Настоящее изобретение относится к области электротехники, в частности к управлению электроприводом на базе асинхронного двигателя с короткозамкнутым ротором, и может быть использовано в системах управления асинхронными электроприводами транспортных средств.
Сегодня электроприводы, построенные на базе асинхронной машины (AM) с применением векторного управления при ориентации по вектору потокосцепления ротора (в зарубежной литературе - "Field-oriented Control"), получили достаточно широкое применение в разных электромеханических установках с высокими требованиями к показателям регулирования в статике и динамике.
Алгоритм векторного управления предполагает разделение вектора тока статора I на две составляющие - потокообразующую Id и моментообразующую Iq, которые являются проекциями вектора тока на оси вращающейся ортогональной системы координат d-q, ориентированной по вектору потокосцепления ротора ψr. Следует отметить, что именно такой принцип ориентации дает возможность раздельно управлять составляющими тока статора AM, иными словами - раздельно управлять магнитным потоком и электромагнитным моментом машины. Принцип векторного управления на сегодняшний день подробно описан как в отечественной, так и зарубежной научной и профессиональной литературе.
Вместе с тем, асинхронная машина, как объект управления, обладает такими свойствами как нелинейность и нестационарность.
Нелинейность AM обусловлена тем фактом, что в дифференциальные уравнения, математически описывающие электрическую машину, входят слагаемые, пропорциональные произведению переменных состояния (токов, потокосцеплений и частоты вращения). В литературе такие компоненты, как правило, называются перекрестными связями.
Значительно снизить влияние перекрестных связей, как правило, удается за счет введения в структуру системы управления (СУ) блока компенсации перекрестных связей.
Нестационарность AM обусловлена варьированием параметров обмоток из-за влияния различных факторов. Так, например, активные сопротивления статора и ротора машины меняются как вследствие нагрева обмоток, так и из-за поверхностного эффекта (скин-эффект). Взаимная индуктивность в наибольшей степени зависит от магнитного потока машины, но также может коррелировать с частотой вращения (как правило, в значительно меньшей мере). Такие параметры электрической машины (ЭМ), как индуктивности рассеяния статора и ротора, достаточно малы в соотношении с величиной взаимной индуктивности, поэтому их можно принять константами.
В то же время, для качественного регулирования составляющих статорного тока по продольной и поперечной осям, СУ должна иметь достоверную информацию о текущих параметрах AM в процессе работы.
Объясняется это тем, что СУ, среди прочих, включает в себя блок определения (идентификации или расчета) параметров вектора потокосцепления ротора, а именно - его модуля и угла поворота. Этот блок выполняет одну из ключевых функций в структуре системы векторного управления, т.к. сигнал угла поворота вектора потокосцепления участвует в преобразовании координат (переход из трехфазной неподвижной в двухфазную вращающуюся), а сигнал модуля данного вектора участвует в системе управления для формирования заданного электромагнитного момента, а также для обратной связи контура регулирования потокосцепления.
В настоящее время вышеуказанные величины определяются косвенным (бездатчиковым) способом, а не прямым (посредством датчика). В свою очередь, структура блока определения параметров вектора потокосцепления строится на базе части математического описания AM. Чаще всего за основу берутся уравнения роторной цепи ЭМ при ее математическом описании в ортогональной системе координат d-q. Эти уравнения содержат, в частности, такие параметры ЭМ, как взаимная индуктивность статора и ротора Lm, а также зависящая от нее постоянная времени ротора Тr.
Процесс получения информации о вышеуказанных параметрах AM называется идентификацией (или определением, оценкой). Существуют разные способы идентификации параметров обмоток электрических машин, в частности, асинхронных, которые условно можно поделить на два типа:
1) идентификация в режиме online (в процессе штатной работы электромеханической установки);
2) предварительная идентификация.
Первый тип идентификации (в online-режиме), как правило, связан с применением поисковых динамически изменяемых алгоритмов непосредственно в процессе работы (эксплуатации) электропривода. Главным преимуществом таких алгоритмов является отсутствие необходимости в каких-либо предварительных процедурах, а недостатками - сложность их синтеза и необходимость в выделении дополнительных энергетических и вычислительных ресурсов управляющего контроллера.
Второй тип, как понятно из названия, основан на процедуре предварительной идентификации параметров с применением, как правило, последующей обработки результатов и включение их в алгоритм управления в виде справочных таблиц (в иностранной литературе распространен термин-"Lookup Table") или в виде степенных полиномиальных зависимостей, для дальнейшего использования в процессе штатной работы. Главное преимущество такого способа - однократное проведение процедуры идентификации с последующим применением ее результатов.
Так, например, из уровня техники известен способ идентификации постоянной времени для ротора асинхронного двигателя (см. патентный документ CN 107896079, опубл. 10.04.2018). Данный способ относится ко второму типу идентификации. Известный способ основан на построении модели формирования потока ротора и имеет достаточно сложный алгоритм определения постоянной времени.
В настоящей заявке также описан способ, относящийся ко второму типу идентификации. Такой способ предполагает наличие некоторого набора программных и аппаратных средств, а также требует выполнения некоторой последовательности действий (алгоритма), что описано в настоящей заявке. Данный алгоритм осуществляется с применением аппаратных средств с соответствующим программным обеспечением (ПО), которое реализует его выполнение.
Технический результат, на достижение которого направлено предлагаемое техническое решение, заключается в повышении точности ориентации поля системы векторного управления асинхронным двигателем за счет определения постоянной времени ротора с высокой степенью точности.
