Предлагаемое техническое решение относится к области электротехники и может быть использовано для векторного управления явнополюсным синхронным двигателем с постоянными магнитами, обеспечивая высокую точность регулирования при минимизации тепловых потерь за счет подачи переменного напряжения требуемой амплитуды и фазы. Изобретение может быть использовано в электроприводе транспорта, где в условиях ограничения напряжения и тока важно передать исполнительному механизму большую мощность за счет эффективного использования электрической машины при различной нагрузке.
Аналогичные технические решения известны см., на пример описание изобретения заявки на патент Японии №2006 - 121855, техническая сущность которого заключается в нижеследующей совокупности существенных признаков:
- формируют сигнал управление синхронным двигателем;
- преобразуют сигнал управления в два сигнала задания с помощью карты памяти, в которой записаны результаты экспериментальных исследований работы двигателя при минимуме тепловых потерь, посредством которых формируется напряжение требуемой амплитуды и фазы.
- измеряют фазные токи;
- преобразуют сигналы измеренных фазных токов в зависимости от гармонических сигналов датчика положения, механически связанного с ротором синхронного двигателя, в два сигнала обратной связи;
- сравнивают сформированные сигналы задания с сигналами обратной связи и их разность подают на соответствующие регуляторы;
- преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения, в управляющие сигналы;
- управляющие сигналы преобразуют посредством широтно-импульсной модуляции в управляющие напряжением импульсы;
- подают управляющие напряжением импульсы на соответствующие входы силового преобразователя;
- посредством широтно-импульсной модуляции преобразуют постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трехфазное напряжение;
- получают переменное трехфазное напряжение
- подают переменное трехфазное напряжение через датчики тока на статорные обмотки синхронного электродвигателя;
управляют синхронным электродвигателем.
Известно также аналогичное техническое решение, смотри описание изобретения RU №2397601, которое выбрано в качестве ближайшего аналога прототипа и которое заключается в нижеследующей совокупности существенных признаков:
- формируют сигнал управление синхронным двигателем;
- преобразуют сигнал управления в два дополнительных сигнала задания, связанных с сигналом управления посредством аппроксимации нелинейных функций, обеспечивающих формирование переменного напряжения на обмотках двигателя требуемой амплитуды и фазы.
- измеряют фазные токи;
- преобразуют сигналы измеренных фазных токов в зависимости от гармонических сигналов датчика положения механически связанного с ротором синхронного двигателя в два сигнала обратной связи;
- сравнивают сформированные сигналы задания с сигналами обратной связи и их разность подают на два регулятора;
- преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения, в управляющие сигналы;
- управляющие сигналы преобразуют посредством широтно-импульсной модуляции в управляющие напряжением импульсы;
- подают управляющие напряжением импульсы на соответствующие входы силового преобразователя;
- посредством широтно-импульсной модуляции преобразуют постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трехфазное напряжение;
- получают переменное трехфазное напряжение;
- подают переменное трехфазное напряжение через датчики тока на статорные обмотки синхронного электродвигателя;
- управляют синхронным электродвигателем.
Общими признаками предлагаемого способа управления синхронным двигателем и выше охарактеризованными аналогичными техническими решениями являются:
- формируют сигнал управление синхронным двигателем;
- преобразуют сигнал управления в два сигнала задания;
- измеряют фазные токи;
- преобразуют сигналы измеренных фазных токов в зависимости от гармонических сигналов датчика положения механически связанного с ротором синхронного двигателя в сигналы обратной связи;
- сравнивают сформированные сигналы задания с сигналами обратной связи и их разность подают на регуляторы;
- преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения, в управляющие сигналы;
- управляющие сигналы преобразуют посредством широтно-импульсной модуляции в управляющие напряжением импульсы;
- подают управляющие напряжением импульсы на соответствующие входы силового преобразователя;
- посредством широтно-импульсной модуляции преобразуют постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трехфазное напряжение;
- получают переменное трехфазное напряжение
- подают переменное трехфазное напряжение через датчики тока на статорные обмотки синхронного электродвигателя; управляют синхронным электродвигателем.
Все вышеперечисленные признаки прототипа являются общими с предлагаемым для патентования техническим решением.
Технический результат, который невозможно достичь ни одним из аналогичных выше охарактеризованных технических решений, заключается в повышении точности управления синхронным двигателем при минимизации тепловых потерь.
