 8 ускорений установлен датчик 9 относительных перемещений, взаимодействующие с блоком управления 10 демпфированием подвески, который включает дифференцирующие и интегрирующие звенья 11, объединенные в блок управлением демпфированием, и задатчик 12 допустимого уровня колебаний подрессоренных масс. Передающие элементы между фазными обмотками 5 и аккумуляторной батареей 13 выполнены в виде связанных по цепи выпрямителей 14, 15, 16, силовых ключей 17, 18, 19, нагрузочных сопротивлений 20, 21, 22, выполненных переменными с нелинейной характеристикой, накопительных конденсаторов 23, 24, 25, понижающе-повышающих преобразователей 26, 27, 28, блока управления 29 зарядом аккумуляторной батареи 13, датчика 30 напряжения и датчика 31 тока. Блок управления 10 демпфированием подвески связан с силовыми ключами 17, 18, 19 каждой фазной обмотки 5, а блок управления 29 зарядом аккумуляторной батареи 13 связан с понижающе-повышающими преобразователями 26, 27, 28 каждой фазной обмотки 5.
Система управления электроамортизатором-преобразователем подвески транспортного средства работает следующим образом.
При движении неподрессоренной массы, рычага 3 с колесом 4, по неровностям опорной поверхности неподрессоренная масса вызывает перемещения якоря 6 с постоянными магнитами относительно статора с фазными обмотками 5. Движение подрессоренных и неподрессоренных масс регистрируются двумя датчиками 7 и 8 ускорений и датчиком 9 относительных перемещений. Сигнал с датчиков 7, 8 и 9 поступает на блок управления 10 демпфированием подвески, на выходе которого получаем скорость неподрессоренной массы Vi, подрессоренной массы Уз и относительную скорость AV перемещения масс. Полученные сигналы обрабатываются блоком управления 10 демпфированием подвески и сравниваются с сигналом задатчика 12 допустимого уровня колебаний подрессоренных масс. Дальше сигнал управления подается на силовые ключи 17, 18, 19 каждой фазы, и таким образом открывается цепь включения каждой фазной обмотки 5 на нагрузочные сопротивления 20, 21, 22 и накопительные конденсаторы 23, 24, 25. При движении якоря и статора в зависимости от относительной скорости движения масс AV и состояния силовых ключей 17, 18, 19 в каждой фазной обмотке 5 наводится ЭДС и переменный ток поступает на соответствующие выпрямители 14, 15, 16, силовые ключи 17, 18, 19, нагрузочные сопротивления 20, 21, 22 и накопительные конденсаторы 23, 24, 25. За счет регулирования величины нагрузочных сопротивлений 20, 21, 22 при нелинейных их характеристиках задается ток в фазных обмотках 5 и, соответственно, сила демпфирования подвески транспортного средства. Также в зависимости от длительности и величины управляющего сигнала с блока управления 10 демпфированием подвески на силовые ключи 17, 18, 19 регулируется величина силы демпфирования. Энергия, накопленная в накопительных конденсаторах 23, 24, 25 поступает в понижающе-повышающие преобразователи 26, 27, 28, а с них по сигналу с блока управления 29, который формируется с учетом сигналов с датчика 30 напряжения и датчика 31 тока, на аккумуляторную батарею 13. Сигналы с блока управления 29 зарядом определяются в зависимости от состояния аккумуляторной батареи 13.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ САМОВЫТАСКИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2340482C1 |
| Транспортное средство | 2017 |
|
RU2645512C1 |
| УСТРОЙСТВО ДИАГНОСТИКИ РАБОТОСПОСОБНОСТИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2529944C1 |