Заявленный технический результат достигается созданием способа идентификации постоянной времени Тr ротора асинхронного двигателя в системе векторного полеориентированного управления, заключающегося в том, что осуществляют выполнение следующих этапов:
a) задают начальное значение постоянной времени Тr ротора в блоке оценки потокосцепления ротора и начальное значение тока Id, далее не менее двух раз задаются разные значения тока Iq, при которых измеряется момент на валу асинхронного двигателя;
b) фиксируют в заданный момент времени значения угловой частоты вращения ротора, магнитного потока и нагрузки на роторе, и с учетом этих параметров фиксируют изменение моментообразующей составляющей тока Iq, которая будет соответствовать новому значению Iq1, а также значение электромагнитного момента М, который будет соответствовать новому значению M1, при этом устанавливают, что параметры Iq1 и M1 соответствуют параметрам работы асинхронного двигателя в первой рабочей точке, далее при изменении нагрузки на валу асинхронного двигателя также фиксируют изменение Iq, которая будет соответствовать новому значению Iq2, а также значение электромагнитного момента М, который будет соответствовать новому значению М2, с учетом данных параметров фиксируют переход работы асинхронного двигателя в новую рабочую точку;
c) далее запускают процесс вычисления соотношения токов KI и соотношения моментов КM в разных рабочих точках согласно уравнениям, где KI=Ig2/Ig1 и КM=М2/M1;
d) далее осуществляют проверку выполнения условия, при котором отношение токов должно быть равно отношению моментов, а именно KI=КM;
e) если условие по этапу d) не выполняется, осуществляют корректировку выбранного значения постоянной времени Тr путем ее увеличения или уменьшения и повторяют этапы a)-d) до тех пор, пока условие KI=КM не будет выполняться;
f) осуществляют управление асинхронным двигателем при таком значении постоянной времени Тr ротора, которое привело к выполнению условия KI=КM.
Совокупность всех указанных выше признаков направлена на повышение точности ориентации поля системы векторного управления асинхронным двигателем за счет определения постоянной времени ротора с высокой степенью точности.
Краткое описание чертежей
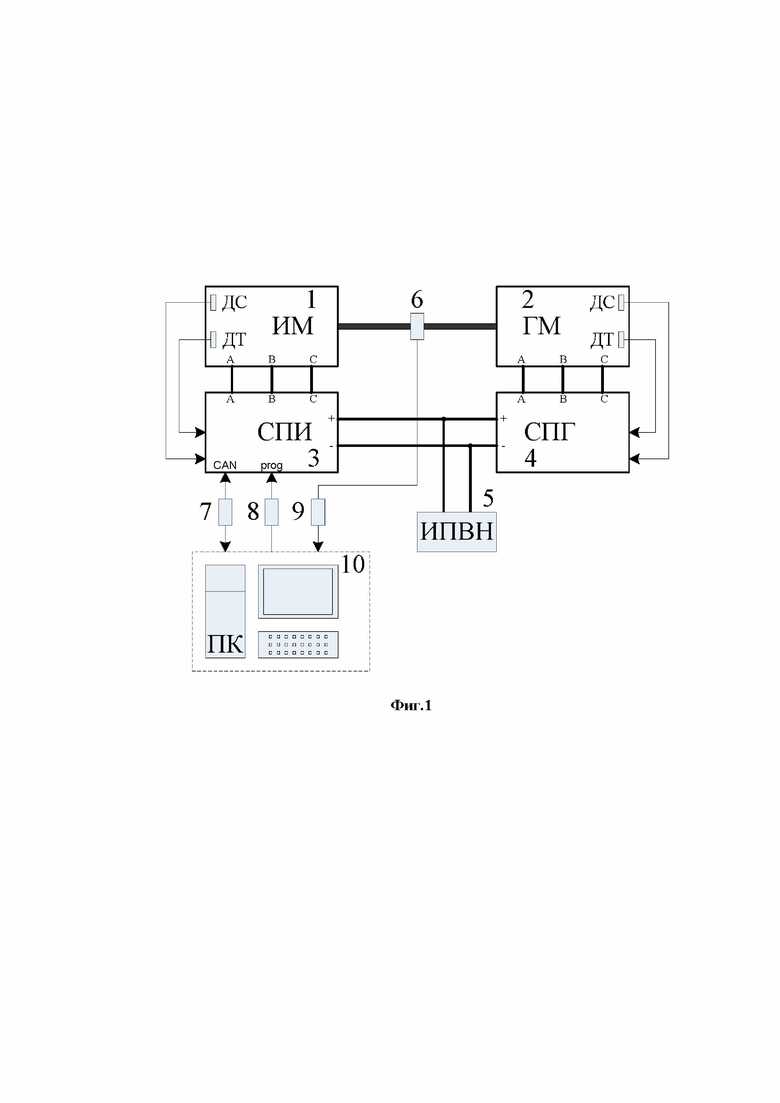
Фиг. 1. Функциональная схема установки для проведения процедуры автоматической идентификации параметров.
Фиг.2. Базовая структура системы управления.
Фиг. 3. Схема алгоритма идентификации параметров.
Описание идеи, положенной в основу предлагаемого способа идентификации постоянной времени ротора.
Рассмотрим уравнения Парка-Горева роторной цепи AM при векторном полеориентированном управлении (1) без учета потерь в стали, которые берутся за основу для оценивания модуля и угла поворота вектора потокосцепления ротора:

где Id, Iq - составляющие тока статора по осям d и q соответственно (или потокообразующий и моментообразующий токи); ψ - модуль вектора потокосцепления (далее - потокосцепление) ротора; Lm - взаимная индуктивность статора и ротора; Tr=Lr/Rr - постоянная времени ротора; Lr=Lrσ+Lm - полная индуктивность ротора; Lrσ - индуктивность рассеяния ротора; Rr - активное сопротивление ротора; zp - число пар полюсов; ω - механическая угловая частота вращения ротора.