Причиной сложности достижения вышеуказанного технического результата является существенная нелинейность двигателя при минимизации тепловых потерь, не позволяющая предложенными выше способами точно минимизировать потери в двигателе и точно управлять явнополюсным синхронным двигателем с постоянными магнитами.
Анализируя аналогичные технические решения и рассматривая их характеристики можно сделать вывод, что задача поиска способов и создания устройств управления по минимуму тока явнополюсным синхронным двигателем, обладающим высокой точностью регулирования и прогнозируемостью управления является актуальной на сегодняшний день. Решение этой задачи позволит снизить потери в стали и меди, снизить реактивную мощность и увеличить мощность, отдаваемую исполнительному механизму за счет увеличения скорости и электромагнитного момента при ограничении напряжения и тока источника питания, что особенно актуально при управлении электромобилем для увеличения дальности перевозок на одном заряде аккумулятора.
Технический результат, заключающийся в повышении точности управления, достигается тем, что в способе управления явнополюсным синхронным двигателем преобразование сигнала управления в два сигнала задания, необходимых для формирования трехфазного напряжения требуемой амплитуды и фазы, осуществляется с высокой точностью за счет вычисления необходимого положения тока. Кроме того, для линеаризации и прогнозируемости управления синхронной машиной при минимизации тепловых потерь, сформированы регуляторы, на вход которых подают разность сигналов задания и сигналов обратной связи. Точное преобразование сигнала управления в два сигнала задания, обеспечивающих формирование трехфазного напряжения требуемой амплитуды, в совокупности с регуляторами, обеспечивающими линеаризацию и прогнозируемость управления при минимизации тепловых потерь, обеспечивают повышение точности управления синхронным двигателем.
Техническая сущность предлагаемого способа управления явнополюсным синхронным двигателем заключается в следующем:
- формируют сигнал управление синхронным двигателем;
- преобразуют сигнал управления в два сигнала задания, обеспечивающие получение необходимого переменного трехфазного напряжения для управления синхронным двигателем;
- измеряют фазные токи;
- преобразуют сигналы измеренных фазных токов в два сигнала обратной связи;
- сравнивают сформированные сигналы задания с сигналами обратной связи и их разность подают на два регулятора;
- преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения, в управляющие сигналы;
- управляющие сигналы преобразуют посредством широтно-импульсной модуляции в управляющие напряжением импульсы;
- подают управляющие напряжением импульсы на соответствующие входы силового преобразователя;
- посредством широтно-импульсной модуляции преобразуют постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трехфазное напряжение;
- получают переменное трехфазное напряжение
- подают переменное трехфазное напряжение через датчики тока на статорные обмотки синхронного электродвигателя;
- управляют синхронным электродвигателем.
При этом преобразование сигнала управления в два сигнала задания, необходимых для формирования трехфазного напряжения требуемой амплитуды и фазы осуществляется с высокой точностью за счет вычисления необходимого положения тока. Кроме того, для линеаризации и прогнозируемости управления синхронной машиной, обеспечивающего повышение точности регулирования при минимизации тепловых потерь сформированы нелинейные регуляторы, на вход которых подают разность сигналов задания и сигналов обратной связи.
Проведенный анализ совокупности существенных признаков предлагаемого к патентованию способа управления синхронным двигателем показал, что ни одно из известных технических решений не содержит, как всей совокупности существенных признаков, так и отличительных признаков, что позволило сделать вывод о наличии критериев патентоспособности «новизна» и «изобретательский уровень».
Предлагаемый способ управления явнополюсным синхронным двигателем можно пояснить, рассмотрев функциональную схему ФИГ. 1, реализующую предлагаемый способ управления синхронным двигателем. Схема содержит:
- источник-1 сигнала задания управления Tref обеспечивает задание управления явнополюсным двигателем;
- преобразование 2 сигнала управления Tref, в два сигнала задания Udref Uqref, обеспечивающих формирование напряжение двигателя 14 требуемой амплитуды и фазы, осуществляется посредством вычисления положения тока, доставляющее минимум потерь в двигателе, с помощью сигналов id, iq, несущих полную информацию о мгновенных значениях фазных токах двигателя, полученных в результате прямого преобразования по схеме 6 в зависимости от сигналов sin(θ), cos(θ) датчика положения 13, механически связанного с ротором двигателя 14 и сигналов датчиков тока 10, 11 и 12.