| ЭЛЕКТРОПРИВОД КОЛЕС АВТОМОБИЛЯ | 2008 |
|
RU2373077C1 |
| Источник сейсмических колебаний | 1989 |
|
SU1642415A2 |
| Устройство управления двухпоточной муфтой сцепления транспортного средства | 2015 |
|
RU2622438C2 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| Самоходный источник сейсмических колебаний | 1988 |
|
SU1608604A1 |
| СИСТЕМА ФИКСАЦИИ ГОЛА НА ФУТБОЛЬНЫХ ВОРОТАХ | 2013 |
|
RU2524012C1 |
| Источник сейсмических колебаний | 1984 |
|
SU1236395A1 |
Изобретение относится к машиностроению. Система управления содержит амортизатор, связанный со статором с фазными обмотками. Якоря выполнены в виде постоянных магнитов с возможностью возвратно-поступательного перемещения внутри фазных обмоток. Передающие элементы связывают по цепи фазные обмотки с потребителями и аккумуляторной батареей. На подрессоренной и неподрессоренной массах установлены датчики ускорений, а между ними установлен датчик относительных перемещений. Блок управления демпфированием подвески включает дифференцирующие, интегрирующие звенья и задатчик допустимого уровня колебаний подрессоренных масс. Передающие элементы между фазными обмотками и аккумуляторной батареей выполнены в виде связанных по цепи выпрямителей, силовых ключей, нагрузочных сопротивлений, накопительных конденсаторов, понижающе-повышающих преобразователей, блока управления зарядом аккумуляторной батареи, датчиков напряжения и тока. Блок управления демпфированием подвески связан с силовыми ключами каждой фазы, а блок управления зарядом аккумуляторной батареи - с понижающе-повышающими преобразователями каждой фазы. Достигается возможность регулирования параметров демпфирования колебаний подрессоренных масс и управления процессом передачи энергии на аккумулятор. 2 ил.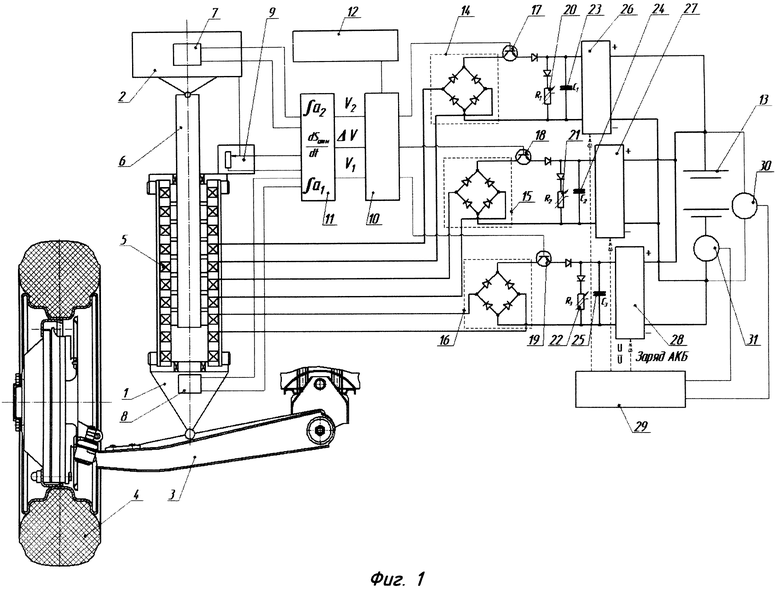
Система управления электроамортизатором-преобразователем подвески транспортного средства, содержащая амортизатор, закрепленный одним концом на подрессоренной массе, корпусе транспортного средства, а другим концом на неподрессоренной массе, рычаге с колесом, связанный со статором с фазными обмотками, и якоря в виде постоянных магнитов, с возможностью возвратно-поступательного перемещения внутри фазных обмоток, передающие элементы, связывающие по цепи фазные обмотки с потребителями и аккумуляторной батареей, отличающаяся тем, что на подрессоренной и неподрессоренной массах установлены датчики ускорений, а между ними установлен датчик относительных перемещений, взаимодействующие с блоком управления демпфированием подвески, который включает дифференцирующие звенья и интегрирующие звенья и задатчик допустимого уровня колебаний подрессоренных масс, передающие элементы между фазными обмотками и аккумуляторной батареей выполнены в виде связанных по цепи выпрямителей, силовых ключей, нагрузочных сопротивлений, выполненных переменными с нелинейной характеристикой, накопительных конденсаторов, понижающе-повышающих преобразователей, блока управления зарядом аккумуляторной батареи, датчиков напряжения и тока, причем блок управления демпфированием подвески связан с силовыми ключами каждой фазы, а блок управления зарядом аккумуляторной батареи связан с понижающе-повышающими преобразователями каждой фазы.
| ЛИНЕЙНЫЙ ГЕНЕРАТОР-КОМПРЕССОР ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2079956C1 |
| Амортизатор | 1980 |
|
SU932001A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| CN 1730967 A, 08.02.2006 | |||