Известно также, что электромагнитный момент на валу AM при векторном управлении вычисляется по формуле (2):

В статическом режиме работы AM производную потокосцепления можно считать равной нулю. Тогда потокосцепление будет пропорционально потокообразующему току через параметр взаимной индуктивности. С учетом этого, выражение для частоты вращения вектора потокосцепления ротора (или системы координат d-q) в статическом режиме также преобразуется. Система уравнений (1) для работы AM в статике примет вид (3):

Во втором уравнении системы (3) второе слагаемое называется частотой скольжения вектора потокосцепления ротора.
При этом электромагнитный момент в статическом режиме, исходя из (2) и с учетом первого уравнения (3), рассчитывается по уравнению (4):

На базе уравнений (3) и (4) формируется идея идентификации постоянной времени ротора, которая заключается в следующем. При некотором фиксированном значении потока машины (в статическом режиме эквивалентно потокообразующему току Id), изменение моментообразующей составляющей тока Iq приведет к пропорциональному изменению момента на валу машины в том случае, если ось d системы координат d-q сориентирована точно по вектору потокосцепления ротора. В свою очередь, точной ориентации СК d-q можно добиться, определив постоянную времени ротора с высокой степенью точности, а также точно измерив частоту вращения ротора (например, с помощью датчика).
При этом следует исходить из условия, что в статическом режиме работы нет взаимного влияния составляющих тока статора (Id и Iq).
Диапазон изменения токов Id и Iq выбирается следующим образом. Обычно для машины приводится диапазон изменения статорного тока, при котором она должна работать (с учетом перегрузки). Известно, что полный статорный ток равен  .
.
При этом доля тока Id ориентировочно составляет 1/3, а тока Iq - 2/3. Хотя данное соотношение является сугубо ориентировочным, все же оно позволяет подобрать нужные величины для проведения идентификации.
Итак, зная максимально возможный ток статора можно рассчитать максимальные значения токов Id, Iq: 
 .
.
Величину минимального тока Id рекомендуется выбирать как 10% от максимального значения, или выбирать исходя их минимально возможного тока Id, если таковой известен. Шаг, или приращение, с которым будет инкрементироваться ток Id в ходе процедуры идентификации, также рекомендуется выбирать как 10% от максимума, что обеспечит 10 точек полученных табличных зависимостей постоянной времени и взаимной индуктивности.
Задаваемое время отработки тока Iq должно быть ориентировочно равно (3…5) Тr,нач.
Набор значений токов Iq выбирается исходя из тех соображений, чтобы выполнить замеры момента разной величины. Цель - добиться пропорциональности между Iq и моментом в широком диапазоне их изменения.
Набор значений токов Iq рекомендуется выбирать как 1/6, 1/3, ½, 2/3, 5/6 и 1 от максимума тока Iq, в том случае если задаемся шестью значениями.
Выбор таких параметров, как минимальное значение и приращение токов не является чем-то строгим, а описанное выше носит сугубо рекомендательный характер. Так, например, количество задаваемых точек в диапазоне тока Id, определяемое выбранным приращением, будет влиять на «детализацию» кривых Tr(Id), Lm(Id), т.е. чем больше точек задано - тем более детализированные кривые будут получены.
В свою очередь, увеличение количества задаваемых значений тока Iq будет повышать точность идентификации параметров. Наличие таких факторов как шумы, помехи, класс точности измерительных датчиков, нелинейность самой электрической машины, будет обуславливать ту или иную степень неточности измерения тока и момента. В то же время, слишком большое повышение количества задаваемых значений Iq будет увеличивать 8 продолжительность процедуры идентификации. По этой причине, как компромисс, предлагается использовать 6 значений Iq, при которых измеряется момент на валу машины.
Рассмотрим абстрактный пример. Допустим, AM находится в некоторой рабочей точке в двигательном режиме с фиксированными значениями угловой частоты, магнитного потока и нагрузки. Для данной рабочей точки обозначим Iq=Iq1, М=M1. В некоторый момент времени нагрузка меняется и устанавливается на другом уровне, происходит переход в рабочую точку. Для этой точки обозначим Iq=Iq2, М=М2.
Отношения токов Iq и моментов М во второй точке к таковым в первой точке обозначим как k1 и kM (5):

Тогда при корректной ориентации СК d-q, отношение токов будет равно отношению моментов, т.е.

На практике задачу идентификации постоянной времени ротора с использованием предлагаемого способа можно описать последовательностью действий:
1. Задается некоторое начальное значение постоянной времени ротора в блоке оценки потокосцепления ротора на базе уравнений (1), а также некоторое значение тока Id.
2. Несколько раз (два и более) задаются разные значения тока Iq, при которых измеряется момент на валу машины.
3. Вычисляются соотношения токов Iq и моментов в разных точках по уравнениям (5).
4. Проверяется выполнение условия (6). Если условие не выполняется, выбранное значение постоянной времени необходимо корректировать и проводить описанные действия до тех пор, пока условие (6) не будет выполняться.
Иными словами, процесс идентификации Тr представляет собой, скорее, ее определение методом последовательных приближений.
Расчет взаимной индуктивности статора и ротора.
Введем понятие эквивалентной индуктивности, которая равна:

В то же время, из уравнения (4), полагая, что система координат d-q сориентирована по потокосцеплению ротора (т.е. постоянная времени ротора, в соответствие с вышеизложенным, определена корректно), запишем:

Значит, имея значение измеренного момента, а также токов по осям d,q, можно рассчитать эквивалентную, а затем и взаимную индуктивность, по уравнению, вытекающему из (7):

Положительный корень данного квадратного уравнения будет являться искомым для расчета параметра взаимной индуктивности (поскольку отрицательной индуктивность быть не может):

В уравнение (10) входит параметр индуктивности рассеяния ротора Lrσ, который, как правило, значительно меньше полной индуктивности ротора (обычно составляет около 5% от ее величины) и считается константой, т.е. не зависит (или мало зависит) от каких-либо величин. Данный параметр должен быть известен при проведении процедуры идентификации.