- сравниваются 3 сигналы задания Udref, Uqref с сигналами обратной связи, сформированными в результате преобразования сигналов тока id, iq, полученными посредством преобразования 6.
- регуляторы 4 преобразует разностные сигналы полученные в результате сравнения 3, обеспечивая линейность и прогнозируемость системы управления при регулировании напряжения двигателя 14 в зависимости от сигнала задания управления Tref.
- обратное 5 преобразование необходимо для преобразования сигналов с выхода регуляторов 4 в зависимости от гармонических сигналов sin(θ), cos(θ) датчика положения 13, механически связанного с ротором синхронного двигателя 14, в управляющие сигналы трехфазной системы А, В, С, поступающие на формирователь 7 импульсов широтно-импульсной модуляции управления.
- прямое 6 преобразование обеспечивает преобразование сигналов с датчиков фазных токов, посредством гармонических сигналов sin(θ), cos(θ) датчика положения 13, механически связанного с ротором синхронного двигателя 14 в сигналы id, iq, несущие полную информацию о мгновенных значениях фазных токов:
- формирование 7 импульсов управления обеспечивает преобразование сигналов управления трехфазной системы А, В, С полученными в результате преобразования 5 сигналов в импульсы широтно-импульсной модуляции управления ключевыми элементами преобразователя 9;
- источник 8 постоянного напряжения;
- преобразователь 9 обеспечивает преобразование постоянного напряжения источника питания 8 в переменное трехфазное напряжение, подводимое к двигателю 14, посредством ключевых элементов, управление которыми осуществляется сформированными в 7 импульсами широтно-импульсной модуляции;
- датчики 10, 11 и 12 фазных токов, сигналы с которых прямо преобразуются в 6 посредством гармонических сигналов sin(θ), cos(θ) датчика положения 13, механически связанного с ротором синхронного двигателя 14 в сигналы id, iq, несущие полную информацию о фазном токе двигателя, соединяют выходы преобразователя 9 с синхронным двигателем 14;
- датчик 13 положения, механически связанный с ротором синхронного двигателя 14, формирует в функции электрического угла G положения ротора гармонические сигналы sin(θ), cos(θ);
- синхронный 14 явнополюсный двигатель с постоянными магнитами, на валу ротора которого установлен датчик положения 13;
Решения, входящие в состав функциональной схемы, реализующие способ управления явнополюсным синхронным двигателем с постоянными магнитами широко известны и опубликованы в различных источниках информации.
Предложенная функциональная схема ФИГ. 1, реализующая способ управления по минимуму тока синхронным двигателем отличается от известных решений узлами 2, 3 и 4, которые работают следующим образом.
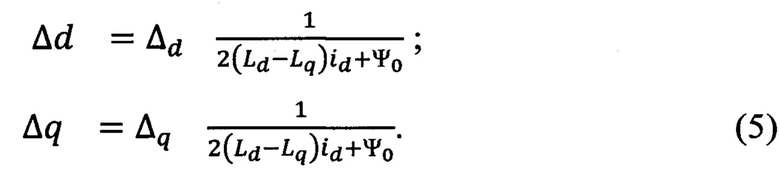
Напряжение, подводимое к обмоткам синхронного двигателя, обеспечивающее управление при минимальном токе формируют сигналом задания Tref, который преобразуют 2 в два (1) сигнала задания Udref, Uqref, позволяющих сформировать напряжение требуемой амплитуды и фазы с помощью угла, характеризующего положение вектора тока при минимизации потерь в двигателе. Преобразование 2 осуществляется с помощью дополнительных сигналов снимаемых с датчиков 10,11,12 фазного тока ФИГ. 1 и стандартно преобразованных 6 в сигналы id, iq> посредством которых вычисляется необходимое положение тока, характеризуемое углом μopt (2) при котором управление ФИГ.2 осуществляется при минимальном токе в зависимости от его модуля i:


Сигналы сформированы таким образом, чтобы при положительном сигнале задания Tref, tan(μopt) был отрицательным (3), при отрицательном сигнале Tref, tan(μopt) должен быть положительным.