Особенности реализации алгоритма идентификации на практике.
Оценку постоянной времени ротора целесообразно выполнять, используя величину, характеризующую отношение величин kM и kI в процентах, пользуясь ниже приведенной формулой, предлагаемой в настоящей заявке:

На практике данная величина показывает, насколько верно определена постоянная времени ротора по ее отклонению от 100%.
Иными словами, при работе электропривода с пока еще не определенным параметром Тr, изначально необходимо задаться некоторым ее базовым значением.
У асинхронных машин есть номинальные параметры схемы замещения, в которые входят величины сопротивления ротора Rr, индуктивности рассеяния ротора Lrσ, а также взаимной индуктивности Lm. Первая величина Rr обычно зависит от температуры ротора и меняется в процессе нагрева машины, вторая величина Lrσ относительно мала и, как правило, считается постоянной, третья величина Lm меняется в зависимости от магнитного потока машины в широком диапазоне (она также подлежит идентификации).
Постоянная времени ротора равна
Начальное (или базовое) значение величины Тr рекомендуется рассчитывать исходя из Rr для нагретой машины, которое обычно приводится, а также исходя из Lm для номинального потока машины.
Тем не менее, если даже базовая величина Тr по каким-то причинам окажется далека от истинного начального значения (то есть от такового в начальной точке Id=Id,min), алгоритм идентификации сам подберет данную величину должным образом.
По результатам измерений моментов М и токов Iq в некоторых статических точках, рассчитываются величины kI, kM, kMI. В том случае, если kMI превышает 100%, подобранный параметр Тr выше истинного значения, в противном случае - наоборот.
Кроме того, идентификацию постоянной времени предлагается выполнять в относительных единицах, т.е., задавшись базовой величиной Тr,b, использовать варьируемый коэффициент kT, который будет показывать отклонение постоянной времени от Тr,b в соответствие с формулой (12):

Важно также отметить, что по причине не идеальности измерений, наличия шумов и помех, в реальном алгоритме идентификации для повышения точности оценивания, может потребоваться не два (как описано выше), а большее количество измерений токов и крутящих моментов.
Например, программно реализованный авторами настоящей заявки алгоритм идентификации предполагает использование шести измерений токов Iq и соответствующих крутящих моментов М при фиксированном токе Id. Другими словами, при фиксированном заданном значении тока Id, последовательно устанавливаются шесть значений тока Iq, при которых измеряется крутящий момент на валу электрической машины. В результате получаем по пять (на 1 меньше, чем число измерений) величин kI, kM и kMI. После этого следует рассчитать среднее арифметическое значение kMI,av по результатам шести измерений крутящих моментов используя выражение (13):
Следует также задаться некоторой точностью оценивания ΔkMI,tol (в процентах), которая будет формировать доверительный интервал (100 - ΔkMI,tol)…(100 + ΔkMI,tol), что необходимо по причине не идеальности измерений.
Смысл величины ΔkMI,tol заключается в том, что при попадании по итогам измерений величины kMI,av в заданный доверительный интервал, можно считать идентифицированное значение постоянной времени достоверным.
В случае не попадания kMI,av в доверительный интервал, процедуру следует повторить, изменив должным образом коэффициент kT с помощью приращения ΔkT.
Критерием успешного подбора (идентификации) величины Тr является тот факт, что соотношения токов Iq на текущем и предыдущем шаге точно такое же, как и соотношение моментов. Это означает что система координат d-q сориентирована верно, т.е. та величина Тr, которая заложена в системе векторного управления (т.е. в управляющем контроллере) совпадает с таковой в машине. Для того чтобы оценить, насколько эти соотношения реально близки, существует такие величины как соотношение токов Iq (kI) и соотношение моментов (kM).
Иными словами, если kI=kM, считаем что в данной точке, т.е. при текущем заданном токе Id мы подобрали верную величину Тr, и можно переходить к следующей точке Id.
Однако на практике kI и kM никогда не будут абсолютно точно равны, но могут быть довольно близки по значению. Чтобы установить степень этой близости, существует величина kMI=kM/kI ⋅ 100%, которая показывает в процентах, насколько соотношение моментов больше или меньше соотношений токов Iq. Доверительный интервал определяет тот факт, что, к примеру, идентифицированная постоянная времени ротора определена верно с такой-то точностью.
Допустим, мы задали точность 1%. По результатам измерений мы получили, что kMI=99,2%, т.е. до 100% не дотягиваем 0,8%, что меньше, чем установленный доверительный интервал. Значит, все подобрали верно. Если же оказалось бы, что kMI=98,9% или ниже, то это означало бы что текущее заданное Тr ниже, чем истинное, а значит, его нужно скорректировать, как описано выше и повторить измерение.
Рассмотрим на конкретном примере.
Пример 1. Пусть доверительный интервал составляет (99,5…100,5)%. По результатам шести замеров величина kMI,av составила 101,3%. Следовательно, идентифицированное значение Тr больше реального, следует провести повторную серию замеров, снизив kT. По результатам повторной серии получили kMI,av=100,1%. Поскольку данная величина попадает в доверительный интервал, измерение в данной точке Idr можно считать оконченным, а идентифицированное значение Тr - достоверным.
Кроме того, наличие шумов и помех, либо слишком низкое значение величины ΔkMI,tol может обусловить «зависание» процедуры идентификации, а именно - многократное не попадание kMI,av в доверительный интервал.
Рассмотрим два типичных примера, когда при проведении процедуры идентификации на практике, могут возникнуть подобные случаи зависания:
Пример 2. Пусть доверительный интервал составляет (99,5…100,5)%.
Замер 1. kMI,av=102,3%, следует уменьшить kT, провести повтор.
Замер 2. KMI,av=98,5%), следует увеличить kT, провести повтор.
Замер 3. kMI,av=101,5%, следует уменьшить kT, провести повтор.
Замер 4. kMI,av=99,0%), следует увеличить kT, провести повтор.
Пример 3. Пусть доверительный интервал составляет (99,1…100,1)%.
Замер 1. kMI,av=99,8%), следует уменьшить kT, провести повтор.
Замер 2. kMI,av=100,1%, следует увеличить kT, провести повтор.
Замер 3. kMI,av=99,9%), следует уменьшить kT, провести повтор.
Замер 4. kMI,av=100,2%, следует увеличить kT, провести повтор.
Причиной зависания в примере 2, наиболее вероятно, является повышенная зашумленность сигнала момента либо слишком большое значение приращения ΔkT, которое может быть как положительным, так и отрицательным в зависимости от отклонения kMI,av в положительную либо отрицательную сторону от 100%).
Причина зависания в примере 3 - слишком низкое значение ΔkMI,tol т.е. слишком «узкий» доверительный интервал.
Для того чтобы избежать зависания, необходимо, во-первых, сгладить сигнал измеренного момента (и при необходимости - статорного тока), например, путем фильтрации; во-вторых, следует должным образом подбирать величину приращения ΔkT; в-третьих, нужно выбрать компромиссную величину ΔkMI,tol т.е. такую, чтобы, с одной стороны, обеспечить хорошую точность оценивания, а с другой - повысить вероятность попадания величины kMI,av в доверительный интервал. Например, для идентификации параметров тяговых машин авторы настоящей заявки использовали ΔkMI,tol=0,5%.
Необходимый инструментарий для проведения процедуры идентификации Тr и Lm.
Предлагаемая функциональная схема установки для проведения процедуры автоматической идентификации параметров показана на Фиг. 1.
Ниже приведено описание компонентов, входящих в состав предлагаемой установки.
Блок 1. Исследуемая машина (ИМ) асинхронная с короткозамкнутым ротором с вмонтированными датчиками скорости и температуры (ДС, ДТ). При необходимости, устанавливается система охлаждения обмоток ИМ.
Блок 2. Гонная машина (ГМ) с вмонтированными датчиками скорости и температуры (ДС, ДТ). При необходимости, устанавливается система охлаждения обмоток ГМ.
Блок 3. Силовой преобразователь, питающий обмотки ИМ (СПИ). Силовые модули СПИ управляются посредством контроллера. Датчики фазных токов (ДФТ) и датчик напряжения ЗПТ (ДН) обычно вмонтированы внутри блока СПИ.
Блок 4. Силовой преобразователь, питающий обмотки ГМ (СПГ).
Блок 5. Источник постоянного высоковольтного напряжения (ИПВН) для питания звена постоянного тока (ЗПТ).
Блок 6. Датчик крутящего момента (ДКМ) на валу спарки ИМ-ГМ. Авторы настоящей заявки используют датчик момента производства "Тензотехника".
Блок 7. Декодер, преобразующий измеренный сигнал момента из аналогового типа в цифровой тип. Авторы настоящей заявки используют декодер "Т-35", входящий в комплект с датчиком момента.
Блок 8. Программатор (JTAG эмулятор) для прошивки контроллера. Авторы настоящей заявки используют JTAG-эмулятор производства компании "Sauris".
Блок 9. Переходник USB-CAN для обмена данными между ПК и контроллером.
Блок 10. Персональный компьютер (ПК).
Подготовка эксперимента.
1. Испытательный стенд подготавливается согласно схеме Фиг. 1. При этом валы ИМ и ГМ должны быть жестко соединены между собой.
2. От источника высоковольтного источника ИПВН подается напряжение UDC, питающее СПИ и СПГ. Напряжение должно быть такой величины, чтобы максимальное значение преобразованного посредством СП трехфазного переменного напряжения было не ниже номинального значения напряжения питания статорных обмоток ИМ.
3. Вал ГМ раскручивается до нужной частоты вращения, при которой будет проводиться эксперимент. ГМ должна работать в режиме поддержания частоты вращения и выдерживать максимальную нагрузку, которая будет набрасываться посредством ИМ, о чем следует позаботиться заранее.
4. При необходимости (и наличии) включаются системы охлаждения ИМ и ГМ;
5. Управляющий контроллер СПИ посредством программатора «прошивается» необходимым ПО, которое позволяет проводить процедуру идентификации. Подробнее этот вопрос будет описан ниже;
6. На ПК запускается программа идентификации, после чего процедура может быть начата.
Особенности программного обеспечения управляющего контроллера, реализующего векторное управление исследуемой асинхронной машиной.