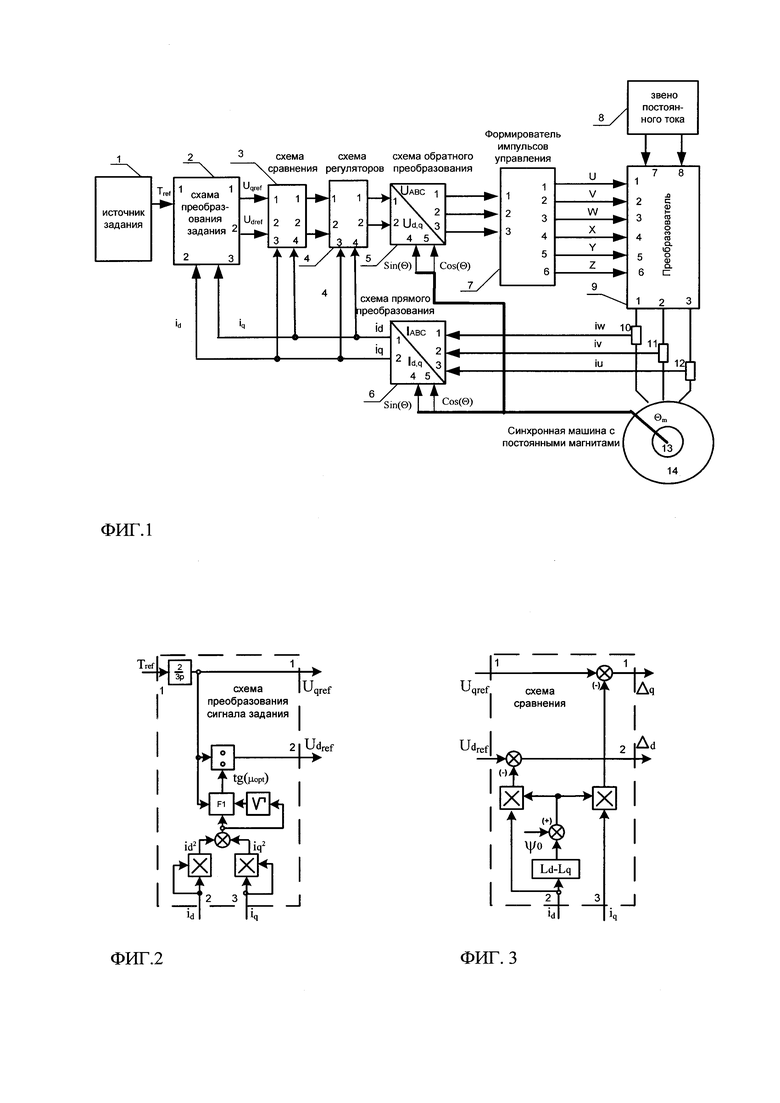
Сформированные сигналы Udref, Uqref сравниваются 3 с преобразованными сигналами обратной связи ФИГ. 3, сформированными посредством преобразования сигналов id, iq, полученными путем преобразования 6 сигналов с датчиков тока 10, 11 и 12:
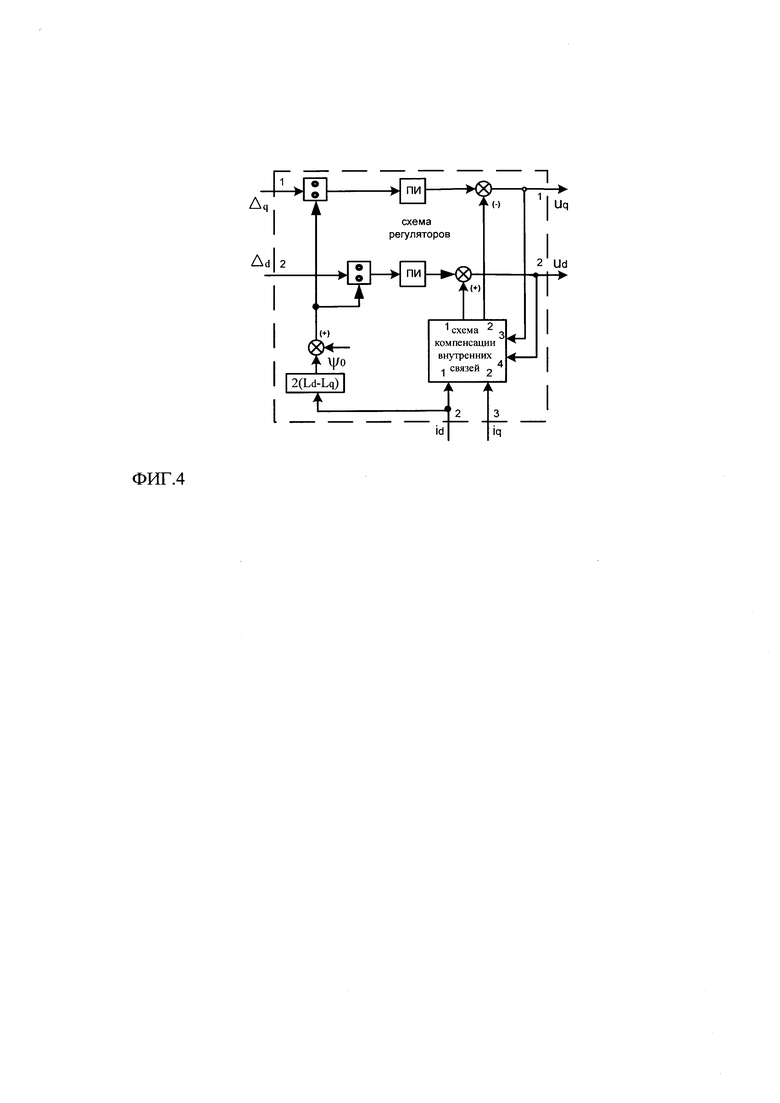
Разностные сигналы Δd, Δq преобразуют и подают на пропорционально-интегральный регулятор ФИГ. 4 обеспечивая линейность и прогнозируемость системы управления:
Осуществляя стандартную компенсацию внутренних связей, параметры регуляторов kid kiq, kpd, kpd настроены по методике подчиненного регулирования таким образом, что бы быстродействие замкнутых контуров было одинаково:

Линейность системы управления при минимизации тепловые потерь, наряду с точным преобразованием сигнала управления в два сигнала задания позволяет существенно повысить точность управления, в чем и проявляется достижение вышеуказанного результата. Повышение точности регулирования обеспечивает точное выполнение условий минимизации тепловых потерь, что позволяет повысить мощность, отдаваемую исполнительному механизму, за счет снижения реактивной мощности и увеличение электромагнитного момента и скорости в условиях ограничения тока и напряжения источника питания 8.
Сигналы ФИГ. 1, с выходов регуляторов ud, uq поступают на схему обратного преобразования 5, где посредством гармонических сигналов sin(θ), cos(θ) датчика положения 13, механически связанного с ротором синхронного двигателя 14, преобразуют в сигналы управления трехфазной системы А, В, С, которые подаются на формирователь импульсов 7, где в соответствии с сигналами управления А, В, С формируют импульсы управления широтно-импульсной модуляции, которые подаются на ключевые элементы преобразователя 9 постоянного напряжения 8 в напряжение, которое через датчики фазного тока 10,11 и 12 подается на обмотки синхронного двигателя 14, обеспечивая регулирование выходных величин с высокой точностью за счет нового способа преобразования 2 сигнала управления Tref два сигнала задания и нелинейного регулятора 4, обеспечивающего линейность структуры управления при минимизации тепловых потерь.
Таким образом предлагаемый для патентования способ управления явнополюсным синхронным двигателем, за счет точного преобразования сигнала управления в сигналы задания посредством вычисления положения тока и нелинейного регулятора, обеспечивающего линеаризацию и прогнозируемость управления синхронным двигателем, подавая на статорные обмотки переменное трехфазное напряжение, позволяет осуществить более точное управление явнополюсным синхронным двигателем при минимальном токе.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПРИ МИНИМИЗАЦИИ РЕАКТИВНОЙ МОЩНОСТИ | 2024 |
|
RU2829487C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2456742C1 |
| Способ управления синхронным электродвигателем на постоянных магнитах | 2018 |
|
RU2683586C1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ НА ОСНОВЕ ЯВНОПОЛЮСНОЙ СИНХРОННОЙ МАШИНЫ | 2010 |
|
RU2435291C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2522675C2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404504C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2582202C1 |
Изобретение относится к области электротехники и может быть использовано для векторного управления явнополюсным синхронным двигателем с постоянными магнитами. Техническим результатом изобретения является повышение точности управления синхронным двигателем при минимизации тепловых потерь. Этот результат достигается за счет точного преобразования сигнала управления в два сигнала задания посредством вычисления необходимого положения тока, предсказуемости и линеаризации управления за счет применения регулятора. Техническая сущность предлагаемого способа управления явнополюсным синхронным двигателем заключается в следующем. Формируют сигнал управления синхронным двигателем, преобразуют сигнал управления в два сигнала задания, измеряют фазные токи, преобразуют сигналы измеренных фазных токов в два сигнала обратной связи, сравнивают сформированные сигналы задания с сигналами обратной связи и их разность подают на два регулятора, преобразуют сигналы с выхода регуляторов, используя гармонические сигналы датчика положения. Преобразованные сигналы посредством широтно-импульсной модуляции преобразуют в управляющие импульсы. Подают управляющие импульсы на соответствующие входы силового преобразователя, преобразуют посредством широтно-импульсной модуляции постоянное напряжение, подводимое к соответствующим входам силового преобразователя, в переменное трехфазное напряжение, получают переменное трехфазное напряжение, подают переменное трехфазное напряжение на статорные обмотки синхронного электродвигателя, управляют синхронным двигателем. 4 ил.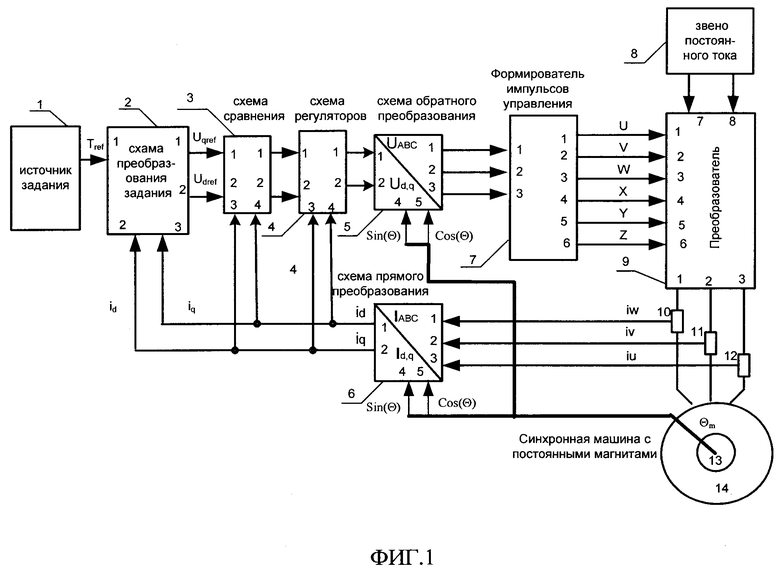
Способ векторного управления по минимуму тока явнополюсным синхронным двигателем, заключающийся в том, что формируют сигнал управления, преобразуют сигнал управления в два сигнала задания, обеспечивающие получение требуемого напряжения для управления синхронным двигателем, сравнивают сигналы задания с сигналами обратной связи, получают разность этих сигналов и подают на регуляторы, преобразуют сигналы с выхода регуляторов в управляющие импульсы, подают управляющие импульсы на соответствующие входы преобразователя напряжения, преобразуют постоянное напряжение в переменное трехфазное напряжение, подводимое к статорным обмоткам синхронного двигателя, управляют явнополюсным синхронным двигателем, отличающийся тем, что преобразование сигнала управления в два сигнала задания, необходимых для формирования трехфазного напряжения требуемой амплитуды и фазы, осуществляется с высокой точностью, достигаемой за счет вычисления в функции модуля тока i необходимого положения вектора тока, доставляющего минимум потерь в синхронном двигателе, и линеаризации управления, обеспечивающего повышение точности регулирования синхронной машиной, путем формирования нелинейных регуляторов, на вход которых подают разностные сигналы задания и сигналы обратной связи.
| CN 102710210 A, 03.10.2012 | |||
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ТЯГИ И СИЛОВОЙ ПЕРЕДАЧИ C СИНХРОННЫМ ДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ | 2018 |
|
RU2740000C1 |
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ ДВИГАТЕЛЯ С СИНХРОНИЗАЦИЕЙ НА ПОСТОЯННОМ МАГНИТЕ | 2006 |
|
RU2397601C1 |
| WO 2018100626 A1, 07.06.2018 | |||
| ВЕКТОРНЫЙ РЕГУЛЯТОР ДЛЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2006 |
|
RU2407140C1 |
| CN 108448961 A, 24.08.2018 | |||
| JP 2006121855 A, 11.05.2006. | |||