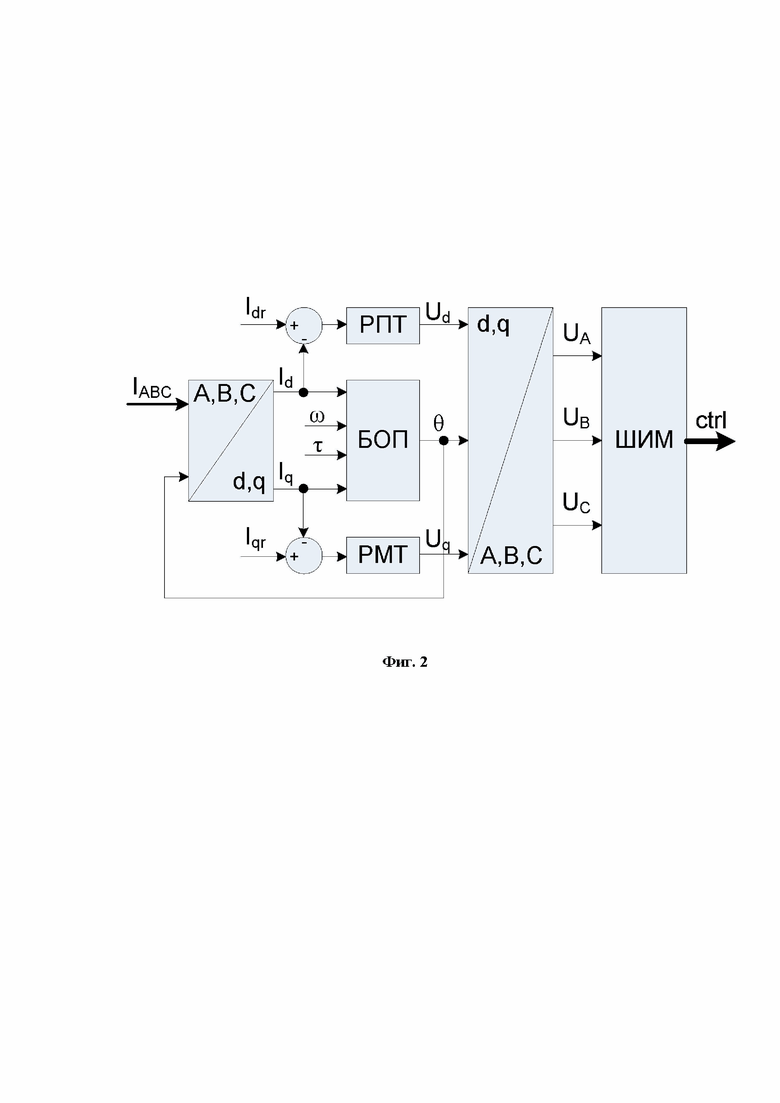
Дадим описание базовой структуры системы управления (показана на фиг.2), которая требуется для проведения описанной процедуры идентификации.
В структуру СУ входят:
• регуляторы потокообразующего и моментообразующего тока статора (РПТ, РМТ);
• блок определения модуля и угла поворота вектора потокосцепления ротора (БОП);
• координатные преобразователи Парка и Кларка для перевода токов из неподвижной трехфазной системы координат в ортогональную вращающуюся СК (A,B,C-d,q) и напряжений на выходе регуляторов в обратном направлении (d,q-A,B,C)
• блок формирования широтно-импульсной модуляции (ШИМ).
Опционально система управления может быть дополнена другими блоками, реализующими различного рода защиты и ограничения, однако в настоящей заявке эти вопросы не рассматриваются, поскольку относятся к нюансам синтеза системы управления.
Входные сигналы заданных токов Idr, Iqr являются управляющими воздействиями, которые задаются пользователем в программе идентификации, как описано выше.
Посредством получаемого от ДФТ сигнала трехфазного тока IABC, координатного преобразователя A,B,C-d,q, а также сигнала угла поворота 0 системы координат d-q, формируются сигналы обратных связей токов Id, Iq. Сигналы ошибок отработки поступают на регуляторы РПТ, РМТ, которые, в свою очередь, формируют сигналы заданных напряжений Ud, Uq. Данные сигналы преобразуются в сигналы UA, UB, UC трехфазной системы координат, и поступают на блок формирования ШИМ для управления ключами СПИ. Блок БОП формирует сигнал угла поворота вектора потокосцепления ротора (системы координат d-q).
Описание алгоритма идентификации.
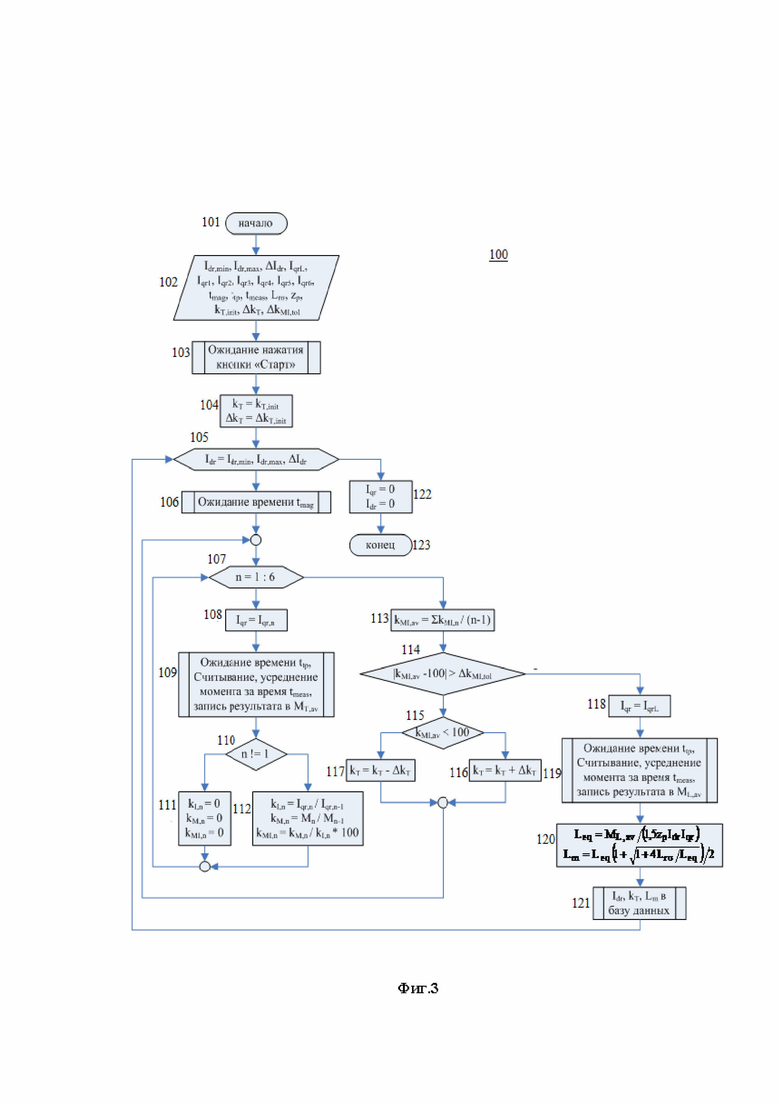
Схема алгоритма 100 идентификации параметров приведена на фиг.3.
Блок 101. Точка входа в алгоритм идентификации.
Блок 102. Вводятся исходные данные:
• Диапазон изменения потокообразующего тока и шаг (приращение), что соответствует параметрам Idrmin, Idrmax, ΔIdr;
• Шесть значений моментообразующего тока, при котором будут выполняться замеры для идентификации постоянной времени ротора и одно значение для расчета взаимной индуктивности, что соответствует параметрам IqrT1…IqrT6 и IqrL;
• Начальное значение коэффициента постоянной времени и его приращения, что соответствует величинам kT,init, ΔkT;
• Доверительный интервал оценивания постоянной времени ротора, соответствующий величине ΔkMI,tol;
• Число пар полюсов AM и индуктивность рассеяния ротора.
Блок 103. После того как в программе проинициализированы все переменные и выполнены все предварительные процедуры, она готова непосредственно к началу процедуры идентификации. Ожидается нажатие кнопки «Старт».
Блок 104. На следующем этапе выполняется инициализация переменных, т.е. присваивание переменным kT, ΔkT.
Блок 105. Начало «большого» цикла. Переменной Idr присваивается начальное (минимальное) значение Idr,min.
Блок 106. Поскольку поле машины нарастает за некоторое время (переходной процесс длиться [3…5]Тr), программа отсчитывает это время и выполняется переход к следующему блоку.
Блок 107. Начало внутреннего цикла. Параметру n присваивается значение 1.
Блок 108. Переменной Iqr присваивается одно из заданных пользователем значений, соответствующее порядковому номеру n.
Блок 109. Ожидание некоторого времени ttp до установившегося процесса. После этого, момент на валу посредством датчика измеряется несколько раз за время tmeas, при необходимости фильтруется, затем усредняется. Результат записывается в переменную МT,аv,n.
Блок 110. Проверяется условие «n !=1», после чего по ветви «-» происходит переход к блоку 111, а по ветви «+» - к блоку 112.
Блок 111. В случае нахождения в первой точке (первый замер), параметрам kI,n, kM,n, kMI,n присваиваются нулевые значения.
Блок 112. В случае если n=2…6, параметры kI,n, kM,n, kMI,n рассчитываются по формулам (6), (11) (блок 112).
Блок 113. После шести замеров момента происходит выход из внутреннего цикла, рассчитывается величина kMI,av (блок 13).
Блок 114. Проверяется попадание kMI,av в доверительный интервал, т.е. проверяется условие |kMI,av - 100|>ΔkMI,tol
Блок 115. Если условие предыдущего шага выполняется (ветвь «+») проверяется отклонение в положительную или отрицательную сторону величины kMI,av относительно 100%.
Блок 116. При отклонении kMI,av в положительную сторону величина kT получает положительное приращение ΔkT,m, затем алгоритм возвращается к блоку 107.
Блок 117. В противоположном случае величина kT получает отрицательное приращение - ΔkT,m, затем алгоритм возвращается к блоку 107.
Блок 118. В случае попадания kMI,av в ДИ, алгоритм переходит к расчету Lm. Для этого переменной Iqr присваивается значение IqrL.
Блок 119. Ожидание некоторого времени ttp до установившегося процесса. После этого, момент измеряется несколько раз за время tmeas, при необходимости фильтруется, затем усредняется. Результат записывается в переменную МL,av,n.
Блок 120. Выполняется расчет эквивалентной индуктивности по формуле (8) и взаимной индуктивности по формуле (10)
Блок 121. Параметры Idr, kT, Lm вносятся в базу данных в виде таблицы, как показано ниже (табл. 1):
Блок 122. Как только идентификация заканчивается в последней точке Idr=Idrmax, переменные Iqr и Idr обнуляется.
Блок 123. Конец процедуры идентификации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ПОТОКОСЦЕПЛЕНИЯ РОТОРА АСИНХРОННОГО ДВИГАТЕЛЯ В СОСТАВЕ ЭЛЕКТРОПРИВОДА С ВЕКТОРНЫМ ПОЛЕОРИЕНТИРОВАННЫМ УПРАВЛЕНИЕМ ПРИ РАБОТЕ В ЗОНЕ ОГРАНИЧЕННОГО НАПРЯЖЕНИЯ | 2021 |
|
RU2759558C1 |
| Способ оптимизации работы асинхронной машины по минимуму статорного тока и максимуму коэффициента полезного действия при полеориентированном векторном управлении | 2022 |
|
RU2798499C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
Изобретение относится к способу управления электродвигателями с помощью векторного управления. Способ идентификации постоянной времени Tr ротора асинхронного двигателя в системе векторного полеориентированного управления заключается в том, что задают начальные значения постоянной времени Tr ротора и тока Id, далее не менее двух раз задаются разные значения тока Iq, при которых измеряется момент на валу асинхронного двигателя, фиксируют в заданный момент времени значения угловой частоты вращения ротора, магнитного потока и нагрузки на роторе, и с учетом этих параметров фиксируют изменение моментообразующей составляющей тока Iq, которая будет соответствовать новому значению Iq1, а также значение электромагнитного момента М1. Далее при изменении нагрузки на валу асинхронного двигателя также фиксируют новое значение Iq2, а также новое значение электромагнитного момента М2. Далее вычисляют соотношения токов КI и соотношения моментов KM согласно уравнениям, где КI=Iq2/Iq1 и KM=М2/М1, осуществляют проверку выполнения условия, при котором КI = KM. Управляют асинхронным двигателем при значении постоянной времени Tr ротора, при котором выполняется условие КI=KM. Технический результат заключается в повышении точности ориентации поля системы векторного управления асинхронным двигателем. 2 табл., 3 ил.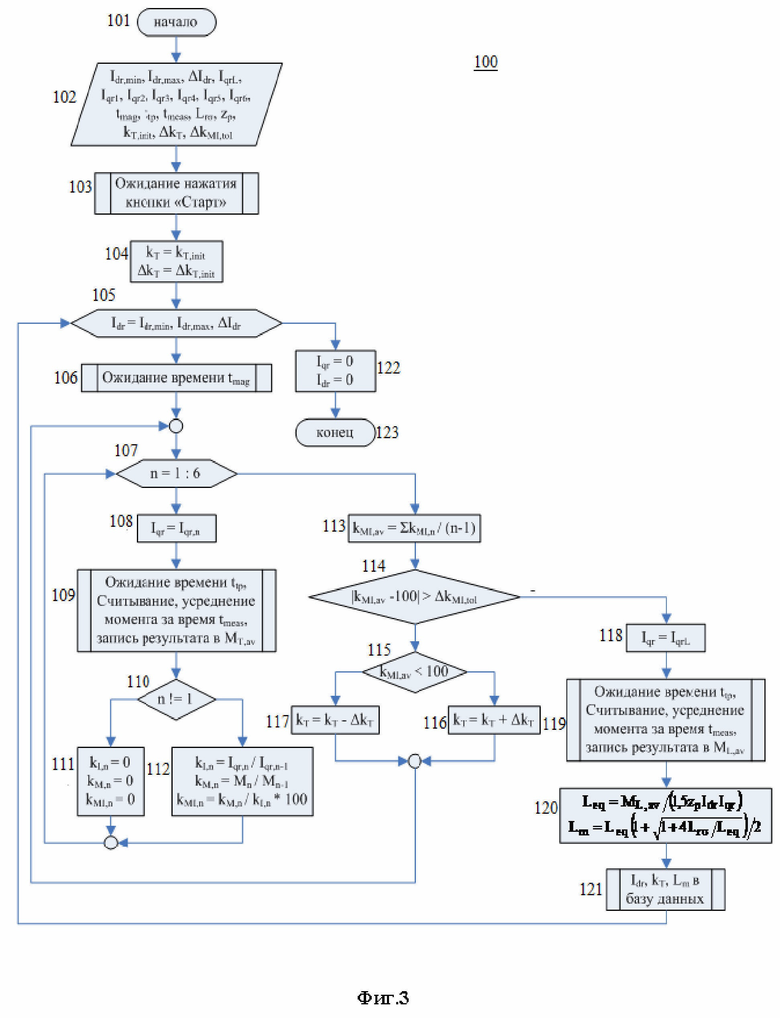
Способ идентификации постоянной времени Tr ротора асинхронного двигателя в системе векторного полеориентированного управления, заключающегося в том, что осуществляют выполнение следующих этапов:
a) задают начальное значение постоянной времени Tr ротора в блоке оценки потокосцепления ротора и начальное значение тока Id, далее не менее двух раз задаются разные значения тока Iq, при которых измеряется момент на валу асинхронного двигателя;
b) фиксируют в заданный момент времени значения угловой частоты вращения ротора, магнитного потока и нагрузки на роторе, и с учетом этих параметров фиксируют изменение моментообразующей составляющей тока Iq, которая будет соответствовать новому значению Iq1, а также значение электромагнитного момента М, который будет соответствовать новому значению М1, при этом устанавливают, что параметры Iq1 и М1 соответствуют параметрам работы асинхронного двигателя в первой рабочей точке, далее при изменении нагрузки на валу асинхронного двигателя также фиксируют изменение Iq, которая будет соответствовать новому значению Iq2, а также значение электромагнитного момента М, который будет соответствовать новому значению М2, с учетом данных параметров фиксируют переход работы асинхронного двигателя в новую рабочую точку;
c) далее запускают процесс вычисления соотношения токов КI и соотношения моментов KM в разных рабочих точках согласно уравнениям, где КI = Iq2/Iq1 и KM = М2/ М1;
d) далее осуществляют проверку выполнения условия, при котором отношение токов должно быть равно отношению моментов, а именно КI = KM;
e) если условие по этапу d) не выполняется, осуществляют корректировку выбранного значения постоянной времени Tr путем её увеличения или уменьшения и повторяют этапы a)-d) до тех пор, пока условие КI = KM не будет выполняться;
f) осуществляют управление асинхронным двигателем при таком значении постоянной времени Tr ротора, которое привело к выполнению условия КI = KM.
| RU 2132110 C1, 20.06.1999 | |||
| ЭЛЕКТРОХИМИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ МЕХАНИЧЕСКИХ ВОЗДЕЙСТВИЙ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 0 |
|
SU180979A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| CN 107896079 A, 10.04.2018. | |||

